Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electric machine wikipedia , lookup
Ground (electricity) wikipedia , lookup
Stray voltage wikipedia , lookup
Current source wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Stepper motor wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power engineering wikipedia , lookup
Opto-isolator wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Mains electricity wikipedia , lookup
Power electronics wikipedia , lookup
Distribution management system wikipedia , lookup
Buck converter wikipedia , lookup
Single-wire earth return wikipedia , lookup
Surface-mount technology wikipedia , lookup
History of electric power transmission wikipedia , lookup
Circuit breaker wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resonant inductive coupling wikipedia , lookup
Electrical substation wikipedia , lookup
Earthing system wikipedia , lookup
Rectiverter wikipedia , lookup
Alternating current wikipedia , lookup
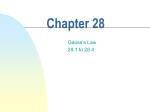
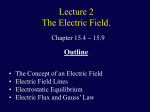
ISBN 978-0-620-44584-9 Proceedings of the 16th International Symposium on High Voltage Engineering c 2009 SAIEE, Innes House, Johannesburg Copyright ° DETERMINATION OF ACCEPTABLE CLOSING TIME SCATTER AND RESIDUAL FLUX MEASUREMENT UNCERTAINTY FOR CONTROLLED SWITCHING OF TRANSFORMERS A. Ebner1* High Voltage Laboratory, Swiss Federal Institute of Technology Zurich, Switzerland *Email: [email protected] 1 Abstract: Theoretically, controlled switching taking into account the residual flux is able to fully eliminate inrush currents. Due to non-idealities in the field (closing time scatter, residual flux measurement uncertainty) that significantly affect the performance of controlled switching, inrush currents of 1.0 pu must be tolerated. To calculate the maximum acceptable tolerances of both nonidealities in this case, systematic energisation studies are carried out using a topological correct transformer model and the “Delayed Closing” strategy. The results show that there is a linear relationship between tolerable closing time scatter and maximum residual flux uncertainty. Consequently, the required accuracy in the determination of the residual flux can be calculated if the proposed analysis is carried out and the closing time scatter of the installed circuit breaker is known. 1. 2. INTRODUCTION SIMULATION MODEL Power transformers of the transmission level wherefore controlled switching is preferably used are mainly built as multi-legged transformers with separated windings ([5], [6]). The single-phase units as well as the fivelegged or shell-type units are always equipped with a delta-winding whereby the phases respectively the legs are coupled. Hence, they behave similar to the threelegged transformer which is the most representative configuration and should be used for this analysis. Besides, the windings of at least one side are starconnected. A transformer that fulfils all these requirements is chosen for this study and its most relevant data are listed in Table 1. The magnetising current and the reserve of the core utilisation of this transformer are approximately in the lowest third respectively in the middle of the typical ranges; the short-circuit impedance lies on the lower border of its typical range (details see [7]). Uncontrolled energisation of power transformers can lead to very high inrush currents whose maximum values exceed many times the rated current. They can cause several undesired effects like temporary overvoltages, a reduced power quality and false tripping of the network protection schemes ([1]). Moreover, high inrush currents lead to huge current forces in the windings that are locally bigger than the short-circuit current forces ([2]) and possibly reduce the lifecycle of power transformers. Several methods to reduce or eliminate these inrush currents were developed in the last years whereof “controlled switching taking into account the residual flux” is the most promising application ([3]). In theory, the inrush currents can be completely eliminated with this method. Nevertheless, the algorithm is hardly deployed in substations (e.g. [4]) because in most cases additional voltage sensors have to be installed close to the power transformer to measure the magnetic fluxes. This significantly increases the costs of controlled transformer switching. Table 1: Transformer data Thus, new methods will be developed to identify the residual flux with the existing sensor system that does not allow an exact measurement. The first step in this process is to calculate the required accuracy for the determination of the residual flux. Furthermore, the closing time scatter of the circuit breaker significantly affects the performance of controlled switching in the field. Hence, this paper investigates the influence of closing time scatter and residual flux measurement uncertainty on the maximum inrush current peak. Based on the results of these analyses the maximum acceptable tolerances of the circuit breaker closing time scatter respectively of the residual flux measurement uncertainty are calculated. Pg. 1 Rated values Power SR 400 Voltage UR 16.8/0.42 kV Current IR 13.75/550 A Vector group Dyn5 Core type three-legged kVA No-load test data (low voltage side) Current I0 0.282 % Losses 912 W Short-circuit test data (high voltage side) Short-circuit impedance ZSC 5.99 Pu Losses PSC 6057 W Resistances High voltage side (∆) RHV 10.0244 Ω Low voltage side (Y) RLV 1.5782 mΩ Magnetic data Reserve of core utilisation ΦReserve 0.19 pu P0 Paper G-7 ISBN 978-0-620-44584-9 2.1. Proceedings of the 16th International Symposium on High Voltage Engineering c 2009 SAIEE, Innes House, Johannesburg Copyright ° floating potentials, numerical capacitances must be included in the dual magnetic core model. They have to be chosen small enough so that they do not affect the results. Modelling of the transformer According to [8] and [9] the simulation model of the power transformer must be correct in the relevant frequency range from 0.1 Hz to 1 kHz. Within this range subsequent points must be properly included in the transformer model: • Correctness of the winding connection • Topologically right core model • Consideration of the hysteresis and the saturation behaviour of the magnetic core • Modelling of the leakage inductances • Possibility to set residual flux values The capacitive behaviour of the transformer can be neglected because its influence is irrelevant for the inrush analyses. 2.2. Model of the other components For a worst case analysis the effects of the grid and the line between the circuit breaker and the transformer must not be modelled because they cause additional damping. Considering these elements would be equivalent with an increased winding resistance respectively leakage inductance that diminishes the inrush current peaks. Hence, the grid is modelled as an ideal three-phase voltage source. The circuit breakers are ideal time-controlled switches without prestrike characteristics because it can be assumed that this effect is compensated by the controller in the field. An excellent overview of different transformer models for frequencies up to some kHz can be found in [10]. Only the topology-based model ([11]) is able to fulfil all requirements mentioned above and has to be used in this study. Figure 1 shows the complete model in EMTP-ATP where the transformer is located on the right side. The winding resistances Rp are separated from the dual magnetic core by ideal transformers. The magnetic core model consists in its simplest form of three nonlinear, hysteretic inductances of type “96 pseudo-nonlinear hysteretic inductor” (LmA, LmB and LmC) as well as the linear leakage inductances Lsh that have to be placed in the dual magnetic core too due to their origin. A partition of the leakage inductance in a part facing towards the primary side and in a part facing towards the secondary side is not necessary because the transformer will only be switched under no-load conditions. An important requirement for the model is a simple parameterisation which can be achieved by using the type-96 elements. They just need the major loop of the magnetisation curve that can be identified easily. Besides, the residual flux value of these elements can be assigned prior to the simulation start. Due to the fact that EMTP-ATP cannot deal with 2.3. Controller modules In principle only one simulation can be done at once in EMTP-ATP. For the systematic analyses where the deviations will be varied regularly a lot of simulations with different combinations of residual fluxes and closing times are needed. Thus, controller modules were implemented in MATLAB that vary the closing times and the residual flux values, start the simulations and analyse the current waveforms. A more detailed description of these modules can be found in [12]. The residual flux patterns for the three-phase analyses were chosen to be symmetrical sine curves that agree very well with the experimental results in [12]: ⎡ ⎛ 2 ⎞⎤ cos ⎜ ω0 ⋅ t − π ⎟ ⎥ ⎢ ⎡ Φ Res ,U ⎤ 3 ⎠ ⎢ ⎝ ⎥ ⎢ ⎥ Φ = 0.6 ⋅ cos ⋅ pu ω t ⎢ ( ) ⎥ 0 ⎢ Res ,V ⎥ ⎢ ⎥ ⎢⎣ Φ Res ,W ⎥⎦ ⎢ cos ⎛ ω ⋅ t − 4 π ⎞ ⎥ 0 ⎜ ⎟ ⎢⎣ ⎝ 3 ⎠ ⎥⎦ (1) Figure 1: Simulation model Pg. 2 Paper G-7 Proceedings of the 16th International Symposium on High Voltage Engineering c 2009 SAIEE, Innes House, Johannesburg Copyright ° ISBN 978-0-620-44584-9 3. Figure 3. The curves begin at different points because the maximum residual flux value of 0.987 pu cannot be exceeded (residual flux value of the major loop). For positive deviations some numerical problems occur during the simulations (vertical lines) but they do not significantly affect the results. In this case, the width of the area without inrush currents is independent of the residual flux value and all curves are congruent. Thus, the maximum inrush current peak depends only on the residual flux deviation but not on the residual flux value. Again, the results can be reduced to the curve with zero residual flux in phase V. If no inrush currents are allowed a maximum uncertainty in the residual flux determination of ±0.21 pu can be tolerated. Due to the damping effects of the winding resistances and the hysteresis losses this value is slightly higher than the theoretical value that is equal to the reserve of the core utilisation (0.19 pu). RESULTS IF NO INRUSH CURRENTS ARE TOLERATED The closing time scatter and the residual flux measurement uncertainty occur both together in real substations. To easier analyse the results, the effects of the deviations are investigated separately. Thus, on the one hand a configuration with real circuit breakers and ideal residual flux measurement and on the other hand a configuration with ideal circuit breakers and real residual flux measurement is evaluated. Here, only the energisation process of the first phase will be investigated which is always the centre phase V. 3.1. Acceptable closing time scatter Absolute Value of Inrush Current Peak [pu] 5 Φ Res,V Absolute Value of Inrush Current Peak [pu] Figure 2 shows the results for a configuration with real circuit breaker and ideal residual flux measurement whereas the closing time scatter is varied from -5 ms to +5 ms and the residual flux in the centre leg ΦRes,V lies in the range of [-0.6 … 0.0] pu. Analogue results arise for positive residual flux values in phase V wherefore they do not need to be discussed. In Figure 2 it can be seen that for a certain closing time deviation the maximum inrush current peak for the positive deviation is always higher than that for the negative one. Furthermore, the width of the region without inrush currents marginally depends on the residual flux value. The smallest region without inrush currents is marked by the curve with zero residual flux in phase V that has to be consulted for the maximum tolerable closing time scatter independent of the residual flux value. This finally leads to a maximum closing time scatter of ±0.67 ms if the residual flux measurement is ideal. 3 3.3. = 0 pu -3 -2 -1 0 1 2 3 Deviation from ideal Closing Time [ms] 4 5 Figure 2: Maximum value of inrush current depending on the closing time deviation and der residual flux for the energisation of the first phase 3.2. = 0 pu = -0.1 pu = -0.2 pu = -0.3 pu = -0.4 pu = -0.5 pu = -0.6 pu 2.5 2 1.5 1 0.5 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 Deviation from ideal Residual Flux [pu] 0.8 1 Interdependence of the deviations According to [12] the analyses of first phase energisation are sufficient in this case and lead to the most stringent conditions for the acceptable tolerances. As said before, both deviations occur together in real substations. Thus, a combined approach has to be developed that includes both deviations. If for example only 50 % of the tolerable closing time scatter is used by the circuit breaker according to Figure 1, the other 50 % can be used for the uncertainty in the residual flux measurement (Figure 3). Consequently, there is a linear relationship between the tolerable closing time deviation and the residual flux deviation. The two special cases discussed above mark the extreme positions of this approach. With these results Figure 4 can be plotted that shows the desired relationship. Typical closing time scatter of circuit breakers that are used for controlled switching reaches values of ±0.5 ms to ±1.0 ms ([13]). Even with these very precise circuit breakers controlled switching of transformers without inrush currents is not always possible. Therefore, it is hardly realisable in the field. The toleration of a certain inrush current is necessary for a successful application in the field. 1 -4 Res,V Figure 3: Maximum value of inrush current depending on the residual flux deviation and the residual flux for the energisation of the first phase 2 0 -5 Φ 3 0 -1 = -0.1 pu = -0.2 pu = -0.3 pu = -0.4 pu = -0.5 pu = -0.6 pu 4 3.5 Tolerable residual flux measurement uncertainty Analogue to the analysis of the closing time scatter the effect of residual flux deviations has to be evaluated as well. Hereby, an ideal circuit breaker without closing time deviation and a real residual flux measurement are emulated. The optimal closing time is calculated based on the residual flux value in the legend of Figure 3; afterwards, the residual flux value in the transformer core will be changed according to the abscissa in Pg. 3 Paper G-7 Proceedings of the 16th International Symposium on High Voltage Engineering c 2009 SAIEE, Innes House, Johannesburg Copyright ° Residual Flux Measurement Uncertainty [pu] ISBN 978-0-620-44584-9 For the calculation of the maximum residual flux measurement uncertainty, Figure 3 is reused. The maximum residual flux measurement uncertainty is marked by the intersection point of the curves with the 1.0 pu line which amounts to ±0.465 pu for the 400 kVA transformer. 0.25 0.2 0.15 0.1 With these two values the corresponding plot to Figure 4 can be drawn (Figure 5). Now, controlled switching can be applied to this power transformer if circuit breakers are installed that are suitable for controlled switching. In worst case, a circuit breaker with a closing time scatter of ±1.0 ms is utilised. Under these circumstances a residual flux measurement uncertainty of up to ±0.15 pu can be admitted. 0.05 0 0 0.1 0.2 0.3 0.4 0.5 Closing Time Scatter [ms] 0.6 0.7 4. Residual Flux Measurement Uncertainty [pu] Figure 4: Maximum acceptable residual flux uncertainty depending on the closing time scatter of the circuit breaker if no inrush current is allowed RESULTS IF AN INRUSH CURRENT OF 1 PU IS PERMITTED 0.5 0.4 In the present case an inrush current peak of 1.0 pu is tolerated so that realistic requirements for the acceptable deviations can be found. If transient inrush currents occur during the energisation of a three-phase transformer, the core was driven into saturation. Hence, different dynamic magnetic flux waveforms occur after first phase energisation in the other two phases compared to the behaviour in chapter 3. Therefore, the “Delayed Closing” strategy which is the preferred algorithm for controlled switching in the field has to be verified again. Figure 5: Maximum acceptable residual flux uncertainty depending on the closing time scatter of the circuit breaker if an inrush current of 1.0 pu is tolerated 4.1. 4.2. Energisation of the first phase Once again, the effects of both deviations are analysed separately as already done in chapter 3. Thereby, the results of Figure 2 and Figure 3 can be used again because they are just interpreted with different conditions. The toleration sector is not anymore limited by the general occurrence of inrush currents as in chapter 3 but newly by the 1.0 pu line. Hence, this leads to wider regions for the tolerances and thus less demanding requirements emerge for the circuit breaker as well as mainly for the residual flux measurement device. 0.3 0.2 0.1 0 0 0.2 0.4 0.6 0.8 1 Closing Time Scatter [ms] 1.2 1.4 Acceptable closing time deviation for second and third phase energisation if the “Delayed Closing” strategy is used The fact that first phase energisation is sufficient to calculate the tolerances according to chapter 3.3 is not any longer valid in this case because the first phase will be energised with 1.0 pu inrush current in worst case. Therefore, the systematic study for second and third phase energisation using the “Delayed Closing” strategy has to be carried out with the simulation model in Figure 1. With this strategy, these phases are energised independently of their residual flux values. Consequently, only the bearable closing time scatter The results of Figure 2 show that the negative closing time deviation of a certain residual flux value is bigger than the positive one for a maximum inrush current peak of 1.0 pu. Thereof, the smaller value has to be chosen because the closing time scatter of the circuit breaker is symmetrical in both directions. Due to the fact that the curves for positive deviations are identical for different residual fluxes up to approximately 1.5 pu inrush current, the tolerable closing time scatter is independent of the residual flux pattern again. In the present case the maximum closing time scatter amounts to ±1.5 ms. In comparison with the results of chapter 3, the value can be increased by more than 100 % if an inrush current of 1.0 pu is tolerated. 1.15 Closing Time Scatter [ms] 1.1 4 Periods 4.5 Periods 1.05 1 0.95 0.9 0.85 0.8 0.75 -0.6 -0.4 -0.2 0 0.2 Residual Flux in Phase V [pu] 0.4 0.6 Figure 6: Tolerable closing time scatter for second and third phase energisation using “Delayed Closing” and a maximum inrush current peak of 1.0 pu in all phases Pg. 4 Paper G-7 Proceedings of the 16th International Symposium on High Voltage Engineering c 2009 SAIEE, Innes House, Johannesburg Copyright ° ISBN 978-0-620-44584-9 has to be investigated in this case. Thereby, the first phase is energised so that the inrush current peak is exactly 1.0 pu. Possibly, the dynamic magnetic fluxes of the two other phases have not yet reached their steady-state course after a delay of 4 periods (energisation instant of the second and third phase). Thus, the residual flux pattern could influence the results and has to be considered in this study. 1 Phase U Phase V Phase W Magnetic Flux [pu] 0.5 0 -0.5 By tolerating a maximum inrush current peak of 1.0 pu in the second and third phase as well, the acceptable tolerances of the closing time scatter after a delay of 4 periods are displayed by the solid line in Figure 6. It can be seen that the acceptable tolerances are different for negative and positive residual flux values in phase V. This indicates that the dynamic magnetic fluxes have not yet reached their steady-state course which is confirmed by Figure 7. The dynamic magnetic fluxes have assimilated after one to two periods as in the case of optimal first phase energisation without inrush currents (Figure 8) but they still possess a significant offset due to small damping in the system. This offset influences the acceptable closing time scatter as shown in Figure 6 (solid line). An increased delay of 6 to 8 periods will not improve the results. The maximum closing time scatter for positive residual fluxes in phase V can only be raised to 1.1 ms if the delay is adjusted to 4.5 periods (dotted line in Figure 6). 1 5. -1 40 60 80 Time [ms] 100 120 60 80 Time [ms] 100 120 140 CONCLUSIONS It has been shown that controlled switching of transformers without inrush currents is hardly possible in the field. This originates from the non-idealities of the circuit breaker (closing time scatter) and of the device for the residual flux determination (measurement uncertainty). Thus, an inrush current of 1.0 pu must be accepted to get realistic tolerances for these non-idealities. It was demonstrated that – for this case as well – the systematic studies of first phase energisation with zero residual flux in phase V are sufficient to determine the tolerances if the “Delayed Closing” strategy is used. Furthermore, it can be concluded that there is a linear relationship between the acceptable closing time scatter of the circuit breaker and the uncertainty of the device that determines the residual flux. -0.5 20 40 This paper presented a new transformer model based on the principle of duality that fulfils all important requirements for the energisation studies of threelegged power transformers. Furthermore, controller modules were used to systematically vary the closing time scatter as well as the residual flux measurement uncertainty. The interpretation of these results finally leads to the maximum acceptable tolerances for the closing time scatter of the circuit breaker and for the uncertainty of the residual flux measurement device that are important parameters for the implementation of controlled transformer switching in the field. 0 -1.5 0 20 Figure 8: Waveforms of the magnetic fluxes after energisation of the first phase without inrush current for biggest flux asymmetry in phases U and W Phase U Phase V Phase W 0.5 Magnetic Flux [pu] -1 0 140 Figure 7: Waveforms of the magnetic fluxes after energisation of the first phase with an inrush current of 1.0 pu for biggest flux asymmetry in phases U and W The maximum acceptable closing time scatter for the second and third phase amounts to ±1.1 ms that is smaller than the value of the first phase (±1.5 ms). Because this value is higher than the maximum closing time scatter of circuit breakers that are used for controlled switching (±1.0 ms) and the whole tolerance for second and third phase switching can be used for the closing time deviation, the tolerances calculated with the results of the first phase energisation studies are still sufficient. A representative three-legged 400 kVA transformer with star-connected windings was analysed adopting the methods discussed above. Using circuit breakers that are suitable for controlled switching the maximum residual flux uncertainty amounts to ±0.15 pu in worst case. Hence, new methods to determine the residual fluxes of this power transformer with the existing sensor system should be able to identify the residual fluxes at least with this accuracy. Pg. 5 Paper G-7 ISBN 978-0-620-44584-9 6. Proceedings of the 16th International Symposium on High Voltage Engineering c 2009 SAIEE, Innes House, Johannesburg Copyright ° [6] J. Taylor, D. J. Bornebroek, “Main Transformer Arrangements and related Matters in Generating Stations – Experience and Practices adopted by various Utilities in the Countries represented by the Members of Study Committee 23,” Electra, no. 82, pp. 87–108, May 1982. [7] A. Ebner, “Remanenzflussbestimmung für das kontrollierte Einschalten von Transformatoren”, Ph.D. thesis at ETH Zurich, to be published, 2009. [8] CIGRE WG33.02, “Guidelines for Representation of Network Elements when Calculating Transients”, CIGRE Brochure no. 39, 1990. [9] IEEE WG 15.08.09, “Modeling and Analysis of System Transients Using Digital Programs”, IEEE catalogue no. 99TP133-0, 1998. [10]J. A. Martinez, B. A. Mork, “Transformer Modeling for Low- and Mid-Frequency Transients – A Review”, IEEE Transactions on Power Delivery, vol. 20, no. 2, pp. 1625–1632, April 2005. [11]E. C. Cherry, “The Duality between interlinked Electric and Magnetic Circuits and the Formation of Transformer Equivalent Circuits”, Proceedings of the Physical Society, sec. B, vol. 62, pp. 101– 111, February 1949. [12]A. Ebner, “Controlled Switching of Transformers Effects of Closing Time Scatter and Residual Flux Uncertainty”, Universities Power Engineering Conference 2008 (UPEC 2008), September 2008. [13]A. C. Carvalho, W. Hofbauer, P. Högg, K. Fröhlich, “Controlled Switching as a reliable Means to reduce Stresses imposed on the CircuitBreaker and the Network”, CIGRE SC 13 Colloquium 1995 (Florinapolis, Brazil), no. 1.10, 1995. ACKNOWLEDGMENTS The author would like to thank Mr. Zinnbauer from SGB Starkstrom-Gerätebau GmbH for the interesting discussions and for providing the data of the transformer used in this study. 7. REFERENCES [1] A. Ebner, “Begrenzung von transienten Überspannungen und Inrush-Strömen durch kontrolliertes Schalten von Leistungstransformatoren“, FKH-/VSE-Fachtagung 2008: „Überspannungen und Isolationskoordination im Hochspannungsnetz“, November 2008. [2] M. Steurer, K. Fröhlich, “The Impact of Inrush Currents on the Mechanical Stress of High Voltage Power Transformer Coils,” IEEE Transactions on Power Delivery, vol. 17, no. 1, pp. 155–160, January 2002. [3] J. H. Brunke, K. J. Fröhlich, “Elimination of Transformer Inrush Currents by Controlled Switching – Part I: Theoretical Considerations,” IEEE Transactions on Power Delivery, vol. 16, no. 2, pp. 276–280, April 2001 [4] A. Mercier, Y. Filion, E. Portales, A. Salibi, “Transformer Controlled Switching Taking into Account the Core Residual Flux – A real Case Study,” CIGRÉ Session 2002, no. 13-201 [5] E. Colombo, G. Santagostino, “Results on the Enquiries on actual Network Conditions when Switching Magnetizing and Small Inductive Currents and on Transformer and Shunt Reactor Saturation Characteristics,” Electra, no. 94, pp. 35– 53, May 1984. Pg. 6 Paper G-7