Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
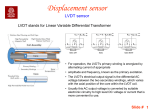
IJECT Vol. 6, Issue 1, Spl-1 Jan - March 2015 ISSN : 2230-7109 (Online) | ISSN : 2230-9543 (Print) Simulation of Self Calibrated Linear Variable Differential Transformer (LVDT) using PIC Micro-controller 1 Koushik Pyne, 2Vishwanath Gupta Director, G.E Motors PVT. LTD, Sheoraphully, India Assistant Professor, Dept. of EE, SKFGI, Mankundu, WB, India 1 2 Abstract In this proposed work a Linear Variable Differential Transformer (LVDT) is self calibrated with the help of a PIC18F458 (Programmable Inter-phase Controller) microcontroller based on the regression equation which is derived by the method of least squares. The proposed work is simulated based on experimental data obtained from LVDT trainer kit by using the software Proteus Design Suite ISIS Professional v7.7SP2 which incorporates PIC18F458. However, the standard data obtained are digital which need to be converted to analog form for real time applications. (digital) is given at the input port of the microcontroller and the corresponding error is calculated using interpolation technique (as the error varied linearly between two consecutive test data) and then the corresponding standard data is obtained and displayed at the output port. This digital data can then be converted to corresponding analog data with the help of Digital to Analog converter and used as control signals for various applications. The scheme of the proposed work can be explained with the help of the schematic diagram shown in fig. 1. Keywords Self-Calibration; Regression; Microcontroller I. Introduction In the present scenario of technological advancement, sensors are playing a very important part. They are part of almost all major upcoming technologies. Sensors have found various applications in our day to day life and their use is increasing to a rapid extent. They are the heart and soul of almost every automation circuit of present day. Various sensors like temperature sensors, magnetic sensors, position sensors etc. have already found immense applications in recent technological advancements. But, most of the sensors that are being used are not standard. In order to make the sensors standard, they have to be calibrated with the help standard sensors or they can be self calibrated as has been discussed in the proposed work. In this proposed work a Linear Variable Differential Transformer (LVDT) is self calibrated with the help of a PIC (Programmable Interphase Controller) microcontroller based on basic statistical methods. The proposed work if found to give acceptable results will help to calibrate most of the modern day sensors whose standard data follow specific mathematical functions. This will help us to remove the various inherent instrumental errors and make our calculations more accurate. Although the standard values could have been obtained by writing simple programs in C or MATLAB but, then these standard values could not be used as control signals as they are not actually obtained at the sensor output. In order to make the standard values available as control signals an additional interface has been created via PIC microcontroller. The self calibrated sensor will be more accurate and the output can be post processed with more accuracy and applied to various control circuits which control particular processes. This will enhance the credibility of the system in which the self-calibrated sensor is used. Fig. 1: Schematic Diagram The proposed work is simulated by using the simulated model of PIC18F458 present in Proteus Design Suite ISIS Professional v7.7SP2 software which has a wide range of electrical and electronics simulation models including microcontrollers and gives real time results on the oscilloscope. In order to simulate the model in Proteus Design Suite ISIS Professional v7.7SP2 the algorithm for the regression equation needs to be written in C and converted into corresponding .hex file which is to be burnt on the simulated model of PIC18F458. III. PIC18F458 Microcontroller The PIC18F family of microcontroller is one of the most advanced and highest performing family among the 8 bit PIC microcontrollers. The fact that PIC18F458 is available in 18 to 80 pin packages make it an ideal choice for new designs because it allows easy migration to more powerful versions of the chip without losing software compatibility. The block diagram of the PIC18F is shown in fig. 2. II. Methodology In the first stage laboratory experiment is performed for obtaining the test data (analog) for LVDT. Then this analog data is converted into digital data with the help of microcontroller PIC18F458 and this data is then used as test data to obtain the best fit curve (straight line in case of LVDT) by the method of regression. This best fit curve data is taken as the standard data for the particular LVDT. So corresponding to each test data we get a standard data and therefore an error for each test data. In the next stage, a test data w w w. i j e c t. o r g International Journal of Electronics & Communication Technology 115 ISSN : 2230-7109 (Online) | ISSN : 2230-9543 (Print) IJECT Vol. 6, Issue 1, Spl- 1 Jan - March 2015 (2) Equation (1) is known as Regression equation of y on x, and equation (2) as Regression equation of x on y. The coefficient byx appearing in the regression equation of y on x is known as the regression coefficient of y on x. Similarly, bxy is called the regression coefficient of x on y. The geometrical representation of the linear regression equation (1) and (2) are known as regression lines. These lines are “best fitting” straight lines obtained by the method of least squares [7]. The value of regression coefficient of y on x is given by (3) Where, Ryx is the correlation coefficient between x and y Sy is the standard deviation of y Sx is the standard deviation of x The value of correlation coefficient between x and y is given by Fig. 2: Block Diagram of PIC18 IV. Self-calibration of LVDT For obtaining the test data for our experiment, the LVDT trainer kit at the Sensor and Transducer Laboratory of Supreme Knowledge Foundation Group of Institutions is used as shown in fig. 3. The value of standard deviation of x is given by (4) and the value of standard deviation of y is given by (5) (6) By using the above equations, we can obtain the predicted values (here the standard data) of the output (voltage) for the corresponding values of input (displacement) provided in Table 1. Table 1: Obtained Test Data and Predicted Standard Data Input Displacement (mm) 4.22 5 5.5 6 7 7.5 8 Experimental Test Data (volts) 0 0.63 1.18 1.37 2.1 2.69 3.03 Predicted Standard Data (volts) 0.03 0.64 1.04 1.43 2.22 2.62 3.01 From the above data, the characteristics (with test data and standard data) of the LVDT under test were obtained using Matlab 7.1. The characteristics are shown in Fig. 4 and Fig. 5. Fig. 3: The LVDT Trainer Kit From the obtained data, the best fit curve was done using linear regression equation. In linear regression (or simple regression) the relationship between the variables is assumed to be linear. The estimate of y (say y’) is obtained from an equation of the form (1) and the estimate of x ( say x’) from another equation (usually different from the former) of the form 116 International Journal of Electronics & Communication Technology Fig. 4: Experimental Test Data w w w. i j e c t. o r g ISSN : 2230-7109 (Online) | ISSN : 2230-9543 (Print) Fig. 5: Predicted Standard Test Data The algorithm in C language for the prediction of standard result is now converted to its corresponding .hex file, with the help of C 18 Tool Suite in MICROCHIP’S MPLAB IDE v8.92. The .hex file is burnt on the simulated model of PIC18F458 in Proteus Design Suite ISIS Professional v7.7SP2 and real time results are obtained. The standard output voltage in digital form for 8mm displacement is shown in fig. 6. IJECT Vol. 6, Issue 1, Spl-1 Jan - March 2015 1988. [2] Dolan B., Aschemann H.,“Control of a wind turbine – An extended linearization approach”, IEEE Xplore, March, 2012. [3] Bera S. C., Marick S.,“Study of a simple linearization technique of p-n junction- type anemometric flow sensor”, Vol. 61, No. 9 September 2012. [4] Pereira D., Girao S.,“Pdf- based progressive & smart sensors linearization”, Vol. 58, No. 9, September, 2009. [5] Sawhney A.K.,“Electrical & Electronics Measurement & Instrumentation”, Dhanpat Rai & Sons, 14th edition, 1998. [6] Mazidi A., Mckinlay, Causey,“PIC Microcontroller & Embedded Systems : Using Assembly & C for PIC 18”, Pearson 1st Edition, 2008 [7] Das N.G.,“Statistical Methods (Vol. 1)”, Tata Mcgrawhill Education Pvt. Ltd. 2009. Fig. 6: Simulated Result when input is 3.03V V. Conclusion From the results obtained it can be concluded that the “.hex” file generation by MPLAB software is successful. Self calibration of the LVDT under test is done satisfactorily for LVDT whose output is in the range of 0-5V. The DAC could not be incorporated in the model due to its unavailability in the simulation software, but the digital output is used manually to calculate the corresponding analog output. The proposed model can be designed in future so that it can incorporate input values greater than 5V. The proposed scheme for self calibrating LVDT can also be extended for other sensors having characteristics different from LVDT. VI. Acknowledgement The authors would like to extend their gratitude to the Department of AEIE, Supreme Knowledge Group of Institutions for providing the permission of conducting the experiment to obtain test data from LVDT trainer kit in their Sensors and Transducers laboratory. References [1] Patranabis, Ghosh, Bakshi,“Linearizing Transducer Characteristics”, Vol. 37, No. 1, IEEE Xplore, March, w w w. i j e c t. o r g International Journal of Electronics & Communication Technology 117