Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Evolving Winning Controllers
for Virtual Race Cars
Yonatan Shichel & Moshe Sipper
Outline
•
Introduction
– Artificial Intelligence
– AI in games
•
•
Robocode: Java-based tank-battle simulator
RARS: Robot Auto Racing Simulator
– Evolutionary Computation
•
•
•
•
GP-RARS: evolution of winning controllers for virtual race cars
–
–
–
–
–
–
•
Key concepts in evolution
Genetic Algorithms (GA)
Genetic Programming (GP)
Game description
Previous work
Evolutionary environment setup & calibration
Experiments and Results
Discussion
Result Analysis
Concluding Remarks
Introduction
Artificial Intelligence (AI)
Definition (Russell & Norvig, 2003):
“systems that
[act/think]
[like humans/rationally]”
Artificial Intelligence (AI)
Definition (Russell & Norvig, 2003):
“systems that
[act/think]
[like humans/rationally]”
Artificial Intelligence (AI)
Definition (Russell & Norvig, 2003):
“systems that
[act/think]
[like humans/rationally]”
Artificial Intelligence (AI)
Definition (Russell & Norvig, 2003):
“systems that
[act/think]
[like humans/rationally]”
Artificial Intelligence (AI)
Definition (Russell & Norvig, 2003):
“systems that
[act/think]
[like humans/rationally]”
AI in Games
•
•
•
•
•
•
games are natural candidates for AI
games provide a variety of challenges
games allow exploration of real-world realms
games allow comparison to human behavior
games can be rewarding to master
games are fun!
Robocode
Robocode
•
•
•
•
tank-battle simulation
Java-based, open-source programming game
simplistic physical model
active gamer community
– extensive online robot library
– ongoing tournaments
RARS: Robot Auto Racing Simulator
RARS: Robot Auto Racing Simulator
RARS: Robot Auto Racing Simulator
RARS: Robot Auto Racing Simulator
RARS: Robot Auto Racing Simulator
•
•
•
•
car-race simulation
C++-based, open-source programming game
sophisticated physical model
inactive gamer community
– limited online robot library
– tournaments held between 1995 and 2003
Evolutionary Computation
“a family of algorithmic approaches
aimed at finding optimal solutions to
search problems of high complexity”
Key concepts in Evolution
The Origin of Species (Darwin, 1859):
• a population is composed of many individuals
• individuals differ in characteristics, which are
inheritable by means of sexual reproduction
• environment consists of limited resources, leading
to a struggle for survival
Key concepts in Evolution
The Origin of Species (Darwin, 1859):
• fitter individuals are more likely to survive and
reproduce, passing their characteristics to their
offspring
• as time passes, populations slowly adapt to their
surrounding environment
Genetic Algorithms (GA)
Inspired by Darwin’s evolutionary principles:
• a fixed-size population is composed of many
solution instances for the problem at hand
• solutions are encoded in genomes
• a fitness function determines how fit each
individual is
• population is re-populated on each generation
• fitter individuals have higher probabilities to be
selected to next generation
Genetic Algorithms (GA)
• genetic operators – crossover and mutation – are
applied on selected individuals for the creation of
new individuals
• process is repeated for many generations
Genetic Algorithms (GA)
A schematic flow of a basic GA:
g=0
initialize population P0
evaluate P0 //assign fitness values to individuals
while (termination condition not met) do
g=g+1;
select Pg from Pg-1
crossover Pg
mutate Pg
evaluate Pg
end while
Genetic Algorithms (GA)
GA customization:
•
•
•
•
•
•
•
genome representation
fitness measure
selection method
crossover method
mutation method
termination condition
initial population creation
Genetic Programming (GP)
“an evolutionary computation approach
aimed at the creation of computer programs
rather than static solutions”
Genetic Programming (GP)
• individual’s genome is composed of LISP
expressions
Genetic Programming (GP)
example of LISP expression:
+
*
x
1
x
(+ (* x x) 1) ==> x2+1
Genetic Programming (GP)
• individual’s genome is composed of LISP
expressions
• LISP expressions are composed of functions
and terminals
Genetic Programming (GP)
functions:
terminals:
{+, *}
{1, x}
+
*
x
1
x
Genetic Programming (GP)
functions:
terminals:
{+, *}
{1, x}
+
*
x
1
x
Genetic Programming (GP)
functions:
terminals:
{+, *}
{1, x}
+
*
x
1
x
Genetic Programming (GP)
functions:
terminals:
{+, *}
{1, x}
+
*
x
1
x
Genetic Programming (GP)
• individual’s genome is composed of LISP
expressions
• LISP expressions are composed of functions
and terminals
• LISP expressions evaluate to numeric
values, hence representing functions
Genetic Programming (GP)
evaluation of LISP expression:
6
-3
-2
-1
5
x
(+ (* x x) 1)
4
-2
5
3
-1
2
2
0
1
1
1
2
0
2
5
0
1
2
3
Genetic Programming (GP)
• individual’s genome is composed of LISP
expressions
• LISP expressions are composed of functions
and terminals
• LISP expressions evaluate to numeric
values, hence representing functions
• genetic operators are defined to operate on
(and return) LISP expressions
Genetic Programming (GP)
subtree substitution crossover:
+
*
x
1
x
1
*
1
+
x
(+ (* x x) 1)
x2+1
1
(- 1 (* 1 (+ x 1)))
-x
Genetic Programming (GP)
subtree substitution crossover:
+
*
x
1
x
1
*
1
+
x
(+ (* x x) 1)
x2+1
1
(- 1 (* 1 (+ x 1)))
-x
Genetic Programming (GP)
subtree substitution crossover:
+
*
x
1
x
1
*
1
+
x
(+ (* x x) 1)
x2+1
1
(- 1 (* 1 (+ x 1)))
-x
Genetic Programming (GP)
subtree substitution crossover:
+
1
1
*
1
+
x
1
(- 1 (* 1 (+ x 1)))
-x
Genetic Programming (GP)
subtree substitution crossover:
+
1
1
Genetic Programming (GP)
subtree substitution crossover:
+
*
1
1
+
x
1
(+ (* 1 (+ x 1)) 1)
x+2
1
Genetic Programming (GP)
subtree substitution crossover:
+
*
1
1
*
x
+
x
1
x
1
(+ (* 1 (+ x 1)) 1)
x+2
(- 1 (* x x))
1-x2
Genetic Programming (GP)
random subtree growth mutation:
+
*
x
1
x
(+ (* x x) 1)
x2+1
Genetic Programming (GP)
random subtree growth mutation:
+
*
x
1
x
(+ (* x x) 1)
x2+1
Genetic Programming (GP)
random subtree growth mutation:
+
*
x
1
Genetic Programming (GP)
random subtree growth mutation:
+
*
x
1
-
1
1
(+ (* x (- 1 1)) 1)
1
Genetic Programming (GP)
A schematic flow of a basic GP:
g=0
initialize population P0
evaluate P0 //assign fitness values to individuals
while (termination condition not met) do
g=g+1;
while (Pg is not full) do
OP = choose a genetic operator
select individual or individuals from Pg-1
according to OP's inputs
apply OP on selected individuals
add the resulting individuals to Pg
end while
evaluate Pg
end while
GP-RARS
evolution of winning controllers
for virtual race cars
Basic Rules
• one or more cars drive on a track for given
number of laps
• cars are damaged when colliding or driving
off track
• car may be disabled and disqualified if its
damage exceeds a certain level
• the winner is the driver that finishes first
Game Variants
•
•
•
•
•
number of cars: one, two, multiple
number of tracks: one, multiple
race length: short, long
controller program: generic, specialized
driver class: reactive (c2), optimal-path (c1)
Game Variants
•
•
•
•
•
number of cars: one, two, multiple
number of tracks: one, multiple
race length: short, long
controller program: generic, specialized
driver class: reactive (c2), optimal-path (c1)
Game Variants
•
•
•
•
•
number of cars: one, two, multiple
number of tracks: one, multiple
race length: short, long
controller program: generic, specialized
driver class: reactive (c2), optimal-path (c1)
Game Variants
•
•
•
•
•
number of cars: one, two, multiple
number of tracks: one, multiple
race length: short, long
controller program: generic, specialized
driver class: reactive (c2), optimal-path (c1)
Game Variants
•
•
•
•
•
number of cars: one, two, multiple
number of tracks: one, multiple
race length: short, long
controller program: generic, specialized
driver class: reactive (c2), optimal-path (c1)
Game Variants
•
•
•
•
•
number of cars: one, two, multiple
number of tracks: one, multiple
race length: short, long
controller program: generic, specialized
driver class: reactive (c2), optimal-path (c1)
Controlling the Car
• movement:
• steering:
• fuel & damage:
desired speed variable
wheel angle variable
pit stop request flag
Car Sensors
situation variables:
•
•
•
•
•
•
current speed, drift speed and heading
current track segment ID
position on current track segment
distances from left and right road shoulders
distance to next track segment
radii and lengths of current and next track segments
additional data:
• complete track layout
• nearby cars information
Car Sensors
...some basic RARS situation variables:
The Challenge
PEAS system (Russell & Norvig, 2003):
•
•
•
•
Performance measure
Environment
Actuators
Sensors
The Challenge
PEAS system (Russell & Norvig, 2003):
•
•
•
•
Performance measure
Environment
Actuators
Sensors
The Challenge
PEAS system (Russell & Norvig, 2003):
•
•
•
•
Performance measure
Environment
Actuators
Sensors
The Challenge
is the environment...
...observable?
...deterministic?
...episodic?
...static?
...discrete?
...single agent?
RARS
GP-RARS
The Challenge
is the environment...
RARS
GP-RARS
...observable?
fully
fully
...deterministic?
...episodic?
...static?
...discrete?
...single agent?
The Challenge
is the environment...
RARS
GP-RARS
...observable?
fully
fully
...deterministic?
partially
partially
...episodic?
...static?
...discrete?
...single agent?
The Challenge
is the environment...
RARS
GP-RARS
...observable?
fully
fully
...deterministic?
partially
partially
...episodic?
no
no
...static?
...discrete?
...single agent?
The Challenge
is the environment...
RARS
GP-RARS
...observable?
fully
fully
...deterministic?
partially
partially
...episodic?
no
no
...static?
either
static
...discrete?
...single agent?
static indicates whether the environment changes with or without the intervention of the active
agent. In the basic RARS game it can be non-static if more than one agent is active; GP-RARS is
single-car and thus fully static.
The Challenge
is the environment...
RARS
GP-RARS
...observable?
fully
fully
...deterministic?
partially
partially
...episodic?
no
no
...static?
either
static
...discrete?
continuous
continuous
...single agent?
The Challenge
is the environment...
RARS
GP-RARS
...observable?
fully
fully
...deterministic?
partially
partially
...episodic?
no
no
...static?
either
static
...discrete?
continuous
continuous
...single agent?
single OR multiple
single
The Challenge
PEAS system (Russell & Norvig, 2003):
•
•
•
•
Performance measure
Environment
Actuators
Sensors
The Challenge
PEAS system (Russell & Norvig, 2003):
•
•
•
•
Performance measure
Environment
Actuators
Sensors
Previous Work
• planning approaches:
– Genetic Algorithms (Eleveld, Sáez)
– A* search (Pajala)
• reactive approaches:
– Decision Trees (Wang)
– Action Tables (Cleland)
– Artificial Neural Networks (Ng, Pyeatt, Coulum)
– Evolving Neural Networks (Stanley)
Previous Work
• planning approaches:
– Genetic Algorithms (Eleveld, Sáez)
– A* search (Pajala)
• reactive approaches:
– Decision Trees (Wang)
– Action Tables (Cleland)
– Artificial Neural Networks (Ng, Pyeatt, Coulum)
– Evolving Neural Networks (Stanley)
Evolutionary Setup & Calibration
•
•
•
•
•
•
•
genome representation
fitness measure
selection method
crossover method
mutation method
termination condition
initial population creation
Evolutionary Setup & Calibration
•
•
•
•
•
•
•
genome representation
fitness measure
selection method
crossover method
mutation method
termination condition
initial population creation
Genome Representation
• each individual is composed of two trees:
– steering tree
– throttling tree
• trees evaluate to numeric values, which are
truncated to fit game-world restrictions
• trees are defined using an extensive set of
functions and terminals, both simple and
complex
Genome Representation
• terminal set (simple):
{cur-rad, nex-rad, to-end, nex-len, v, vn, to-lft,
to-rgt, track-width, random-constant, 0, 1}
• terminal set (complex):
{a, a-angle, off-center, inner-wall, outer-wall,
closest-wall}
• function set:
{add(2), sub(2), mul(2), div(2), abs(1), neg(1), tan(1),
if-greater(4), if-positive(3), if-cur-straight(2),
if-nex-straight(2)}
Genome Representation
• terminal set (simple):
{cur-rad, nex-rad, to-end, nex-len, v, vn, to-lft,
to-rgt, track-width, random-constant, 0, 1}
• terminal set (complex):
{a, a-angle, off-center, inner-wall, outer-wall,
closest-wall}
• function set:
{add(2), sub(2), mul(2), div(2), abs(1), neg(1), tan(1),
if-greater(4), if-positive(3), if-cur-straight(2),
if-nex-straight(2)}
blue terminals and functions are the ones chosen after a calibration process
Evolutionary Setup & Calibration
•
•
•
•
•
•
•
genome representation
fitness measure
selection method
crossover method
mutation method
termination condition
initial population creation
Fitness Measure
• fitness evaluation performed on a single-lap,
single-car race on one track: sepang
• track believed to exhibit various track
features
• two fitness measures were used:
– race distance
– modified race time
Evolutionary Setup & Calibration
•
•
•
•
•
•
•
genome representation
fitness measure
selection method
crossover method
mutation method
termination condition
initial population creation
Selection Method
• several methods examined for a 250individual population:
– tournament of k, with k={2,3,4,5,6,7}
– fitness proportionate selection
– square-fitness proportionate selection
Selection Method
• several methods examined for a 250individual population:
– tournament of k, with k={2,3,4,5,6,7}
– fitness proportionate selection
– square-fitness proportionate selection
Evolutionary Setup & Calibration
•
•
•
•
•
•
•
genome representation
fitness measure
selection method
crossover method
mutation method
termination condition
initial population creation
Crossover & Mutation
• crossover: subtree substitution
• mutation: random subtree growth
• probabilities:
– 40% reproduction
– 50% crossover
– 10% mutation
• 5% random constant mutation
• 5% structural (subtree) mutation
Evolutionary Setup & Calibration
•
•
•
•
•
•
•
genome representation
fitness measure
selection method
crossover method
mutation method
termination condition
initial population creation
Initialization & Termination
• initial population creation:
– Koza’s ‘ramped-half-and-half’ method: for each
k = {4,5,6,7,8}:
• 10% of the trees grown to a depth up to k
• 10% of the trees grown to a depth of exactly k
• termination condition:
– evolution stops after 255 generations
Experiments & Results
• several evolutionary runs were made
• two best runs were taken, and best driver of
last generation was extracted from each
• driver was then tested for 10 single-lap,
single-car races
Experiments & Results
best run, race-distance fitness:
GP-Single-1
160.0 ± 0.4 seconds
Experiments & Results
best run, modified-race-time fitness:
GP-Single-2
160.9 ± 0.3 seconds
...but how do they drive?
Result Comparison
• comparison to human-crafted drivers
– on the training track
– on ‘unseen’ tracks
• comparison to machine-crafted drivers
Result Comparison
• comparison to human-crafted drivers
– on the training track
– on ‘unseen’ tracks
• comparison to machine-crafted drivers
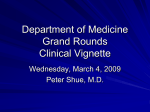
Result Comparison
single-car, single-lap race on sepang
#
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
Driver
Dodger13
K1999
K2001
SmoothB4
Bulle2
Sparky5
SmoothB3
Felix16
SmoothB2
GPSingle1
GPSingle2
Vector
WappuCar
Apex8
Djoefe
Ali2
Mafanja
SBv1r4
Burns
Eagle
Bulle
Magic
JR001
Class
1
1
1
1
1
1
1
1
1
2
2
2
2
2
2
2
2
2
2
2
2
Lap Time (sec.)
146.3 ± 0.1
146.6 ± 0.1
147.1 ± 0.1
148.3 ± 0.1
150.4 ± 0.1
150.4 ± 0.1
153.3 ± 0.1
153.6 ± 0.1
156.5 ± 0.1
160.0 ± 0.4
160.9 ± 0.3
160.1 ± 0.1
161.7 ± 0.1
162.5 ± 0.2
163.7 ± 0.1
164.1 ± 0.1
164.4 ± 0.3
165.7 ± 0.1
168.4 ± 5.7
169.3 ± 0.6
169.5 ± 0.2
174.0 ± 0.1
178.5 ± 0.1
Result Comparison
• comparison to human-crafted drivers
– on the training track
– on ‘unseen’ tracks
• comparison to machine-crafted drivers
Result Comparison
Aug. 2004 season results (16 tracks)
#
Driver
1st
2nd
3rd
total
1
Vector
6
3
2
11
2
Eagle
3
2
1
6
3
GPSingle2
2
3
4
9
4
GPSingle1
2
2
2
6
5
SBv1r4
1
1
2
4
6
Bulle
1
7
Mafanja
2
8
Magic
2
2
9
WappuCar
1
2
10
Djoefe
2
2
11
Burns
1
1
12
Ali2
13
Apex8
14
JR001
1
1
2
4
Result Comparison
• comparison to human-crafted drivers
– on the training track
– on ‘unseen’ tracks
• comparison to machine-crafted drivers
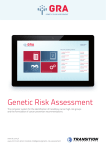
Result Comparison
Previous Works Results
Author
Reported Time (sec.)
GP-Single-1
GP-Single-2
v01
37.8 ± 0.1
38.1 ± 1.7
34.9 ± 0.1
suzuka
149.7 ± 0.1
177.1 ± 5.2
167.5 ± 0.3
race7
85.7 ± 0.2
61.9 ± 0.6
63.3 ± 0.4
v03
59.4
55.3 ± 0.5
49.3 ± 0.1
oval
33.0
31.0 ± 0.1
30.8 ± 0.1
complex
209.0
196.2 ± 6.0
204.6 ± 1.3
Coulum
clkwis
38.0
37.8 ± 0.1
36.4 ± 0.1
(ANN)
Cleland
v01
37.4
38.1 ± 1.7
34.9 ± 0.1
(Action Tables)
Stanley et al.
clkwis
37.6 / 37.9
37.8 ± 0.1
36.4 ± 0.1
Eleveld
(GA)
Ng et al.
(ANN)
(Evolving ANN)
Track
Conclusions
• GP-Drivers rank higher than any humancrafted driver in their class when racing on
their training track
• GP-Drivers rank among the top humancrafted drivers in their class when racing on
new, unseen tracks
• GP-Drivers perform better than any
machine-crafted driver developed by past
RARS researchers
Discussion
Performance Analysis
GPSingle2 on sepang (159.9 sec)
Performance Analysis
Dodger13 on sepang (146.5 sec)
Performance Analysis
GPSingle2 on clkwis
Genome Representation
• terminal set (simple):
{cur-rad, nex-rad, to-end, nex-len, v, vn, to-lft,
to-rgt, track-width, random-constant, 0, 1}
• terminal set (complex):
{a, a-angle, off-center, inner-wall, outer-wall,
closest-wall}
• function set:
{add(2), sub(2), mul(2), div(2), abs(1), neg(1), tan(1),
if-greater(4), if-positive(3), if-cur-straight(2),
if-nex-straight(2)}
blue terminals and functions are the ones chosen after a calibration process
Genome Representation
• terminal set (simple):
{cur-rad, nex-rad, to-end, nex-len, v, vn, to-lft,
to-rgt, track-width, random-constant, 0, 1}
• terminal set (complex):
{a, a-angle, off-center, inner-wall, outer-wall,
closest-wall}
• function set:
{add(2), sub(2), mul(2), div(2), abs(1), neg(1), tan(1),
if-greater(4), if-positive(3), if-cur-straight(2),
if-nex-straight(2)}
blue terminals and functions are the ones “chosen” by evolution (in best-of-run)
Genetic Analysis
GP-Single-2, Steering
(% (% (% (% (ifg 0.70230484 a α (* n -0.9850136))
(- a (neg a))) (- (% 1.0 (% v a)) (neg a))) (- ((* n (neg n)) (neg a)) (neg a))) (- (% 1.0 (% v a))
(neg (% (% 1.0 (% v a)) (% v a)))))
Genetic Analysis
GP-Single-2, Steering
(% (% (% (% (ifg 0.70230484 a α (* n -0.9850136))
(- a (neg a))) (- (% 1.0 (% v a)) (neg a))) (- ((* n (neg n)) (neg a)) (neg a))) (- (% 1.0 (% v a))
(neg (% (% 1.0 (% v a)) (% v a)))))
Genetic Analysis
GP-Single-2, Steering
(% (% (% (% (ifg 0.70230484 a α (* n -0.9850136))
(- a (neg a))) ((% a v)
(neg a))) (- ((* n (neg n)) (neg a)) (neg a))) ((% a v)
(neg (%
(% a v)
(% v a)))))
Genetic Analysis
GP-Single-2, Steering
(% (% (% (% (ifg 0.70230484 a α (* n -0.9850136))
(- a (neg a))) ((% a v)
(neg a))) (- ((* n (neg n)) (neg a)) (neg a))) ((% a v)
(neg (%
(% a v)
(% v a)))))
Genetic Analysis
GP-Single-2, Steering
(% (% (% (% (ifg 0.70230484 a α (* n -0.9850136))
(- a (neg a))) ((% a v)
(neg a))) (- ((* n (neg n)) (neg a)) (neg a))) ((% a v)
(neg (%
(% a v)
(% v a)))))
Genetic Analysis
GP-Single-2, Steering
(% (% (% (% (ifg 0.70230484 a α (* n -0.9850136))
(+ a
a
)) (+
(% a v)
a
)) (- ((neg (* n n)) (neg a)) (neg a))) ((% a v)
(neg (*
(% a v)
(% a v)))))
Genetic Analysis
GP-Single-2, Steering
(% (% (% (% (ifg 0.70230484 a α (* n -0.9850136))
(+ a
a
)) (+
(% a v)
a
)) (- ((neg (* n n)) (neg a)) (neg a))) ((% a v)
(neg (*
(% a v)
(% a v)))))
Genetic Analysis
GP-Single-2, Steering
...
Genetic Analysis
GP-Single-2, Steering
behavior depends on distance, a, to upcoming curve: when next turn is far
enough, controller slightly adjusts wheel angle to prevent drifting off track;
when approaching a curve, however, controller steers according to relative
curve angle—steep curves will result in extreme wheel angle values.
Genetic Analysis
what’s a/v?
• a – distance to next obstacle
• v – current speed
Genetic Analysis
what’s a/v?
• a – distance to next obstacle
• v – current speed
a/v – time to crash!
Genetic Analysis
GP-Single-2, Throttling
(ifpos (abs (% v a)) (- (% 1.0 (% v a)) (neg (- (* n
(* n -0.86818504)) (neg a)))) (% (neg (- (- (* n
(neg toright)) (neg a)) (neg a))) (- (% 1.0 (% v a))
(neg (% (* n (neg n)) (% v a))))))
Genetic Analysis
GP-Single-2, Throttling
(ifpos (abs (% v a)) (- (% 1.0 (% v a)) (neg (- (* n
(* n -0.86818504)) (neg a)))) (% (neg (- (- (* n
(neg toright)) (neg a)) (neg a))) (- (% 1.0 (% v a))
(neg (% (* n (neg n)) (% v a))))))
Genetic Analysis
GP-Single-2, Throttling
(- (% 1.0 (% v a)) (neg (- (* n
(* n -0.86818504)) (neg a))))
Genetic Analysis
GP-Single-2, Throttling
Future Work
• apply GP to other RARS variants
– multiple-car scenarios
– long (endurance) races
• use GA to plan optimal paths
• migrate research to TORCS
Bibliography
•
•
•
•
•
•
•
Russell, Stuart and Norvig, Peter. Artificial Intelligence: A Modern Approach. 2nd
edition. s.l. : Prentice Hall, 2003. ISBN 0-13-790395-2
Darwin, Charles. On the Origin of Species: By Means of Natural Selection or the
Preservation of Favoured Races in the Struggle for Life. London : John Murray, 1859. ISBN
0-486-45006-6
GP-Robocode: Using Genetic Programming to Evolve Robocode Players. Shichel,
Yehonatan, Ziserman, Eran and Sipper, Moshe. s.l. : Springer, 2005. 8th European
Conference on Genetic Programming. pp. 143-154
Eleveld, Doug. [Online] http://rars.sourceforge.net/selection/douge1.txt
Pajala, Jussi. [Online] http://rars.sourceforge.net/selection/jussi.html
Wang, Zhijin. Car Simulation Using Reinforcement Learning. Computer Science
Department, University of British Columbia. Vancouver, B.C., Canada : s.n., 2003
MoNiF: a modular neuro-fuzzy controller for race car navigation. Ng, Kim C, et al.
Monterey, CA, USA : s.n., 1997. IEEE International Symposium on Computational
Intelligence in Robotics and Automation. pp. 74-79. ISBN 0-8186-8138-1
Bibliography
•
•
•
•
•
Learning to Race: Experiments with a Simulated Race Car. Pyeatt, Larry D and Howe,
Adele E. Sanibel Island, Florida, USA : s.n., 1998. 11th International Florida Artificial
Intelligence Research Society Conference
Coulom, Rémi. Reinforcement Learning Using Neural Networks, with Applications to
Motor Control. Institut National Polytechnique de Grenoble. 2002. PhD Thesis
Cleland, Ben. Reinforcement Learning for Racecar Control. University of Waikato. 2006.
M.Sc. Thesis
Neuroevolution of an automobile crash warning system. Stanley, Kenneth, et al. 2005.
Genetic And Evolutionary Computation Conference. pp. 1977 - 1984. ISBN 1-59593-0108
Sáez, Yago, et al. Driving Cars by Means of Genetic Algorithms. Parallel Problem Solving
from Nature – PPSN X. s.l. : Springer, 2008, pp. 1101-1110