Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Symmetry in quantum mechanics wikipedia , lookup
Rolling resistance wikipedia , lookup
Semi-automatic transmission wikipedia , lookup
Virtual work wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Equations of motion wikipedia , lookup
Coriolis force wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Center of mass wikipedia , lookup
Fictitious force wikipedia , lookup
Automatic transmission wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Mass versus weight wikipedia , lookup
Jerk (physics) wikipedia , lookup
Centrifugal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
Transmission (mechanics) wikipedia , lookup
Differential (mechanical device) wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Moment of inertia wikipedia , lookup
Mitsubishi AWC wikipedia , lookup
Work (physics) wikipedia , lookup
Torque wrench wikipedia , lookup
Friction-plate electromagnetic couplings wikipedia , lookup
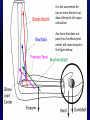
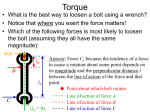
KINE 3301 Biomechanics of Human Movement Computing Torque Chapter 11 Torque: Forces that cause rotation The force F shown below is applied directly thru the center of mass of the object. The object will translate in the direction of the force. The force F shown below is not applied directly thru the center of mass of the object. The object will translate in the direction of the force and rotate. The object does not rotate. The object rotates & translates. Definition of Torque • Torque is defined as a force that causes or will tend to cause rotation. • Torque is also referred to as moment of force or a moment. • Torque is computed by multiplying the magnitude of the force by the lever arm as follows: 𝜏 = 𝐹 ×𝑙 Where 𝜏 is the torque in N∙m, 𝐹 is the magnitude of the force in N, and 𝑙 is the lever arm in m. Torque is a vector with its direction defined by the right hand rule, CCW rotation is positive, CW is negative. To compute torque determine: the axis of rotation (point of torque calculation), line of action of the force, magnitude of force, lever arm (moment arm or perpendicular distance), and the direction of rotation the force causes about the axis of rotation. Compute the Torque about Points A & B The 100 N force causes a positive (CCW) +20 N∙m torque about point A. The 100 N force causes a negative (CW) −50 N∙m torque about point B. A force that passes thru the point of torque calculation (axis of rotation) causes no torque about that point. Compute the Torque about C It is not uncommon for two or more forces to act about the point of torque calculation. Torque When Two or More Forces Act Any force that does not pass thru the elbow joint center will cause torque in the figure below. Compute the Torque about A & B The |100 N| force causes negative rotation about point A. The |100 N| force causes positive rotation about point B. Compute the Sum of Torques about A Στ =? Compute the Sum of the Torques about the Center of the Fan Angular Version of Newton’s Laws of Motion • I. Law of Inertia: A body at rest stays at rest, a rotating body stays in rotation unless acted upon by a net torque. • II. Law of Acceleration: The angular acceleration (𝛼) a body experiences is directly proportional to the torque (τ), inversely proportional to the moment of inertia (Ι), and in the direction of the net torque. Στ = Ι𝛼 • III. Law of Reaction: For every torque there is an equal and opposite torque. Law of Inertia • Inertia is the natural tendency of an object to remain at rest, or rotating at a constant angular velocity (𝜔). • Moment of Inertia is defined as an object’s resistance to angular change. • The units for moment of inertia (I) are kg∙m2 • It is a function of mass and length and how the mass is distributed about an axis of rotation. Calculation of Moment of Inertia Examples of Moment of Inertia The actual value of ICM will depend upon the height and mass of the individual. Moving the body segments closer to the axis of rotation decreases the moment of inertia. Which Object is More Difficult to Rotate? Law of Acceleration • The angular acceleration (𝛼) a body experiences is directly proportional to the torque (τ), inversely proportional to the moment of inertia (Ι), and occurs in the direction of the net torque. Στ = Ι𝛼 Law of Acceleration • The angular acceleration (𝛼) a body experiences is directly proportional to the torque (τ), inversely proportional to the moment of inertia (Ι), and occurs in the direction of the net torque. Στ = Ι𝛼 Law of Acceleration • The angular acceleration (𝛼) a body experiences is directly proportional to the torque (τ), inversely proportional to the moment of inertia (Ι), and occurs in the direction of the net torque. Στ = Ι𝛼 Law of Reaction • For every torque there is an equal and opposite torque. Opposite & Equal Joint Torques The torques are equal and opposite across each joint. The red torque plantar flexes the foot about the ankle, the blue torque plantar flexes the lower leg about the ankle. Complete the FBD, Compute Rx, Ry, α for the diver shown below. Bicep Force to Hold 30 lbs (133N) Rotational Work for a Non-Constant Torque Ave = 53 N∙m For a non-constant torque use the average torque (𝜏) of 53 Nm to compute rotational work. The joint rotated from an initial angle (𝜃𝑖 ) of 1.54 r to a final angle (𝜃𝑓 ) of 0.1 r, compute the rotational work. 𝑊𝑅 = 𝜏 𝜃𝑓 − 𝜃𝑖 𝑊𝑅 = 53𝑁 ∙ 𝑚 0.1𝑟 − 1.54𝑟 𝑊𝑅 = −76.32 𝑁 ∙ 𝑚 Compute the rotational work for the concentric (knee extension) and eccentric (knee flexion) phases of the exercise shown below.