Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
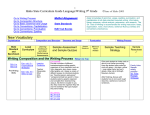
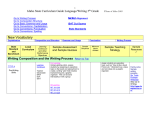
A Bayesian Approach for the Recognition of Control Chart Patterns M. Kabiri Naeini, M. S. Owlia*, M. S. Fallahnezhad Mehdi Kabiri Naeini is PhD student at the Department of Industrial Engineering, Yazd University, Yazd, Iran Mohammad Saleh Owlia is Associate Professor at the Department of Industrial Engineering, Yazd University, Yazd, Iran Mohammad Saber Fallahnezhad is Assistant Professor at the Department of Industrial Engineering, Yazd University, Yazd, Iran ABSTRACT In this research, an iterative approach is employed to recognize and classify control chart patterns. To do this, by taking new observations on the quality characteristic under consideration, the Maximum Likelihood Estimator of pattern parameters is first obtained and then the probability of each pattern is determined. Then using Bayes’ rule, probabilities are updated recursively. Finally, when one of the updated derived statistics falls outside the calculated control interval a pattern recognition signal is issued. The advantage of this approach comparing with other existing CCP recognition methods is that it has no need for training. Simulation results show the effectiveness and accuracy of the new method to detect the abnormal patterns as well as satisfactory results in the estimation of pattern parameters. KEYWORDS Control Chart Pattern Recognition Bayes' Rule Maximum Likelihood Estimation 1. Introduction Control chart pattern (CCP) recognition is one of the important tools in statistical process control (SPC) to identify process problems. The observed variation of quality characteristics generally results from either common causes or assignable causes. Common causes are considered to be due to the inherent nature of normal process and assignable causes occur when the process has been changed in materials, machines, operators etc. Assignable causes result in the unnatural variation to the process, which should be identified and eliminated as soon as possible. A normal (NOR) pattern indicates that the process is operating under natural variation. Unnatural variations are signaled mainly by exhibition of five types of unnatural patterns, i.e., cyclic (CYC), increasing trend (IT), (a) Normal (b) Cycle (c) Increasing Trend decreasing trend (DT), upward shift (US) and downward shift (DS) [1], as shown in Fig. 1. There are also other types of unnatural patterns which are either special forms of basic CCPs or mixed forms of two or more basic CCPs. Recognition of unnatural patterns is a crucial task in SPC for identifying underlying root causes. Traditionally, control chart patterns have been analyzed and interpreted manually. Over the years, many supplementary rules, like zone test or run rules have been developed to detect the CCPs [1, 2]. Artificial intelligence approaches, such as expert system, fuzzy logic and neural network have been introduced in some studies. Various kinds of expert systems have been proposed [3-6]. Some researchers [7, 8] have applied the concept of fuzzy sets and membership functions to detect unnatural patterns. Artificial neural network is the most popular pattern classifier [9, 10]. (d) Decreasing Trend (e) Upward Shift (f) Downward Shift Fig. 1. Six types of basic CCPs Some researchers used statistical methods based on correlation analysis for the problem of CCP recognition [11, 12]. In this research we introduce a new approach for CCP recognition. In this approach, in each iteration of data gathering process, using observation data, the parameters of each pattern are estimated and the probability of existence of each pattern is calculated and updated. Updating of probabilities is using a recursive equation based on Bayes’ Rule. We name the probabilities as belief. When one of the updated beliefs fell out of its calculated control limits, a pattern recognition signal i`s issued. *Email: [email protected] The rest of the paper is organized as follows: Section 2, introduces the procedure to estimate patterns parameters. In section 3, the probabilities and the recursive method to their improvement are first defined. Then we design the new CCP recognition method. Section 4 contains the performance evaluation of the proposed scheme using simulation experiments. Finally, the conclusions and recommendation for future research appear in section 5. For the sake of simplicity, assume only one single observation (n=1) is gathered on the quality characteristic of interest in each iteration of the data gathering process. At the tth iteration, let 3. The Proposed Method 3.1. Estimation of Patterns Parameters In the first step of presented method we obtain the Maximum Likelihood Estimator (MLE) of patterns parameters. Assume that the quality characteristic of interest follows a normal distribution with mean µ and variance σ2. The equations along with the corresponding parameters of the six basic CCPs are given in Tab. 1. Normal Cycle Trend (IT, DT) CCP parameter(s) Mean (μ) Standard deviation (σ) Amplitude (A) Period (T) Slope (k) beliefs based on the observation vector O t 1 and the new After taking a new observation, x t , let B i ( x t , O t 1 ) , denotes the CCP equation probability of existing pattern i in the process. xt = rt Now let B i ( x t 1 , O t - 2 ) denotes the prior probabilities of existing xt = rt+Asin(2πt/T) A, T >0 pattern i in the process, the posterior probabilities B i (O t ) can be determined by applying Bayes' rule, thus we have xt= rt+kt xt= rt+su(t) u(t)=1 if i≥P, else u(t)=0 Note: t = discrete time point at which the pattern is sampled (t = 1, 2, 3, …), rt = random value of a normal distribution with µ and σ2 at tth time point, and xt = sample value at tth time point. Shift (US, DS) iteration t, after taking a new observation x t , our aim is to improve observation x t . Tab. 1. Equations and parameters for control chart pattern simulation CCP O t ( x 1 , x 2 , ..., x t ) be a vector of observations on the quality characteristic of the current and the previous t-1 iterations. In Magnitude (s) Position (P) B i (O t ) B i ( x t , O t 1 ) Pr{Pattern i x t , O t 1 } Pr{Pattern i , x t O t 1 } Pr{x t O t 1 } Pr{Pattern i O t 1 } Pr{x t Pattern i , O t 1 } Pr{x t O t 1 } Using equations mentioned in Tab. 1, in case of each pattern, by subtracting the pattern part from the observation data, the remainder value is a normal random variable with known parameters µ and σ2, as presented in Eq. (1-4): rt = xt (1) rt = xt-kt (2) rt = xt-s (3) rt = xt-Asin(2πt/T) (4) By knowing the distribution of rt, parameters k, s, A and T can be estimated using a point estimation technique like maximum likelihood estimation. MLE of parameters k, s and A has been determined in Eq. (5-7) as follows: kˆ 2 ( n 1) (x ) (5) sˆ x (6) sin(2 t / Tˆ )( x t ) t 1 n Aˆ recursive equation. B i ( x t , O t 1 ) In 2 To determine Aˆ , first we need to calculate Tˆ by solving the Eq. (8). t cos(2 t / Tˆ )( x t t 1 n j 1 Pr{Pattern j O t 1 } Pr{x t Pattern j } B i ( x t 1 , O t 2 ) Pr{x t Pattern i } 4 j 1 sin(2 t / Tˆ )(x ) sin(2 t / Tˆ )) 0 sin (2 t / Tˆ ) t 1 n t (8) 2 t 1 A numerical search procedure by testing the values of 4, 5, …, 20 for Tˆ is used to solve Eq. (8). The value of Tˆ that makes the right hand side of Eq. (8) positive minimum is the solution of this equation. 3.2. Probabilities and the approach to their improvement In the second step of presented method, it is needed to calculate the probability of existence for each pattern. The pattern that has the greatest probability of existence, belief, is candidate to be selected. In each iteration of data gathering process beliefs are calculated and updated using a recursive equation based on Bayes’ Rule. (9) B j ( x t 1 , O j ,t 2 ) Pr{x t Pattern j } Eq. (9), we need to evaluate the probability Pr{x t Pattern i , O t 1 } Pr{x t Pattern i } . When pattern i exists in the process then rik are independent variables with standard normal distribution. Hence by assuming the existence of pattern i in the process, we have: ( rit ) / 2 2 Pr{rit Pattern i }=(1/ 2 )e n Pr{Pattern i O t 1 } Pr{x t Pattern i } 4 (7) sin (2 t / Tˆ ) t 1 n Thus the beliefs B ( x t , O t -1 ) can be determined by the following (10) 3.3. Pattern recognition (stopping condition) In each iteration, beliefs are updated and when one of the updated beliefs falls outside the calculated control interval a pattern recognition signal is issued. To calculate the control limits, assume two biggest values of beliefs are B g 1 (O t ) and B g 2 (O t ) . Thus we have ( rg 1,t ) / 2 2 Pr{rg 1,t Pattern g 1 } (1/ 2 )e Pr{rg 2 ,t Pattern g 2 } (1/ 2 )e ( rg 2 ,t ) / 2 2 Then by defining the statistic Z t B g 1 (Ot ) Zt (11) B g 2 (O t ) The recursive equation will be Zt e ( rg 1,t ) / 2 ( rg 2 ,t ) / 2 2 e should be in the interval ( 2c , 2c ) to be 2t accepted as an in control variable. Hence we have Z t 1 2 ln Z t ( rg 1,t ) / 2 ( rg 2 ,t ) / 2 2 2 If normal pattern existed in the process then estimations of all pattern parameters are approximately equal to zero and therefore all rit approximately follow standard normal distribution hence we conclude that random variables ( rg 1,t ) and ( rg 2 ,t ) 2 2 follow a chi-square distribution with one degree of freedom. Thus we have 1 1 ln Z t ln Z t 1 Z t 1 2 ( rg 1,t ) 2 1 2 ( rg 2 ,t ) 2 2 tc ) 1 B g 1 (O 0 ) 2 2 2 one and it never falls out of the control limits. Hence we assume that if for a predetermined value like q of sample observations, they all fall in the control limits, we conclude that no pattern exists in the process and it is in state of normal. The parameters c and q are adjusted through experiment. 1 Thus we have 1 2 ( 1 (t ) 2 (t )) 2 (12) 2 1 (t ) t 2 (t ) t follow standard normal distribution. Now 2t 2t from Eq. (12) we have 4 j 1 ( rit )2 / 2 2 )e B j ,t 1 (1 / , the belief statistic ( r jt )2 / 2 ,will be updated. statistic of Z t is obtained. Step 6: If t is smaller than q and the statistic of Z t is in the control 1 1 (t ) t 2 (t ) t ( ). 2t 2 2t 2t 2 2 1 (t ) t 2 ( B i ,t 2 )e B i ,t 1 (1 / rit Step 5: By selecting two biggest beliefs ( B g 1,t and B g 2 ,t ), the 2 , Step 4: For each pattern, using 2 variances equal to 2t thus for sufficiently large t according to the Central Limit Theorem it is concluded that random variables 2 ln Z t ( B 1, 0 B 2 , 0 B 3, 0 B 4 , 0 0.25 ). determine the residual, rit (Eq. (1-4)). 2 Since random variables 1 (t ), 2 (t ) have mean equal to t and 2 Steps of the proposed method are as follow: Step 0: Set the probabilities of each patterns as equal Step 1: In iteration t get the new observation. Step 2: Using t observations and according to Eq. (5-8), estimate the patterns parameters. Step 3: For each pattern, using estimated parameters in step 2, B g 2 (O 0 ) ln Z t approximately the same and the values of Z t will be approximately Z t falls out of the derived control limits, a pattern signal is issued. ( 1 (t ) 2 (t )) have equal values 0.25 hence ln Z t Consequently the values of B g 1 (Ot ) and B g 2 (Ot ) will be In the proposed approach, a recursive equation is used to update the probability of each pattern. Then, when the defined statistic of For the initial values of B i (O0 ) i=1,2,3,4 it is assumed that they 2t 2 (t ) t 1 (t ) t interval (e tc ,e tc ) , go to step 1. Step 7: If t is smaller than q and the statistic of Z t is not in the 2 (t ) t ) 13 2t 2 2 2t 2 Since ( ,e pattern gr exists in the process. When no pattern exists in the process, the estimated values for parameters of each pattern will be approximately zero thus the values of random part for each pattern will be approximately equal. 2 ln Z t ln Z 0 tc 3.4. The Algorithm of proposed method ( 1 (1) 2 (1)) 2 So we have Z0 If statistic Z t falls out of these control limits, we conclude that In other words Zt 1 1 2 2 ln ln Z t ln Z t 1 ( rgr ,t ) ( rsm ,t ) Z t 1 2 2 Zt ( 2c , 2c ) Z t (e 2t Z t 1 ln 2 ln Z t variables 2 Hence Zt random variables, will be ( 2c , 2c ) .Where c is the parameter of control chart. Now from Eq. (13) it is concluded that random ) follows a normal distribution with 2t 2t mean 0 and variance 2, the standard control charting limits for these tc tc ,e ) , existence of pattern g1 is signaled control interval (e and decision making process ends. Step 8: If t is greater than q, the process is in state of normal. (c and q are constants and the best combination of them could generally be obtained by simulation experiments.) 4. The Testing Procedure Start (t=0) B1,0=B2,0=B3,0=B4,0=0.25 t=t+1 t>q Yes Process is in state of normal No Receive new observation xt Estimate the patterns parameters Calculate the rit Since using real pattern data is difficult and economically unjustifiable, a common approach adopted by most researchers is using simulated data for developing and validating a CCP recognizer. Using MATLAB 2008, we generated 60000 (10000×6) pattern data for testing the presented method. Recognition accuracy of presented method is introduced through confusion matrix in Tab. 2. It can be seen that there is a tendency for the trend patterns to be mostly confused with shift. The presented recognizer misclassifies about 1.6% of trend patterns as shift patterns. Shift patterns are the hardest to be classified (97.69%). Results for classification of normal patterns (98.80%) suggest that the type I error probability for proposed recognizer does not seem to be very good. Recognition accuracy is governed by the slope for the trend, the magnitude for the shift pattern and the amplitude for the cycle. There is a much higher probability for the proposed method to recognize cycle patterns with small amplitude as normal patterns. Small standard deviation of correct recognition percentage implies that presented recognizer has a good predictive consistency. Pattern average run length (PARL) is another performance criteria used to evaluate the recognition speed of presented method. PARL is the average number of observations that must be taken before an a recognition signal. To get PARL of each pattern, the mean of 10000 run length was calculated. Compared with the results from Guh 2002 [13] and Gauri 2009 [14], it can be seen that presented method obviously has better RA for six patterns all above 0.97. Also from the experiment results of the PARL calculation, it can be concluded that presented pattern recognizer has a faster recognition speed than the traditional Shewhart control chart. PARLs of method are introduced in Tab. 3. Tab. 2. Confusion matrix For each pattern i, and using rit update Bit Find Bgr,t and Bsm,t and calculate Zt e-ct˄0.5 <Zt<e-ct˄0.5 Normal Trend Shift Cycle Normal 0.9880 0 0.0001 0.0119 t=0.1 Trend 0.0001 0.9773 0.0158 0.0068 s=1.5 Shift 0.0074 0.0026 0.9769 0.0131 A=1.5, T=8 Cycle 0.0002 0 0 0.9998 c=1.5, q=50 Tab. 3. Comparison of recognition accuracy Pattern RA of presented method RA from R.S. Guh [13] RA from S.K. Gauri [14] Normal Trend Shift Cycle 0.9880 0.9773 0.9769 0.9998 - 0.86 0.90 0.92 0.9362 0.8948 0.8442 0.9638 No Tab. 4. PARL and standard error Process is in state of pattern gr. c=1.5, q=50 Stop Fig. 2. Flowchart of proposed method PARL Standard Error 50.7 Normal 50.4 t=0.1 Trend 27.3 4.8 s=1.5 Shift 16.3 18.3 A=1.5, T=8 Cycle 22.4 75.6 5. Discussion Recognition accuracy of method is governed by the pattern parameters (slope for the trend pattern, magnitude for the shift pattern and the amplitude and the period for the cycle). For example there is a much higher probability for the proposed method to recognize cycle patterns with small amplitude as normal. It is assumed that the process follows normal distribution. In practice it is possible that observations follow any other distribution. In this case we have two alternative solutions: 1. We can use subgroups for data gathering and then calculate the average value of observations in each subgroup that follows normal distribution according to the Central Limit Theorem. 2. We can estimate the pattern parameters by applying the maximum likelihood method on the regarding probability distribution. [4] [5] [6] [7] [8] 6. Conclusions This paper described a new statistical approach for recognizing control chart patterns and estimating the patterns parameters. The proposed methodology employs an iterative approach based on Maximum Likelihood Estimator and Bayesian inference. This method starts out with defining measures called beliefs, and subsequently the beliefs in the process to be in state of each patterns, are updated by taking new observations on the quality characteristic under study. This method employs Bayes’ rule for continuously updating the knowledge about the state of the process. Then by means of a control charting method when the stopping condition is met, the process is determined to be in state of signaled pattern. The obtained results from simulation experiments have shown the effectiveness of proposed approach. The proposed framework gives highly accurate results to detect the abnormal patterns and satisfactory results in estimation of patterns parameters. Compared with neural-based methods, recognition results reached by this system are not based on training samples and will be more reliable than that reached by neural networks. Second, when compared with Bayesian techniques, this approach requires no assumptions about probability distributions functions of the unnatural patterns classes. There are several directions for future research: Determining the optimum control threshold of the beliefs is an interesting subject for research. Only six types of control chart patterns were studied in this research. In case of the other patterns such as systematic, stratification, the performance of method could be studied. The effect of patterns parameters magnitude, in the performance of method is another research direction. Some techniques (e.g. wavelet analysis) could be joined to this method to improve its discriminating ability. Acknowledgment The authors gratefully acknowledge the helpful comments and suggestions of the reviewers, which have improved the presentation. References [1] [2] [3] Western Electric, Statistical Quality Control Handbook, Indianapolis: Western Electric Company, 1958. L. S. Nelson, “The Shewhart control chart – test for special causes,” Journal of Quality Technology, Vol. 16, 1984, PP. 237-239. J. R. Evans, W. M. Lindsay, “A framework for expert system [9] [10] [11] [12] [13] [14] development in statistical quality control,” Computers and Industrial Engineering, Vol. 14, 1988, PP. 335-343. D. T Pham, E. Oztemel, “XPC: an on-line expert system for statistical quality control,” International Journal of Production Research, Vol. 30, 1992, PP. 2857-2872. C. S. Cheng, N. F. Hubele, “Design of Knowledge-Based Expert System for Statistical Process Control,” Computers and Industrial Engineering, Vol. 22, No. 4, 1992, PP. 501-517. J. A. Swift, J. H. Mize, “Out-of-control pattern recognition and analysis for quality control charts using LISP-based systems,” Computers and Industrial Engineering, Vol. 28, 1995, PP. 81-91. M. S. Yang, J. H. Yang, “A fuzzy-soft learning vector quantization for control chart pattern recognition,” International Journal of Production Research, Vol. 40, 2002, PP. 2721-2731. M. H. F. Zarandi, A. Alaeddini, I. B. Turksen, “A hybrid fuzzy adaptive sampling – run rules for Shewhart control charts,” Information Sciences, Vol. 178, 2008, PP. 1152-1170. H. B. Hwarng, N. F. Hubele, “Back-propagation pattern recognizers for X control charts: methodology and performance,” Computers and Industrial Engineering, Vol. 24, 1993, PP. 219-235. C. S. Cheng, “A neural network approach for the analysis of control chart patterns,” International Journal of Production Research, Vol. 35, No. 3, 1997, PP. 667-697. A. M. Al-Ghanim, S. J. Kamat, “Unnatural pattern recognition on control charts using correlation analysis techniques,” Computers & Industrial Engineering, Vol. 29, 1995, PP. 43-47. J. H. Yang, M. S. Yang, “A control chart pattern recognition scheme using a statistical correlation coefficient method,” Computers & Industrial Engineering, Vol. 48, 2005, PP. 205-221. R. S. Guh, “Robustness of the neural network based control chart pattern recognition system to nonnormality”, International Journal of Quality & Reliability Management, Vol. 19(1), 2002, PP. 97-112. S. K. Gauri, “Control chart pattern recognition using feature-based learning vector quantization”, International Journal of Advanced Manufacturing Technology, 2009.