Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Distributed control system wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Electrical substation wikipedia , lookup
Current source wikipedia , lookup
History of electric power transmission wikipedia , lookup
Electrification wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Power inverter wikipedia , lookup
Three-phase electric power wikipedia , lookup
Control theory wikipedia , lookup
Commutator (electric) wikipedia , lookup
Power engineering wikipedia , lookup
Resilient control systems wikipedia , lookup
Control system wikipedia , lookup
Stray voltage wikipedia , lookup
Surge protector wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Opto-isolator wikipedia , lookup
Electric motor wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Power electronics wikipedia , lookup
Dynamometer wikipedia , lookup
Distribution management system wikipedia , lookup
Mains electricity wikipedia , lookup
Buck converter wikipedia , lookup
Voltage optimisation wikipedia , lookup
Alternating current wikipedia , lookup
Induction motor wikipedia , lookup
Stepper motor wikipedia , lookup
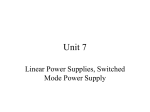
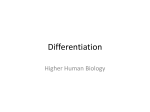
THE CONTROL OF SWITCHED RELUCTANCE DRIVES ELEONORA DARIE 1, EMANUEL DARIE 2 Key words: Switched reluctance machines, Generator, Flywheel storage, Drive control. This work describes the aspects of the topology and control of a switched reluctance drive are considered and compared with the topology and control of conventional AC drives. The focus herein lies on the control of switched reluctance drives. The switched reluctance drive is necessary for a flywheel energy storage system for use in for instance an UPS. It is shown that for this application, switched reluctance drives have some essential advantages compared to conventional AC drives. 1. INTRODUCTION The switched reluctance machine drives have gained considerable attention among researchers due to several reasons. First of all, the rotor construction is simple and robust, as it consists of pure (laminated) steel with neither permanent magnets, nor electrical windings, while the stator can be easily manufactured as the windings are not distributed but concentrated around the salient poles. Secondly, the machine is cost-effective in comparison with induction machines, while it is claimed to have a comparable or even higher efficiency and power to volume ratio. In this work, the main aspects of principal operation, inverter topology and control of switched reluctance machines are reviewed. Also, the use of the switched reluctance machine as a generator is considered and for this purpose a short review of publications in this matter is performed. Finally, the application in a flywheel energy storage system is considered and it is shown that this application permits to exploit most of its specific advantages. In a switched reluctance machine, only the stator presents windings, while the rotor is made by steel laminations without conductors or permanent magnets. The switched reluctance machine motion is produced by the variable reluctance in the air grip between the rotor and the stator. 1 ) Technical University of Civil Engineering, Bucharest, Pache Protopopescu 66, Sector 2, e-mail: [email protected]. 2 ) Police Academy, Bucharest, Privighetorilor 1-2, Sector 1, e-mail: [email protected] Rev. Roum. Sci. Techn.– Électrotechn. et Énerg., 49, 4, p. , Bucarest, 2004 Eleonora Darie, Emanuel Darie 2. PRINCIPLE OPERATION OF SWITCHED RELUCTANCE MAHINES Although switched reluctance machines are in fact synchronous machines, their operation and control differs fundamentally from conventional rotating-field AC machines, such as induction or permanent magnet synchronous machines. 2.1. TORQUE DEVELOPMENT Torque production in reluctance machines is achieved by the tendency of the rotor to move to a position where the inductance, and hence the magnetic field energy, of the excited winding is minimized [1]. An example of a 6/4 switched reluctance machine is shown in fig. 1. This three-phase machine is denoted 6/4 because it has six stator and four rotor poles. In the position shown, the resulting torque tends to rotate the rotor in clockwise direction towards the aligned position. If the rotor continues past the aligned position, due to its inertia, the attractive force between the poles produces a braking torque. To eliminate this negative torque, the current must be switched off while the poles are separating. The ideal current waveform is therefore a series of pulses synchronized with aligning rotor poles and stator poles. By exciting the stator windings of the different phases each time two rotor poles approach the appropriate stator poles, a continuous torque production and rotation of the rotor is achieved. In generator mode, windings are excited during the separation of the respective poles, yielding a braking attraction. The requirement for an optimized current shape makes it impossible to run such a machine directly from the grid. A power electronic inverter with a control based on feedback of the rotor position is a necessity. Fig. 1 – The 6/4 switched reluctance machine with one phase excited. 3 The control of switched reluctance drives 2.2. CIRCUIT EQUATIONS The general voltage equation of an electrical coil with a resistance R and with Ψ(t) representing the instantaneous flux coupled with this coil, can be written as: u = R ⋅ i (t ) + d Ψ (t ) dt (1) while, in case of a switched reluctance machine the inductance L is a complex function of position and (through the non-linear ferromagnetic hysteresis phenomenon) current: Ψ (t ) = L ⋅ (i (t ),θ (t )) ⋅ i (t ) , dθ =ω m dt (2) where θ is the mechanical angle of the rotor position and ω m is the rotational speed. Using (1) and (2), the dynamic phase voltage equation of a switched reluctance machine with the rotor position θ and the rotational speed ω m , neglecting mutual coupling effects, can be stated as follows: ∂L(i,θ ) d i ∂L(i, θ ) u ph = R ⋅ i (t ) + L(t ) + i (t ) + i (t ) ⋅ ⋅ω m ∂i d t ∂θ (3) The last term is the back electromotive force (emf) e of the switched reluctance machine: e =ω m ⋅ i ⋅ ∂L(i, θ ) ∂θ (4) Hence, the induced voltage contains information about the rotor position. This property can be exploited for position feedback without a shaft sensor. Eleonora Darie, Emanuel Darie With constant current, (4) is linked to both increase in magnetic field energy and produced mechanical power. In unsaturated conditions, both terms equal each other, and torque can be expressed as: T= i 2 ∂ L (i , θ ) ⋅ 2 ∂θ (5) ∂L > 0 the torque is positive and electrical power is converted into ∂θ ∂L mechanical output (motoring), while when < 0 the torque is negative and ∂θ mechanical power is converted into electrical power (generating). Note that the produced torque is independent of the direction of the current, since i 2 is always positive. With the machine driven in saturation, although (5) being no longer valid, these conclusions remain true. When 3. INVERTER TOPOLOGY As torque is independent of the direction of the current, the flux-linkage and the current, as well as the topology of the inverter circuit, may be unipolar. This mode of operation is preferred because it permits a simpler form of controller. However, to be able to switch off the current while the poles are aligned (in motoring mode), a negative voltage must be applied to enforce this fast current change in the relatively large inductance of the pole winding. The half-bridge phase can supply current in only one direction. This circuit is capable of operating the machine as a motor and generator. Several other circuits are possible besides, using less power electronic switches and employ various means to produce the reversed voltage [2]-[6]. However, in general these circuits either compromise the performance of the machine or require additional components, while the faulttolerant operation, more in particular the impossibility to have a shoot-through, of the drive is destroyed. 4. CONTROL OF THE SWITCED RELUCTANCE MOTOR The control of electrical machines is typically achieved through several control loops. Fig. 2 shows the basic control scheme of a servo drive [1]. The outer control loops are generally similar for all drive types, while the inner torque loop differs in switched reluctance machines fundamentally from other electrical The control of switched reluctance drives 5 machines. Much of the classical theory of torque control in electric drives is based on the DC machine, in which torque is proportional to flux multiplied by current. The flux and current are controlled independently, be it through mathematical transformations in AC field-oriented control. Generally speaking, in classical DC and AC machines, the flux is maintained constant while the current is varied in response to the torque demand. In switched reluctance machines, unfortunately, there is no straightforward equivalent of field-oriented control. Pulses of phase current, synchronized with the rotor position, produce torque in the switched reluctance machine. The flux in each phase must usually be built up from zero and returned to zero each stroke. The inner torque loop consists of controlling timing and regulation of these pulses. Usually there is no torque sensor and therefore the torque control loop is not closed. Because the switched reluctance motor drive cannot be characterized by a simple torque constant kT (torque/ampere), smooth torque control must be achieved through feed-forward torque control algorithms, incorporating some kind of motor model. The fact that the machine inductance is not only dependent on the rotor position, but also on the excitation current, complicates the development of control strategies for switched reluctance machine drive systems. For all other electrical machines, control strategies are derived based on the machine parameters being constant for most of the excitation range [1], [4]. m* + Position Control _ m* Velocity Control T * Torque Control Motor + Load m Motor velocity Shaft position Fig. 2 Servo drive control system 4.1. LOW-SPEED CONTROL: CHOPPING At lower speeds, the current is regulated either by pulse width modulation (PWM)-voltage or direct instantaneous current regulation (e.g. hysteresis band current control). The phase voltage is switched between -UDC and +UDC (hardchopping) or between zero and +UDC (soft-chopping). As speed increases also the firing or commutation angles (turn-on and turn-off angles) of the commutation cycle are advanced. The turn-on angle must be advanced to be able to build up the flux from zero to the desired value before the inductance starts rising (approaching of poles). Eleonora Darie, Emanuel Darie 4.2. HIGH-SPEED CONTROL: SINGLE-PULSE OPERATION As speed increases, the back-emf e increases according to (4). The speed for which e equals UDC is called base speed [3]. At speeds higher than this base speed, there is insufficient voltage available to control the current. Timing of current pulses can then only control the current. This control mode is called single-pulse mode. 5. SWITCHED RELUCTANCE MACHINE AS A GENERATOR 5.1. CURRENT CONTROL Current control of the switched reluctance machine in generating is identical to motoring mode. The only difference is timing of current pulses. While in motoring mode the windings are excited during rising inductance (approaching of poles), in generating mode each winding is excited while the poles separate from each other. The objective of the generator control is normally to keep the DC-link voltage at the desired value. Unlike field-oriented AC machines, power generation is not continuous but pulse-wise. A DC-link capacitor must be retained to provide excitation power during the fluxing interval, more in particular during the first part of each stroke. The ratio between excitation energy and generated energy is called the excitation penalty: ε= Pin , elec. Pout , elec. (6) The DC-link voltage decreases during the fluxing interval, and increases during the de-fluxing interval. The variation or ripple in the DC-link voltage depends on the energy needed to build up the flux each stroke and the DC-link capacitance. The essence of its instability is the proportionality of the excitation power to the back- electromotive force (emf). If the load is too small, the DC-link voltage rises exponentially towards infinity, and if the load is too large, the DClink voltage falls towards zero. For this reason it is necessary to feedback the DClink voltage or to control the average output current independently of the DC-link voltage. The controller must maintain the average DC-link voltage constant in much the same way as it must maintain a constant average torque in motoring mode. However, the DC-link capacitance has an integrating or smoothing effect such that it requires a lower bandwidth to control the DC voltage than to control the torque [1]. 7 The control of switched reluctance drives Although relatively little has been reported on the design of the switched reluctance generator controller, there is a broad variety in the proposed controller schemes [1]. At lower speeds, the current pulses are controlled by chopping the voltage between zero and -UDC,, or between +UDC and -UDC with fixed commutation angles. The control is similar to the current chopping control in motoring mode. At higher speeds the generator is operated in single-pulse mode. Adapting the commutation angles regulates the current. As the speed increases, also the amplitude of the negative back emf increases and may become larger than the negative supply voltage. In this case an uncontrollable rise of the phase current occurs. To avoid over-current conditions and torque pulsations, the control angles have to be retarded as a function of the DC-link voltage as well as of the speed. Measuring the variation of the DC-link voltage is necessary to avoid unstable operating conditions. It is shown that maximum energy conversion is obtained when back-emf and UDC are in balance. This balance is achieved through adaptation of the firing angles and variation of the DC-bus voltage in proportion to the speed. The drawback of this method is the necessity of a step-down DC/DC converter in order to achieve a constant output voltage. 5.2. START-UP Since the switched reluctance machine is singly excited, like the induction machine, a DC source is necessary during start-up from cold, i.e. with the machine not magnetized and no voltage on the DC-link capacitor. Once started, the system is self-sustaining in its reactive power and the DC source can be disconnected. The efficiency of the switched reluctance generator is very similar to the efficiency of the switched reluctance motor. The main difference is that the losses in the converter can be reduced as in the generator, the bulk of the current flows through the diodes having in general less conducting losses than the switching devices. 6. APPLICATION IN FLYWHEEL ENERGY STORAGE In flywheel energy storage, electrical energy is stored in the form of kinetic energy. As the amount of stored energy is proportional to the square of the rotation speed, a high-speed, low-loss operation is desired. In view of its application in for instance an uninterruptible power supply system (UPS) or a dynamic voltage restorer (DVR), reliability and immediate and fast energy transfer is key. Hence, primary requirements for the motor/generator of a flywheel energy storage system can be summarized as: high output power capability, fast response on sudden energy demand (for example when a voltage dip occurs), ability of the rotor to withstand high speeds, ability of the rotor to operate in vacuum with adequate Eleonora Darie, Emanuel Darie thermal management (that is little or no heat generation in rotor), negligible zerotorque spinning losses, high reliability, high efficiency and low cost. Switched reluctance machines have the following advantages over permanent magnet synchronous machines: there is no concern with demagnetization; hence switched reluctance machines are inherently more reliable than permanent magnet machines, there need not be an excitation field at zero torque, thus eliminating electromagnetic spinning losses, switched reluctance machine rotors are constructed entirely from high-strength low-cost materials. A comparison between induction machines and switched reluctance machines is less simple: because of the absence of currents flowing in the rotor, there are no Joule-losses in the rotor, on the other hand eddy current and hysteresis losses might be higher, efficiency, speed-range, power density and cost are comparable, but often in slight favor of the switched reluctance machine, the inverter topology of a switched reluctance drive is inherently more fault-tolerant because of the absence of shoot-through possibility. Disadvantages of the switched reluctance machine drive are its rather complex control. 7. CONCLUSIONS The basic operation of a switched reluctance machine is reviewed for the motor as well the generator operation; thereby illustrating its advantages over other types of standard AC drives. The four-quadrant operation is appropriate for the operation as a flywheel energy storage. It is especially very useful for highspeed operation due to its mechanical properties and low losses. REFERENCES 1.D. E. Cameron, J. H. Lang, The Control of High-Speed Variable-Reluctance Generators in Electric Power Systems, IEEE Transaction on Industry Applications, 29, 6, pp. 1106-1109, (1993). 2. S. Vukosavic, V.R. Stefanovic, SRM Inverter Topologies: A Comparative Evaluation, IEEE Transaction on Industry Applications, 27, 6, pp. 1034-47, (1991). 3. P. C. Kjaer, C. Cossar, Switched Reluctance Generator Control using an Inverse Machine Model, International Conference on Electrical Machines, Proceedings, pp. 380-385 (1994). 4. T. Sawata, P. C. Kjaer, T. J. E. Miller, A Control Strategy for the Switched Reluctance Generator, Conference on Electrical Machines, Proceedings, 3, pp. 2131-2136 (1998) 5. Eleonora Darie, E. Darie, Linear and non-linear Model Simulation of a Switched Reluctance Motor, Buletinul Institutului Politehnic din Iaşi, Tomul L(LIV) Fasc. 5, pag. 1275-1279, (2004). 6.W. F. Ray, M. T. Ebrahim, A novel high speed switched reluctance generator, European Conference on Power Electronics and Applications, Proceedings, 3, pp. 811-816 (1995).