Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electrical ballast wikipedia , lookup
Power engineering wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Current source wikipedia , lookup
Electric motor wikipedia , lookup
Power inverter wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Schmitt trigger wikipedia , lookup
Electrical substation wikipedia , lookup
History of electric power transmission wikipedia , lookup
Distribution management system wikipedia , lookup
Opto-isolator wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Buck converter wikipedia , lookup
Voltage regulator wikipedia , lookup
Surge protector wikipedia , lookup
Rectiverter wikipedia , lookup
Power electronics wikipedia , lookup
Stepper motor wikipedia , lookup
Stray voltage wikipedia , lookup
Voltage optimisation wikipedia , lookup
Three-phase electric power wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Alternating current wikipedia , lookup
Induction motor wikipedia , lookup
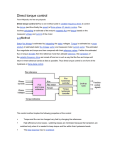
علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان Classical Direct Torque Control (DTC) for Symmetrical Six Phase Induction Motors R. Kianinezhad1 , S. Gh. Seifossadat2 Abstract This paper introduces classical direct torque control (DTC) for six-phase induction machines (SPIM). The machine has two, three-phase windings spatially shifted by 60 electrical degrees with one or two neutrals. SPIM drive has 64 inverter switching states which provide higher possibility in selecting space voltage vectors than three-phase induction machines. We will show that classical DTC for SPIM with two isolated neutrals gives satisfactory results, by selecting space voltage vectors whose amplitude is high enough on plane where their components on z1-z2 and z3-z4 planes give minimum amplitudes. We will show this method suppresses harmonic currents for DTC of SPIM. In the contrary, in the case of SPIM with one common neutral, we will show that it is not possible to use conventional DTC, because of producing high harmonic currents. We will validate our analysis by simulation results. Keyword.: six-phase induction machines; direct torque control. کنترل مستقيم کوپل به روش کالسيک ماشينهای القایی شش فازه 2 سيد قدرت اله سيف السادات،1رضا کيانی نژاد چکيده ( به روش کالسیک برای ماشینهایDTC) در این مقاله کنترل مستقیم کوپل این ماشین دارای دو دسته سیم پیچ سه فازه.القایی شش فازه ارائه می شود درجه06 با نوتر الهای مستقل و یا متصل به هم می باشد که به فاصله 06 درایوهای شش فازه دارای.الکتریکی از یکدیگر در استاتور قرار می گیرند حالت کلید زنی می باشند که نسبت به درایوهای سه فازه که دارای هشت حالت قابلیت انتخاب بردارهای ولتاژ بیشتری در اختیار ما قرار می،می باشند با انتخاب بردارهای: کالسیکDTC در این مقاله نشان می دهیم که روش.دهد Z1-Z2 ،Z3-Z4 (که دارای مولفه های کوچکی در صفحات - ولتاژ بزرگ در صفحه نتایج خوبی،می باشند) برای ماشینهای القایی شش فازه با نوتر الهای مجزا در این مقاله نشان داده خواهد شد که روش کنترلی به کار.ارائه می دهد هارمونیک های نا مطلوب جریان را در ماشینهای القایی شش فازه با ،رفته بر خالف نتایجی که این روش برای ماشینهای.نوتر الهای مجزا حذف می کند در ماشینهای القایی با،القایی شش فازه با نوتر الهای مجزا ارائه می کند هارمونیک های نا مطلوب بسیاری را تولید می کند به نحوی،نوتر الهای مشترک ارزیابی نتایج.که کاربرد آن را برای اینگونه ماشینها غیر ممکن می سازد ارائه شده در این مقاله با استفاده از شبیه سازی کامپیوتری صورت گرفته .است 1-Assistant Professor, Electrical Engineering Department., . استادیار گروه برق دانشکده مهندسی دانشگاه شهید چمران اهواز-1 Shahid Chamran University of Ahvaz. 2-Assistant Professor, Electrical Engineering Department., Shahid Chamran University of Ahvaz. استادیار گروه برق دانشکده مهندسی دانشگاه شهید چمران اهواز-2 [email protected] [email protected] سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان 1-INTRODUCTION In the industrial applications that high reliability is demanded, multi-phase induction machine (IM) instead of traditional three-phase induction machine is used. In the multi-phase drive systems, the electric machine has more than three phases in the stator and the same numbers of inverter legs are in the inverter side. The advantages of multi-phase drive systems over conventional three-phase drives are: total rating of system is multiplied, the torque pulsations will be smoothed, the rotor harmonic losses as well as the harmonics content of the DC link current will be reduced and the loss of one machine phase, does not prevent the machine working, so improving the system reliability. The most common multi-phase machine drive structure is the six-phase induction machine (SPIM), which has two sets of three-phase winding, spatially phase shifted by 30 or 60 electrical degrees with two isolated or one common neutral. For simplicity we show the configurations with 60 electrical degrees and two isolated neutrals by SPIM-60-2n, and the configuration with 60 electrical degrees and one common neutral by SPIM-60-1n It is clear that one way to deal with SPIM drives is to extend control techniques used for three-phase induction machines in order to improve reliability and fault-tolerance. During the some last years, the literature related to control of SPIM drives has covered: -Machine modelling in the normal and open phase fault conditions; [1][2]. -Steady state analyse using VSI and CSI [3]. -Vector control in mode normal and fault tolerant [4]-[6] - PWM techniques [7]-[9]. The rotor field oriented control uses current control loops and coordinate transformation to impose the flux and torque. DTC provides a fast torque response and also is robust against machine parameter variations, without coordinate transformation [10]. DTC controls stator flux and electric torque by means of hysteresis comparators of electric torque and stator flux. The only factor that must be adjusted is the amplitude of the hysteresis band. In the three-phase IM drive one of the six non-zero space voltage vectors and two zero space voltage vectors are applied to the motor. The number of available space voltage vectors, determines the presence of ripple in the stator current and torque. In comparison with three phase IM drives, SPIM drives Fig.1, have 2 6 64 space voltage vectors [11], so SPIM drives have more voltage vectors than three-phase IM that can improve ripple content of stator current and torque. Some papers concern DTC for SPIM with 30 electrical degrees between two threephase windings [11]-[12], this paper concerns DTC for SPIM with 60 electrical degrees between two three-phase windings, with one common or two isolated neutrals . This paper is organized in seven sections. The model of SPIM is described in the next section. The third section presents the space voltage vectors of SPIM. In section four application of DTC to SPIM will be introduced. سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان γ γ Fig 1-a: SPIM with two isolated neutrals Fig 1-b: SPIM with one common neutral The simulation results will be shown in the fifth section. Finally some conclusions and perspectives will be discussed in the sixth section. 2-MODEL OF SPIM The basic equations of SPIM have been expressed briefly in [1]. The voltage equations of the SPIM are as follow: for stator circuit we can write: α-β subspace: The stator and rotor voltage equation of this 59 ▓ 2 subsystem is: Vs Rs . is p(Lss . is Lsr . ir ) The stator and rotor flux linkages of this subspace are: Vr Rr ir p(Lrr . ir Lrs . is ) (2) The SPIM can be decomposed into three two-dimensional orthogonal subspaces, α-β, z1-z2, and z3-z4, by the following transformation: 1 2 3 2 1 2 3 2 cos(2/3 ) 0 1 0 1 1 0 1 0 1 cos( ) 0 sin( ) 1 cos( - ) 0 sin( - ) 1 0 sin(2 /3 ) cos(/3 - ) sin( /3 - ) (4) (1) and for rotor circuit we have: 1 T 3 di s di r v s R s .i s Ls dt M dt di s di r v R s .i s Ls M s dt dt di di r 0 R .i L r .Lr .i r M s r .M .i s r r r dt dt di di s r 0 R .i L r Lr i r r .M .i s M r r r dt dt 1 2 3 2 1 2 3 2 cos(4/3 ) sin(4 /3 ) cos(5/3 ) sin(5 /3 ) 0 1 (3) In this matrix, γ is the electrical angle between the two, three-phase windings, which is 30 or 60 electrical degrees. By applying the transformation (3) to the voltage equations (1) and (2), we can obtain decoupled models for SPIM in the following different subspaces are described: s Ls is Mir r Mis Lr ir (5) with: M = 3 Lms , Ls = Lls + M , Lr = Llr + M z1-z2 subspace: disz1 dt disz 2 Rs .isz 2 Lls dt v sz1 Rs .isz1 Lls (6) v sz 2 (7) z3-z4 subspace: disz3 (8) dt di v sz 4 Rs .isz 4 Lls sz 4 (9) dt As it can be seen from these three subsystems, the electromechanical energy conversion takes place in the α-β subsystem, and the other subsystems do not contribute in the energy conversion. The z1-z2 and z3vsz3 Rs .isz3 Lls 58 ▓ 3 سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان z4 subsystems are only producing losses, so they should be controlled to be as small as possible. It can be concluded that analysing the SPIM is performed by help of the α-β subspace. The mechanical equation is the following: d J m Tm T L (10) dt in which Jm is the inertia coefficient, and: (11) Tm p s * i s is the torque generated by the motor. TL is the load torque; p is the number of pair of poles. 3-SPACE VOLTAGE VECTORS IN SPIM Based on the state of the upper or lower switches of the inverter, each phase switching functions, which are called Sa1, Sb1, Sc1, Sa2, Sb2, and Sc2 can take either 1 or 0 value. If the upper switch is “on” then the switching function assumes a value of “1”, else “0”. Therefore, the phase voltages with respect to the mid point of the inverter source are: Va1o ( 2* Sa1 -1 )*E/ 2 Vb1o ( 2* Sb1 -1 )*E/ 2 Vc1o ( 2* Sc1 -1 )*E/ 2 Va2o ( 2* Sa 2 -1 )*E/ 2 (12) Vb2o ( 2* Sb2 -1 )*E/ 2 Vc2o ( 2* Sc2 -1 )*E/ 2 In the SPIM-60-2n configuration, the phase voltages with respect to their neutrals will be written as follows: Va1n 1/ 3*[ 2*Va1o-Vb1o-Vc1o] Vb1n 1 / 3*[ 2*Vb1o-Va1o-Vc1o] Vc1n 1/ 3*[ 2*Vc1o-Vb1o-Va1o] Va 2n 1/ 3*[ 2*Va 2o-Vb2o-Vc 2o] Vb2n 1/ 3*[ 2*Vb2o-Va 2o-Vc 2o] Vc2n 1/ 3*[ 2*Vc2o-Vb2o-Va 2o] (13) The phase voltages in the SPIM-60-1n configuration are: Va1n 1/ 6*[ 5*Va1o-Vb1o-Vc1o-Va 2o-Vb2o-Vc 2o] Vb1n 1/ 6*[- Va1o 5*Vb1o-Vc1o-Va 2o-Vb2o-Vc 2o] Vc1n 1/ 6*[- Va1o-Vb1o 5*Vc1o-Va 2o-Vb2o-Vc 2o] Va2n 1/ 6*[- Va1o-Vb1o-Vc1o 5*Va2o-Vb2o-Vc 2o] Vb2n 1/ 6*[- Va1o-Vb1o-Vc1o-Va 2o 5*Vb2o-Vc 2o] Vc2n 1/ 6*[- Va1o-Vb1o-Vc1o-Va 2o-Vb2o 5*Vc2o] (14) Applying transformation matrix (3) yields six-phase voltages of three orthogonal subsystems. Using α-β subspace and taking into account stator flux linkage equation (5), we can write: d v s rs is s dt d v r i s s s s dt (15) The stator flux linkage in every sampling period can be obtained by the following equation: t s (v s rs is )dt 0 t (v r i )dt s 0 s s s (16) We can write discrete time model of this equation as follows: s (k ) s (k 1) vs T rs is T (17) 57 ▓ 4 ( k ) ( k 1 ) v T r i T s s s s s These equations describe that stator flux linkage is depended to v s and v s , and so to the voltage vectors of the inverter. The stator flux angle can be calculated by the following equation: (18) S tan 1 ( s ) s Thus by selecting the proper space voltage vector, the stator flux can be controlled. From (11), electric torque equation can be expressed verses α-β parameters as follow: Tm p s is s is (19) By combinational analysis of all states of 12 inverter keys, a total of 64 switching modes can be obtained. By applying transformation (3), 64 voltage vectors are projected on the α-β, z1-z2 and z3-z4 سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان subspaces. We have used SPIM-60-1n and SPIM-60-2n as illustrated in Fig 1. In the case of SPIM-60-2n, the projection of the voltage vectors on the z3-z4 subspace is zero [11] [12], and the space voltage vector selection is performed only on the α-β and z1-z2 subspaces. Fig 2 and Fig 3 show space voltage vectors on the α-β and z1-z2 subspaces for SPIM-60-1n and SPIM-60-2n, and Fig. 4 shows space voltage vectors on the z3-z4 subspaces for SPIM-60-1n. The decimal numbers in the figures, show switching states of the inverter switches. By converting each decimal number to a six digit binary number, the 1’s indicate, on state of the upper switch in the corresponding arm of the inverter. The most significant bit (MSB) of the number represents the switching state of phase a1, the second MSB for phase a2, the third for phase b1, and so on. 4-APPLICATION OF DIRECT CONTROL TO SIX PHASE DRIVES 4-1- Space voltage vector selection 24,6 0 28 a : 4, 10, 13, 22, 31,46 b : 8, 20, 26, 29, 44, 62 c : 16, 25, 40, 52, 58, 61 d : 17, 32, 41, 50, 53, 59 e : 1, 19, 34, 37, 43, 55 f : 2, 5, 11, 23, 38, 47 o : 0, 9, 18, 21, 27, 36 42, 45, 54, 63 TORQUE 12,30 c b 48,5 7 o a 14 56 d f 6,15 7 e 49 33,51 35 3,39 Fig. 2: Projection on the α-β plane, for SPIM-60-1n, and SPIM-60-2n 22,50 18 a : 3, 10, 17, 24, 31,59 b : 2, 16, 23, 30, 51, 58 c : 6, 20, 34, 48, 55, 62 d :4, 32, 39, 46, 53, 60 e : 5, 12, 33, 40, 47, 61 f : 1, 8, 15, 29, 43, 57 o : 0, 7, 14, 21, 28, 35 42, 49, 56, 63 19,2 6 c b f 11,25 9 38,5 2 o a 27 54 d e 41,1 Fig. 3: Projection on the z1-z2 plane, for SPIM-60-1n, and SPIM-60-2n 36 37,4 45 سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان a : 5, 17, 20, 23, 29,53 b : 1, 4, 7, 13, 16, 19, 22, 25 28, 31, 37, 49, 52, 55, 61 c : 2, 8, 11, 14, 26, 32, 35, 38 41, 44, 47, 50, 56, 59, 62 d : 10, 34, 40, 43, 46, 58 o : 0, 3, 6, 9, 12, 15, 18, 24, 27 30, 33, 36, 39, 45, 48, 51, 54 57, 60, 63 21 a b o c d 42 Fig. 4: Projection on the z3-z4 plane, for SPIM-60-1n.. The aim of DTC is to select proper stator components on z1-z2 and z3-z4 planes give space voltage vector to maintain both the 56 ▓ 5 minimum amplitude vectors. According to stator flux and electric torque within the Figs. 2-4, we choose the voltage vector set limits of their hysteresis bands. illustrated in (20). As can be seen, there are Electromechanical energy conversion take 6 voltage vectors which symmetrically place in the α-β subspace, thus for obtaining spatially distributed on plane. But the 6 maximum electromagnetic torque, the main vectors on plane correspond to zero idea is to choose the switching modes that voltage projection on z1-z2 and z3-z4 plane permit to have the maximum amplitude of for SPIM with two isolated neutrals, while voltage vectors (maximum projection their z3-z4 components are not null for on the α-β subspace), and to minimize z1-z2 SPIM with one common neutral. This and z3-z4 voltage vectors.To do this, one reduces significantly the harmonic currents may choose the following switching modes on z1-z2 plane while z3-z4 currents for that permit to have the maximum amplitude SPIM-1n are not null because of none zero voltage vectors (Fig. 2): voltage components on this plane. 49, 56, 28, 14, 7 and 35 (20) 4-3- Switching tables It must be noted that the switching modes This section introduces control tables for (20) generate zero voltage vectors on z1-z2 DTC of SPIM. Table 1 shows how different plane for both configurations (Fig. 3), The stator space voltage vectors change the projection of these voltages on the z3-z4 stator flux and electric torque in subspace for SPIM-60-2n are zeros, but for symmetrical SPIM. In this table it is SPIM-60-1n we see none zero voltage assumed that the stator flux is in the first vectors (Fig. 4). These none zero voltages sector of the space voltage vector plane. For generate harmonic currents on z3-z4 plane. showing influence of each space voltage These currents may be too much large if the vector on stator flux and electric torque, we machine leakage inductance or the inverter have used the arrows. For example, two switching frequency is little. arrows upward (↑↑) or downward (↓↓) represent that the quantity (stator flux or electric torque) is maximum or minimum, 4-2- CLASSICAL DTC METHOD FOR SPIM The proposed space voltage vector while one arrow shows less influence. The selection for SPIM is based on the fact that, arrow (↑↓), shows that the quantity doesn’t there is always vectors whose amplitude is change. high enough on plane where their سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان According to table 1, changing stator flux amplitude and electric torque by space voltage vectors can be explained as follow: if the stator flux is less than its reference, the space voltage vectors 35, 49, and 56 can be applied to increase the stator flux amplitude. For decreasing stator flux, space voltage vector 7, 14, and 28 can be selected. The space voltage vectors 14 and 49 have the greatest effect on the stator flux amplitude. The zero voltage vectors 0 and 63 haven’t any effect on the stator flux amplitude, except that flux weakening due to the stator resistance voltage drop. Like stator flux, for torque control also, effect of each space voltage vector can be explained. Space voltage vectors 28 and 56 increase electric torque while 0, 7, 14, 35, 49, and 63 decrease electric torque. Space voltage vectors 7, 28, 35, and 56 have the greatest effect on the electric torque. For controlling both stator flux and electric torque, we can conclude following laws based on the table 1. For decreasing both stator flux and electric torque we can apply space voltage vectors 7 or 14. For increasing both stator flux and electric torque we must apply space voltage vector 56. For increasing stator flux and decreasing electric torque, space voltage vectors 35 or 49 can be applied. For decreasing stator flux and increasing electric torque, the space voltage vector 28 must be used. For maintaining the stator flux amplitude and decreasing the electric torque, space voltage vectors 0, or 63 can be applied. This algorithm might be performed in every sampling period so that the stator flux and electric torque follow their references. According to these criteria, we introduce table 2, for DTC of symmetrical SPIM. This table have been used to perform space voltage vector selection process in every period. The same procedure has been used to apply DTC of SPIM-60-1n with selected voltage vector shown in (20). 5- SIMULATION RESULTS In order to predict the SPIM behaviour under classical DTC method, a simulation program using MATLAB/Simulink software has been developed. The torque and flux references are Tm*=0.2 N.m, and λs*0.06wb. The sampling period is fixed at 50 µs. The parameters of the simulated motor are given in table 3. Figs. 5 and 6 show simulation results for SPIM-60-1n and SPIM-60-2n respectively. The figures depict, the quadrature component of stator flux versus horizontal component of stator flux in the stationary reference frame, timing response of developed electromagnetic torque, the stator phase currents, α-β, z1-z2, and z3-z4 stator current components. As the Figs.5-a and 6-a show, after some transient, the stator flux locus becomes a circle and amplitude of stator flux remains almost constant in the command value. Figs.5-b and 6-b show the torque response of machine when a 0.3 N.m torque reference is applied in t=0 s. The figures show developed electromagnetic torque deviation from reference value is very low. Figs.5-c shows the phase currents are in their nominal amplitude for SPIM-602n (less than 5 A). Fig. 6-c shows some deviation from nominal values due to z3-z4 harmonic components for SPIM-60-1n (more than 5 A). As can be seen from Fig. 6-f, harmonic currents due to z3-z4 voltage components are more than 4 A. Table 1: Stator flux and electric torque variations 14 28 56 49 35 7 0, 63 ↓↓ ↓ ↑ ↑↑ ↑ ↓ ↓↑ ↓ ↑↑ ↑↑ ↓ ↓↓ ↓↓ ↓ λ Te Table 2: Stator flux and electric torque control in different sectors sector Uλs UTe 1 1 1 0 0 0 1 0 -1 1 0 -1 1 2 3 4 5 6 56 0 35 28 63 7 28 14 7 35 49 0 0 0 0 0 49 56 28 14 7 14 7 35 49 56 0 0 0 0 0 35 49 56 28 14 سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان Table 3: Induction machine parameters Rated power Rated torque VSI DC bus voltage Number of poles Mutual inductance Stator resistance Stator leakage inductance Rotor resistance Rotor leakage inductance Friction coefficient Inertia 90 W 0.3 Nm 42 V 2 30.9 mH 1.04 0.30 mH 0.64 0.65 mH 410-4 kg.m2/s 9.510-5 kg.m2 From the illustrated test results, it can be noted that the stator flux is well controlled in its reference value. The harmonic components of the stator phase currents Iz1Iz4 are almost near zeros for SPIM with two isolated neutrals, this is due to zero voltage vectors on z1-z2 and z3-z4 planes as we have shown it in Fig. 3 section 4. In the case of SPIM with one common neutral we see none zero current components on the z3-z4 plan, this is due to non-zero projections of the selected voltages on the z3-z4 plane. These results show the validity of classical DTC for SPIM with two isolated neutrals, while for SPIM with one common neutral classical DTC is not applicable. سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان 0.1 1 0.5 T [Nm] [web] 0.05 m 0 0 -0.05 -0.1 -0.1 -0.05 0 [web] 0.05 0.1 -0.5 0.8 1.2 1.4 t [s] Fig. 5b- Electromagnetic torque 10 10 5 5 Is Is [A] Iphase [A] Fig. 5a- Stator flux 0 -5 -10 0.8 1 1.2 0 -5 -10 1.4 0.8 10 10 5 5 Isz3 Isz4 [A] Isz1 Isz2 [A] t [s] Fig.5c- Stator phases current 0 -5 -10 0.8 1 1.2 t [s] Fig. 5e- Stator z1-z2 currents 1 1.2 1.4 t [s] Fig.5d- Stator α-β currents 0 -5 -10 1.4 1 0.8 1 1.2 1.4 t [s] Fig. 5f- Stator z3-z4 currents Fig. 5- Simulation results for DTC of SPIM-60-2n. 6- CONCLUSION In this paper, we have proposed classical direct torque control method for symmetrical six-phase induction machines. This method consists in choosing the switching modes in such a way that corresponding to high amplitude voltage vectors on plane, and minimum projected voltages on the z1-z2 and z3-z4 planes. Based on this criterion, we have proposed six voltage vectors among 64 space voltage vectors for application to SPIM. By the simulation results we have shown that the stator flux as well as the electromagnetic torque is well controlled in 53 ▓ 6 سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان 0.1 1 T [Nm] [web] 0.05 m 0 0.5 -0.05 -0.1 -0.1 -0.05 0 [web] 0.05 0 -0.5 0.1 10 10 5 5 Is Is [A] Iphase [A] Fig. 6a- Stator flux 0 -5 -10 0.8 1 1.2 1 1.2 1.4 t [s] Fig. 6b- Electromagnetic torque 0.8 1 0 -5 -10 1.4 0.8 10 10 5 5 Isz3 Isz4 [A] Isz1 Isz2 [A] t [s] Fig.6c- Stator phases current 0 -5 -10 0.8 1 1.2 0 -5 -10 1.4 t [s] Fig. 6e- Stator z1-z2 currents 1.2 1.4 t [s] Fig.6d- Stator α-β currents 0.8 1 1.2 1.4 t [s] Fig. 6f- Stator z3-z4 currents Fig. 6-Simulation results for DTC of SPIM-60-1n. its reference value. The stator phase harmonic currents Iz1-Iz4 are almost zeros for SPIM with two isolated neutrals that is due to zero voltage vectors on z1-z2 and z3-z4 planes. But in the case of SPIM with one common neutral we see none zero current components on the z3-z4 plan, this is due to non-zero projections of the selected voltage vectors on the z3-z4 plane. The results show the efficiency of the proposed method for DTC of SPIM with two isolated neutrals, while for SPIM with one common neutral the high amplitude current harmonics shows the method is not applicable. 52 ▓ 9 سيد قدرت اله سيف السادات، رضا کيانی نژاد/ علوم و مهندسي نصير-2 شماره-3 جلد-68 زمستان REFRENCES [1] D. Hadiouche, H. Razik, and A. Rezzoug, “Modeling of a double star induction motor for space vector PWM control,” in Conf. Rec. Int. Conf. Electrical Machines (ICEM), Espoo, Finland, 2000, pp. 392–396. [2]R. Kianinezhad, B. Nahid, L. Baghli, F. Betin, G. A. Capolino;“ Modeling and Control of SixPhase Symmetrical Induction Machine Under Fault Condition Due to Open Phases”; IEEE Transactions on Industrial Electronics, Vol. 55, No. 5, pp: 1966-1977, May 2008. [3] K. Gopakumar, V. T. Ranganathan, and S. R. Bhat, “Split-phase induction motor operation from PWM voltage source inverter,” IEEE Trans. Ind. Appl., vol. 29, no. 5, pp. 927–932, Sep./Oct. 1993. [4] R. Alcharea, B. Nahidmobarakeh, F. Betin and G. A. Capolino;“ Decoupling Modeling and Control of Six-Phase Induction Machines under Open Phase Fault Conditions”; IEEE International Conference on Industrial Technology, IECON 2006; 7-10 nov. 2006, France. [5] R. Bojoi, M. Lazzari, F. Profumo, and A. Tenconi, “Digital field oriented control for dualthree phase induction motor drives,” IEEE Trans. Ind. Appl., vol. 39, no. 3, pp. 752–760, May/Jun. 2003. [6]R. Kianinezhad, B. Nahidmobarakeh, F. Betin and G. A. Capolino;“ A New Field Orientation Control of Dual Three Phase Induction Machines”; IEEE International Conference on Industrial Technology, ICIT 2004; 8-10 Dec. 2004. [7] R. Bojoi, A. Tenconi, F. Profumo, G. Griva, and D. Martinello, “Complete analysis and comparative study of digital modulation techniques for dual three-phase AC motor drives,” IEEE Power Electronics Specialists Conf. (PESC), Cairns, Australia, pp. 851–857, 2002 [8] D. Hadiouche, L. Baghli, and A. Rezzoug, “Space vector PWM techniques for dual threephase AC machine: Analysis, performance evaluation and DSP implementation,” IEEE Industry Applications Society Conference (IAS), Salt Lake City, UT, pp. 648–655, 2003, [9] R. Kianinezhad, B. Nahidmobarakeh, F. Betin and G. A. Capolino;“ Multi-Vector SVM: A new approach to Space Vector Modulation Control for Six-Phase Induction Machines”; IEEE Industrial Electronics Society Conference, IECON 2005; 6-10 Nov. 2005, USA. [10] I. Takahashi, T. Noguchi, ‘A new quick-response and high efficiency control strategy of an induction machine’, IEEE Trans. On IA, Vol. 22, N. 5, pp. 820-827, Sept./Oct. 1986, [11] R. Kianinezhad, B. Nahid, F. Betin, G. A. Capolino;”A novel direct torque control (DTC) method for dual three phase induction motors” IEEE International Conference on Industrial Technology, ICIT 2006; Dec. 2006, India. [12] R. Bojoi, F.Farina, G. Griva, F. Profumo, A. Tenconi , “Direct Torque Control for Dual Three Phase Induction Motor Drives”, Conf. Rec. IEEE-IAS 2004,Seattle, USA, pp. 13421349, October 2004, 51 ▓ 11