Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Variable-frequency drive wikipedia , lookup
Spectrum analyzer wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Alternating current wikipedia , lookup
Buck converter wikipedia , lookup
Sound level meter wikipedia , lookup
Opto-isolator wikipedia , lookup
Three-phase electric power wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Utility frequency wikipedia , lookup
Rectiverter wikipedia , lookup
Chirp spectrum wikipedia , lookup
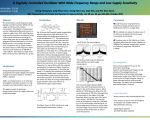
1160 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 41, NO. 5, MAY 2006 A Digitally Controlled Oscillator System for SAW-Less Transmitters in Cellular Handsets Chih-Ming Hung, Member, IEEE, Robert Bogdan Staszewski, Senior Member, IEEE, Nathen Barton, Meng-Chang Lee, Member, IEEE, and Dirk Leipold Abstract—A complete digitally controlled oscillator (DCO) system for mobile phones is presented with a comprehensive study. The DCO is part of a single-chip fully compliant quad-band GSM transceiver realized in a 90-nm digital CMOS process. By operating the DCO at a 4 GSM low-band frequency followed by and frequency dividers, the requirement of on-chip inductor the amount of gate oxide stress are relaxed. It was found that a dynamic divider is needed for stringent TX output phase noise while a source-coupled-logic divider can be used for RX to save power. Both dividers are capable of producing a tight relation between four quadrature output phases at low voltage and low power. Frequency tuning is achieved through digital control of the varactors which serve as an RF DAC. Combining a MIM capacitor array and two nMOS transistor arrays of the varactors for the RF DAC, a highly linear oscillator gain which is also insensitive to process shift is achieved. The finest varactor step size is 12 kHz at the 1.6–2.0 GHz output. With a sigma-delta dithering, high frequency resolution is obtained while having negligible phase noise degradation. The measured phase noise of 167 dBc/Hz at 20 MHz offset from 915 MHz carrier and frequency tuning range of 24.5% proves that this DCO system can be used in SAW-less quad-band transmitters for mobile phones. Index Terms—Cellular phone, channel hot carrier (CHC), deepsubmicron CMOS, digitally controlled oscillator (DCO), electromigration (EM), gate-oxide reliability, GSM, mobile phone, quantization noise, sigma-delta modulator, varactor, voltage-controlled oscillator (VCO). I. INTRODUCTION HE cellular phone industry recently has been growing explosively. A cellular phone nowadays is not only an air modem but integrates a variety of applications such as gaming, e-mail, video streaming, and PDAs. As a result, the RF IC becomes only a small portion of the phone and the cost of RF functions is driven down more than ever. In order to reduce cost, achieving a higher level integration for system-on-chip (SoC) is demanded so that power consumption, bill-of-materials such as pin count, external component count and PCB area, etc. are minimized. That is, RF functions such as RF oscillators need to be realized together with digital signal processors (DSPs), memory, digital baseband, analog baseband and power management without any additional masks for analog extensions in a CMOS process. However, what is advantageous to a DSP in a digital CMOS process, such as low voltage and thin metal interconnects, is disadvantageous to RF circuits due to reduced T Manuscript received September 26, 2005; revised December 22, 2005. The authors are with the Digital RF Processor (DRP ™) Department, Wireless Analog Technology Center, Texas Instruments, Inc., Dallas, TX 75243 USA (e-mail: [email protected]). Digital Object Identifier 10.1109/JSSC.2006.872739 voltage headroom, low inductor , and reduced gate oxide reliability. Furthermore, to eliminate transmitter (TX) surfaceacoustic-wave (SAW) filters, the stringent requirement such as GSM TX noise emission in receiver (RX) bands is now directly applied to the TX local oscillator (LO). To alleviate these constraints, one approach is to realize as many traditional analog functions as possible by digital logic gates. As a result, the difficulties of implementing analog functions in a nanometer-scale CMOS process are greatly reduced. Instead, now, the newly implemented analog functions using digital logic gates can take full advantage of CMOS process scaling. In this paper, we present an RF digitally controlled oscillator (DCO) system [1], [2] which can be directly connected to an all-digital phase-locked loop (ADPLL) [3] with a straight digital interface while satisfying the stringent GSM phase noise requirements and covering all GSM quad-band frequencies between 824 and 1990 MHz without any external SAW filter. The DCO system contains an oscillator core, two transmit and two receive frequency dividers as well as several clock buffers. Since at present, not every analog function in the transmit system is implemented with digital logic gates, many common questions on the analog-digital interface arise. In the rest of the paper, the analog-digital interface will be described in detail including the RF DAC characteristics, phase noise due to DAC quantization noise, spurs due to digital signal processing, and how a very fine frequency step is achieved with the DCO. In addition, reliability concerns such as gate oxide integrity (GOI), channel hot carrier (CHC) and metal electromigration (EM), as well as the output buffer serving as a pre-power-amplifier (PPA) will also be discussed. II. OVERVIEW OF THE DCO SYSTEM Shown in Fig. 1(a) is the DCO system. The DCO ASIC cell is built with only digital I/Os even for the RF outputs at PCS band and ) (1900 MHz) since 10%–90% rise and fall time of an inverter buffer in a 90-nm CMOS process is 40 ps. The DCO ASIC cell contains a DCO core oscillating at 2 GSM high-band (HB) frequencies, and frequency dividers for generating TX RF outputs and LO signals for RX mixers. Since GSM is a half-duplex system, with a proper frequency planning, all GSM quad bands can be covered with one single DCO core as long as it has a 18.8% tuning range covering the frequencies between 3296 and 3980 MHz. With a reasonable margin, realistically, 25% of frequency tuning range is required to cover all four GSM frequency bands. Although it is typically a tradeoff between phase noise and frequency tuning range, in order to eliminate the need of an external TX SAW filter, the phase noise 162 dBc/Hz at 20-MHz offsets from all still needs to be 0018-9200/$20.00 © 2006 IEEE Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. HUNG et al.: DCO SYSTEM FOR SAW-LESS TRANSMITTERS IN CELLULAR HANDSETS Fig. 1. (a) DCO system, containing a DCO core, frequency dividers, and buffers for both TX RF outputs and RX quadrature LOs. (b) DCO system including the DCO ASIC cell and the input interface digital logic. EGSM (GSM900) TX channels while satisfying the wide frequency tuning range. As described in [4], typical difficulties of designing an RF local oscillator for SAW-less and quad-band GSM TX are the and the wide tuning range, where low integrated inductor the two performance parameters are commonly conflicting with each other. Especially when using a standard digital CMOS process which is optimized for digital logic speed, the metal thickness and interconnect parasitic capacitance are typically small resulting in a very high metal sheet resistance even though the metal is made of copper. Hence, a typical inductor of 3.6 at 0.9 GHz is only 30% of that reported recently with an excellent 3-MHz offset phase noise [5]. Furthermore, to be able to utilize a single DCO for all four GSM frequency bands, the inductance of the LC tank must be reduced making it even more difficult for the DCO to achieve low phase noise. To overcome the obstacles surrounding the inductor and the LC tank characteristics, it is instructive to revisit a phase noise theory such as the well-known Leeson’s model [6]. For sim, where plicity, assuming inductor quality factor is the operating frequency, is the series inductance, and is the parasitic series resistance. The Leeson’s phase noise model can be rewritten as (1) 1161 and are noise transfer function and total noise where are power injected into the LC tank, respectively; and current consumption and voltage amplitude of the DCO, reand are resonant frequency of DCO core spectively; , respectively; is the amplifier and frequency offset from noise factor; and are the tank quality factor and equivalent parallel tank resistance, respectively. Referring to GSM900 fre, if was increased from to , the quencies as product for the tank needed to be decreased to 1/16 of its original value. Again, for simplicity, assuming that , , and are constant, and tank , from (1), increasing from to would increase and by four times, resulting in a 6-dB phase noise improvement. may be reduced to decrease The larger also implies that the noise factor , further improving the phase noise. After the DCO, the 4 stage will, in addition, improve phase noise by 12 dB if DCO noise dominates the overall system. There is al. For a ways a concern of tuning range when increasing and , if decreased by a factor of , would stay given constant but would also decrease by a factor of , resulting in a worse phase noise. In this work, was minimized with a constraint of tuning range. The challenging phase noise requirement still remains but now moves to frequency dividers. However, it is somewhat easier to design a low-noise divider than a DCO under the process limitations. Consequently, the 162 dBc/Hz far-out becomes achievable. Using dividers to phase noise from for GSM/EGSM bands and for generate quadrature DCS/PCS bands from a DCO core also has a great benefit of consuming a much less current and die area compared to those using two oscillators or RC-CR networks. Since the DCO core takes straight digital outputs from the ADPLL, it needs to have a built-in RF DAC function. There are four input data buses comprising the raw oscillator tuning word (OTW) to the varactor banks, which are equivalent to the tuning voltage controls in a conventional voltage-controlled oscillator (VCO). These data buses set the varactors to a desired capacitance thereby establishing the desired DCO frequency. The characteristics of the four varactor banks are summarized in Table I. The PVT and acquisition banks (PB and AB) are used for coarse tuning and have a large frequency step to calibrate process, voltage and temperature shifts as well as for and , are acticoarse channel acquisition. Their inputs, vated sequentially during frequency locking and are frozen afterwards. The tracking banks (TIB and TFB) are used to perform PLL tracking and data modulation. Their inputs, notated as and , are constantly toggled during normal operation. Highdithering operates on TFB to achieve fine frequency speed resolution. As will be discussed later, such varactor design of) characfers a highly linear frequency-code (DCO gain, teristic, where code is the digital input tuning code. The digital dithering of the tracking logic, including the high-speed bank varactors (Trk-F), and binary-to-unit weighted encoding of the integer tracking (Trk-I) and acquisition (Acq) bank varactors, is tightly coupled to the DCO ASIC cell and constitute a larger DCO system as shown in Fig. 1(b) that provides a digital equivalence of a highly linear VCO with a wide dynamic range. The conditioned OTW ( , and ) of the DCO system now consists of three components, of which only one is normally ac- Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. 1162 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 41, NO. 5, MAY 2006 TABLE I SUMMARY OF DCO VARACTOR BANKS tive at a time. The DCO interface logic also performs conversion from the signed to unsigned (binary-weighted or unit-weighted) number representation. For stringent far-out phase noise requirement of GSM900 band, the signal voltage level at DCO core is very high. This imposes concerns on circuit reliability including GOI, CHC and EM in an advanced digital CMOS process which has a low for DCO voltage rating. With the approach of increasing core, the required SNR is relaxed and so is the reliability. Fig. 2. Simplified circuit schematic of the DCO core. III. BUILDING BLOCKS OF THE DCO ASIC CELL As described earlier, the DCO ASIC cell consists of a DCO core, four frequency dividers and several clock buffers. In addition to the required performance, each block was also designed with silicon area and power consumption constraints. As a result, one DCO core and four different frequency dividers were designed in this ASIC cell, which will be presented in detail in the following sections. A. DCO Core A simplified DCO core schematic is shown in Fig. 2. The topology is similar to that in [4] and [5]. and are two halves of a center-tapped inductor. and are metal–insulator–metal (MIM) capacitors forming the differential PB varrepresents the AB and TB varactor banks. actor bank. As stated in Section II, the 90-nm digital CMOS process used for this work does not offer an inductor with a suitable . A 1- m Al layer originally used to cover the bondpad is patterned and connected in parallel with the inductor metal traces. So, the inductor design is the first point of focus for the DCO core. Inductor simulations were carried out using an in-house tool which was calibrated with an array of test structures. Because of the high resistivity of the metal trace, a tradeoff is needed between and parasitic capacitance of the inductor. The inductor is formed with M2–M5 (copper) and an Al layer. The inductor has width, spacing, and inner diameter of 12, 2, and 60 m, respectively, and has four turns. Using an definition, the simulated single-ended is 4 and 6 at 0.9 and 3.6 GHz, respectively (Fig. 3). The differential phase-stability [7] is 4 and 10.2 at 0.9 and 3.6 GHz, respectively. The peak frequency with definition is 2.3 GHz, which is lower than the required lowest frequency of 3.296 GHz definition, the peak is for GSM. With a phase-stability 3.6 GHz, so the inductor performance has been severely impacted by its shunt parasitic capacitance for the entire frequency tuning range. The low peak and low self-resonant frequencies are also tradeoff with metal electromigration which will be discussed in Section VI-C. With the metal stack, the technique of using a patterned-ground shield underneath the inductor [8] is not suitable. Fig. 3. Simulated single-ended and differential phase-stability ential is slightly 10 at the peak- frequency of 3.6 GHz. Q > Q Q. The differ- There are three types of varactors available in this 90-nm CMOS process: a MIM varactor (Fig. 2, [9]), a MOS varactor, and a junction-diode varactor. In order to have a wide frequency , a fully tuning range while having a minimal VCO gain, discrete tuning technique has been adopted [3], hence the oscillator with digital control. Consequently, the junction-diode varactor is not an option because there is no flat region in its characteristic. Although the MOS varactor offers the best of 80 @ 3.6 GHz with a good ratio of 3.2, while having the best process control in a CMOS process, 1.3 V across the terminals is needed to bias the capacitor at curve under the large the near-flat region of its effective DCO signal swing as illustrated in Fig. 4, which is for the AB varactor using nMOS transistors. When the MOS varactor is connected in the DCO as C1/C2 and the poly gate terminal is connected to OSCP/OSCM with a 1.4-V DC (Fig. 2), the control voltage needs to be switched between 0.1 and 2.7 V. The two control voltages not only make the DCO incompatible with a low-voltage CMOS process, but also require two extra low-dropout regulators (LDOs) which further cost two extra external capacitors. In addition, considering the battery voltage drop when an external high-power PA (HPA) is enabled during data transmission, the headroom for the 2.7-V LDO is very Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. HUNG et al.: DCO SYSTEM FOR SAW-LESS TRANSMITTERS IN CELLULAR HANDSETS 1163 Fig. 5. Measured frequency-code curve of the AB varactor. The straight line is fairly constant. implies that K Fig. 4. Measured CV curve (solid line) and derived effective CV curves under large oscillator signal swings. With the intentional body effect, the measured CV curve is not flat and does not have poly depletion in inversion region. small. If the LDO loses regulation, the DCO will be vulnerable to any noise and transient effects present at the battery terminal, and the increased DCO frequency pushing could force the ADPLL to be momentarily out of lock. As a result, a MIM varactor was chosen for the PB which has the majority of the tank capacitance. As shown in Fig. 2, each bit of MIM varactor contains two MIM capacitors connected differentially with a series switch , two pull-up and two pull-down transistors to effectively turn the varactor between its high and low-capacitance states. Measured intrinsic of the MIM capacitor is 80 at 3.6 GHz. is turned on, i.e., high-capacitance state, the varWhen is turned off to be in low-caactor drops to 30. When pacitance state, the parasitic capacitance of the MIM capacitor and transistors has an effective of 50. The pull-down transisat 0 V so that tors set the DC levels for drain and source of can be efficiently turned into triode region while the weak pull-up transistors set the DC level to VDDOSC to reduce the thus increasing of the parasitic parasitic capacitance of capacitance. The pull-up pMOS can be implemented by either resistors or transistors. The latter was chosen for silicon area efficiency. Compared to MOS varactors, MIM varactors have a much lower . However, since the differential phase-stability inductor is only 10, the impact of lower varactor is tolerable. When the MIM varactor is at its low-capacitance state, the large DCO internal signal swing and the DC level of 1.4-V supply voltage at source/drain of the pull-up transistors force the -nwell junction diodes of the pull-up pMOS to modrain mentarily go into forward-bias condition resulting in a latch-up concern. However, since the forward-bias condition occurs only in 50% of a 3–4 GHz period, the latch-up phenomenon with the parasitic BJTs can not be triggered. In order to achieve the frequency resolution summarized in Table I, AB, TIB and TFB varactor banks need to have a small C/LSB of 500, 50, and 50 aF, respectively. This is not possible to implement using a MIM capacitor especially considering the roughness of process control on metal interconnect relative to critical dimensions (CD) of CMOS transistors. The variability of frequency step among varactor bits (DNL) results in an inaccurate phase-locked frequency and errors in modulation, as well as potentially increases phase noise due to random quantization noise. Hence, gate oxide capacitance which has the tightest control in a CMOS process is used for AB, TIB, and TFB. Instead of using an accumulation-mode MOS varactor, AB, TIB, and TFB varactor banks are implemented using nMOS transistors with a thicker gate oxide available to the base-line process (intended for digital IO buffers) without any additional cost. The electrical connection is also illustrated in Fig. 2. Gate terminals are connected to oscillator nodes (OSCP/OSCM). Source/drain nodes are connected together and are controlled by ADPLL between VDDOSC and ground. Bulk is the substrate remaining at the ground potential. This arrangement due to the body effect. The higher results in a slightly higher is desirable since it moves the transition between and toward VDDOSC/2. The measured curve is shown in Fig. 4 with solid line. With the intentional body effect, the curve is not flat and does not have poly depletion measured in inversion region within the bias voltage range of interest. After applying large oscillator waveforms, the effective curves can be derived and are also shown in Fig. 4. The circles at 0 and 1.4 V represent the operating points used in the DCO. It can be observed that this varactor can easily tolerate 100-mV shift which is larger than a typical process control limit. curve for Operating in the nonflat region of the effective AB and TB varactor banks does not cause any phase noise nor frequency pushing concerns since they are only a fraction of the total capacitance of the LC tank. In a conventional VCO where the frequency versus tuning voltage is largely dependent of the varactor characteristic, is typically highly nonlinear and requires compensation to achieve a constant loop gain in a PLL [10]. In contrast, is fairly constant (Fig. 5) over several MHz since the curves. varactors only operate between two states of their does vary over large carrier frequency change but is automatically calibrated and compensated on the fly in the ADPLL [11]. and , beNMOS is used for the cross-coupled pair, noise than that of PMOS. cause in this process it has a lower Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. 1164 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 41, NO. 5, MAY 2006 When is operated in the saturation region, it can contribute region. as much as 15% to the total phase noise in the Hence, it is biased in the linear region to reduce its noise contribution with a penalty of increased frequency pushing. Although may be eliminated and the DCO current can functionally, be controlled by a programmable LDO, it was kept to somewhat increase PSRR so as to reduce the phase noise sensitivity is configured with seven binary-weighted to supply noise. and providing high bits. The second resonator operating at is already low, Z is especially important here since the of improving effective/loaded tank is very critical. B. Transmitter Dividers A 4 frequency divider can improve phase noise of its input signal from the DCO by 12 dB which is only true for close-in but not far-out phase noise. At large frequency offsets, the divider noise limits the output phase noise. As described earlier, it is difficult to design an oscillator core with a very low phase noise floor especially when the resonator is poor. Therefore, the noise should be budgeted such that after frequency division, DCO core noise still dominates. For example, assuming the DCO core phase noise at 20-MHz offset from 3.6-GHz carrier is 153 dBc/Hz, theoretically, the phase noise should be 165 dBc/Hz after 4. If the intrinsic divider phase noise is 170 dBc/Hz at 20-MHz offset from 900-MHz output carrier, when connected with 3.6-GHz DCO, the phase noise would become 163.8 dBc/Hz at 20-MHz offset from 900-MHz output frequency. Because there is still a PPA cascaded with an external high-power amplifier after divider, there is essentially no margin with 163.8 dBc/Hz for EGSM band phase noise requirement. Hence, the divider noise should be further reduced to 173 164.4 dBc/Hz. The DCO dBc/Hz so the total phase noise is far-out phase noise could also be further reduced by increasing current consumption, but it is limited with transistor reliability. For simplicity, if assuming the divider internal waveforms are perfectly square, with the low 1.4-V supply, the divider output , must be nV Hz dBc/Hz which is noise, very low. Although an SCL divider [12] is commonly used for low power, for quadrature outputs and for handling high input fre155 dBc/Hz is quency, its broadband phase noise floor of not low enough mainly due to its small internal signal amplitude, long transistor turn-on time, and high conversion gain for both AM and PM noise present in the divider. On the other hand, a dynamic divider with square-wave internal signals can achieve much lower noise floor. The only concern is the capability of operating at a high input frequency. In order to handle the DCO , two dynamic D flip-flops are cascaded with frequency at output feeding back to input to form the 4 diinverted vider as shown in Fig. 6. Unlike the flipflops in a standard digital logic library, the sinusoidal input waveform does not represent a simple ON and OFF, and the “latch” does not provide any mechanism to self-sustain the logic level but relies on the parasitic capacitance to “memorize” the states. The principle is very similar to other high-speed prescalers [13] in order to achieve high operating frequencies. The voltage headroom problem is alleviated by having only two stacked transistors (an inverter). Since Fig. 6. Simplified circuit schematic of the low phase noise floor. 44 dynamic frequency divider for the waveform is square, and has a short rise and fall time, it contributes less noise and has a low sensitivity to AM and PM noise. Similar to an SCL divider, if the switches of the passgate are constantly closed, the dynamic divider will self-oscillate thus becoming a ring oscillator. Although the dynamic divider can be configured to generate quadrature outputs, it was designed to generate only a single phase output for transmitters due to its higher current consumption than that of the SCL divider. The advanced CMOS process does have a strong advantage for the dynamic divider to operate at a high frequency. C. Receiver Dividers As shown in Fig. 1, there are two receiver dividers. The first frequency divider takes the DCO core waveform and performs 2. The outputs have quadrature phases and are buffered as LO signals for HB receiver mixers. One of the 4 phases is also buffered for ADPLL. Because this frequency divider needs to handle the whole frequency tuning range from DCO especially before ADPLL acquires locked condition, the maximum input frequency could be as high as 4.5 GHz. The dynamic divider used for transmitter does not have enough margin for 4.5-GHz input frequency over PVT corners. Therefore, SCL latches shown in Fig. 7 are used for the first 2. Although the phase noise floor from an SCL divider is inferior to a dynamic divider, it is satisfactory for the LO requirements of a GSM receiver. The SCL frequency divider self-oscillates if the clock tranand are continuously turned on [12] which is sistors possible when the input waveform is too small and the DC level are high enough. Therefore, the diat gate nodes of vider can be interpreted as an injection-locked oscillator. The self-oscillation frequency is determined by delay time of the latch which is dependent of transistor sizes and DC bias level. As a result, it is expected to have an input amplitude versus input frequency characteristic illustrated in Fig. 8 [14]. The sensitivity is maximized at an input frequency twice the self-oscillation frequency. For a given input amplitude other than the maximum sensitivity point, there are two potential circuit solutions. The one with larger delay time could be used to save current consumption. The second 2 frequency divider for producing quadrature RX LB LO is designed with a dynamic divider. Because the maximum input frequency has been reduced and the input waveform is square, it is advantageous to use a dynamic divider for low power and low noise. The transistor sizes are much smaller than TX dividers. Two cross-coupled connections are used for Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. HUNG et al.: DCO SYSTEM FOR SAW-LESS TRANSMITTERS IN CELLULAR HANDSETS 1165 4 Fig. 9. Simplified schematic for the RX LB frequency divider. The 2 dynamic divider is capable of producing quadrature outputs at low power and low noise. Fig. 7. Schematic of the RX HB divider. Two SCL latches connected in a ring with a negative feedback form a divide-by-2. Fig. 10. Simplified schematic of the PPA. The power control is also done digitally similar to the frequency control for DCO. Fig. 8. Characteristic of input amplitude versus operating frequency of an SCL frequency divider. For a given input amplitude other than the maximum sensitivity point, there are two potential circuit solutions. The one with larger delay could be used to save current consumption. quadrature generation. The simplified schematic is illustrated in Fig. 9. D. Output Buffer (PPA) The PPA [15], shown in Fig. 10, operates as a pseudo-class-E amplifier. The input is driven by a square wave from the TX divider, which is the phase modulated signal from the ADPLL. , are In Fig. 10, nMOS transistors M1x, where used as on/off switches. A radio-frequency choke (RFC) acts as a bi-directional current source, connecting the switch to the on-chip supply voltage regulator. C1 represents the on-chip capacitor connected in parallel to the switch and includes, for analysis purposes, the equivalent capacitance over one cycle given of M1x. The residual second harmonic of by the nonlinear the transmit frequency is filtered by C2 and L1, allowing the PPA itself to remain a single-ended circuit, reducing needed matching network components and pin count. The remaining matching network components are chosen to approach the condition where the switch output is critically damped such that the drain voltage is low when the output current is high and vice versa. Furthermore the extra input circuitry and output filtering circuitry of class F type amplifiers are not required since the inverter delay is small enough for maximum GSM channel near 2 GHz. Power control is accomplished in the PPA by recognizing the impairments that a pseudo-class-E PPA suffers when implemented in a CMOS process. First, the MOS switch has a significant on-resistance and can only draw a limited current from the RFC when the input waveform is high. Second, the rise and fall times of the input digital waveform are not negligible although they are typically less than 100 ps in this CMOS process. By reducing the effective switch size and increasing the effective ON impedance, the output power of the PPA is reduced. The effective switch size is controlled by using an array of parallel nMOS devices (M1x in Fig. 10). That is, by using some portion of the array, arbitrary output power levels below the maximum output power can be achieved. The control logic for each M1x switch comprises an AND gate whose inputs are the phase-modulated Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. 1166 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 41, NO. 5, MAY 2006 output of the ADPLL and part of the amplitude control word from a digital control block. The AND gate is implemented as a pass-gate rather than an actual fully static AND gate, so that thermal noise from the AND function is minimized, reducing the ultimate broadband phase noise floor of the PPA. IV. PHASE NOISE DUE TO DITHERING As shown in Table I, the tracking bank varactor provides a frequency resolution of 20 kHz at GSM HB carrier frequencies, which is relatively large. By nature of the PLL, the TIB varactor will be dithered at the update rate of the digital input which is 26-MHz reference frequency, , in this design to achieve the desired frequency. Assuming the digital input is a series of impulses and TIB capacitance changes instantly following the impulses, the PLL is effectively making a white dithering on TIB rate. However, in reality, both the digital input varactor at and the varactor capacitance switching are not impulses, but square waves corresponding to a zero-order hold operation, the white noise assumption is not strictly correct and the quantization noise needs to be multiplied by a sinc function. The quantization noise can be expressed as (2) and can be calculated to be 111 dBc/Hz at 400-kHz offset from a GSM LB carrier and has a 20-dB/dec slope below 10-MHz frequency offset. Such phase noise is too high to meet GSM modulation mask specification. To reduce the quantization noise, the oversampling rate can be increased from to , thereby reducing the quantization noise by 10 dB. The resulting phase noise marginally satisfies requirements for all GSM bands. To increase the margin, a second-order dithering at on TFB is implemented. The MASH dithering moves the quantization noise energy to and greatly reduces the close-in DCO phase noise. For instance, using (2), with an additional 8-bit resolution, the 400-kHz offset phase noise at GSM HB would be theoretically reduced 160 dBc/Hz. to and of the digital Another nonideality is the finite inputs to the TFB bits. To investigate this second-order effect, a simulation approach was taken. A Verilog-A model was built block to co-simulate with the transistor-level for the MASH DCO. Because the simulations need to have both the accuracy for 3.6-GHz DCO signals and a large transient data length for observing the close-in phase noise, a simplified DCO circuit larger TFB varactor and were used. The with results are shown in Fig. 11. It can be clearly seen that when and are increased from 100 to 200 ps, the close-in phase noise has a trend of increasing 10 dB. Below 100 ps, no significant difference is observed from the 100-ps curve. This is in line with the 90-nm CMOS process capability that typical and are 40 ps. 10%–90% Fig. 11. Simulated phase noise contribution with respect to T the TFB digital inputs. and T of V. PRINCIPLE OF SYNCHRONOUSLY OPTIMAL DCO TUNING WORD RETIMING Fig. 12 illustrates the principle of synchronously optimal DCO input tuning word retiming method [16]. This idea is based on the observation that when changing the tuning control input of an oscillator in order to adjust its phase/frequency in a normal PLL operation, it is quite a disturbing event to the oscillation, which reveals itself as phase noise at the oscillator output [17]. This is especially noticeable in case of a sample-mode oscillator such as the DCO, where its oscillating frequency is commanded to change at discrete times. Since the oscillating frequency of an LC tank is controlled by a voltage-to-capacitance conversion device, i.e., varactor, the worst moments to change the capacitance is at the instances when the oscillating energy is fully stored in a capacitor because is maximized as shown in Fig. 13(a). These perturbations are AM-to-PM translated by the oscillator circuit into phase noise. On the other hand, changing the varactor capacitance at times when it is fully discharged would hardly affect the as illustrated in Fig. 13(b). oscillator phase noise since The intuitive solution is to control the timing moments so the perturbations are minimized. This is implemented by feeding the delayed oscillator edge transitions back as the clock input to the synchronous register retiming stage, as shown in Fig. 12. The retiming stage ensures that the input control data seen by the oscillator is at a precise and optimal time near the oscillator zero-crossings. The actual delay control is accomplished both by digital logic and by a voltage-controlled delay line such as an inverter string with a tunable supply voltage. As long as the total delay exceeds the DCO clock period, the full 360 degree coverage is guaranteed. Fig. 14 plots the measured GMSK modulated spectrum at 400-kHz offset versus the total delay around the DCO. The round trip starts from the LC-tank differential output zero-crossing to the nearest transition time of the DCO tuning word input. Depending on the timing skew between the varactor state transition and the LC-tank state, the phase noise of the modulating spectrum can vary as much as 4 dB. The flyback delay is set algorithmically to minimize the phase noise. The algorithm to determine the optimal delay takes advantage of the fact that the phase error which is related to the DCO phase noise Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. HUNG et al.: DCO SYSTEM FOR SAW-LESS TRANSMITTERS IN CELLULAR HANDSETS 1167 Fig. 12. Synchronously optimal sampling and timing adjustment of the DCO input. Fig. 14. Measured 400-kHz phase noise of the modulated spectrum versus the total round-trip delay. The phase noise is measured in the resolution bandwidth of 30 kHz and compared against the phase noise integrated in the 30-kHz region around the center frequency. The operating TX frequency of 824.2 MHz corresponds to 303 ps of the resonating LC-tank period. and gate voltage waveforms shown in Fig. 15, the effective overshoot, denoted as , can be calculated using the following equation [18]: (3) Fig. 13. Waveforms for capacitance change of an LC-tank oscillator. is already in digital form for processing. Mean-squared-error statistics of the digital phase-error samples are optimized by utilizing the readily available digital signal processing hardware. VI. RELIABILITY For a stringent phase noise requirement, both signal power level and signal-to-noise ratio (SNR) need to be very high so that the absolute noise power from the far-out spectral skirt is still above the broadband phase noise floor. This imposes concerns on GOI, CHC and metal EM in an advanced digital CMOS process since the gate oxide is thin with a low voltage rating, the channel length is short and the metal thickness is thin. Although from to , the required SNR is reby increasing laxed, thus the reduced internal voltage and current swings of the DCO core, there are still concerns on marginality. A. Transistor Reliability—GOI Referring to Fig. 2, assuming the oscillator nodes, OSCP and OSCM, have 0.9-V voltage amplitude, in order to be as better than 153 dBc/Hz at 20-MHz offset from described in Section III-B, the noise level of DCO core must nV for transistors operating under a sinusoidal be waveform. With a 1.4-V supply voltage, the maximum absolute voltage on drain and gate nodes would be at least 2.3 V on 1.3-V rated transistors. Applying a statistical model on the drain is where is a constant, is the oscillation period, and waveform. The calculated is 1.9 V for the transient 167 dBc/Hz at TX divider output, which means equivalently, stays at 1.9 V for 25% of , 1.4 V for another 25% of and 0 V for the rest of . This result is within the process limit. would drop to 1.7 V, resulting in a For 162 dBc/Hz, reasonable margin in reality. B. Transistor Reliability—CHC The transistor degradation due to CHC include decreased channel current, increased threshold voltage and decreased transconductance over time [19]. The transistors of concern and , in Fig. 2. are again the cross-coupled transistors, , CHC life time is dependent of several factors such as and channel length. In general, the worst-case operating . In the DCO waveform shown in condition is when occurs at the points where Fig. 15, the condition of the waveforms have the largest absolute value of slope. That is very short. For the extreme is, the duration of and , there is no conditions such as and are not the CHC concern. The channel length for minimum allowed dimension of this process further reducing the CHC concern. C. Metal Electromigration (EM) In advanced digital CMOS processes, although the interconnect metal is typically made of copper (Cu), the metal thick- Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. 1168 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 41, NO. 5, MAY 2006 Fig. 15. Voltage waveforms for the cross-coupled transistors in Fig. 2. The calis 1.9 V to have 167 dBc/Hz at 20-MHz offset for EGSM freculated V quencies. 0 ness is very small in order to reduce the parasitic capacitance between adjacent metal lines for higher logic operating speed. Compared to Al, Cu can tolerate much higher current density for the same thickness and width. However, after the Cu thickness being scaled down for digital logic speed, the EM capability of Cu per layer is only slightly better than Al. The EM degradation would cause metal sheet resistance to increase, thus degrading circuit performance. Typical EM concerns can be resolved by increasing metal width and/or metal stack. However, on-chip spiral inductor is one exception that the metal cannot be arbitrarily changed. As shown in Fig. 3, the DCO operates around the inductor peakfrequency, there is only a small flexibility to increase the inductor metal width or number of metal layers. The main concerns here are: 1) the current distribution between Cu and Al metal layers such that there may be too much current flowing in Al especially when the Al layer is able to increase overall inductor significantly and 2) the Cu-Al interface may have degraded EM than the metal layers alone. Upon a detailed calculation, it was determined that combining M3–M5 Cu layers and the Al layer for the inductor would offer minimum-required for DCO while peak- frequency is higher than the maximum GSM channel in PCS band. However, there is essentially no margin for EM and phase noise requirement. Therefore, M2 was added and the metal width is limited to 12 m. The addition of M2 moved the differential phase-stability-peak- frequency to 3.6 GHz which means there is excessive parasitic capacitance from the inductor and has an adverse effect on the overall frequency tuning range. As a result, iterations for distributions between and values were exercised to achieve the needed and to cover GSM quad bands with one single DCO core. VII. EXPERIMENTAL RESULTS The measurement was done with the DCO system, an internal regulator supplying 1.4 V to DCO system and the PPA. The Aeroflex PN9000B delay-line phase noise measurement 170 dBc/Hz. After de-emmodule has a phase noise floor of bedding the noise floor from the measured raw data, the DCO phase noise plot is shown in Fig. 16. At 400-kHz, 3-MHz and 20-MHz frequency offsets, the phase noise is 123.5, 149, Fig. 16. Measured phase noise of DCO system + LDO + PPA. The phase noise at 400-kHz, 3-MHz and 20-MHz frequency offsets are 123.5, 149, and 167 dBc/Hz, respectively, from a 915-MHz carrier. 0 0 0 TABLE II SUMMARY OF THE PERFORMANCE and 167 dBc/Hz, respectively, from a 915-MHz carrier, which is the highest frequency requiring 20-MHz offset phase noise 162 dBc/Hz. There is no visible difference between to be turning on and off the dithering, indicating that the noise is below the phase noise of the DCO system [1]. The 171 dBm at 8-dBm output PPA alone has a noise floor of power. Hence, the PPA degrades the phase noise at TX LB divider output by 0.27 dB. The measured TX LB phase noise at 20-MHz offset has a 5-dB margin which is more than enough to cover process and temperature corners. There is a small hump in the data between 10- and 20-MHz offset which is due to the PCB. Unlike [4] whose phase noise corner between 20 and 30 dB/dec is 500 kHz, the corner for this design is at 1 MHz. When programming to have a smaller capacitance, the close-in phase noise such as that at 400-kHz offset has too much capacitance improves. It is believed that causing the voltage waveforms at OSCP/M to be unsymmetrical resulting in a higher 20–30 dB/dec corner [17]. The DCO system has a frequency tuning range of 893 MHz at DCO core frequency. Since GSM quad band needs 684 MHz, there is a 210 MHz margin for PVT corners. Temperature does not have a significant impact on frequency tuning range. The measured DNL of TIB is 4 kHz corresponding to 20% of TIB Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. HUNG et al.: DCO SYSTEM FOR SAW-LESS TRANSMITTERS IN CELLULAR HANDSETS 1169 1.2-V supply. Finally, the approach is naturally suitable for SoC and enables the software-defined radio. REFERENCES Fig. 17. Die photo of the DCO system. It only occupies 550 cluding >200-pF supply bypass capacitor. 2 800 m in- frequency step. A dynamic element matching is implemented in the ADPLL to mitigate the DNL. The DCO system is supplied by a single LDO. The DCO core draws 18 mA when the PPA output has 167 dBc/Hz phase noise at a 20-MHz offset from the highest EGSM channel. The current can be reduced for 20-MHz offset phase noise in normal operation. The dependence of close-in phase noise to DCO core current consumption is 1 dB when the current is programmed between 3 and 18 mA. Table II summarizes the measurement results with performance targets. A die photo is shown in Fig. 17. The DCO system occupies only 550 800 m . VIII. CONCLUSION An RF digitally controlled oscillator system including a DCO core with a built-in RF DAC and frequency dividers for SAWless cellular transmitter has been implemented and described in detail. Using a standard digital 90-nm CMOS process, the DCO system has been demonstrated with excellent performance that exceeds the requirements of the most popular cellular standard, GSM. The fully digital frequency tuning enables to employ all-digital frequency synthesizers, which would typically include a digital phase detector and a digital loop filter, in the most advanced low-voltage digital deep-submicron CMOS processes. The varactor (RF DAC) design results in a highly linear DCO gain and is insensitive to process variations such as shift. The dithering helps to achieve a fine frequency resolution and contributes negligible phase noise in the DCO output. The total narrowband frequency dynamic range is equivalent to 23 bits since it extends 400 MHz with the open-loop frequency resolution of 40 Hz in the 1.6–2.0 GHz bands. The measured phase noise at 20-MHz offset is 167 dBc/Hz including the noise from LDO and PPA. Although the internal oscillator swing is large, detailed analyses with design tradeoff result in no concerns on gate oxide integrity, channel hot carrier and metal electromigration. This work not only demonstrates feasibility of a DCO system in fully digital RF frequency synthesizers for mobile phones but also promotes the most cost-effective integration of the RF oscillator with the digital back-end onto a single silicon die. Because of the digital nature, the DCO system can be scaled down for future CMOS process such as 65-nm node with [1] R. B. Staszewski, C.-M. Hung, N. Barton, M.-C. Lee, and D. Leipold, “A first RF digitally-controlled oscillator for mobile phones,” in Proc. IEEE Radio Frequency Integrated Circuits (RFIC) Symp., Jun. 2005, pp. 119–122. [2] C.-M. Hung, N. Barton, R. B. Staszewski, M.-C. Lee, and D. Leipold, “A first RF digitally-controlled oscillator for SAW-less TX in cellular systems,” in Symp. VLSI Circuits Dig. Tech. Papers, Jun. 2005, pp. 402–405. [3] R. Staszewski, J. Wallberg, S. Rezeq, C.-M. Hung, O. Eliezer, S. Vemulapalli, N. Barton, M.-C. Lee, P. Cruise, C. Fernando, M. Entezari, R. Staszewski, K. Maggio, K. Muhammad, and D. Leipold, “All-digital PLL and GSM/EDGE transmitter in 90 nm CMOS,” in IEEE Int. Solid-State Circuits Conf. (ISSCC) Dig. Tech. Papers, Feb. 2005, p. 316. [4] C.-M. Hung, N. Barton, M.-C. Lee, and D. Leipold, “An ultra low phase noise GSM local oscillator in a 0.09- m standard digital CMOS process with no high-Q inductors,” in Proc. IEEE Radio Frequency Integrated Circuits (RFIC) Symp., Jun. 2004, pp. 483–486. [5] E. Hegazi, H. Sjöland, and A. Abidi, “A filtering technique to lower LC oscillator phase noise,” IEEE J. Solid-State Circuits, vol. 36, no. 12, pp. 1921–1930, Dec. 2001. [6] D. Leeson, “A simple model of feedback oscillator noise spectrum,” IEEE Proc., vol. 54, no. 2, pp. 329–330, Feb. 1966. [7] K. K. O, “Estimation methods for quality factors of inductors fabricated in silicon integrated circuit process technologies,” IEEE J. Solid-State Circuits, vol. 33, no. 8, pp. 1249–1252, Aug. 1998. [8] C. Yu and S. Wong, “On-chip spiral inductors with patterned ground shields for Si-based RF ICs,” IEEE J. Solid-State Circuits, vol. 33, no. 5, pp. 743–752, May 1998. [9] S.-T. Lee, S.-J. Fang, D. Allstot, A. Bellaouar, A. Fridi, and P. Fontaine, “A quad-band GSM-GPRS transmitter with digital auto-calibration,” IEEE J. Solid-State Circuits, vol. 39, no. 12, pp. 2200–2214, Dec. 2004. [10] J. Craninckx and M. Steyaert, “A fully integrated CMOS DCS-1800 frequency synthesizer,” IEEE J. Solid-State Circuits, vol. 33, no. 12, pp. 2054–2065, Dec. 1998. [11] R. B. Staszewski, D. Leipold, and P. T. Balsara, “Just-in-time gain estimation of an RF digitally-controlled oscillator for digital direct frequency modulation,” IEEE Trans. Circuits Syst. II, Analog Digit. Signal Process., vol. 50, no. 11, pp. 887–892, Nov. 2003. [12] C.-M. Hung, B. Floyd, N.-K. Park, and K. K. O, “Fully integrated 5.35-GHz CMOS VCOs and prescalers,” IEEE Trans. Microw. Theory Tech., vol. 49, no. 1, pp. 17–22, Jan. 2001. [13] H. Yan, M. Biyani, and K. K. O, “A high-speed CMOS dual-phase dynamic-pseudo nMOS ((DP) ) latch and its application in a dualmodulus prescaler,” IEEE J. Solid-State Circuits, vol. 34, no. 10, pp. 1400–1404, Oct. 1999. [14] B. A. Floyd, C.-M. Hung, and K. K. O, “Intra-chip wireless interconnect for clock distribution implemented with integrated antennas, receivers, and transmitters,” IEEE J. Solid-State Circuits, vol. 37, no. 5, pp. 543–552, May 2002. [15] P. Cruise, C.-M. Hung, R. B. Staszewski, O. Eliezer, S. Rezeq, K. Maggio, and D. Leipold, “A digital-to-RF-amplitude converter for GSM/GPRS/EDGE in 90-nm digital CMOS,” in Proc. IEEE Radio Frequency Integrated Circuits (RFIC) Symp., Jun. 2005, pp. 21–24. [16] B. Staszewski, D. Leipold, K. Muhammad, and P. T. Balsara, “Digitally controlled oscillator (DCO)-based architecture for RF frequency synthesis in a deep-submicrometer CMOS process,” IEEE Trans. Circuits Syst. II, Analog Digit. Signal Process., vol. 50, no. 11, pp. 815–828, Nov. 2003. [17] A. Hajimiri and T. H. Lee, “A general theory of phase noise in electrical oscillators,” IEEE J. Solid-State Circuits, vol. 33, no. 2, pp. 179–194, Feb. 1998. [18] B. Hunter, “Gate oxide reliability: The statistical dependence of oxide failure rates on Vdd and tox variations,” Texas Instruments, Inc., Dallas, TX, Internal Technical Paper, Sep. 1998. [19] S. Aur, “90-nm CMOS Process CHC Design Guidelines,” Texas Instruments, Inc., Dallas, TX. Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply. 1170 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 41, NO. 5, MAY 2006 Chih-Ming Hung (S’98–M’00) received the B.S. degree in electrical engineering from the National Central University, Chung-Li, Taiwan, R.O.C., in 1993, and the M.S. and Ph.D. degrees in electrical and computer engineering from the University of Florida, Gainesville, in 1997 and 2000, respectively. In July 2000, he joined Texas Instruments, Inc., Dallas, TX, where he is currently a Senior Member, Group Technical Staff. He has focused on R&D of advanced CMOS RF IC for wireless cellular applications. Since 2002, he has been a Design Manager responsible of RF front-ends and integration of RF, analog and digital SoC for the digital RF processor (DRP). He has authored or coauthored 43 journal and conference publications. He has 2 granted patents and 10 patents pending. He also serves as a reviewer for various technical journals and conferences. His interests include CMOS RF IC design, integrated passive components, and SoC integration. Dr. Hung received several research grants and a fellowship between 1996 and 2000 working on high-performance fully integrated CMOS PLLs and VCOs between 900-MHz and 30-GHz frequency range including developing on-chip passive components in CMOS processes suitable for those frequencies. In November 1999 and February 2000, he and his colleagues received the Semiconductor Research Corporation Copper Design Contest winner awards, respectively with a 15-GHz fully integrated CMOS on-chip wireless clock distribution system. He has received 2004 Engineer of the Year Awards from both IEEE Dallas and Texas Society of Professional Engineers. Robert Bogdan Staszewski (M’94–SM’05) received the B.S.E.E. (summa cum laude), M.S.E.E., and Ph.D. degrees from the University of Texas at Dallas in 1991, 1992, and 2002, respectively. From 1991 to 1995, he was with Alcatel Network Systems, Richardson, TX, working on Sonnet cross-connect systems for fiber optics communications. He joined Texas Instruments, Inc., Dallas, TX, in 1995, where he is currently a Distinguished Member of Technical Staff. From 1995 to 1999, he was engaged in advanced CMOS read channel development for hard disk drives. In 1999, he co-started a Digital Radio Frequency Processor (DRP) group within Texas Instruments with a mission to invent new digitally intensive approaches to traditional RF functions for integrated radios in deep-submicron CMOS processes. He currently leads the DRP system and design development for transmitters and frequency synthesizers. He has authored or coauthored 40 journal and conference publications and holds 25 issued U.S. patents. His research interests include deep-submicron CMOS architectures and circuits for frequency synthesizers, transmitters, and receivers. Nathen Barton received the B.S.E.E. degree from Washington State University, Pullman, and the M.S.E.E. degree from Oregon State University, Corvallis, in 1998 and 2002, respectively. He first joined Texas Instruments, Inc., Dallas, TX, as an intern in 1997. His research interests include ultra-low phase noise LC oscillators, frequency dividers, ultrahigh-frequency oscillators, and designautomation software. Meng-Chang Lee (S’00–M’02) received the B.S. degree from National Taiwan University, Taipei, Taiwan, R.O.C., in 1999, and the M.S. degree from the Georgia Institute of Technology, Atlanta, in 2002, all in electrical engineering. In 2001, he interned with Texas Instruments, Dallas, TX, and worked on a high-speed serial link interface for base station application. Since 2002, he has been with the RF-CMOS group at Texas Instruments as an RFIC Designer working on single-chip solutions for GSM/GPRS/EDGE. Dirk Leipold received the Diploma in physics from the University of Konstanz, Konstanz, Germany, in 1991. From 1991 to 1995, he worked in the Paul Scherrer Institute Zurich on Smart pixel optoelectronics. He received the Ph.D. degree in physics from the University of Konstanz in 1995. He joined Texas Instruments in Germany in 1995 where he worked in RF process integration, device characterization, and modeling, in particular the development of RF-CMOS technologies on high resistivity substrates. From 1998 to 1999, he represented Texas Instruments in the ETSI Hiperlan2 committee, where he was editor for the PHY layer technical specification. In 1999, he moved to Texas Instruments, Inc., Dallas, TX, where he is currently a Design Manager of the Digital RF Processor (DRP) group. His research interests include advanced RF architectures, nanometer-scale CMOS, and quantum electronics. Authorized licensed use limited to: Carleton University. Downloaded on March 16, 2009 at 16:43 from IEEE Xplore. Restrictions apply.