Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
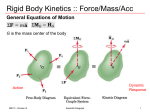
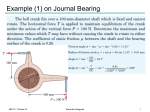
Plane Kinetics of Rigid Bodies :: Relates external forces acting on a body with the translational and rotational motions of the body :: Discussion restricted to motion in a single plane (for this course) Body treated as a thin slab whose motion is confined to the plane of slab Plane containing mass center is generally considered as plane of motion All forces that act on the body get projected on to the plane of motion All parts of the body move in parallel planes A body with significant dimensions normal to the plane of motion may be treated as having plane motion if the body is symmetrical about the plane of motion through the mass center Idealizations suitable for a very large category of rigid body motions ME101 - Division III Kaustubh Dasgupta 1 Plane Kinetics of Rigid Bodies :: Earlier discussion on rectilinear/curvilinear motion - 2 equations of motion Fx ma x Fy ma y :: Plane kinetics of rigid bodies - Additional equation of motion - Account for the rigid body rotation ME101 - Division III Kaustubh Dasgupta 2 Plane Kinetics of Rigid Bodies General Equations of Motion G is the mass center of the body Dynamic Response Action ME101 - Division III Kaustubh Dasgupta 3 Plane Kinetics of Rigid Bodies • Force/mass/acceleration – Free Body Diagram • Work-energy principles – Active force diagram • Showing only the (active) forces which contribute to the work done • Impulse-momentum method – Impulse-momentum diagram ME101 - Division III Kaustubh Dasgupta 4 Rigid Body Kinetics :: Force/Mass/Acc Plane Motion Equations ω = ωk ; α = αk ; α = ω̇ Angular momentum @ G Vel of mi relative to G is a vector normal to the x-y plane along ω (magnitude = ρi2ω) Magnitude of HG: The summation: Mass Moment of Inertia (Ῑ ) of the body about z-axis through G Measure of the rotational inertia, which is the resistance to change in rotational velocity due to the radial distribution of mass around the z-axis through G Generalized laws of motion: ME101 - Division III 5 Rigid Body Kinetics :: Force/Mass/Acc Alternative Derivation Using mass center G as the reference point: Accln of mi is vector sum of three terms: a̅, and relative accln terms ρi ω2 and ρi α Sum of moments of these force comp @ G: Since origin is taken as mass center: Same equation moment of only the external forces The force comp mi ρi ω2 passes through G ω has no influence on the moment eqn @ G ma̅ = translational dynamic response Ῑ α = rotational dynamic response ME101 - Division III Kaustubh Dasgupta Rigid Body Kinetics :: Force/Mass/Acc Alternative Moment Equations Moment @ any arbitrary point P: ρ̅ is the vector from P to mass center G, and a̅ is the mass center accln. ρ̅ x ma̅ = moment of magnitude of ma̅ @ P ma̅ d Another eqn was developed for system of particles: For rigid body plane motion, if P is fixed to the body: Magnitude of = IP α (IP is mass moment of inertia @ P) For rigid body rotating @ a nonaccelerating point O fixed to the body: (Point P becomes O and aP = 0) ME101 - Division III Kaustubh Dasgupta 7 Rigid Body Kinetics :: Force/Mass/Acc Constrained and Unconstrained Motion :: Motion of a rigid body may be constrained or unconstrained a̅ x, a̅y, and α can be determined independently using plane motion eqns ME101 - Division III Kinematic relationship betn the accln comp of mass center (linear accln) and the angular accln of the bar to be determined first and then apply the plane motion eqns. Kaustubh Dasgupta 8 Rigid Body Kinetics :: Force/Mass/Acc Systems of Interconnected Bodies :: If motion of connected rigid bodies are related kinematically analyze the bodies as an entire system Two rigid bodies hinged at A Forces in the connection A are internal to the system :: No. of remaining unknowns in the system > 3 (3 eqns of plane motion insufficient) Use Virtual Work method (discussed later) Or dismember the system and analyze each part separately ME101 - Division III Kaustubh Dasgupta 9 Rigid Body Kinetics :: Force/Mass/Acc Application to three cases of rigid body motion: Translation No angular motion of body (ω and α will be zero) Mass moment of inertia will not be effective ME101 - Division III Kaustubh Dasgupta 10 Example on Translation Solution: Motion of bar is curvilinear translation since the bar does not rotate. Motion of G is circular choose n-t coordinates Choosing the reference axes coincident with the directions in which the comp of accln of mass center are expressed Better choice ME101 - Division III Kaustubh Dasgupta 11 Example on Translation Draw the FBD and the Kinetic Diagram From FBD of AC (negligible mass eqn of equilibrium) At = M/1.5 = 5/1.5 = 3.33 kN Member BD also has a negligible mass Two force member in equilibrium The force at B will be along the link θ = 30o ME101 - Division III Kaustubh Dasgupta 12 Rigid Body Kinetics :: Force/Mass/Acc Rotation @ a Fixed Axis Mass Moments of Inertia • Required in rotational acceleration of any body • Mass m of a body is a measure of resistance to translational acceleration • Area moment of inertia is a measure of the distribution of area @ the axis • Mass Moment of Inertia I is a measure of resistance to rotational acceleration of the body Mass moment of inertia of the body @ O-O: ρ = constant throughout the body Units of Mass moment of inertia: kg m2 ME101 - Division III Kaustubh Dasgupta 13 Plane Kinetics of Rigid Bodies Mass Moments of Inertia Radius of Gyration (k) •about an axis for which I is defined: Parallel Axis Theorem (Transfer of Axes) •Mass moment of inertia about any axis parallel to the axis passing through mass center G: •Radius of gyration @ an axis through C Ī and k̄ are the values @ an axis through mass center ME101 - Division III Kaustubh Dasgupta 14 Plane Kinetics of Rigid Bodies Mass Moments of Inertia Plane Motion: Mass MI of the plate (with motion in x-y plane) @ z-axis through O: o o 3-D Motion: ME101 - Division III Kaustubh Dasgupta 15 Plane Kinetics of Rigid Bodies Mass Moments of Inertia Thin Plates Relationship between mass moments of inertia and area moments of inertia exists in case of flat plates. t = constant thickness of the plate, ρ = constant mass density of the plate Mass MI Izz of the plate @ z-axis normal to the plate: Mass MI @ z-axis = mass per unit area (ρt) x Polar MI of the plate area @ z-axis If t is much less as compared to the dimensions of the plate in its plane: Mass MI Ixx and Iyy of the plate @ x- and y-axes are closely approximated by: ME101 - Division III Kaustubh Dasgupta 16 Plane Kinetics of Rigid Bodies Mass Moments of Inertia Products of Inertia: used in the expression for angular momentum of rigid bodies under 3-D motion Parallel Axis Theorem extremely useful while determining mass MI @ any axis OM Direction cosines of OM: l, m, n Unit vector along OM: λ = li + mj + nk ME101 - Division III Kaustubh Dasgupta 17 Plane Kinetics of Rigid Bodies Fixed Axis Rotation • All points in body move in a circular path @ rotation axis • All lines of the body have the same ω and α Accln comp of mass center: ān = r̅ ω2 and āt = r̅ α Two scalar comp of force eqns: ΣFn = m r̅ ω2 and ΣFt = m r̅ α Moment of the resultants @ rotn axis O: Using parallel axis theorem: ME101 - Division III Kaustubh Dasgupta 18 Plane Kinetics of Rigid Bodies Fixed Axis Rotation • If the body rotates @ G a̅ = 0 ΣF = 0 Resultant of the applied forces will only be couple Ī α Center of Percussion • The resultant-force comp (māt = m r̅ α) and the resultant couple Ī α can be combined to form an equivalent system with the force m r̅ α acting at a point Q along OG. Point Q can be located by: Using parallel axis theorem: Io = Ī + m r̅ 2 and radius of gyration @ O: ko = √(Io /m) Io = ko2m Location of Point Q: q = ko2/ r̅ • Point Q is known as Center of Percussion • Resultant of all forces applied to the body must pass through Q ΣMQ = 0 ME101 - Division III Kaustubh Dasgupta 19 Plane Kinetics of Rigid Bodies Fixed Axis Rotation Example: A concrete block is lifted by hoisting mechanism in which the cables are securely wrapped around the respective drums. The drums are fastened together and rotate as a single unit @ their mass center at O. Combined mass of drum is 150 kg, and radius of gyration @ O is 450 mm. A constant tension of 1.8 kN is maintained in the cable by the power unit at A. Determine the vertical accln of the block and the resultant force on the bearing at O. Solution: Draw the FBD and Kinetic Diagrams ME101 - Division III Kaustubh Dasgupta 20 Plane Kinetics of Rigid Bodies Force, Mass, and Acceleration Fixed Axis Rotation Example: Solution: Two ways to draw the FBD and KD KD: Resultant of the force system on the drums for centroidal rotation will be the couple Ī α = Io α T can be eliminated by drawing FBD of the entire system. T will come into picture more calculations ME101 - Division III Kaustubh Dasgupta 21 Plane Kinetics of Rigid Bodies Force, Mass, and Acceleration Fixed Axis Rotation Example: Solution: KD: Resultant of the force system will be the couple Ī α plus moment due to ma of the block I = k2m Ī = Io = (0.45)2150 = 30.4 kgm2 1800(0.6) – 300(9.81)(0.3) = 30.4α + 300a(0.3) We know a = r α α = a/0.3 a = 1.031 m/s2 (and α = 3.44 rad/s2) Oy - 150(9.81) - 300(9.81) - 1800sin45 = 150(0) + 300(1.031) Oy = 6000 N Ox – 1800cos45 = 0 Ox = 1273 N ME101 - Division III Kaustubh Dasgupta 22