Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Jerk (physics) wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Fictitious force wikipedia , lookup
Analytical mechanics wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Faster-than-light wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Classical mechanics wikipedia , lookup
Seismometer wikipedia , lookup
Center of mass wikipedia , lookup
Variable speed of light wikipedia , lookup
Velocity-addition formula wikipedia , lookup
Hunting oscillation wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Matter wave wikipedia , lookup
Routhian mechanics wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Four-vector wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Equations of motion wikipedia , lookup
Specific impulse wikipedia , lookup
Phys 325 Lecture 4. Thursday Jan 29, 2015
Bead on a whirling rod continued……
Some kinematics: ( See p 33 of T+M, example 1.8. Or see section 1.7 of Taylor )
Position vector:
r
r = r(t) rˆ
Velocity vector:
r
r
& rˆ + r(t)drˆ / dt
v = dr / dt = r(t)
As it sometimes happens, our unit vectors are changing in time as the rod rotates. Hence the
second term is not zero. A little bit of geometry establishes that our unit vectors are changing
solely due to changes in φ:
drˆ / dt = φ& (t)φˆ;
dφˆ / dt = −φ& (t)rˆ
Alternatively, these can be established by first noting that
rˆ = iˆ cos φ + ˆj sin φ;
φˆ = −iˆ sin φ + ˆj cos φ ,
and then taking time derivatives. e.g. using chain rule: r&ˆ = −iˆ sin φ φ& + ˆj cos φ φ& = φˆφ&
See if you can derive dφˆ / dt = −φ& (t)rˆ this way.
Thus
r
& rˆ + r(t)φ& φˆ
v = r(t)
a result which may seem a little obvious. The velocity has two orthogonal components, dr/dt in
the outward direction, and r(t) dφ/dt in the direction of increasing φ . The latter term may be
familiar from Phys 211 in the form Rω.
Acceleration vector:
Taking d/dt of the velocity vector, and recalling the above expressions for how the unit vectors are
changing, we find after a bit of algebra:
r d
& rˆ + r(t)φ& φˆ ) = &&
& r&ˆ + r(t)
& φ& φˆ + r(t)φ&& φˆ + r(t)φ& φ&ˆ
a = (r(t)
r(t) rˆ + r(t)
dt
= (&&
r(t) − r(t)φ& 2 )rˆ + (r(t)φ&& + 2 r&φ& )φˆ
The r-component of this may look familiar; note the contribution of the centripetal term -r ω2.
The φ component is perhaps less obvious. It is worthwhile to examine all four of these terms to
confirm that they are dimensionally correct.
We now return to the bead on the rod.
F = ma becomes
29
N(t)φˆ = m(&&
r(t) − r(t)2 φ& 2 )rˆ + m(r(t)φ&& + 2 r&φ& )φˆ
There are two components of this equation. I will discuss the φˆ component below. The rˆ component tells us
0 = &&
r(t) − r(t)φ& 2 ;
or
&&
r(t)= r(t)ω 2
which is a homogeneous linear second order constant coefficient ODE for r(t). Let us solve it by
following the (hopefully familiar?) suggestion to try exponential solutions whenever you have a
linear constant coefficient homogeneous ODE : Try r(t) = exp(λt)
Substituting this we find that λ = ±ω. There are therefore two values of λ that permit exp(λt) to be
a solution. Either one gives us a solution of the differential eqn. Because the eqn is linear and
homogeneous, then any linear combination of solutions is also a solution. We write
r(t) = A exp(ωt) + B exp(-ωt)
This satisfies the ODE for any choice of constants A and B. (check that!) The constants of
integration A and B can be determined by invoking initial conditions. For example, if at t= 0, r =
ro, and dr/dt = vr = 0, then
r o= A + B
0 = ω (A-B).
Thus A = B = ro/2 and
r(t) = (1/2) ro [ exp(ωt) + exp(-ωt) ] = ro cosh(ωt)
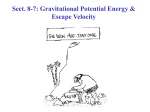
The particle moves out on the rod in an exponential spiral.
The plot is the position of the bead (the dots are for equally spaced intervals of time.) Once it
comes off the rod (not shown) it would of course move in a straight line, since there would then be
no forces on it.
30
The φˆ component of F= ma is perhaps less interesting; it tells us only what N must be to keep the
particle on the rod
N(t) = m{r(t)φ&& + 2 r&φ&} = 2m&rω
you will need this for the HW in which there is a friction force proportional to N
--Query : This particle goes faster and faster as it moves out. Why isn't it conserving energy?
Answer: N is doing work on the particle! N dot v = (2m r& ω ) (r ω) = m ω2 dr2/dt ≠ 0. Something
is doing work on the system and a little reflection indicates that there must be a motor that is
maintaining the constant speed ω.
------In HW2 you are to consider a mass sliding on a
frictionless horizontal table and being pulled inwards
by a cord ( of as yet unknown tension T) at a constant
radial speed. This is a 2-d polar coordinate problem
for which you will need both F and a in polar
coordinates. r(t) is specified, so the interesting
question is the differential equation for φ.
-----Here is a problem using 3-d spherical coordinates, of a
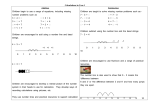
bead on a spinning wire hoop.
A hoop of radius R spins on its vertical axis at a fixed rate Ω as illustrated
31
with a bead of mass m free to slide along the hoop. We wish to determine the ODE that governs
θ(t) This problem is a natural for spherical coordinates. The bead has spherical coordinates:
r(t) = R constant. It has azimuthal coordinate φ = Ω t specified. Its other spherical coordinate is
θ(t) which is to be determined. Spherical coordinates often take θ to be defined as angle from the
north pole, but it is easier to do it from the south pole here, as the south pole is an obvious stable
equilibrium point when the hoop is not spinning; the bead sits at the bottom.
You may find it useful to think of these coordinates as they are used in geography: r is radius of
the earth plus altitude, φ is longitude; θ is latitude above the south pole.
The force on the bead is some as yet unknown normal force Nφ(t) that acts in the φ direction, plus
some other unknown normal force Nr(t) that acts radially, plus gravity - mg{rˆ cosθ − θˆ sin θ }
Therefore the total force is
r
F = mg{rˆ cosθ − θˆ sin θ } + N r rˆ + Nφφˆ
[ The quantities N may end up negative so don't worry about the signs in front of them ].
We also need to do the kinematics: How do the three components of acceleration ( and velocity)
depend on how fast the coordinates are changing?
Oddly, this is not in the text, but I find it
online. (We'll need it a couple more times in the near future.) Acceleration is obtained by
methods similar to those used above for polar coordinates (but much more complicated) :
The r and φ components of this will tell us about the normal forces N that are usually of less
interest. The θ component gives us a differential equation for the motion along the hoop:
Fθ = −mg sin θ = maθ = m{r θ&& + 2 θ& r& − r cosθ sin θ φ& 2 }
We recall r = R; dr/dt = 0, dφ/dt = Ω, d2φ/dt2 = 0, and conclude:
θ&& = cosθ sin θ Ω2 − (g / R)sin θ
a differential equation for θ(t). ( There are other arguably more elegant ways to derive this
governing differential equation for θ; we will see some of them later in the course. )
--How to solve it?
We notice that there are potential points of equilibrium at which θ&& is zero. Two such are
at θ = 0 (the bottom) and θ = π (the top) .
32
cosθ = (g / RΩ2 )
Another would be θ such that
which has a root only if the hoop is
2
spinning fast enough: Ω > g / R . This makes sense: if it is spinning fast enough centrifugal
force might drive it out to θ = arcos (g/RΩ2)
We also notice that the differential equation is of the form "case d" examined earlier in
which acceleration is some specified function of position. Recall that that problem permitted us
to understand the dynamics in terms of a constant energy. Towards that end let us write
θ&& = cosθ sin θ Ω2 − (g / R)sin θ as
θ&& = −dU(θ ) / dθ
where
Ω2 2
U(θ ) ≡ −
sin θ − (g / R)cosθ
2
We have defined a quantity U(θ) that plays a
mathematical role like a Potential Energy did in
case(d) where m&&
x = F(x) = −dU(x) / dx . It is not
actually potential energy…. but it is useful in the
same way
We now derive an expression that plays a role like
conservation of energy. We start with
θ&& = −dU(θ ) / dθ and multiply by dθ/dt:
θ&θ&& = −θ&dU(θ ) / dθ
d 1 &2
d
=>
θ
=
−
U(θ )
dt 2
dt
=> 12 θ& 2 = −U(θ ) + const
or, defining an effective Energy E…
1 &2
1
θ + U(θ ) = E = const = θ&o2 + U(θ o )
2
2
2
2
The plot sketches U(θ) for the case Ω < g / R (solid curve) and Ω > g / R ( dashed curve).
2
Our standard arguments then establish that, if Ω < g / R , there is one stable equilibrium at θ= 0
33
near which the bead will oscillate periodically, and an unstable equilibrium at the top.
And if
2
Ω > g / R there is one stable equilibrium at θ = arcos (g/RΩ2), near which the bead will oscillate
periodically. ( and unstable equilibria at the bottom and the top.)
----------------------Now we return to 1-d and will turn our attention to a case in which we allow the mass to vary with
time.
Time-Varying Mass: Rocket Motion
We’ll begin with the simplest case of rocket motion in free space, with no external force on the
rocket.
Consider a rocket moving in free space with mass M and speed v:
It has momentum Mv.
An infinitesimal amount of time dt later, the rocket has ejected a piece
of burning fuel of mass dm, at a speed relative to the rocket of u. How fast, v+ dv, is the rocket
going then?
The key to this is to note that, because there are no external forces, the total momentum of the
system (rocket+exhaust) is a constant. It is Mv before the ejection and it is
( M-dm)(v+dv) + dm (v-u)
after the ejection. The momentum of the rocket after the ejection has been written as its mass now
( M-dm) times its new velocity v+ dv. The velocity of the ejected fuel is (v-u) to the right, so its
momentum is dm(v-u).
You may object that the speed of the ejected fuel is better estimated as (v + dv/2 - u ) which is
what you get if you approximate the speed of the rocket when the fuel was ejected as its speed at
the midpoint of the ejection process: v + dv/2. It transpires that, in the limit dt → infinitesimal,
34
this makes no difference. ( Try it !)
We invoke conservation of momentum and set the above expression equal to Mv. Multiplying out
the parentheses, we find
Mv = Mv – v dm + M dv – dm dv + vdm – u dm
The terms in Mv cancel. The terms in v dm cancel also. This leaves
0 = [ + M dv – u dm]
– dm dv
Finally, we drop the second order differential term dm dv as vanishing in the limit dt→ 0. This
leaves the differential equation: ( we use dM = -dm )
dv = u (dm/M) = -u dM / M = −u d ln M
( a division by dt may make this more intelligible; one finds that the acceleration of the rocket is
u times rate of mass ejection dm/dt divided by the current mass. )
The speed of the rocket is then given as a function of its diminishing mass M
∫ dv = − u ∫ d ln M
v = vo − u ln(M / M o )
It is remarkable that to derive this result we did not have to know the forces that were acting of the
rocket; it was sufficient to invoke Newton's law of action and reaction ( and to know the exhaust
velocity.)
By way of illustration, imagine a rocket in free space with an initial speed of zero and an initial
mass that is 90% fuel. Its speed after burning all the fuel is – u ln (0.1 ) = 2.3 u. Final speed
increases only logarithmically with fuel load. If one wishes high speeds, say to explore the outer
solar system, one can use LOTS of fuel, or be satisfied with a small payload, or engineer a new
kind of rocket with higher exhaust velocity (or sometimes you can be clever and rob energy from
passing planets)
35
Phys 325 mini quiz # 4 Thursday January 29, 2015
__________________
name
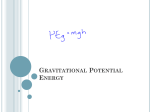
A bead slides out along a frictionless rod of length R that is fixed at point O and rotating in a
horizontal plane at a constant rate ω. Here is a view looking down on the system:
The bead is found to fly off at the instant (i.e when r = R) when φ = 90 degrees. Let us presume
you have solved the ODE we discussed earlier and found that just before it slid off, dr/dt happened
to be 2 ωR.
• What is the bead's trajectory after it flies off?
Hint: What is the bead's velocity vector just before it flies off?
A few sample trajectories are illustrated, one of which might or might not be the right one. …
Neglect gravity because motion is in a horizontal plane .
Answer: The bead a straight line after flying off – it
continues with the same velocity it had just before flying
off. Newton's first law says it continues on in a straight
line. As it flies off there are no forces on it, so it
continues with a constant velocity…
It follows the bold arrow in the figure at an angle from
the vertical of the arctan (1/2). Because the instant it
flies off, the bead is moving with velocity
r
v = r&rˆ + rφ&φˆ = (2Rω )rˆ + (Rω )φˆ
i.e twice as fast in the outward direction as in the
tangential direction.
Make sure you understand this; I am tempted to
something like it on an exam.
36