Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Middle-ear Mechanics:
The Dynamic Behavior of the Incudo-Malleolar Joint and its Role
During the Transmission of Sound
Dissertation
zur
Erlangung der naturwissenschaftlichen Doktorwürde
(Dr. sc. nat.)
vorgelegt der
Mathematisch-naturwissenschaftlichen Fakultät
der
Universität Zürich
von
Urban B. Willi
von
Zürich ZH
Begutachtet von
Prof. Dr. Rüdiger Wehner
PD. Dr. Norbert Dillier
Prof. Dr. John J. Rosowski
2003
Dedicated to my dear parents
i
Acknowledgements
The present study was carried out at the laboratory of experimental audiology at the
Department of Otorhinolaryngology of the University Hospital of Zürich. My salary
and the entire equipment I used during these years were provided by the University
Hospital. Many thanks at this place to Professor Stefan Schmid, the head of the
department, who endeavored to accord me a fair salary.
Thanks to Professor Rüdiger Wehner who gave me the opportunity to complete this
doctoral dissertation. PD Dr. Norbert Dillier was my advisor. I thank him for his
suggestions, his confidence and the academic freedom I enjoyed during this study. I
learned to work self-dependent and self-critical, which is going to be a fundamental
advantage for my future work. Special thanks to Dr. John Rosowski who agreed to
offer his expert opinion.
I had the pleasure to work with excellent infrastructure. My workplace was always
equipped with a new and effective computer hooked up to a powerful and reliable
network. Thanks to Felix Beerli for the maintenance of this system and his support
when problems occurred. Thanks to Bill Gates who developed the miraculous
Windows software that allowed me to spend some more time in the office. He made
the impossible possible and easy things almost impossible.
The support of Dr. Heidi Felix and Dr. Anita Pollak was essential for this study, since
they provided the temporal bones. Without their help and effort this study would have
been impossible to accomplish. I thank them for their goodwill and patience. Many
thanks to Dr. Damien Sequeira, Dr. Wai Kong Lai and Dr. Michael Büchler, who
critically revised this thesis. Due to their input the manuscript was clearly improved. I
would like to thank Mattia Ferrazzini and Alex Huber for their advices, suggestions
and the interesting and long discussions we had, which broadened my horizon and
allowed me an insight into an engineers and a doctors way of thinking. Thanks to Dr.
H.A.C. Jacob (Laboratory of Biomechanics, University Hospital of Zürich-Balgrist) for
the exchange of ideas. I really appreciated his interest in my work and his
commitment.
And there are all these people who supported me in a personal way, especially
during hard times when frustration came up and no end was in sight. I enjoyed the
LEA-coffee group, the fervent and funny discussions we had there, which I will
definitely miss once I have left the lab. I enjoyed the political quarrels between
Michael Büchler and Felix Beerli, the cat stories of Belja Dillier-Bregnic, the design of
Norbert Dillier's multifunctional watch, the laughers of Simone Volpert, the long blond
hair of Franziska Conod and the dry comments of Olegs Timms (the latvian
p…hysicist). Thanks to Mattia Ferrazzini and Wai Kong Lai for their entertaining
discussions about their pretty little Apple devices. Thanks to Markus Schmid, the
ultimate specialist for any problem involving cables, capacitors, resistors and
whatever they are all called. Herbert Jakits taught me that engineers know much
more than I previously expected, and Hubert Hauschild, dramatically demonstrated
that driving a rusty nail into a piece of wood constitutes a great challenge, especially
for a physicist. Thanks to René Holzreuter for his fascinating lecture about solar
winds and magnetic fields during lunch. Unfortunately I could not consider his
Acknowledgements
ii
theories in this thesis. I am sure that Christoph Wille's virtual patient will soon be an
appreciated member of the LEA-group. Thanks to all of you for the good time we
spent together at and between work.
There is Alexander (Alexander Josef), a very close friend of mine. Many thanks to
you for the evenings we spent behind beer and cigars which provided me with
staying power for the next few weeks. The very non-scientific discussions we had
were a great balance to the rational and sometimes arid research work. I always
enjoyed your E-mails from the far countries, they detracted me from working ☺.
There is Andreas Heyland, the combatant on the other side of the planet. I really
enjoyed the time we spent together in Florida traveling around with your rusty
scrapcar; it always just made it.
There is Giovanna Pessi, my love. You gave me hope when I was down, you
embraced me when I was desperate and you dulcified my free time and the many
week ends we spent together. The time I spent with you is the best I can remember
and imagine. Thank you so much.
There are my parents, Doris and Jörg Willi. You gave me the opportunity to study my
favorite subject, Zoology. You always had confidence in me and supported me on my
way. My thank can not equal the good you have done for me, and whatever I
reached in the past and will reach in the future has its origin in your care, patience
and love.
Urban Willi
iii
Summary
The processing of an acoustic event along the way from the free sound field to the
perception by an individual involves the coaction of numerous complex mechanisms.
The complexity of the hearing apparatus caused the field of hearing research to split
up into several specialized research subfields. One of these subfields deals with
middle-ear mechanics. Goal of this research field is the comprehension of the
function and functionality of this structure. The tympanic membrane, the middle-ear
cavities and the ossicular chain with its muscles, joints, tendons and ligaments
compose the focus of this research.
It is generally believed that the middle ear is a mechanical system evolutionary
developed to overcome the great impedance mismatch between air and the inner
ear. The tympanic membrane converts dynamic pressure variations into mechanical
vibrations. The latter are transmitted to the inner ear by the ossicular chain. The
three-dimensional anatomy of the ossicular chain, its suspension in the tympanic
cavity and the two joints that connect the three ossicles play an important role during
sound transmission. In order to comprehend the dynamics of the ossicular chain,
vibration measurements have to be made directly on this structure. In vivo
measurements on the tympanic membrane and intra-operative measurements that
provide a limited access to the ossicular chain reveal no detailed insights about the
dynamics of the system. Therefore, as most studies on middle-ear dynamics, the
present study was also performed in human temporal bones.
Vibration amplitudes of the ossicles induced by sound pressure levels at the hearing
threshold are of atomic magnitude and in general very small for acoustic stimulation
at physiologically relevant sound intensities. Therefore, the investigation of middleear dynamics makes great demands on the measuring device. Laser Doppler
Vibrometry meets these requirements.
Goal of the present study was to qualitatively and quantitatively describe the
dynamics of the incudo-malleolar complex and the intermediate joint, since the
functionality of this joint is still disputed.
To do this, laser Doppler measurements were performed in 27 human temporal
bones. The middle ear was acoustically excited through an artificial external ear
canal. A multi-sine signal at a constant sound pressure level (90 dB) over the
frequency band between 0.5 and 10 kHz served as acoustic stimulus. Access to the
incudo-malleolar complex was attained through the middle cranial fossa, and all
middle-ear structures and the inner ear were preserved. Integrity of the inner ear was
essential, since the dynamic behavior of the middle ear significantly differs when
tested with and without the cochlear load. Motions of the incudo-malleolar complex
were recorded through the above mentioned access by means of Laser Doppler
Scanning Vibrometry.
The visualization of the dynamic behavior revealed that the incudo-malleolar joint
(IMJ) constitutes a flexible connection, which allows relative motion between the two
ossicles during sound transmission. To quantify the effect of the IMJ on sound
transmission the ossicular motion of each ossicles was mathematically split into three
motion components, one translation and two rotations. The coordinate system, the
Summary
iv
basis of the three degrees of freedom, was aligned with anatomical landmarks of the
ossicular chain.
The transfer functions were calculated for each motion component. They indicate the
amount of a certain motion component transmitted from the malleus to the incus and
the phase difference between them. A rotation about an axis passing through the
posterior incudal and the anterior malleal ligament turned out to be the dominating
motion component of the incudo-malleolar complex. The joint transmission (transfer
function) of this component showed minor losses of about 30% (-3 dB) at low
frequencies (< 1 kHz). Between 1 and 3 kHz the transmission decreased rapidly and
reached losses of 90 % (-20 dB) at higher frequencies (3 kHz < f < 10 kHz). Absolute
transmission values showed large variations between specimens, but the same
qualitative behavior was observed in all temporal bones.
The mathematical description of the ossicular motion allowed the motion
reconstruction of structures, which were not accessible during the measurement.
Precondition for this was that the structure belonged to one of the rigid-bodies
(malleus or incus), of which the dynamic motion was known. The motion of the umbo
and the tip of the long process of the incus, the lenticular process of the incus (LPI),
were reconstructed, because they approximately represent the input and output of
the middle ear. The ossicular transmission between the umbo and the LPI was
evaluated and revealed a picture very similar to that of the above described joint
transmission: Small transmission losses below 1 kHz, a rapid loss in transmission
between 1 and 3 kHz and high transmission losses between 3 and 10 kHz. The
ossicular transmission was also reflected by the transmission of sound from the
tympanic membrane to the LPI. The rapid increase of losses above 1 kHz was also
apparent in the sound transmission.
Sound transmission losses, which were caused by the mobility of the IMJ, were
calculated next. To do this, the IMJ was experimentally fixed. The gain in sound
transmission achieved by the joint fixation equaled the loss in sound transmission
caused by the mobility of the IMJ. At frequencies below 1.5 kHz no effects were
observed, whereas above that frequency an increasing transmission gain with
frequency appeared. Between 4 and 10 kHz, transmission gains of about +10 dB
were reached. This means that the mobility of the IMJ causes sound transmission
losses of similar magnitude.
Finally, possible effects of postmortem time (time span between death of the donor
and the end of the experiment), gender and age of the donor on sound transmission
were evaluated. The analysis revealed that sound transmission was neither
dependent on the gender of the donor nor on the post mortem time. However, at
higher frequencies (> 3 kHz) sound transmission tends to decrease with age; in order
to achieve conclusive results more measurements on temporal bones would be
required.
From the present study it can be concluded that the IMJ constitutes an elastic
component of the ossicular chain, which causes significant sound transmission
losses (about -10 dB) at higher frequencies (> 3 kHz). However, at the low
frequencies (< 1 kHz) sound transmission is not affected by the rigidity of the IMJ.
These insights must be considered in virtual middle-ear models, of which numerous
Summary
v
examples already exist. The goal of these models is to simulate the normal middle
ear in order to facilitate the development of middle-ear prostheses, which replace
parts of the ossicular chain, and to estimate possible effects of pathological changes
in the middle ear. This is only possible if the mechanical properties of each of the
numerous model components match those of the normal middle ear. Without
consideration of the elastic properties of the IMJ a model can not accurately simulate
the normal middle ear.
The present study could only describe the functionality of the IMJ, but not identify its
function. However, insights obtained from this study suggest that the IMJ was not
adapted for optimization of sound transmission. If an elastic element within the
ossicular chain is necessary for protecting the inner ear from high sound intensities
or static pressures, the sound transmission losses may be interpreted as an
inevitable side effect of this protection mechanism and the IMJ as a trade-off. It is
interesting that some animals secondarily loose the mobility of the IMJ during
ontogenesis. A comparative study between animals with a mobile and animals with
an immobile IMJ might reveal new insight about the benefit of a joint fixation and
maybe about the function of this joint.
vi
Zusammenfassung
Die Verarbeitung eines akustischen Ereignisses vom freien Schallfeld bis zur
Wahrnehmung durch ein Individuum erfordert das Zusammenwirken von vielen
komplexen Mechanismen. Die hohe Komplexität des Hörapparates hatte zur Folge,
dass sich die Hörforschung schon früh in verschiedene, spezialisierte Fachgebiete
aufteilte. Eines dieser Fachgebiete befasst sich mit der Mechanik des Mittelohres.
Ziel dieser Forschung ist das Verständnis der Anatomie und Funktion der
Mittelohrstrukturen. Das Trommelfell, die Mittelohrkavitäten und die Ossikelkette mit
ihren Gelenken, Muskeln, Bändern und Sehnen stehen im Zentrum dieser
Forschung.
Im Allgemeinen wird das Mittelohr als ein mechanisches System verstanden,
welches
im
Laufe
der
Evolution
zur
Überwindung
des
grossen
Impedanzunterschiedes zwischen Luft und Innenohr entwickelt wurde. Bei
akustischer
Stimulation
wandelt
das
Trommelfell
die
dynamischen
Druckschwankungen in mechanische Schwingungen um. Diese wiederum werden
von der Ossikelkette auf das Innenohr übertragen. Die dreidimensionale Anatomie
der Ossikelkette, deren Aufhängung in der Mittelohrkavität und die beiden Gelenke,
welche die drei Ossikel verbinden, spielen dabei eine wichtige Rolle. Um die
Dynamik der Ossikelkette zu verstehen, müssen Schwingungsmessungen direkt an
diesen Strukturen durchgeführt werden. Messungen in vivo am Trommelfell und
intra-operative Messungen mit stark beschränktem Zugang zu den
Mittelohrstrukturen erlauben keine genaue Beschreibung der dynamischen Vorgänge
im Mittelohr. Deshalb werden Messungen oft, wie auch in der vorliegenden Arbeit, an
Felsenbeinen vorgenommen.
Bei Schalldrucken nahe der Hörschwelle bewegen sich die Schwingungsamplituden
der Ossikel im atomaren Bereich und sind generell sehr klein bei physiologischen
Schalldrucken. Die Untersuchung des dynamischen Verhaltens des Mittelohres stellt
daher hohe Anforderungen an die Messinstrumente. Die Laser Doppler Vibromerie
(LDV) wird diesen Anforderungen gerecht.
Ziel der vorliegenden Arbeit war es, die Dynamik des Hammer-Amboss-Komplexes
und des dazwischen liegenden Gelenkes (Hammer-Amboss-Gelenk) qualitativ und
quantitativ zu beschreiben, da die Funktionalität insbesondere des Gelenkes
ungenügend geklärt ist.
Um der Frage nach der Funktionalität des Hammer-Amboss-Gelenkes nachzugehen,
wurden Laser-Doppler-Messungen in 27 menschlichen Felsenbeinen vorgenommen.
Über einen künstlichen Gehörgang wurde das Mittelohr akustisch angeregt. Ein
Multi-Sinus-Signal bei gleichbleibendem Schalldruckpegel über den Frequenzbereich
von 0.5 bis 10 kHz diente als akustischer Reiz. Über die mittlere Schädelgrube wurde
ein Zugang zum Hammer-Amboss-Komplex geschaffen, welcher es ermöglichte,
sämtliche Mittelohrstrukturen und auch das Innenohr zu erhalten. Letzteres ist sehr
wichtig, da sich das dynamische Verhalten des Mittelohres in An- und Abwesenheit
der kochleären Last massgeblich unterscheidet. Über den erwähnten Zugang wurde
die Bewegung des Hammer-Amboss-Komplexes mittels Laser-Scanning-DopplerVibrometrie aufgezeichnet.
Zusammenfassung
vii
Die Visualisierung der dynamischen Ossikelbewegung unmittelbar nach den
Messungen zeigte, dass das Hammer-Ambossgelenk eine flexible Verbindung
darstellt, welche relative Bewegungen zwischen den beiden Ossikeln während der
Übertragung von Schall zulassen. Um die Wirkung dieses Gelenkes bei der
Schallübertragung zu quantifizieren, wurden die Bewegungen für beide Ossikel
separat und mit Hilfe der dynamischen Festkörpergleichung in drei
Bewegungskomponenten, eine translatorische und zwei rotatorische, zerlegt. Das
Koordinatensystem, welches diesen drei Freiheitsgraden zugrunde liegt, wurde
anhand anatomischer Strukturen der Ossikelkette ausgerichtet.
Nun wurde die Übertragungsfunktion jeder Bewegungskomponente bestimmt. Diese
beschreibt einerseits den Anteil der entsprechenden Bewegung, die vom Hammer
auf den Amboss übertragen wird, und beinhaltet andererseits auch den
Phasenunterschied einer solchen Komponente zwischen den beiden Ossikeln. Als
dominierende Bewegungskomponente stellte sich eine Rotation um eine Achse
heraus, welche das posteriore Ambossband und das anteriore Hammerband
durchquerte. Die Übertragungsfunktion dieser Komponente zeigte bereits bei
niedrigen Frequenzen (< 1 kHz) Gelenk-Übertragungsverluste von ca. 30 % (-3 dB).
Zwischen 1 und 3 kHz nahmen diese Übertragungsverluste drastisch zu und
erreichten in den hohen Frequenzen (3 kHz < f < 10 kHz) bis zu 90 % (-20 dB). Die
absoluten Werte zeigten grosse Schwankungen zwischen den einzelnen
Felsenbeinen, aber qualitativ war dieses Verhalten in allen Felsenbeinen deutlich
erkennbar.
Die Beschreibung des Ossikelbewegung durch die dynamische Festkörpergleichung
erlaubte weiter, Bewegungen von Strukturen zu berechnen, welche während der
Messung nicht zugänglich waren. Dies bedingte, dass diese Strukturen Teil eines
Festkörpers waren, dessen Bewegung bekannt war (Hammer, Amboss). Interessante
Strukturen waren der Umbo und das Ende des langen Ambossfortsatzes, des
lentikulären Fortsatzes (LPI), da diese den mechanischen Input und Output des
Mittelohres annäherungsweise beschreiben. Die Ossikel-Übertragungsfunktion
zwischen Umbo und PLI konnte bestimmt werden, und es zeigte sich ein beinahe
identisches Bild wie für die Gelenk-Übertragungsfunktion der dominierenden
Bewegungskomponente: bereits kleinere Verluste bei Frequenzen unterhalb von 1
kHz, ein starker Anstieg der Verluste zwischen 1 und 3 kHz und hohe
Übertragungsverluste in Frequenzen zwischen 3 und 10 kHz. Die Verluste in der
Ossikel-Übertragungsfunktion spiegelten sich in der Übertragung von Schall auf den
LPI wider. Die starke Zunahme der Verluste oberhalb 1 kHz war auch bei der
Schallübertragung manifest.
In einem weiteren Schritt wurden die Schallübertragungsverluste, welche auf die
Beweglichkeit des Hammer-Amboss-Gelenkes zurückzuführen waren, quantifiziert.
Dazu wurde das Gelenk experimentell fixiert. Die Gewinne in der Schall-Übertragungsfunktion hervorgerufen durch die Fixierung des Gelenkes können mit dem
Verlust in der Schallübertragungsfunktion, der durch die Beweglichkeit des Gelenkes
verursacht wird, gleichgesetzt werden. Bei Frequenzen unterhalb von etwa 1.5 kHz
konnten keine Effekte beobachtet werden. Oberhalb dieser Frequenz jedoch wurde
ein mit der Frequenz zunehmender Gewinn festgestellt. Zwischen 4 und 10 kHz
Zusammenfassung
viii
erreichte Letzterer Werte von ca. +10 dB. Dies bedeutet, dass die Beweglichkeit des
Hammer-Abmoss-Gelenkes bei höheren Frequenzen Schallübertragungsverluste in
demselben Masse hervorrufen.
Schliesslich wurden mögliche Effekte von post-mortaler Zeit (verstrichene Zeit
zwischen dem Tod des Spenders und dem Ende des Experimentes), Geschlecht und
Lebensalter der Spender auf die Schallübertragung untersucht. Es zeigte sich, dass
die Übertragung von Schall weder vom Geschlecht des Spenders, noch von der
post-mortalen Zeit beeinflusst waren. In den hohen Frequenzen (> 3 kHz) zeichnete
sich jedoch eine Tendenz ab, die auf einen altersabhängigen Schalleitungsverlust
hinweisen könnte; um schlüssige Ergebnisse zu erhalten, muss eine grössere Anzahl
von Felsenbeine untersucht werden.
Aus der vorliegenden Studie kann man schliessen, dass das Hammer-AmbossGelenk eine elastische Komponente in der Ossikelkette darstellt, welche bei der
Übertragung von Schall in den hohen Frequenzen (>3 kHz) zu beträchtlichen
Schallübertragungsverlusten (ca. -10dB) führt. In den tiefen Frequenzen (< 1 kHz)
beeinflusst die Beweglichkeit des Gelenkes die Übertragung von Schall jedoch nicht.
Diese Erkenntnisse müssen bei der Entwicklung virtueller Mittelohrmodelle, von
denen es bereits eine Vielzahl gibt, berücksichtigt werden. Diese Modelle haben zum
Ziel, das Mittelohr getreu zu simulieren, um die Entwicklung von Mittelohrimplantaten
zu erleichtern und Effekte pathologischer Veränderungen im Mittelohr abzuschätzen.
Dies ist nur möglich, wenn sämtliche Komponenten eines solchen Modells in ihren
mechanischen Eigenschaften mit denen des natürlichen Mittelohres übereinstimmen.
Ohne die elastische Komponente des Hammer-Amboss-Gelenkes kann das
menschliche Ohr nicht getreu simuliert werden.
Die Studie konnte lediglich die Funktionalität des Hammer-Amboss-Gelenkes
beschreiben, nicht aber deren Funktion. Die Erkenntnisse der vorliegenden Studie
lassen aber schliessen, dass diese Struktur nicht zur Optimierung der Schallleitung
entwickelt wurde. Wenn zum Schutz des Innenohres vor sehr hohen Schalldrucken
und statischen Drucken eine elastische Komponente in der Ossikelkette notwenig ist,
könnten die Schallübertragungsverluste als unabwendbare Nebeneffekte dieses
Schutzmechanismus interpretiert, und das Gelenk als so genannter "trade-off"
bezeichnet werden. Interessant in diesem Zusammenhange ist, dass bei gewissen
Tieren die Beweglichkeit des Hammer-Amboss-Gelenkes während der Entwicklung
verloren geht. Eine vergleichende Studie zwischen Tieren mit beweglichem und
Tieren mit unbeweglichem Gelenk könnte Aufschluss über den Nutzen einer
sekundären Gelenksfixierung und vielleicht sogar über die Funktion des Gelenkes
geben.
ix
Contents
I
Introduction ........................................................................1
I.1
I.2
I.3
II
Middle-ear research ...............................................................................1
Motivation and goal................................................................................2
Thesis outline .........................................................................................3
Background ........................................................................5
II.1
Traits of sound .......................................................................................5
II.2
Evolution of hearing...............................................................................7
II.2.1 Evolution of the inner ear................................................................8
II.2.2 Evolution of the middle ear .............................................................9
II.3
Anatomy ................................................................................................11
II.3.1 External ear ................................... Fehler! Textmarke nicht definiert.
II.3.2 Middle ear .......................................................................................13
II.4
Function of the ear ...............................................................................19
II.4.1 External ear ................................... Fehler! Textmarke nicht definiert.
II.4.2 Middl -ear ........................................................................................22
II.5
Review of IMJ-functionality .................................................................27
III Materials & methods........................................................35
III.1Setup..........................................................................................................35
III.1.1 Laser Doppler Vibrometry (LDV)...................................................35
III.1.2 Software and steering....................................................................37
III.1.3 Positioning system ........................................................................40
III.2 Temporal bones....................................................................................42
III.2.1 Temporal bone preparation...........................................................43
III.3 Acoustic stimulation ............................................................................45
III.3.1 Choice of signal type .....................................................................45
III.3.2 Sound calibration...........................................................................46
III.4 Measurements ......................................................................................48
III.4.1 SPL recordings ..............................................................................48
III.4.2 LSDV measurements .....................................................................49
III.4.3 IMJ-fixation .....................................................................................51
III.5 Data analysis ........................................................................................53
III.5.1 The coordinate system ..................................................................53
III.5.2 Degrees of freedom .......................................................................57
III.5.3 Measurement point selection........................................................59
III.5.4 The rigid-body motion equation ...................................................61
III.5.5 The displacement reconstruction of 'hidden' structures ...........63
IV Control experiments ........................................................64
IV.1 Accuracy of Laser Doppler Measurements........................................65
IV.1.1 Reflectance and the use of silver powder....................................65
IV.1.2 Signal-to-noise ratio ......................................................................68
IV.1.3 Signal enhancement ......................................................................69
IV.2 Numbers of points analyzed................................................................71
IV.3 Undetected motion components.........................................................73
Contents
IV.4
IV.5
IV.6
IV.7
V
x
Motion component contribution .........................................................75
Coherence of joint and ossicular transmission.................................77
How representative are IMJ-measurements? ....................................78
Insights from control experiments .....................................................81
Results ..............................................................................82
V.1 Dynamics of the umbo .........................................................................84
V.1.1 Symmetry of umbo displacement.................................................84
V.1.2 Linearity of umbo displacement ...................................................86
V.1.3 Baseline measurement ..................................................................88
V.1.4 Opening of MEC .............................................................................89
V.2 Ossicular motion ..................................................................................91
V.2.1 Qualitative approach......................................................................91
V.2.2 Quantitative approach ...................................................................94
V.3 Middle-ear transmission ......................................................................98
V.3.1 Joint transmission .........................................................................98
V.3.2 Ossicular transmission ...............................................................101
V.4 Experimental fixation of the IMJ .......................................................105
V.4.1 Control ..........................................................................................105
V.4.2 Changes in ossicular transmission............................................107
V.4.3 Changes in sound transmission.................................................108
V.4.4 Transmission gain by IMJ-fixation .............................................109
V.4.5 The three motion components after IMJ fixation ......................111
V.5 Effects of age, gender and post mortem time..................................113
V.5.1 Age ................................................................................................114
V.5.2 Gender ..........................................................................................115
V.5.3 Post mortem time.........................................................................116
V.6 The cochlear load...............................................................................117
VI Discussion& Conclusions.............................................119
VI.1 Validity of applied techniques...........................................................119
VI.1.1 Validity of temporal bone measurements ..................................119
VI.1.2 Applicability of the measurement system .................................121
VI.1.3 Use of silver powder and the "signal enhancement" feature...121
VI.1.4 Accuracy of applied analysis techniques ..................................122
VI.2 Explanation of findings......................................................................123
VI.2.1 Symmetry & linearity ...................................................................123
VI.2.2 Umbo displacements ...................................................................124
VI.2.3 Ossicular motion..........................................................................126
VI.3 Related literature ................................................................................128
VI.3.1 Contradictions to previous studies ............................................128
VI.3.2 Agreements with previous studies.............................................131
VI.4 Middle-ear sound transmission ........................................................133
VI.5 Fixation of the IMJ..............................................................................135
VI.5.1 Effect of IMJ-fixation....................................................................135
VI.6 Possible IMJ function ........................................................................136
VI.7 The effect of age.................................................................................137
VI.8 Conclusions........................................................................................139
Contents
xi
VII Future work ....................................................................141
VII.1
VII.2
VII.3
VII.4
Complete middle-ear transmission...................................................141
Age effects ..........................................................................................141
Function of IMJ...................................................................................142
Clinical interest...................................................................................142
Appendix ...............................................................................146
References ............................................................................147
1
Chapter I
I
Introduction
I.1
Middle-ear research
Understanding the hearing system is a complex subject involving the fields of
acoustics, mechanics, physiology and psychology. The beginning of hearing
research goes back more than 200 years. Researchers first looked at the complex
anatomy of the ear, and very soon came up first considerations about the mechanics
of the middle ear. Micromechanics and physiology of the inner ear followed. The
research field became so multi-faceted that it was divided into several research
subfields.
The field of middle-ear mechanics is one of them and it focuses on the principles of
sound transmission from the free field to the entrance of the cochlear capsule. This
involves the transmission of sound from the free field to the tympanic membrane, the
absorption of sound energy by the tympanic membrane, its transition to vibration and
how this vibration is transmitted to the ossicular chain and then along this chain to
the inner ear. The diversity of the middle-ear structures in the animal kingdom is
fascinating. The niche occupied by the organism makes different demands on the
hearing system which is apparent in the variety of middle-ear structures among
recent vertebrates. Mammals developed a three-ossicle ear, whereas birds, reptiles
and amphibians possess a one-ossicle ear. Besides the number of ossicles involved,
the ossicular arrangement also significantly differs. The one-ossicle ear bridges the
gap between the tympanic membrane and the oval window by a more or less straight
bone, the columella. The ossicular chain of the three-ossicle ear leads to an angle
formed by the malleus and incus. It is generally believed that this mammalian
adaptation enables the detection of higher frequencies (Heffner & Heffner 1992).
However, the appearance of the three-ossicle ear was also accompanied by two
middle-ear joints: The IMJ between the malleus and incus and, secondly, the incudostapedial joint between the incus and stapes. The exact role and functionality of
these joints is still unknown but many hypotheses are put forward.
An important field of middle-ear research involves the development of prostheses
replacing parts of the ossicular chain. Many virtual middle-ear models were
Introduction
2
developed in order to facilitate the development of such prostheses (Wada 1992,
Bornitz 1994, Dresch 1998, Beer 1999). The idea of such models is to rebuild the
middle ear and to simulate its functionality. If the dynamic behavior of each
component of such a model reflects the dynamic behavior of the corresponding
components in the living ear, the model can be considered to be valid. However, this
is the week point of most models: The complete model usually reflects the
functionality of the complete normal middle-ear pretty well, but when certain
components cease to exist as it may happen in vivo (e.g. the loss of the stapes
crura), the dynamics of these models often significantly deviate from the in vivo
situation. This indicates that complete models were fitted in order to match the
dynamics of the complete middle-ear system. Degradation of the mechanical system
and replacement of certain components do not precisely simulate the living ear and
the effect of a certain prosthesis tested in the model can not be applied to the living
ear. Therewith, the initial target of such models is missed.
One component of the middle ear, which is often ignored in virtual middle-ear
models, is the IMJ. In most models the malleus and incus are firmly attached to each
other and operate as one unit. If this is not the case in vivo, other parameters of the
model need to be adjusted in order to compensate for that missing elastic element.
Compared to the in vivo situation the adjusted parameters are false. If any other
parameters are experimentally changed in such a model, effects of the false
parameters appear.
The debate about the functionality of the middle-ear joints goes back to the 19th
century and is still afoot. A short review is given in section II.5. The behavior of the
IMJ when exposed to dynamic pressure variations was experimentally investigated
by several researchers, but their conclusions are conflicting. All of these studies were
performed on human temporal bones. Due to the low sensitivity of most
measurement techniques applied, the experiments were usually performed at very
high sound pressure levels and at low frequencies. The examined middle ear was
therewith forced to act far above its normal operating range. At such high stimulation
intensities, the functionality of the middle ear might significantly deviate from its
normal operation. Moreover, the complexity of the dynamic behavior of a mechanical
system involving multiple degrees of freedom is supposed to increase with
frequency. The measurement techniques applied in most former studies did not allow
the investigation of middle-ear dynamics at physiological sound pressure levels, and
results at higher frequencies (> 1 kHz) are rare.
I.2
Motivation and goal
One very recent study by Decraemer & Khanna (2001) was based on Laser Doppler
Vibrometry (LDV), a technique much more sensitive compared to the techniques
used in former studies that investigated the dynamics of the IMJ. They observed
substantial slippage between the malleus and incus even at low frequencies. The
study was only performed in two temporal bones (one donor), and the authors were
careful with the interpretation of their findings.
Introduction
3
If the IMJ indeed constitutes a loose connection between the malleus and incus, this
will have a definite impact on the understanding of middle-ear function. It is generally
accepted that the IMJ yields to the large forces of static pressure differences that
occur between the middle ear and the ambient air, but there is dissension for
dynamic stimuli. An argument often brought forward by authors that contend the
theory of a rigid incudo-malleolar complex is that the mobile IMJ would be in conflict
with the optimal transmission of sound, for which function the middle ear was
originally developed for. The argumentation implies that biologically a structure is
adapted to perform one single task. However, this is often not the case. Adaptations
are limited by physiological constraints and structures often have to perform several
tasks. Besides optimal sound transmission through the middle ear, the ossicular
chain may need to offer a protection mechanism for the inner ear. If such a protective
mechanism involves elastic elements within the ossicular chain, sound transmission
losses might be an inevitable side effect.
It is the goal of this study to develop an appropriate technique in order to answer the
question as to whether the IMJ is functionally mobile or immobile at physiologically
relevant sound pressure levels and frequencies. The technique shall be minimally
invasive and highly sensitive, and reveal a detailed insight into the dynamics of the
incudo-malleolar complex. The functionality of the IMJ and its effects on the sound
transmission through the middle ear shall be quantitatively evaluated in order to
provide data which can later be applied to virtual middle-ear models.
Hereby, the author hopes to definitely resolve the doubts about the functionality of
the IMJ and to make a significant contribution to the understanding of middle-ear
function.
I.3
Thesis outline
The thesis is structured as follows:
•
Chapter II (Review) introduces the reader to the subject of hearing. The
involved structures of the human hearing system are anatomically described
and their function explained as far as current knowledge allows.
Special attention is paid to the mechanics of the middle ear. The research of
the last ~150 years dealing with middle-ear mechanics with respect to the
functionality of the IMJ is briefly reviewed in a separate section.
•
In chapter III (Materials & methods), the preparation and use of temporal
bones, the setup, and the measurement and analysis techniques applied are
all described in detail. Amongst other things, this involves a positioning system
for the temporal bones, the principle of the Laser Scanning Doppler
Vibrometer (LSDV) and the acoustic stimulation.
•
Chapter IV (Control experiments) presents the various control experiments
that were performed in order to verify the accuracy of the measurement setup
and the reproducibility of the acquired data.
Introduction
4
•
In chapter V (Results) the qualitative and quantitative results of this study are
described.
•
In chapter VI (Discussion & Conclusion) the results are critically discussed.
They are compared to the findings of earlier studies. The scientific value of the
latter and their explanatory power are estimated. Finally, conclusions are
carefully drawn.
•
The final chapter of this thesis, chapter VII (Future work) provides an outlook
on possible future projects which, subsequent to this thesis, expand the
understanding of the human middle-ear mechanics with special concern
regarding IMJ functionality and function.
5
Chapter II
II
Background
The aim of this chapter is to provide an introduction into hearing, especially for those
readers who are not familiar with this field. It starts with very general considerations
about sound, roughly depicts evolutionary, anatomical and functional aspects of the
various structures involved in sound perception and, finally, leads over to more
detailed views on the functionality of the middle-ear ossicles.
Insights into the evolutionary aspects were gathered from the extensive review on
"Evolutionary Biology of Hearing" (1992) by Webster, Fay and Popper.
II.1
Traits of sound
Three senses can be used by organisms for communication (intended and
unintended) over distance: smell, vision and hearing (including the detection of
airborne sound and substrate vibrations). Generally all vertebrates are equipped with
sensory organs for these three sensory modes. Why is this so? And why is a
specialization in any of the three sensory organs usually connected to the
characteristics of the environment the organism inhabits? Because each of the
sensory modes has different peculiarities and qualities, and the conditions set by the
environment promotes one or the other of the three sensory modes.
The predator-prey interaction was the driving force for many evolutionary innovations
and adaptations, because the success of the organism in either obtaining something
to eat or avoiding being killed is essential for its survival. Coevolution, with which prey
and predator faced each other, coveres many evolutionary aspects: strength and
thickness of plating against strength of jaws and length of teeth; maximal speed of the
prey against maximal speed of the predator; detecting the predator before the
predator is too close versus approaching the prey before it is warned by the predators
Background
6
presence, to mention just a few. The following considerations about the traits of the
three sensory modes are focused on the predator-prey interaction.
•
Smell spreads slowly and in a very diffuse way, and the direction of
propagation and spread is highly affected by wind. Downwind the scope of a smell
can be huge, but smell can not propagate upwind at all. It circumvents obstacles and
it can mark the presence of an organism over a long period.
•
Light travels extremely fast, and its propagation is not affected by wind but by
obstacles (including dust and fog). In a clear medium that has a continuous density,
light travels in a straight line and, therefore, does not circumvent obstacles. The
straight projection of light enables a precise localization of its source (emitting or
reflecting source). The reflected light of the environment, which usually carries the
information of interest, changes continuously and only reflects an instant. The
availability of light varies with the weather, time of day and season.
•
Sound (airborne sound), in relation to the maximal speed organisms can
reach, travels very fast and partly circumvents obstacles. Partly, because the amount
of attenuation caused by an obstacle depends on the wavelength of sound. The same
is true for the propagation of sound in an open field: long wavelengths (low
frequencies) are less attenuated over distance than short wavelengths. Sound falls
silent shortly after its emission.
The smell of a prey attracts the predator and the smell of a predator cautions the prey
about the present danger. This works well for the organism standing upwind.
Predators learned to approach their prey upwind. The prey must detect the predator
independent of the wind direction and, at close range, the predator should perceive
the position of the prey precisely. Vision constitutes a good supplement for both
organisms. In diurnal predators and potential prey, the sense of vision is usually
highly developed. For the diurnal predator both senses allow the detection of prey
over a large distance (up-wind), enabling it to approach it, determine its precise
position, observe its behavior and attack. Potential prey in an open field can notice
the presence of a predator before the latter comes up to close range and independent
of the direction of wind.
The perception of visual information usually requires the attention of an organism.
Visual information can only be gathered within the field of view. Grazing prey, which
spends a large amount of time feeding, needs an alert system which warns the
animal also in its feeding position (head down). In this position the animal can not
survey the area. For animals that spend most of the time grazing in the open field, an
acoustic alarm system is advantageous because visually surveying an area is an
active process which distracts the animal from grazing. Some animals that graze in
groups post a sentinel, which surveys the area while the rest of the group is
unconcernedly grazing. But for solitary animals the acoustic alarm system becomes
absolutely essential. Large pinnas were often developed, sound collectors that allow
an early detection and localization of a potential danger. In some species the pinnas
became highly maneuverable which even refined the localization performance. Vision
alone provides insufficient cues for animals that inhabit areas with close vegetation.
Background
7
During its approach, a predator can hide behind obstacles, such as a tree or a shrub,
and the prey will not notice it. Sound circumvents these obstacles, and the
unmolested approach of the predator is defeated. At night the availability of light is
drastically reduced but the trait of sound is maintained. Under these circumstances
predator and prey highly depend on hearing. The darkness of night makes precise
localization by vision difficult or impossible, and since smell has the wrong traits for
accurately localizing its source, hearing becomes essential at night. The development
of directional hearing implies several specializations. Monaural cues depend on
variations in the frequency spectrum. High frequencies provide better cues for
acoustic reflections and attenuation, which are produced by the fine structure of the
pinna. The pinna attenuates sound coming from the back, and its fine structure alters
the frequency spectrum of a sound depending on the elevation of the sound source.
Inter-aural differences generally provide directional cues of the azimuth. In small
animals inter-aural time differences are too short due to the small size of the skull.
Therefore, inter-aural differences bear on the attenuation of sound by the skull, to
which only high frequencies are susceptible. High-frequency hearing, and the
development and structural refinement of the pinna constitute important adaptations
in order to improve directional hearing (Heffner & Heffner, 1992).
These short and sketchy considerations clearly show how important and also how
different the three senses are. The niche occupied by the organism outweighs the
significance of a certain sensory mode. Depending on the formation of the
environment, the distribution of food, and to a great degree, the availability of light,
one or the other sensory mode will be promoted. For early and precise detection of
another organism, maximal sensitivity and high-frequency hearing are crucial. The
transmission of the relevant sound spectrum from the environment to the sensory
organ constitutes a limiting factor. The mechanics of the middle ear discussed in this
study play a significant role in the process of sound transmission. Especially, the
transmission of high frequencies creates high demands on the mechanics of the
middle-ear structures.
II.2
Evolution of hearing
Trying to appoint the first appearance of hearing in the history of evolution is difficult.
The sense of hearing is enabled by mechano-receptors (hair cells). The existence of
mechano-receptors is highly prevalent in the animal kingdom, and they perform a
variety of tasks which enable sensory modes different from hearing: stretch, pressure,
bending detection and more. But to draw a border line between certain modes of
senses based on mechano-receptors is sometimes very difficult. For example, when
sound pressure is high enough even pressure receptors of the skin or bending
receptors at the base of bristles will detect it. This points out how difficult it is to
define what hearing exactly means. Since this work deals with the hearing system of
a terrestrial mammal, the homo sapiens, a definition on the sense of hearing can be
given for this vertebrate class subgroup: "Terrestrial mammals possess a hearing
apparatus, which is composed of an external ear, a TM, an ossicular chain and a
Background
8
cochlea containing the sensory epithelium. Hearing is the perception of airborne
sound pressure waves or substrate vibrations and involves the structures mentioned
afore." This definition also encloses bone conduction since it functionality implies the
contribution of the middle-ear structures.
A short summary of some important evolutionary steps concerning the hearing
system of terrestrial mammals is given in the following section.
II.2.1
Evolution of the inner ear
The origin of the sensory epithelium of the inner ear goes back to the canal system of
the earliest vertebrates. This canal system was partly exposed on the body surface
and partly deep in the head with one or two semicircular canals, but both were in
contact with each other. The exposed canal system is still present in modern fish and
amphibians and allows the organisms to perceive motion in the surrounding medium
(water). A process of involution of the anterior part of the canal system into the skull
isolated these parts from the surrounding media and built the inner ear during the
early evolution of vertebrates. This enabled the perception of the own body motion
undisturbed from ambient turbulences. During Ontogenesis of modern vertebrates
this involution can still be observed, and the homology of the lateral canal system and
inner ear is beyond dispute: the types of receptor cells are identical in both sensory
organs, and their nerve branches enter the same brain area.
In a further development of the inner ear, three semicircular canals were built in order
to detect rotations about the three rotational body axes. The sensory cells, hair cells,
need to be bent by the motion of the surrounding medium in order to produce action
potentials. Since the vestibular system is based on the inertia of lymph fluid, it could
easily work when totally embedded in an osseous capsule. A pressure wave, in
contrast, does not produce motion in an incompressible medium. Although under
water pressure waves easily penetrate the body of an organism, this pressure must
first be transformed into fluid motion. A first form of this transformation was probably
realized by some early fish, as Weberian ossicles transferring the vibrations of the
bladder to the inner ear. Since gas is compressible, an arriving pressure wave will
alter the size of this gas-filled space. The Weberian ossicles are in contact with the
bladder and the inner ear and, therewith, vibrations of the bladder are transmitted to
the inner ear and set the inner ear fluid in motion. A gas chamber close to the inner
ear constitutes another solution, and some ancestors of terrestrial vertebrates show
this type of pressure-motion transformer, the progenitor of the middle ear. By
introducing a compressible medium between the external water and the inner ear
fluid, a pressure wave of the surrounding medium can be transformed into fluid
motion in the inner ear.
Background
II.2.2
9
Evolution of the middle ear
Tracing the phylogenetic development of the hearing system, the middle ear turns out
to have evolved as an adaptation to airborne sound when animals started to colonize
land (Wever and Lowrence 1954; Killion and Dallos 1979; Dallos 1984; Rosowski et
al. 1986).
During the transition from water to land, the hearing system faced a new situation.
The acoustic properties of the new surrounding medium (air) became the main
problem. Now, airborne sound waves were mainly reflected from the body surface
and did not even reach internal structures. The consequence of this problem was the
adaptation of a structure that equalizes the differences of acoustic properties in the
two media, allowing sound pressure waves somehow to enter the head. The
invention of a gas chamber close to the inner ear by ancestors of terrestrial
vertebrates might have been an important step during the phylogeny of the middle
ear, but another essential process is the prehistory of the jaw articulation. Most of the
evolutionary steps undergone by certain jaw bones along the middle-ear phylogeny of
recent tetrapodes constitute an adaptation to mechanical functionality of the jaw, and,
not, in the first instance, an adaptation to a sound conducting apparatus.
Ancestral fishes were jawless and somewhat similar to today's agnathans. From the
anterior gill arch, later fish developed a primitive jaw consisting of the lower Meckel's
cartilage and the upper palatoquadrate cartilage. The articulation of this primitive jaw
was supported by the second gill arch (hyomandibula). The modification of the jaw
and the development of the primary jaw joint produced redundancy in the function of
the hyomandibula. In non-mammalian tertrapodes the jaw joint is still formed by the
articulation of the quadrate (ossified part of the palatoquadrate) and articulare
(ossified part of the Meckel's cartilage). The hyomandibula became free from the jaw.
When vertebrates sized the land they moved into a surrounding media (air) with
different acoustic properties. Sound waves traveling through the air did not easily
enter the organism, but were mainly reflected from its surface. The earliest land
vertebrates had relatively weak limbs at the side of the body, and most vibration and
sound energy that reached the inner ear did so through the parts of the body in
contact with the ground. Since water is nearly incompressible, soft windows were
needed in order to allow fluid to move. The hyomandibula was close to these
windows, and it is likely that fluid motions became even greater when those two
structures (one of the windows and one hyomandibula) made contact. The freely
suspended ossicle might have vibrated out of phase with the rest of the skull and,
therewith, caused relative motion between the skull and the ossicle, inducing fluid
motion in the inner ear.
The association between the inner ear and a relatively freely moving ossicle was now
demonstrated and, henceforth, the course of evolution implied a series of
modifications of the involved structures: The position, embedding and suspension of
the hyomandibula changed, and the ossicle moved more and more freely. It is likely
that this system was not designed for broadband hearing but rather acted as a simple
resonator reducing the ears sensitivity to a small frequency band. An ear cavity was
developed which gave rise to a variety of elaborate suspensions of the hyomandibula.
Background
10
The coupling between the inner ear and the ossicle became tighter. The final
adaptation that enhanced the detection of airborne sound was the development of a
thin membrane facilitating the transition of sound pressure waves into ossicular
vibration. Whether the TM is homologous among terrestrial vertebrates is still an
issue. Some authors suggest that amphibians, reptiles and ancestors of mammals
developed this structure independently (Lombard and Bolt, 1979). If their assumption
is correct this accentuates the inevitable necessity of a TM for the detection of
airborne sound. Even though independently developed, the middle ears of
amphibians, reptiles and birds are similar in shape and function, and are, therefore,
characterized as "single ossicle ears". The hyomandibula has been modified into an
elaborate middle-ear ossicle comprising two subcomponents, the columella, the
ossified footplate-bearing proximal portion, and the extracolumella, the cartilaginous
distal portion. The columella occupies the oval window and the extracolumella is
attached to the TM and the tympanic ring.
The ancestors of mammals invented the secondary jaw joint formed by the dentary
and the squamosal. Again two ossicles, the quadrate and the articulare, became free
from the jaw and were introduced into the middle ear (classic theory). The quadrate
was modified into the incus and the articulare evolved into the malleus. The columella
retained its position in the oval window and was modified into the stapes. The "threeossicle ear" was developed and became an attribute of mammals. The primary jaw
joint is still conserved in the mammalian middle ear and due to its location is called
the IMJ.
This delineation of the sequence of evolutionary events is the "standard view" (classic
theory), which was reviewed by Henson (1974). Thereafter, the mammalian middle
ear derived progressively from the "primitive" amphibian middle ear through the
"advanced" single-ossicle ear of reptiles and birds, and was finally accomplished by
the three-ossicle ear of mammals. A more recent theory, the "alternative view", says
that the mammalian middle ear evolved independently (Allin 1975; Bolt and Lombard
1991; Allin and Hopson 1992). One of the three middle-ear types of recent mammals
characterized by Fleischer (1978) is the "microtype". Rosowski (1992) points out that
the middle ear of Morganucodon (an early transitional mammal) "closely resembles
the "microtype" middle ear of some mammals but clearly differs from the ears of
modern birds or reptiles". Allin (1975) notes that "the mammalian jaw apparatus
passes through fetal stages strikingly similar in morphology to adult advanced
Cynodonts", which are immediately ancestral to mammals. This supports the idea
that the three-ossicle ear of mammals did not evolve like proposed in the classic
theory but rather independently.
Good arguments can be brought forward for the alternative view, such as the course
of the facial nerve and the complicated and rather improbable process of introducing
two ossicles between the columella and the TM. However, the driving force for the
evolutionary development of both middle-ear types was most likely the same: Facing
the new medium (air), when animals sized the land, required the development of a
structure that allowed efficient transformation of airborne sound pressure waves into
vibrations of the cochlear fluid.
Background
II.3
11
Anatomy
The hearing system is not only complex in its function but also in its anatomy. The
goal of this chapter is to give a gross overview of the anatomy of the entire ear and a
more detailed description of the middle ear, which is subject of the present study. The
nomenclature used is this anatomical description is maintained throughout the
manuscript.
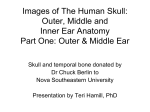
Three basic parts compose the ear, the external, middle and inner ears (Fig. II.1).
The external ear comprises the pinna and the external ear canal. The middle ear
cavity (MEC) is separated from the external ear by the TM and contains the ossicular
chain. A solid bony capsule, the cochlea, encloses the sensory epithelium. This is the
most peripheral part of the auditory sensory pathway as well as the most proximal
part containing vibration transmitting structures.
The anatomical description in this chapter is listed along the structures passed by a
sound wave transmitted from the environment to the inner ear. The description of the
auditory neuronal network was omitted due to its remote relevance in this study.
Fig. II.1: The auditory
pathway is structurally
divided
into
three
compartments:
the
external-, the middleand the inner ear. The
external ear comprises
the pinna and the
external ear canal. The
middle-ear contains the
tympanic
membrane,
the ossicular chain and
the tympanic cavity.
The cochlea houses the
sensory cells. It is the
most peripheral part of
the auditory sensory
pathway and the most
proximal
mechanical
part of the sound
transmitting apparatus.
drawing modified after
Sobotta.
Background
II.3.1
External ear
II.3.1.1
The pinna
12
The external ear is composed of the pinna (or auricle)
and the external ear canal. The pinna is the only visible
portion of the ear. Except for the lobule, the inferior soft
part of the pinna, its internal structure is composed of
cartilage partly entering the external ear canal. Figure
II.2 illustrates the right pinna of a man and the most
prominent structures are labeled. The most peripheral
rim of the pinna, the helix, gives way inferiorly to the
lobule, a soft appendix which is free from cartilage. The
central depression of the pinna, the concha, is dorsally
defined by the antihelix, inferiorly by the antitragus and
the notch and ventrally by the tragus. Ventrally, the
concha is bowl-shaped and gives way to the entrance of
the external ear canal. From the lateral side, the view
on the entrance of the canal is partly or totally masked
by the tragus. On the dorsal side of the pinna, some
rudimentary muscles connect the cartilage to the
temporal bone. In humans, the maneuverability of the
pinna lost its relevance and, therefore, these muscles
became vestigial.
II.3.1.2
Fig. II.2: Anatomy of the
right pinna of a man.
Except for the lobule, the
pinna
constitutes
a
complex
cartilaginous
formation covered by skin.
External ear canal
The skin that sheets the pinna gives way to the external ear canal. The canal is a
tube residing immediately posterior to the jaw articulation and medially advancing into
the deeper parts of the temporal bone where it is terminated by the TM. The center
line of the canal describes an S-like pathway (Fig. II.3). Cartilage of the pinna
supports the distal third of the canal. This region contains hairs and carries both
sebaceous (oil) and ceruminous (wax) glands. By creating a repelling medium for
bacteria and fungi they prevent infections. The proximal two thirds of the canal are
supported only by the bony canal. Several bones are involved in forming the canal,
the tympanic, the squama and the condyle of the mandible. No glands are found in
the distal part of this region, and the skin becomes thinner towards the TM.
Fig. II.3: Gross shape of the ear canal.
The external ear canal describes an Slike pathway from the entrance to the
TM. The TM separates the external ear
canal from the middle-ear cavity and is
inserted at an angle of approximately
55°. Drawing modified after Stinson
(1989).
Background
II.3.2
13
Middle ear
Concerning the size of a middle ear, a relatively large number of structures are
macroscopically identifiable. Its description shall also be a guide for the nomenclature
used in this thesis and for the three dimensional orientation of the structures involved.
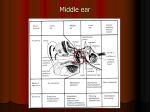
A series of pictures are presented in figure II.4 in order to make the orientation of the
middle-ear structures within the skull clear.
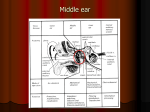
Fig.
II.4:
Middle-ear
anatomy of a right human
ear. The series of pictures
(c-g) show the continuous
degradation of the middleear from the lateral side.
Pictures b-h of this figure
are anatomically aligned
with the schematic skull
shown in picture a. White
circles depict the TM.
aml: anterior malleal ligament; ct: chorda tympani; epr: epitympanic recess; eut:
Eustachian tube; fn: facial nerve; I: incus; imj: incudo-malleolar joint; lmp: lateral
malleal process; lpi: lenticular process of incus; M: malleus; ma: manubrium; p:
promontory; pf: pars flaccida; pil: posterior incudal ligament; pt: pars tensa; sm:
stapedial muscle; sml: superior malleal ligament; spi: short process of incus; st: stpes;
ttm: tensor tympani muscle; rwn: round window niche; ta: tympanic annulus; tc:
tympanic cavity; tm: tympanic membrane; u: umbo; (asterisk) lateral malleal ligament.
Background
14
All pictures are aligned with the skull depicted in figure II.4a and illustrate the
anatomy of the right ear. In picture b the external ear canal was widened in order to
give visual access to the TM from the lateral side. The sequence of the pictures (c-g)
shows the continuous degradation of middle-ear structures from the lateral side. The
TM is still maintained in picture c and structures visible from the lateral side are
labeled. Pictures c-g allow an insight into the MEC, which resides behind the TM.
Besides other structures, the three auditory ossicles, ligaments and tendons are
termed. The white circles sketch the outline of the TM. Finally, the two portions of the
MEC, the epitympanic recess, the tympanic cavity and the Eustachian tube are
highlighted in picture g. The following sections refer to figure II.4.
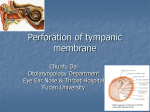
II.3.2.1
Tympanic membrane (TM)
The TM is the gate to the middle ear and is functionally allocated to it. It resides at the
medial end of the external ear canal and is tilted at an angle of about 55°. In the
tympanic sulcus, a groove in the bony canal, the TM is anchored by a ring of compact
connective tissue, the tympanic annulus. The TM is functionally divided into a small
superior portion, the pars flaccida, and the large pars tensa (Fig. II.4c). The small
pars flaccida resides superior to the lateral malleal process and its membrane is
relatively thick and flaccid, whereas the membrane of the pars tensa is very thin
(∼0.075 mm), tense and amounts about 90% of the TM. The tympanic annulus only
separates the pars tensa from the bony wall. The pars tensa is translucent, although
it is composed of four layers. The most lateral layer is continuous with the external
ear canal and the most medial layer is continuous with the mucous membrane that
lines the MEC. They enclose two fibrous layers, one with a radial and one with a
circular arrangement of fibers. Radial fibers extend from the tympanic annulus to the
center of the TM, the umbo, which marks the navel of the TM as well as the medially
residing tip of the manubrium, to which the TM is firmly attached by these fibers. The
shape of the TM gives the impression that the membrane is highly elastic and in the
center retracted medially by the umbo. As a matter of fact, the shape of the
membrane is defined by its own structure and properties, and roughly persists even
after removal of the malleus. The TM is 0.9-10 mm high and 0.8-0.9 mm wide and,
therewith, describes a slight oval that covers an area of about 64 mm2 (Wever and
Lawrence 1954). The almost vertical course of the manubrium, which connects the
TM to the ossicular chain and is laterally visible through the TM, divides the latter into
two uneven sized parts, a smaller anterior and a larger posterior quadrant.
II.3.2.2
Ossicular chain
The ossicular chain builds the mechanical connection between the TM and the inner
ear and is composed of three ossicles, the malleus, the incus and the stapes,
whereby the malleus is the lateral most, and the stapes the medial most ossicle. The
malleus is attached to the TM alongside the dimension of the manubrium, which is
also named the handle of the malleus. The manubrium extends from the lateral
Background
15
process of the malleus, which resides superiorly at the border between the pars
flaccida and the pars tensa, to the umbo. Although the TM is coupled to the
manubrium alongside its dimension, which seems functionally important (Graham et
al. 1978), the umbo builds the tightest connection between the ossicular chain and
the TM. Superiorly the manubrium is terminated by a prominent structure, the lateral
malleal process, which is visible from the medial side as an embossment at the
border between the pars tensa and the pars flaccida (Fig. II.4c,d).
Removing the TM allows an insight into the tympanic cavity (Fig. II.4d). The
manubrium and, therewith, the umbo and lateral malleal process now loom into the
tympanic cavity. The chorda tympani, an ascending branch of the facial nerve,
medially passes the manubrium. In the background, the bony wall of the cochlear
basal turn, the promontory, rises. The opening in the postero-inferior part of the
promontory shows the round window niche. Superior to the lateral malleal process. a
asterisk marks a structure, which will be removed in the next picture and has its
relevance later in this section.
Opening the superior part of the MEC uncovers the malleus and incus (Fig. II.4e).
Superiorly, the manubrium gives way to the neck of the malleus, which projects
slightly medially towards the malleus head. The head of the malleus forms the
anterior aspect of the IMJ, which connects it to the incus. Analogously the body of the
incus forms the posterior aspect of this joint. The incus projects posteriorly by a short
process and inferiorly by a long process. The chorda tympani crosses the long
process laterally and, therefore, partly masks it. At the tip of the long process of the
incus, a small appendix, the lenticular process of the incus (LPI), rises medially and
forms the lateral aspect of the incudo-stapedial joint. The medial aspect of the joint is
provided by the head of the stapes. The latter gives way medially to the anterior and
posterior crus, which form a sort of archway over the stapes footplate (Fig. II.4g). The
stapes footplate has the form of a slightly irregular oval and is circumferentially
connected to the cochlear wall by fibrous connective tissue known as the annular
ligament or stapedo-vestibular joint.
The connection of the stapes to the cochlear wall via the annular ligament and the
attachment of the manubrium to the TM, are the most peripheral suspensions of the
ossicular chain. In addition, the ossicular chain is suspended by a group of other
ligaments (Fig. II.4f). Besides the attachment to the TM, the malleus is suspended by
superior, lateral and anterior ligaments, and finally, by its connection to the incus, the
IMJ. The lateral ligament is marked by a asterisk in figure II.4d and spans fanlike
between the neck of the malleus and the lateral wall of the tympanic cavity. Together
with the opposed pars flaccida it encloses a small air filled chamber, Prussak's space.
From the neck of the malleus, a short process rises anteriorly and forms the
attachment of the anterior malleal ligament, which reaches into the petrotympanic
fissure. Helmoltz named this ligament the "axial ligament". The superior malleal
ligament is a very thin and week connection between the head of the malleus and the
wall of the epitympanic recess. Finally, the malleus is also connected to one of two
middle-ear muscles, namely the tensor tympani muscle. The tendon is joined to the
manubrium at its medio-superior aspect, close to the nck of the malleus, medially
spans the tympanic cavity and makes contact with the muscle, which is embedded in
Background
16
the medial wall of the tympanic cavity. In figure II.4g a asterisk marks the spot, where
the tendon gives way to the muscle. From here the muscle runs in an antero-inferior
direction, parallel to the Eustachian tube, and is covered by bony shell.
The incus, besides its medial connection to the stapes via the incudo-stapedial joint
and the connection to the malleus head via the IMJ, is suspended by the posterior
incudal ligament. It attaches the short process of the incus to the epitympanic recess
wall. The ligament is split into lateral and medial portions both rising from the
corresponding aspects of the short process.
The stapes is tightly embedded in the oval window and is laterally connected to the
incus by the incudo-stapedial joint. It is inserted by the second middle-ear muscle, the
stapedial muscle. Its tendon inserts on the posterior aspect of the neck and spans a
short distance until it reaches the opening of a bony shell that burrows the muscle to
which the tendon gives way. Figure II.4g further depicts the course of the facial
nerve. As the two middle-ear muscles, the nerve is also embedded in the medial bony
wall of the tympanic cavity.
The last picture in the sequence (Fig. II.4h) illustrates the two cavities that provide
space for the middle-ear structures mentioned above, the tympanic cavity and
epitympanic recess. The tympanic cavity is connected to the nasal cavity via the
Eustachian tube, which balances static air pressure differences between the MEC
and ambient air. More information about anatomy of the three middle-ear ossicles is
provided in figure II.5 which illustrates the three dimensional data obtained by microcomputer tomography. The ligaments and tendons are schematically added. The
insertion point of the two middle-ear muscles and their direction of pull are indicated
by the two arrows.
Fig. II.5: Anatomical description of the suspension of the ossicular chain and the
relative position of the three ossicles based on micro computer tomography. In the left
illustration the ligaments, and the attachment points and pull directions of both
middle-ear muscles are indicated. In the right illustration, the anatomical details of the
ossicular chain are labeled. The pictures of the three ossicles were derived from a
micro computer tomography scan (with permition from Mattia Ferrazzini).
Background
II.3.2.3
17
Inner ear
The inner ear is functionally divided into the
vestibular system and the hearing system. The
structure representing the hearing system is
the cochlea, a helical canal with 2½ turns (Fig.
II.6, Fig. II.7a). Two separated liquids of
different ionic composition fill the canal, the
perilymph and the endolymph. The perilymph
fills two compartments, the scala vestibuli and
the scala tympani. At the base of the cochlea
the stapes is in contact with the perilymph of
the scala vestibule, which communicates with
the scala tympani via a small connection at the
apex, the helicotrema. The scala tympani is
linked to the tympanic cavity via the round
window membrane. The endolymph is isolated
by the endolymphatic sac, which separates the
two perilymphatic scalae, except for the most
Fig. II.6: Gross anatomy of the
apical region, the helicotrema (Fig. II.7b). The
inner ear. The three-dimensional
endolymphatic space of the cochlea is called
data of the inner ear fluid space
the scala media. Towards the scala vestibuli it
were obtained by micro computer
is separated by Reissner's membrane and
tomography. The round (rw) and
oval window (ow) connect the
towards the scala tympani by the basilar
perilymph to the middle-ear. The
membrane and osseous spiral lamina.
picture of the inner ear was
The sensory organ, the organ of Corti, is
derived from a micro computer
located in the scala media (Fig. II.7c ). It
tomography scan (with permition
resides on the basilar membrane and the
from Mattia Ferrazzini).
osseous spiral lamina and contains a variety of
different cell types. Along the extension of the
cochlea, a row of inner hair cells and several rows (3-4) of outer hair cells are aligned.
In relation to the central axis of the helix, the inner hair cells are located centrally,
whereas the outer hair cells reside in the periphery. Hair cells constitute the sensory
cells (mechano-receptors) and transform the mechanical energy (fluid motion) into
electric energy (neuronal potentials), which is then transmitted and processed along
the neuronal network. Inner hair cells are predominately innervated by afferent and
outer hair cells by efferent neurons. Both hair cell types are also inter-linked by
neurons. The other cell types in the organ of Corti support these sensory cells
mechanically and physiologically, and affect the functionality of the hair cells in a
crucial way. The tectorial membrane, a fibrous membrane ridge of collagen, roofs the
organ of Corti. The apical ends of the outer hair cells are tightly bound to the tectorial
membrane. The outer hair cells are mechanically active and amplify basilar
membrane displacements in a nonlinear way. This mechanism is active at low sound
pressure levels and is responsible for the enormous dynamic range of the ear.
Background
18
The mechanical properties of the organ of Corti and basilar membrane vary from the
base to the apex of the cochlea. Parameters like mass, size and stiffness change
continuously from the base to the apex. The stiffness of the basilar membrane
decreases progressively towards the apex, whereas its mass increases. At the base,
the basilar membrane is thick while at the apex it becomes wide and thin (Slepecky
1996). The consequence of this continuous variation in parameters along the basilar
membrane is a tonotopic frequency mapping, hence, high frequencies being mapped
at the base and low frequencies at the apex of the cochlea.
Fig. II.7: Schematic illustration of the cochlea. (a) The cochlea performs 2.5 turns
from the base to the apex. At the base, two windows (rw: round window; ow: oval
window) connect the cochlea to the MEC. (b) Three scalae compose the cochlear
space (sv: scala vestibuli; sm: scala media; st: scala tympani). The helicotrema (he)
connects the scala vestibuli to the scala tympani at the apex. (c) The organ of Corti
(oc) resides in the scala media, which is separated from the scala vestibuli and scala
tympani by Reissner's membrane (rm) and the basilar membrane (bm) and the
osseous spiral lamina (osl), respectively. Two types of mechano-receptors are
embedded in the organ of Corti, the outer (ohc) and inner hair cells (ihc). The tectorial
membrane (te) overlaps the hair cells and touches the outer hair cell tips.
Background
II.4
19
Function of the ear
The function of the external and middle ears can be explained by means of acoustical
and mechanical principles. The pathway of a sound wave arriving at the head of a
human listener passes several anatomical structures, changes its energetic mode
and is processed by a complex neuronal network until it finally leaves a mark in the
perception of this listener.
The function of the external and the middle ears are outlined in this section, but due
to its remote relevance in this study, the description of inner ear function and
mechanics are omitted.
II.4.1
External ear
II.4.1.1
Head and pinna
The head itself constitutes the first obstacle
for sound waves approaching the two ears
of a listener. The abandoned ear receives a
more attenuated and delayed signal (Fig.
II.8). The attenuation is frequency
dependent, that is to say that high
frequencies (especially above 1.5 kHz) are
more affected by the acoustic shadow of the
head than lower frequencies. When a
sphere has a diameter that is greater than
roughly half of the sinusoidal tone
Fig. II.8: Inter-aural cues for
wavelength, it will cause significant
directional hearing. When a sound
attenuation. The shadowing of high
source location deviates from the
frequencies plays an important role for direction of view, inter-aural time
directional hearing. At low frequencies, the (ITD)
and
inter-aural
intensity
inter-aural time difference (ITD) is used as a differences (IID) occur. IID are more
directional cue. When the azimuth of the pronounced at high than at low
sound source differs from zero an ITD frequencies.
The
higher
the
occurs and causes a phase difference due frequency the more a sound is
to the path-length increment to the further attenuated by an obstacle.
ear. From about 650 Hz upwards
redundancies appear, and sound sources at different azimuths cause similar phase
differences between both ears. At higher frequencies, the shadowing effect starts to
play along and inter-aural intensity differences (IID) can be used as directional cues.
This is a simplified view of directional hearing, since it only considers the localization
of pure tones on a horizontal plane, but it points out that the head of the listener plays
an important role for the processing of inter-aural information.
The pinna, the most distal element of the hearing system, operates as a sound
collector; it collects sound energy like a funnel. The pressure passing the large
diameter of the funnel is condensed towards the small diameter of the funnel.
Background
20
Pressure acts as force per area and,
therefore, the tapering shape of the
funnel causes an increase in pressure.
The ear trumpet, the first form of
hearing aids, was based on this
principle. The sound transfer function
from the free field to the entrance of
the ear canal was studied by
Mehrgardt (1977). Figure II.9 shows
this transfer function, when sound is
Fig. II.9: Sound transfer function from the
presented from the direction of view (0° free field to the entrance of the ear canal
of azimuth). The transfer function is for a sound incidence from the direction of
highly frequency dependent. Between view (0° of azimuth). (Mehrgardt 1977)
1.5 and 4 kHz substantial sound
pressure gain appears, whereas losses occur at higher frequencies (6 - 10 kHz).
However, the pinna is not just a sound collector. It provides sound localization cues,
because its asymmetrical and irregular shape, ridges and depressions modify the
spectrum of a sound in a way that depends on the direction, from which a sound
approaches the head of a listener. Depending on the azimuth of a sound source the
transfer function as shown in figure II.9 changes. Sound waves impinging on the
pinna are reflected towards the entrance of the external ear canal. This principle
explains why the ear is generally more sensitive to sound stimuli from the frontal than
from the dorsal hemisphere, which is again an effect more pronounced at high
frequencies. Asymmetry of the pinna does not only provide directional cues in
azimuth but also in elevation. It allows a listener to discriminate between two identical
and familiar signals, which are played from two positions of the same azimuth but of
different elevation. In animals possessing a maneuverable pinna its relevance as a
sound localization device becomes even more obvious. The very limited mobility of
the human pinna does not seem to have functional meaning.
II.4.1.2
External ear canal
Efficient sound transmission from the environment to the middle ear, and the
protection of the delicate middle-ear structures are the two fundamental functions of
the external ear canal. Sound pressure waves arriving at the entrance of the ear are
acoustically coupled to the middle ear by the external ear canal. It extends from the
pinna to the TM, its diameter tapers and its center line meanders towards the TM.
The sound transmission characteristics of the canal are given by its shape, volume,
length, the acoustic properties of the wall and the middle-ear impedance (Hudde
1998 a, b, c, Wiener & Ross 1946, Stinson & Khanna 1989, Shaw 1974, Hellström
1993, Mehrgardt & Mellert 1976, Gerhardt et al. 1987).
Figure II.10 depicts the acoustic transformer characteristic of the external ear canal
measured and published by four different authors (Wiener 1946, Jahn 1960, Shaw
1974, Mehrgardt 1976). The individual differences in the peak of the sound transfer
Background
21
function from the free field to the TM vary as much as one full octave (Hellström
1993). Mehrgardt's data are only based on measurements in three subjects, and that
might be the reason why his results noticeably deviate from those of other authors.
However, depending on the individual characteristics of an external ear canal, the
peak in the sound transfer function is located in the frequency range between 3 and 5
kHz. This peak in acoustic transfer function can probably be ascribed to the length of
the canal (Caiazzo & Tonndorf 1977).
Fig. II.10: Acoustic
transfer function of
the
external
ear
canal given by four
authors: Jahn 1960,
Mehrgardt
1976,
Shaw 1974, Wiener
1946. The peak in
transmission gain is
between 3 - 5 kHz.
A phenomenon that occurs in confined spaces is the appearance of standing waves.
A standing wave pattern can be described as a vibration pattern created within a
medium, when the frequency of a source causes reflected waves from one end of the
medium to interfere with incident waves from the source to interfere in such a
manner, that specific points along the medium appear to be standing still (nods).
Such patterns are only created within the medium at specific frequencies. The
incident and reflected sound waves interfere either in a constructive or destructive
way. When toughs and crests of both incident and reflected waves overlap, the two
waves interfere constructively. When the crests of one wave overlap with the toughs
of the other wave, destructive interference occurs. Whether both waves interfere in
one, the other or in an intermediate way depends on the position in the tube. The
result is a non-traveling wave, a so-called standing wave, which has nods and antinods. Not all frequencies produce a standing wave within a certain medium.
Depending on the length of the tube only one specific frequency (and its harmonics)
will cause this phenomenon. In the case of the human external ear canal, a frequency
between 3 to 4 kHz will do so. The immediately arriving and reflected sound waves
produce an anti-node at the TM. The anti-node implies maximal constructive
interference between both sound waves. As a consequence, the sound pressure at
the TM is amplified. Therewith, the external ear canal favors the transmission of a
frequency that creates a standing wave and apart from the head and the pinna, the
external ear canal constitutes another acoustic filter.
Background
II.4.2
22
Middle ear
In the previous section the external ear canal was described as a terminated tube.
Acoustically this is not the case, since the TM was evolutionarily designed to absorb
acoustic energy from the external ear canal, transform it into mechanical vibration
and transmit it to the ossicular chain. The transition of acoustic energy into
mechanical vibration at the TM is defined by a variety of parameters such as the
volume of the MEC, the tension of the membrane, its mass and shape, and finally,
the load and stiffness of the ossicular chain. The acoustic properties of sea water and
air explicitly differ. The acoustic impedance (Z) reflects this and is defined as follows:
(1)
Z=ζ∗v
Where the Impedance (Z) is the product of both the density (ζ) of the medium and the
velocity (v) at which sound propagates in this medium.
Compared to sea water, the density of air is lower by a factor of about 850, and
sound propagates slower in air by a factor of about 4.6. Consequently, the ratio (r) of
the impedance between the two media (sea water / air) equals 3880. Table II.1
contains the exact values of the relevant parameters that define the acoustic property
of both media.
parameter
sea water
air
ratio
density
ζ
1024 kg/m3
1.21 g/m3
846.3
velocity (at 20°C)
v
1572 m/s
343 m/s
4.58
acoustic impedance
Z
161,000 ohm/ cm2
41.5 ohm/ cm2
3880
Tab. II.1: Parameters which define the acoustic properties of both media, sea water
and air: density, propagation velocity and acoustic impedance. The ratio in the right
column indicates the difference between both media by a ratio.
The amount of transmitted energy (T) from one medium to another depends on the
ratio (r) between the impedance of both adjacent media as defined in the following
equation:
(2)
T=
4∗r
(r + 1)2
If energy is to be transmitted from air to sea water, T equals 0.001, hence, 99.9% of
sound energy will be reflected back from the borderline between both media to the air
and only 0.1% will be transmitted to the sea water. The energy transmission loss
Background
23
expressed in decibels equals -30 dB. The impedance of the cochlea might not exactly
equal the value of sea water, but it can be expected to have similar magnitude.
The task of the middle ear is to overcome this impedance mismatch by acting as a
mechanical transformer, which amplifies the original signal in a way that energy can
be efficiently transmitted to the cochlear fluid. This amplification mechanism is
accomplished by the combination of three mechanical principles, (1) the hydraulic
lever ratio, (2) the lever ratio of the ossicular chain and (3) the curved membrane
lever ratio.
(1) The principle of the hydraulic lever ratio is based on the property of pressure
acting as force per area. The area of the TM is considerably larger than the area of
the stapes footplate. The resulting area ratio published by several authors varies
between 15 and 26 (Helmholtz 1868, Békésy 1960, Wever & Lawrence 1954,
Fumagalli 1949). When the force collected over the large area of the TM is
transmitted to the small area of the footplate this ratio operates and is manifested in
the transfer function. The indicated ratio only considers the anatomical relation of
both areas. Since the TM does not work as a whole, its effective area needs to be
defined in order to calculate the effective area ratio. The effective area is defined as
the "area that a piston would needs to displace the same volume when its whole face
moves with the amplitude of the center of the drum membrane" (Wever & Lawrence
1954). Quantifying this area turns out to be very difficult. Tonndorf and Khanna (1970)
observed the vibratory pattern of the TM by means
of time-averaged holography. They found the pattern
to be very complex and highly frequency dependent.
At low frequencies (up to 1.5 kHz) they indicate that
"all parts of the TM contribute in equal degree to the
total transformer action of the entire middle ear".
This is different at higher frequencies where
vibratory patterns are restricted in size and break up
into "quasi-independent sub-patterns". As a
consequence, the effective area and, therewith, the
effective transformer ratio, which is based on the
hydraulic principle, becomes frequency dependent.
Constant values indicated in the literature must be
considered with caution.
(2) The hypothesis of the ossicular lever ratio
comprises the lever action of the incudo-malleolar Fig. II.11: Lever ratio as
complex, and the coaction of two levers, one being conceived by Helmholtz. The
lenticular process of the
the manubrium of the malleus and the other the long
incus (LPI) and the umbo are
process of the incus. This implicates that the force
in line with one lever arm
exerted on the tip of the umbo is amplified by a that
originates
at
the
mechanical lever system. The increase in force posterior incudal ligament.
equals the decrease in displacement.
The lever ratio estimated by
The two ossicles are suspended in the three- Helmholtz was 1.5 : 1.
dimensional space of the MEC by several ligaments. Modified after Wever and
The tension at which these ligaments suspend the Lawrence, 1954.
Background
24
ossicular chain and their orientation in the three-dimensional space, define the
degrees of freedom of the vibrating ossicles. The anatomy of the middle ear will later
be described in detail. Measuring the mechanical properties and tension of the
various ligaments is technically very difficult and, therefore, most estimations for the
orientation of a common rotational axis were based on theoretical considerations.
Two different concepts of the ossicular lever ratio are presented next. Helmholtz
(1868) proposed the posterior incudal ligament to be the benchmark of ossicular
vibration (Fig. II.11). The force arm reaching from this ligament to the umbo provides
the first lever arm whereas the resistance arm extending from the lenticular process
of the incus back to the same ligament provides the second lever arm. Since both
lever arms reside on the same line, the concept reflects a single lever arm. The axis
of rotation is perpendicular to the orientation of the lever arm. The lever ratio of this
concept is 1.5 to 1. Dahmann (1930) presented a concept, which regarded the
anterior malleal ligament and the posterior incudal ligament as fixed points on the
rotation axis (Fig. II.12). Both lever arms are oriented perpendicularly to this axis, one
being the force arm, spanning the distance between the umbo and the rotation axis,
the other being the resistance arm, running from the LPI to the rotation axis. The
resulting lever ratio was 1.3 to 1. Dahmann defined this axis due to measurements
performed under dynamic stimulation of the middle
ear. He also measured the dynamic umbo
displacement and found it to be asymmetrical. This
asymmetry disappeared when he removed the stapes.
He concluded that the resistance exerted by the
stapes through its ligamentary attachment to the oval
window caused the resilience of the IMJ. So Dahmann
not only described a lever ratio that amplified the force
during the transmission of vibration along the
ossicular chain, but also observed a transmission loss
caused by the yielding of the IMJ. Stuhlman (1937)
built an oversized ossicular chain model and
measured the lever ratio under different conditions.
He suspected that the asymmetric motion of the umbo
observed by Dahmann was caused by a loose
coupling of the malleus and incus within the IMJ. Fig. II.12: Ossicular lever
described
by
Thus, he tested the model for conditions with an ratio
Dahmann.
He
suggested
immobile and a mobile IMJ and found two different
lever ratios. Considering the incudo-malleolar complex two lever arms both arising
as a rigid body, the lever ratio is 1.27 to 1, whereas in from the same rotational
axis. This axis passes
the case of loose coupling Stuhlman observed distinct
through
the
posterior
lever ratios for the inward (2 to 1) and outward motion incudal ligament and the
(1 to 1). A more recent study indicated that the lever anterior malleal process.
ratio is frequency dependent (Gyo et al. 1987). Based He found a lever ratio of
on studies that negate articulation in the IMJ during 1.3 : 1. Modified after
sound transmission (Gundersen & Høgmoen 1976, Wever
and
Lawrence,
Elpern 1965, Kirikae 1960), Gyo et al. explained their 1954.
Background
25
observations by the frequency dependent orientation of the rotational axis. In general,
definitions of rotational axes of the incudo-malleolar complex were either based on
anatomical observations or under dynamic stimulation at low frequencies. It is
reasonable to assume that the ossicular motion becomes more complex at higher
frequencies. Békésy (1960) and Kobrak (1959) described a change in the vibration
mode at higher frequencies. That a single axis of rotation is sufficient to describe
these complex motions is doubtful. In addition, if Dahmann and Stuhlman are right
with their observation and proposition of a flexible IMJ, the pattern of vibration would
become even more complex, and both anatomical considerations and measurements
at low frequencies would be inadequate in order to develop a concept, which holds
for the entire dynamic range of frequencies, and at which the human middle ear
operates. Therefore, statements about the orientation of rotational axes describing
the vibration pattern at all relevant frequencies have to be considered with caution.
(3) The curved membrane lever ratio was hypothesized by Helmholtz in 1868. The
importance of the TM as a sound transmitting structure was also discussed by
Politzer (1862, 1873). He lauded the properties of the TM admitting such a broadband
of frequencies compared to any other membrane. In an oversized model, he
demonstrated that the curvature of the membrane was responsible for this
phenomenon. A flat membrane responded maximally to only a specific frequency, but
much less to higher and lower
frequencies. This was different for a
convex membrane, which was
susceptible to a much broader band
of frequencies. Therefore, Politzer
proposed that the TM was the crucial
structure to guarantee broadband
hearing as it is implied for
understanding speech. The principle
of a catenary as described by
Helmholtz can be illustrated by a
rope suspended between two walls.
The force acting on the walls
exceeds the weight of the rope by
far, and if the attempt is made to pull
the rope taut, this force rises rapidly.
A small additional weight hanging in
the center of the curved rope will
exert an increased force on the wall
Fig. II.13: Curved membrane lever ratio. (a)
(Fig. II.13a). Due to the arrangement Illustration of the catenary. Small forces
of the radial and circular fibers of the applied to the sagging rope exert large
TM, the membrane curves from its forces on the wall the rope is attached to. (b)
rim towards the umbo. Each radial Applied to the middle-ear, the small forces
fiber of the TM plays the part of the are now regularly spread over the TM
rope in this example. The membrane surface. The forces exerted on the walls in
is on one side firmly attached and on 'a' are now exerted on the umbo.
Background
26
the other bound to a mobile structure, the umbo. In order for the TM to use this
principle, the radial fibers are supposed to be relatively inelastic and the circular fibers
relatively compliant. In this way the conical shape of the TM can be changed like the
curvature of the suspended rope. During the rarefaction phase of a sound wave in the
external ear canal, the center portion of the TM is displaced, the curvature, therewith,
slightly increased and the umbo is displaced with lesser amplitude but greater force
(Fig. II.13b). The size of the TM area is also important, since force equals pressure
times area: The larger the area, the larger the force that can be collected and
transmitted to the umbo. The same can be applied for the sagging rope. The longer
the rope, the greater the force exerted on the wall. Helmholtz' hypothesis was later
supported by Békésy (1941) and Wever & Laurence (1954) and reconfirmed by
Tonndorf & Khanna (1970, 1972 a, b).
This section illustrates that the middle-ear transformer ratio implicates a combination
of various mechanical principles. In general, the principle of the middle-ear
transformer ratio is to transmit a vibration efficiently to the inner ear by diminishing
displacement and intensifying force along the structures involved. Therewith, the
middle ear overcomes the great impedance differences at the borderline of air and
inner ear, and averts significant transmission losses. Theoretical calculation of the
total transformer ratio is very difficult, since all of these principles are frequency
dependent. Reliable results can only be gained from experimentally testing the
transformer ratio in the intact middle ear. But due to the compact and oblique
embedding of the middle ear within the temporal bone, direct access to the structures
of interest is difficult, and it is one of the attempts of this study to develop a technique
that allows relatively precise estimation of the middle-ear transformer ratio preserving
the entire inner ear and middle-ear structures.
Background
II.5
27
Review of IMJ-functionality
Some historical background was already provided in the last section. This section
reviews the history of research dealing with the anatomy and functionality of the IMJ.
Its history is a long and complicated, and this section shall provide a condensed
chronological review:
The first description of the human middle ear goes back to the end of the 18th century.
The anatomy of the IMJ gave reason to many discussions and quarreling.
First comments on the anatomy of the IMJ were made in the work of Soemmering in
1791. In this very early work the connection between the malleus and incus was
already described as a sort of joint showing two articular surfaces covered with a thin
layer of cartilage and held together by a membranous capsule. Luschka (1858)
confirmed Soemmering's findings, and due to his descriptions all requirements for a
true joint were given. Between Soemmering and Luschka's studies, Weber (1851)
considered the IMJ to constitute a true joint but negated functional mobility during the
transmission of sound.
Helmholtz (1868) was the first to investigate the anatomy of the IMJ in detail with
respect to its functionality. He proposed a common rotational axis for the motion of
the incudo-malleolar complex that involves the anterior malleal ligament and partly
the lateral ligament. He hypothesized that the shape of the IMJ surface crucially
affected the function of this joint. He interpreted the conformation of this joint as a cog
mechanism. The cohesion of both joint surfaces was provided by the articular
capsule, and Helmholtz proposed that this ligamentary union was relatively loose and
gave both ossicles additional degrees of freedom. The incus moved along with the
malleus, but the resilience of the IMJ permitted a moderate degree of independent
mobility. When the malleus moved outward (excursion), the joint allowed relative
gliding between both ossicles, the malleus disengaged, and the incus only partly
followed the malleus motion. This was different for the inward motion (incursion) of
the malleus: Now the cog surfaces engaged most firmly and the incus followed the
incursion of the malleus. Whereas the articular capsule defined the amount of
spreading between both ossicles during the excursion, the cog mechanism governed
the incursion.
When the stapes was removed and the incus, therefore, decoupled from the cochlear
load, the incus followed the inward and outward motions of the malleus likewise.
Since the rotational axis ran through the short process of the incus, almost no more
force antagonized that motion of the incus. Helmholtz concluded that the cog
mechanism was developed to force the incus to move inward despite of the cochlear
load and the flexibility of the articular capsule.
Helmholtz saw a protective mechanism in the IMJ. Due to the resilience of the
articular capsule during an excursion, a drastic decrease in pressure of the external
ear canal did neither harm the delicate incudo-stapedial nor the stapedio-vestibular
connection. It is important to have in mind that Helmholtz made no dynamic
experiments for the evaluation of his ossicular motion concept, but described the IMJ
macroscopically and draw his conclusions from rough mechanical testing. His
Background
28
conclusions, therefore, have to be associated with static mechanics rather than with
the dynamic behavior of the ossicular chain.
The discussion about the anatomy of the IMJ was still afoot, when Magnus (1869)
overruled the idea of a true articulation and proposed elastic tissue to build the
connection of both ossicles. Brunner (1870) insisted on the IMJ being a true joint.
Similar to Soemmering, he observed two smooth joint surfaces covered with hyaline
cartilage. He also mentioned the posterior connection of the incus and conceived it as
firm connective tissue containing tense fibrils. Rüdinger (1870), for the first time,
discovered a meniscus that separated the joint surfaces. He, therefore, proposed the
IMJ to constitute a true joint. He assumed that the meniscus was not found in
previous studies due to the preparation techniques applied. Rüdinger's findings were
confirmed by Körner (1878), who was his former student. Siebenmann (1898) denied
the existence of the meniscus as well as the existence of a symphysis and proposed
an intermediate structure. Motivated by Siebenmann, Schmidt (1903) published his
very detailed study on the anatomy and ontogenesis of the ossicular joints. He used
several staining techniques enabling better classifcation of tissue and made elaborate
serial sections in order to describe the entire dimension of the joint. He finally divided
the investigated joints of several mammalian species into two types, a "meniscoide"
and a "symphysoide" form. All observed forms were classified as intermediate. A
totally free meniscus was never observed. A cartilaginous disk between the malleal
and incudal cartilage was already present in a 1.6 cm long fetus, but neither at this
stage of development nor in the adult stage was this meniscus totally detached from
the cartilaginous surfaces of both ossicles. Doran (1976) emanated from a true joint
between malleus and incus and made a comparative study among several
mammalian species documenting in which species the IMJ was ankylosed. Helmholtz
had contact to Buck who lived in New York. Buck (1869) first made experiments
under dynamic stimulation at low frequencies (6, 110, 220 and 400 Hz). He observed
and quantified the dynamics of the entire ossicular chain and specifically of the IMJ
area. In all eleven temporal bones he examined, he found substantial differences in
the displacement amplitude of the malleus head and incus body close to the IMJ. He
reported a transmission ratio of 2:1 between malleus and incus. His results clearly
suggested that the IMJ was functionally mobile during sound transmission.
In experiments with variable static air pressurev in the external ear canal, Politzer
(1862, 1873) investigated the mechanics of the middle-ear ossicles. He demonstrated
that the IMJ strongly yields to an excursion of the malleus, which confirmed
Helmholtz's findings. Politzer further described the lever ratio of the ossicular chain.
He observed that, during an incursion of the malleus, the LPI followed this motion to a
smaller degree and that the stapes moved even less than the LPI. Due to the scale
difference between the TM and the stapes footplate, he suggested sound wave
condensation along the ossicular chain. The lever ratio was previously mentioned by
Buck (1869), and Politzer referred to his work. Buck found the lever ratio between
umbo, LPI and stapes to be 4:2:1. On the one hand, Politzer seemed to acknowledge
Helmholtz's idea of the cog mechanism, which implied that the incus completely
followed the incursion of the malleus. On the other hand, he assigned the articular
capsule of the IMJ the responsibility for the lever effect by yielding to the incursion of
Background
29
the malleus. During the incursion of the malleus the cog mechanism, as described by
Helmholtz, did not require the action of the articular capsule. In the case of a conjoint
motion of both ossicles, the orientation of the rotational axis could still explain the
lever ratio observed by Buck, but Politzer proposed the flexibility of the IMJ to cause
the lever effect.
Following Buck, Mach & Kessel (1874) presented another early description of the
ossicular motion based on their stroboscopic observations. In a second experiment
they mounted tiny mirrors on the ossicles and observed their motion based on the
angular deflection of the light beams during sound stimulation. Although the sound
pressure levels used in these experiments were not mentioned, the techniques
applied most likely demanded very high sound pressure level (120 dB or more) in
order to cause ossicular motion that is visually detectable. The experiments were
performed at 256 Hz and several higher harmonics (not indicated). The following
description of the ossicular motion is based on their observations under stroboscopic
light at 256 Hz: Mach and Kessel found the IMJ to be flexible not only under static
pressures but also under dynamic sound pressure alternations such as airborne
sound. As Helmholtz concluded from his macroscopic investigations into the shape of
the IMJ surfaces, the incursion and excursion of the ossicular chain constituted an
asymmetrical motion. At the same sound pressure level, the incursion of the malleus
was smaller than its excursion. During the excursion, the cog left the dent and the
synovial fluid penetrated the resulting gap, which caused the articular capsule to
bulge in, whereas during the incursion the cog entered the dent, displaced the fluid
and the capsule bulged out. So far their observations coincided with Helmholtz's
speculations. But they also noted that as soon as the cog mechanism engaged, the
articular edges at the medio-superior portion of the IMJ diverged, and parts of the
articular capsule were stretched, whereas others were relaxed. What Mach and
Kessel observed implicated the idea of Helmholtz's cog mechanism and Politzer's
assumption about the articular capsule playing an important role during both the
incursion and excursion of the malleus. Their work further emphasized the complexity
of the ossicular motion, pointing out that several degrees of freedom were necessary
in order to describe the vibration of the malleus in the three-dimensional space of the
MEC. Mach and Kessel used a very simple descriptive technique in order to
characterize the dynamic behavior of the ossicular chain, and their conclusions
presented the most detailed picture of the ossicular motion at that time.
Simulating the function of the middle ear by mathematical models became an
important aspect in the field of hearing research since the second half of the 20th
century. Much earlier, Frank (1923) developed the first mathematical model
implicating the acoustic resonator of the MEC (Helmholtz resonator) as well as the
ossicular chain and the cochlear load. He considered the masses of the middle-ear
ossicles and the elasticity coefficient of all ligaments involved. Comparing the
mammalian middle ear to that of birds, reptiles or amphibians, Frank emphasized the
deterioration of sound transmission through the middle ear by the insertion of the
incus. A new mass was added and the coupling between the TM and the inner ear
decreased. As a matter of fact, Frank assigned the IMJ elastic properties. Frank did
not preclude the existence of the cog mechanism, but mentioned that he never
Background
30
observed evidence for such a mechanism in his experiments. He highlighted the
simultaneous transition from the single-ossicle ear (columella) to the three-ossicle ear
and the appearance of a second middle-ear muscle (tensor tympani muscle) during
evolution. He saw a direct connection between both inventions, arguing that
independent effects of both muscles can only be reached by partly decoupling the
ossicular chain. Sound transmission losses appeared as an inevitable side effect.
The accurateness and impartiality, with which Dahmann accomplished his
experiments is remarkable. Therefore, some special attention shall be dedicated to
his work. The information presented here was condensed from two publications
(Dahmann 1929, 1930). As a starting point, Dahmann set 3 conditions to be fulfilled
by the experiments: (1) The specimens used had to be as fresh as possible. (2) The
stimuli used had to be physiologically relevant. (3) The measurement technique
should not affect the mechanical properties of the system and, therefore, be as noninvasive as possible. The temporal bones used in his studies had a maximal post
mortem time of 24 hours. Based on Frank's (1923) findings, Dahmann emanated that
the mechanical conditions in those temporal bones matched those in the living human
being. But he accentuated the risk of dehydration during the experiment. Dahmann
decided to use an optical technique
established by former researchers
(Mach & Kessel), which implicated
the fixation of tiny mirrors on the
ossicles.
During
stimulation
(dynamic or static pressures), the
middle ear was illuminated and the
motions of the light beams deflected
by the mirrors were mapped. The
mirrors had a weight of about 0.1mg,
and Dahmann assumed that this
weight was negligible and, therefore,
an irrelevant load for the system.
The advantage of this technique is
that it can be used in experiments
with dynamic and static stimulation,
since the light deflections reveal
absolute values for the ossicle
position. Concerning the mechanical
properties of the IMJ, Dahmann
seemed to be impartial and in first
Fig. II.14: Malleus, incus and stapes
place offered three different possible
displacements induced by static pressure
functionalities of this joint. (1) The
differences. The data indicates asymmetric
IMJ was rigidly locked. (2) Malleus
displacements
during
incursion
and
and incus were freely moving. (3)
excursion in all three ossicles and a loss of
Malleus and incus were coupled by
displacement along the ossicular chain.
Schematic representation of Dahmann's
the articular capsule.
In his
results at static pressures (1929).
publication in 1930, Dahmann
Background
31
focused on the static and dynamic behavior of the incudo-malleolar complex.
Dahmann suggested that the force caused by a static pressure in the external ear
canal was reduced along the ossicular chain and, by stepwise decomposing the
ossicular chain from the medial side, he quantified these losses. In the intact system
(intact inner ear and intact ossicular chain), the excursion caused by a negative
pressure was larger than the incursion at a corresponding positive pressure. The ratio
between the incursion and excursion was about 3:5. Dahmann observed this ratio to
be constant for all ossicles along the ossicular chain (malleus, incus and stapes). In
the same experiment the displacements of the umbo, LPI and stapes were recorded,
and Dahmann found that they were diminished along the chain. These
measurements are schematically depicted in figure II.14. Since Dahmann did not
numerically note the measured displacements obtained by the experiment, the
indicated values were read from the chart. By separating the ossicular chain from the
cochlear window both effects, the inward-outward ratio and the loss of displacement
along the chain, disappeared. Now the incus completely followed the motion of the
malleus. From that Dahmann concluded that the loss of displacement along the
ossicular chain was not an effect of the lever ratio, which would be maintained after
separation of the ossicles from the oval window, but that dissipation occurred in the
articulations between the ossicles. Motions of the stapes were drastically limited by
the annular ligament and, therefore, the relatively large displacements of the umbo
could not be followed by the stapes. The resistance of the annular ligament caused
the articular ligaments of the IMJ to yield to the forces exerted by the malleus. The
same results were found in the dynamic experiment, when the system was
acoustically excited. The incursion was smaller than the excursion, the displacements
along the ossicular chain were reduced, and decoupling from the oval window
eliminated both phenomena.
According to Dahmann, the lever ratio of the ossicular chain was not evolved in order
to amplify pressure along the ossicular chain from the TM to the stapes footplate, but
rather to dynamically balance the dissipations along the chain, which occurred mostly
in the IMJ. He investigated the effect of experimentally applying strain to the tendons
of the middle-ear muscles and interpreted their operation as a protecting mechanism.
The joints played an important role when the muscles exerted strain on the ossicular
chain. He saw a purely protective mechanism in the middle-ear joints and muscles.
The dissipation of energy during sound transmission was considered to be a sideeffect of this protective mechanism and the lever ratio partly balanced them.
Stuhlman (1937) hypothesized that the "transmission mechanism of the ossicular
chain possesses not only a nonlinear operating characteristic, but is also
asymmetrical, so that the inward motion of the malleus handle with its accompanying
chain of events must possess a different mechanical efficiency than its corresponding
outward motion." Stuhlman was looking for possible mechanisms and causes for the
asymmetric motion in the middle ear. Therefore, he built a large scale replica of the
ossicular chain, which gave him the opportunity to define the coupling of the IMJ from
locked to very loose. Stuhlman found that both displacement and force were
transmitted in an asymmetrical and nonlinear way from the malleus to the stapes,
when the IMJ was not locked. In the locked situation, the lever ratio was found to be
Background
32
1.27 : 1. However, in the loose IMJ situation, the lever ratio became asymmetrical
being 2 : 1 for the inward and 1 : 1 for the outward motion. In the case of a loose joint,
the IMJ only dislocated during the inward motion, and Stuhlman saw a protective
mechanism for the inner ear in this mechanical behavior of the joint.
Kobrak (1959) observed the ossicular motion under static air pressure using the
same technique as Mach & Kessel and Dahmann. He placed small mirrors on the
ossicles and mapped their deflection patterns. His experiments confirmed the
observations of several former studies (Politzer 1862, Helmholtz 1886, Dahmann
1930, Stuhlman 1937), concluding that the incursion of the umbo was smaller than
the excursion when exposed to the same positive or negative pressure. Kobrak
stimulated the ossicular chain also acoustically and observed the same asymmetry
even at sound pressure levels of 70 dB (concerning the used measurement
technique, the author doubts that measurements at this sound pressure level induced
detectible displacements). In a motion picture study, he further observed that the
incus lagged behind the malleus during the incursion as well as during the excursion,
and the amplitude of the LPI was smaller than that of the umbo. Kobrak described the
IMJ as a flexible connection between malleus and incus yielding to static as well as
dynamic forces and, therewith, entailed the loss of energy during sound transmission
through the middle ear. Kobrak also investigated the function of the middle-ear
muscles and clearly assigned them a protective function for the inner ear. He found
the contraction of the muscles to be highly dependent on the quality of the acoustic
stimulus. Besides frequency, the intensity of the acoustic stimulus directly affected
the intensity of muscle contraction.
On year later, Kirikae (1960) published his detailed middle-ear study. He described
the middle-ear ossicles with admirable care and, for example, evaluated the center of
mass of the malleus and incus. Among various other experiments, he used an
electrical method in order to study the dynamics of the ossicular chain. Kirikae found
no phase lag between the malleus and incus and, therefore, concluded that the IMJ
was functionally immobile during sound transmission.
Concerning the function of the human hearing system, Békésy is probably the most
often cited author and also made an important contribution to the understanding of
the middle-ear function. The multitude of his studies is collected in a book (Békésy
1960). His various investigations concerned almost all aspects of the peripheral
human hearing system and only a tiny cantle of his work is reviewed here:
Békésy pointed out that the complex motion of the ossicular chain did not only rotate
about a fixed rotational axis, but about a point formed by the posterior ligament of the
incus. Therewith, the ossicular chain obtained several degrees of freedom.
Experimentally cutting the posterior incudal ligament only affected the transmission at
lower frequencies, but not at higher ones. Békésy, therefore, concluded that at higher
frequencies the rotational axis passed through the center of mass of the incudomalleolar complex. Since the higher frequencies were mass controlled, the loss of the
axial ligament had no effect on the ossicular motion. The various degrees of freedom
enabled several modes of vibration to appear at different sound pressure levels,
which was a rather new idea. Békésy explained this phenomenon as follows: The
stiffness of the annular ligament of the stapes varies along the outline of the stapes
Background
33
footplate and saturation of elongation is reached at different amplitudes of stapes
footplate displacement depending on the mode of motion. Reaching saturation at a
certain sound pressure level leads to the transition from one to another motion mode
that entails a reduced volume displacement at the oval window. This, Békésy
believed, was a protective mechanism for the inner ear at high sound pressure levels.
An important finding by Békésy states that the middle-ear pressure transformer was
frequency independent up to 2400 Hz. Although at higher frequencies the transformer
ratio dropped, Békésy did not dwell on it.
Békésy clearly assigned the middle-ear joints a protective function for the inner ear.
He had the notion that the ligaments that hold together the middle-ear joints provided
enough cohesion, so they did not yield to the small forces caused by sound impinging
on the TM at moderate sound pressure levels. However, at high sound pressure
levels the cohesion of the articular capsule was too week to prevent the joint surfaces
from clattering. Therefore, at high sound pressure levels the middle-ear muscles
came into play and compressed the joint surfaces (incudo-stapedial joint) or stretched
the articular capsule (IMJ) in order to suppress possible distortion in the joints.
Békésy probably assigned the middle-ear muscles the described function, because
he doubted the efficiency of their protective function, especially that of the tensor
tympani. But much earlier, Kato (1913) demonstrated that rabbits with disrupted
middle-ear muscles became deaf sooner when exposed to loud sounds, than rabbits
with the middle-ear muscles functioning. Békésy's final conclusions about the mobility
of the IMJ are surprising: "However, a movement in the joint between the malleus and
incus could usually not be observed (Helmholtz 1868); this joint is apparently
ankylosed." This means that according to Békésy the malleus and incus vibrate as
one rigid body during acoustic stimulation.
Davis (1948) and later Harty (1953, 1964) studied the middle-ear joints and were
mainly interested in the composition of middle-ear joints. They found the capsule of
both middle-ear joints to be mainly composed of elastic tissue. They considered both
joints to be synovial joints, true joints. Harty concluded that the IMJ allowed sliding
and rotation at the joint surfaces. He considered the elasticity of the joint capsule to
provide "mechanical protection to the delicate bones, membranes and joints", but it
also "provides enough articular cohesion to allow the ossicular chain to function as a
physiological unit."
Elpern (1965) experimentally fixed the IMJ and found no significant changes in the
transmission of sound to the round window. His findings suggested that the IMJ was
already functionally immobile before fixation. A study directly focusing on the issue of
the IMJ mobility was performed by Gundersen & Høgmoen in 1976. They used time
averaged holography to characterize the motion of the ossicular chain in the area of
the IMJ at various frequencies. The light interference patterns revealed a common
rotational axis between the malleus and incus and no transmission losses. Below 800
Hz, as far as they presented the results, this pattern was consistent, which implied
that the IMJ was functionally rigid.
Much later, Decraemer (2001) came up with an elaborate technique involving multiple
measurements by means of laser Doppler vibrometry and three-dimensional
anatomical data of the measured ossicles. He used this data to simulate the ossicular
Background
34
motion of two middle ears (one donor) at different frequencies. The animation of his
measurements clearly showed substantial slippage between the malleus and incus
even at low frequencies. The study further revealed complex motion modes of both
ossicles at higher frequencies, which were free of defined, stable or common rotation
axes.
This short review makes clearly demonstrates the debate regarding the functionality
of the IMJ, which is still afoot. Many contradictions exist about the dynamics of this
joint, and some conflicting conclusions are even based on previous experiments. An
estimation of the scientific value of the latter will be attempted in chapter VI.
35
Chapter III
III
Materials & methods
III.1
Setup
The problem addressed in this study requires the ability to produce an acoustic signal
in order to excite the middle-ear system, to detect the motion of the ossicular chain in
the area of the IMJ, and for reference purposes, to record the sound pressure level at
the tympanic membrane (TM). In the following sections, the devices used and the
techniques applied are described.
III.1.1
Laser Doppler Vibrometry (LDV)
A variety of optical techniques can be used to measure the vibration displacement of
a surface or structure, thereby avoiding the loading effects of attached transducers.
Scanning Laser Doppler Vibrometry offers a particularly versatile solution to many
scientific vibration measurement problems. Deflections of mechanical structures can
be measured easily and quickly, with little or no test surface preparation, using a safe
and low powered laser (~1 mW). A Laser Vibrometer can accommodate a wide
dynamic range of vibration amplitude and frequency. Since the output is directly
proportional to the instantaneous surface velocity, the technique offers a natural
alternative to contact sensors for mobility measurements. Non-contact
measurements are generally considered to be intrinsically more meaningful than
contact methods, largely due to the fact that the dynamics of a body can be
significantly changed by an attached transducer.
Materials & methods
36
III.1.1.1 The principle of LDV
The basic principle behind Laser Doppler Vibrometry (LDV) is the Doppler-effect. A
coherent laser beam is projected onto the object of interest. Light scattered back
from the surface is shifted in frequency by the relative velocity of the surface. The
wavelength is elongated when the surface moves away from the laser head and
shortened when it moves towards the laser head. The instrument is based on an
interferometer, in which a laser beam is first divided into a reference and a signal
beam. The signal beam is directed onto a vibrating test structure, and the reflected
light is then recombined with the internal reference beam. When the target structure
moves, the wave length between the reference and signal beam differs, resulting in
intensity modulation of the recombined beam due to interference between them. The
recombined beam is split between two independent detection channels configured,
so that the two signals obtained are phase shifted by ±90 degrees, to allow
determination of the direction of the motion of the surface. Electronic mixing of these
signals with a carrier frequency is used to derive a single, frequency shifted Doppler
signal which is then converted to an analog voltage directly proportional to the
instantaneous velocity of the moving surface. Such a measurement system can only
provide relative position information and no absolute values. The relative position
(change of position, or displacement) can be calculated from the changes in velocity.
III.1.1.2 Laser Scanning Doppler Vibrometry LSDV
To investigate the dynamic behavior of the middle-ear ossicles, a Laser Scanning
Doppler Vibrometer system PSV-200-1 (Polytec GmbH, Waldbronn, Germany) was
used. The system is composed of a sensor head (OFV 303), a vibrometer controller
(OFV 3001-S), a scanning unit (OFV 040), a scanning controller (OFV 042) and a
personal computer (PC). Coaxial to the laser beam, a video camera (VCT 24)
captures an image of the scanning area. The measurement system is illustrated and
the components labeled in figure III.1. The Vibrometer Controller (OFV 3001-S)
allows the laser head to be computer driven. Since processing of the signal coming
from the laser head leads to a delay, the Vibrometer Controller synchronizes the
velocity signal and the signal from another device, which is usually a microphone. In
order to receive a strong signal from the reflected laser beam, the latter is focused
down to a diameter of 10 microns. The minimal size of this diameter limits the spatial
resolution of the system (two laser beams reaching the object surface in a center-to
center distance of 10 microns can theoretically be discriminated). For the present
study this high performance in spatial resolution was more than adequate.
The Scanning Unit (OFV 040) constitutes a box which is mounted in front of the laser
head. It incorporates fast scan mirrors for moving the laser beam within an angular
range of ±15° in the x and y directions. The drivers of the mirrors are highly
dampened in order to prevent vibrations in the mirrors during a measurement. In this
way, the delay between one and the consecutive measurement (on an adjacent
point) can be reduced to 10 ms. Control voltages and power for the mirrors are
provided by the Scanning Controller (OFV-042).
Materials & methods
37
Fig. III.1: Laser Doppler Scanning Vibrometer (LDSV) system PSV-200-1 (Polytec
GmbH, Waldbronn, Germany). The laser head is mounted on a massive but easily
maneuverable rack that enables precise positioning and holding steady the laser
head. The laser Doppler measurement, the control of the signal generation and the
measurement of the reference signal (SPL in these experiments) is PC controlled (6).
The system is further equipped with a video camera. A half-silvered mirror, inserted
at a 45° angle to the laser beam, is primarily diaphanous for the wave length of the
emitted laser beam (633nm), however mostly reflective for the rest of the visual light
spectrum. Besides the scanning area image, a small portion of the reflected laser
beam is deflected by the mirror and therefore visible on the video image. This allows
coaxial alignment of both, the laser beam and video image, which facilitates
measurements on structures that can only be reached through a small opening (e.g.
through a small perforation in the TM).
III.1.2
Software and steering
The measurement system (PSV-200-1) is controlled by a software package (PSV
6.14, Polytec) that can generally operate in two modes, an acquisition and a
presentation mode. The software allows the control of the laser position, the input
signal (acoustic stimulus) and the measurement procedure. How this is performed in
more detail is described in the following sections.
Materials & methods
38
III.1.2.1 Acquisition mode
In this mode the software controls the signal generator and the two input channels
during a measurement. Measurements are made in real time at manually selected
points (single point measurements). A scan involves performing a set of such
measurements. The system automatically scans along a predefined grid, an area
enclosing regularly spaced points. At the end of a scan, the data is automatically
stored to file.
Signal control: The acoustic signal produced by the signal generator is also
controlled by the software package. The signal type (periodic chirp, sweep, noise,
user defined etc…), the frequency resolution (number of FFT-lines) and the
frequency range can be selected. The signal type “user defined” plays back a signal
created by the user in order to customize the stimulus to any experimental
procedure. For this study a multi sine stimulus (see III.3) was created which was
used in all experiments. At the beginning of a measurement the PC creates the time
signal of the selected signal type and then sends it to the signal generator.
Laser position control: In the acquisition mode, either the laser beam was
positioned “manually” (through the software) and monitored by the video image, or
the system automatically followed the measurement grid during a scan as mentioned
above. Since the mirrors of the scanning unit (OFV 040) positioned the laser beam
by angular deflection, the system was susceptible to changes in distance between
the measurement surface and the laser head. When this distance changed, both the
angular deflection of the beam and the x-,y-position did not merge anymore. Hence,
the system needed to be calibrated before each measurement.
a
b
Fig. III.2: Calibration procedure illustrated by
a surgical blade. (a) The laser beam was
first brought to a certain position between
the surgical blade and the border of the
image window. The cursor then marked this
position (circular target marker) before the
laser beam was brought to a new position.
(b) Once calibrated the laser beam precisely
follows the cursor or the measurement grid
(point by point) during a scan.
The procedure of calibration is illustrated in figure III.2, where a surgical blade is
used to illustrate a possible object to be measured. The laser point was first brought
to an arbitrary position between the blade and the border of the video display. Then a
mouse click sets a mark on the position of the laser point and therewith assigned x-,
y-coordinates to this position. The calibration requires at least three points to be
Materials & methods
39
selected (Fig. III.2a). The further away the selected points were from each other, and
the more points chosen in this procedure, the more accurate was the calibration.
During a scan, the scanning unit guided the laser along a grid, changing the x and y
coordinates stepwise (Fig. III.2b).
At each intersection of the grid, the position of the laser was maintained for the time
the laser needed to measure the velocity at this point (the measurement time
depends on the number of averages and the signal type). The spatial resolution of
the grid and the object area covered by the grid could be determined. The points of
the grid were numbered consecutively and the system allocated relative x and y
coordinates to each point.
Measurement: The measurement data of a single point can be viewed in the time or
the frequency domain. The incoming data is processed using Fast Fourier Transform
(FFT) before it is stored as a complex number describing the motion performed at
each point and frequency. In order to avoid transformation errors like Leakage and
Aliasing, the length of the FFT-time window and the sampling rate must be adapted
for the chosen signal type. The sampling rate is selected by the system, based on the
highest selected frequency of the signal; the minimal sampling rate should be at least
double the highest frequency selected. Leakage is avoided, when the signal at the
beginning of the time window is similar to the signal at the end of the time window.
This was achieved by selecting a time window size, which equaled a multiple of all
wavelengths used (10ms). Therefore, the sinusoidal waves of all frequencies used
between 0.5 and 10 kHz started with zero at the beginning of the time window, then
performed an integer number of cycles and finally reached zero again at the end of
the time window. A rectangular window was used, since the conditions for avoiding
Leakage have already been met by the selection of the signal and the size of the
time-window. The selected measurement parameters were applied to both input
channels: the velocity information from the laser head (channel B) and the reference
signal from the microphone (channel A).
Data storage: During a scan, the system stored the real and imaginary component
of the mean velocity for each frequency selected and for each point on the grid.
Additional information such as the sound pressure level (SPL), the output of the
signal generator or the coherence between channel A and B could also be acquired.
III.1.2.2 Presentation mode
In the presentation mode, the velocity information of all points on the grid (one scan)
could be visualized. The data could be displayed as colored coded iso-displacementlines (Fig. III.3b) or as a topographic “map”, given as velocity, displacement or
acceleration and on a linear or logarithmic (dB) scale. The quality of the performed
measurement could be viewed for each point indicated by the intensity of the
reflected signal and the coherence between the stimulation signal and the measured
velocity (Fig. III.3a). The system also allowed the dynamic behavior of the measured
object to be animated using a series of moving pictures. This powerful feature
enables immediate visualization of complex dynamic motions (Fig. III.3c).
Materials & methods
a
40
b
c
Fig. III.3: Three examples of how the measured data could be viewed in the
presentation mode of the software (PSV 6.14, Polytec). (a) Coherence between the
stimulation signal and the measured velocity (0< value >1); the brighter the point the
higher the coherence. (b) The line pattern in the joint area represents the originally
color coded iso-displacement lines. (c) From animation of the data as moving
pictures.
III.1.3
Positioning system
An important part of the setup was the positioning system. Measuring surface
velocities of small objects like the human middle-ear ossicles of the demanded
precise positioning of the temporal bone. In order to obtain the optimal view into the
middle ear, the system should offer translational and rotational alignment of the
temporal bone. Another requirement for the positioning system was the ability to
reposition a specimen. In some experiments the temporal bone had to be removed
from the holder or consecutive measurements were performed from different
directions. In these cases the original position needed to be registered and noted.
Precise repositioning allowed the comparison of registered data even though the
temporal bone was removed and then repositioned between two measurements.
Two components of the setup were used for the alignment, the positioner of the
temporal bone (the goniometer) and the suspension of the laser head. A positioning
system was developed that included both. Three rotational and two translational
degrees of freedom were provided by the goniometer, and one translational degree
of freedom by the laser head suspension. Figure III.4 depicts both parts of the
positioning system, the goniometer as well as the laser head suspension. The
positional angle of the three rotational axes of the goniometer could be registered
from protractors that had an angular resolution of 0.5 degrees. Due to the different
sizes of the temporal bones and the more or less arbitrary attachment of the mount to
the temporal bone, the object of interest was not positioned in the center of the
goniometer. Therefore, changing the orientation of the temporal bone between
measurements (e.g. between a TM and a IMJ measurement) brought the object of
interest out of the display window. This was corrected by the three translational axes
of the goniometer and the laser head suspension. Absolute positional values for the
translational axes were not registered, because possible deviations caused by
imprecise repositioning along these axes led to negligible small angular errors and,
however, only these angular deviations were relevant.
Materials & methods
41
Fig. III.4: Degrees of freedom of the positioning system. The goniometer (left)
provided three rotational and two translational (back and forth; left to right) degrees of
freedom and the suspension of the laser head (right) provided one additional
translational degree of freedom (elevation).
a
b
c
d
Fig. III.5: Repositioning procedure of the IMJ-region (a). After angular repositioning
via the goniometer the temporal bone was laterally shifted in order to merge with the
outline of the IMJ (b) and the previously used scanning grid (c,d).
The measurement grid from a previous scan helped to readjust the two translational
axes in the display plane, since the grid form marked the outline of the object (fig.
III.5). Finally, maximal translational deviations of 1mm caused angular errors of about
0.25°, which is less than the resolution of the protractor and negligible regarding the
deviations in displacement measurements. Since the focal plane of the video camera
Materials & methods
42
was maintained throughout the duration of the experiment, repositioning of the third
translational axis (parallel to the laser beam) was achieved by refocusing the object
of interest. This is possible because the focal length used and the aperture of the
video system resulted in a depth of field of less than 1mm.
The positioning system met the requirements for this study by offering precise
positioning of the temporal bone, which could be meter-read and precisely
repositioned.
III.2
Temporal bones
Most questions arising in human middle-ear mechanics must be addressed by using
temporal bones which have been removed from human cadavers. The objections,
that insights gained from measurements on cadaver ears cannot be applied to the
ears of living subjects is only justified in part. The contribution of the two middle-ear
muscles (m. tensor tympani & m. stapedius) on middle-ear mechanics in vivo are
certainly factored out in temporal bone measurements. But there is evidence that the
passive mechanics on which this study focuses on are still intact post mortem. It has
been shown “that the middle ears of extracted human temporal bones can be useful
models for studies of middle-ear function...” (Rosowski, 1990). Frank (1923)
evaluated the variables needed for his early mathematical model and observed no
difference in the Young's modulus of the tympanic membrane in live and dead
humans. Békésy (1960) noted that the pressure transformation of the middle ear is at
its maximum in fresh temporal bones and decreases with the time elapsed post
mortem. Using temporal bones in this study was even an advantage, since the
previously mentioned active mechanisms in vivo did not interfere with the passive
mechanics of the middle ear. Certainly, the surgical approach needed for these
experiments left no alternative but to use temporal bones extracted from cadavers.
The temporal bones were prepared immediately after removal from the cadaver and
the experiments were performed within 36 hours (min.:10h; max.:36h) post-mortem.
31 fresh human temporal bones (11 females, 18 males) were used in this study.
Not all 31 temporal bones could be used for all experiments. Two bones were used in
control experiments whose procedures did not permit the temporal bones being used
for other experiments, another two were excluded from the analysis due to
anatomical peculiarities (tympanosclerosis and malformation of the TM) leaving 27
for the final analysis. In a first set of experiments the area of the IMJ was scanned in
order to describe the transmission characteristics of the joint. In a second set the
experimental procedure was refined and modified in order to allow motion
reconstruction of structures which were not accessible during the measurement and
then, in addition, the IMJ was experimentally fixed. For the problem addressed in the
first set of experiments, results were also gained from the second set ending up with
a complete set of temporal bones analyzed (n=27), whereas the fixation and
reconstruction procedure could only be applied to the temporal bones of the second
set of experiments (n=15). In the last part of the analysis the data were tested for
possible correlations with parameters such as the age of the specimens and gender.
Materials & methods
III.2.1
43
Temporal bone preparation
After connective tissue and muscle were removed from the temporal bone, the
cartilaginous and bony wall of the external ear canal were removed or drilled down
leaving a narrow bony rim (~1mm) around the tympanic annulus. The external canal
was widened and close to the level of the tympanic annulus a small platform around
the TM was created by trimming the bony canal down. The artificial external ear
canal (AEEC) was later placed onto this platform. A small groove was drilled into the
platform for the microphone tube, so that it could be positioned as close as possible
to the TM and was not squeezed between the AEEC and the platform. The tube was
embedded into this groove using a general purpose acrylic resin (TRAD, Unifast,
Leuven, Belgium). The platform was covered with a layer of resin in order to
guarantee a good seal between the bone and the AEEC. After the resin had dried (~5
min.) the proximal part of the AEEC was placed on the platform and mounted with
more resin. The right consistency of the resin was crucial: the AEEC should be tightly
embedded, but the resin should not penetrate the small spaces between the first
layer of resin and the AECC and covering parts of the TM. After the second lot of
resin had dried (~10 min.) the TM was moistened and the distal part of the AEEC
coupled to the mounted proximal part.
Fig. III.6: Schematic illustration of the
temporal bone after preparation.
Sound pressure was measured using
a tube microphone (ER-7C) close to
the TM. The two piece artificial
external ear canal (AEEC) was
terminated distally with a glass cover
slip (GCS). The loudspeaker (CI2960) was mounted on the distal
portion of the AEEC. The external ear
canal was attached to the temporal
bone with acrylic resin (AR). Laser
Doppler measurements were possible
from two directions: laterally through
the AEEC on the TM (A) and medially
through the medial cranial fossa on
the area of the IMJ (B). Modified after
Sobotta.
Since a glass cover slip terminated the distal part and a rubber seal between the two
parts allowed tight coupling between them, the air space within the AEEC maintained
its humidity. Through the loudspeaker tube, passive pressure balance between the
chamber and the ambient air was still possible. A schematic overview of the prepared
temporal bone is given by figure III.6. A small hole (~1 mm in diameter) through the
Materials & methods
44
medial cranial fossa into the MEC enabled the pressure balance between the MEC
and the ambient air. A hole was drilled into the anterior part of the temporal bone in
order to fix the mount which would then be attached to the goniometer. The lock bolt
of the mount had a guiding notch which facilitated precise repositioning of the
temporal bone after manipulations that required the removal of the temporal bone
from the goniometer. The mount was tightly attached to the temporal bone with a
screw preventing relative motion between them (Fig. III.7). For the duration of the
experiment the mount was never removed from the temporal bone.
Fig. III.7: Chrome steel mount which allowed fixation of the temporal bone to the
goniometer (left). Spikes on the fastening plate guaranteed a tight and steady
attachment between the mount and the temporal bone. A guiding notch facilitated
precise repositioning of the temporal bone after removal from the goniometer.
Temporal bone modified after Sobotta
The temporal bone was then ready for a base-line measurement (umbo displacement
with closed MEC). The small opening into the MEC, which allowed the pressure to be
equalized was sealed with binding tissue. The temporal bone was mounted on the
goniometer and aligned in order to bring the TM into an orthogonal position to the
laser beam. The functionality of the microphone (ER-7C) and the permeability of the
microphone tube were checked. A loudspeaker integrated into the ER-7C allows the
calibration of the microphone (94 dB at 1 kHz). The loudspeaker (CI-2960) was
attached to the distal part of the AEEC via a short (ca. 3mm in length) plastic tube.
The description of the base-line measurement can be gleaned in section III.4.2.1.
After the base line measurement the temporal bone was removed from the
goniometer (the mount remained fixed to the temporal bone). The opening of the
MEC was now established through the medial cranial fossa.
The challenge was to provide maximal visual access to the area of the IMJ without
damaging any middle-ear structures (ligaments, tendons, muscles and nerves) and
Materials & methods
45
by preserving the entire inner ear. The superior semicircular canal was the prominent
structure that complicated this aim. Once the anatomy of this area was familiar to the
experimenter this goal could be easily attained. Now the temporal bone was
repositioned in the goniometer and a second measurement was performed (umbo
displacement with open MEC). After that the temporal bone was aligned for
measurements on the IMJ. Whenever the temporal bone was repositioned a
reference still image was taken with the video camera.
III.3
Acoustic stimulation
III.3.1
Choice of signal type
The choice of the acoustic signal needs to take into account the problem addressed
in the experiment. An important factor is the required frequency resolution. Since the
human middle ear is a highly dampened system (Békésy 1960, Gill, 1951, Møller
1972) the deflection shapes are smooth and a relatively low frequency resolution (41
frequencies between 0.5-10 kHz) is sufficient for describing the frequency response.
However, a high frequency resolution is preferred, if other factors such as the
duration of the experiment and the maximal power output of the loudspeaker do not
form a constraint. In the case of a periodic chirp, the frequency resolution directly
influences the measurement duration; the higher the frequency resolution, the longer
the measurement duration and vice versa. If a scan comprises a large number of
points (>200), the duration of the experiment might exceed the time limit of 10
minutes. This limit was determined from preliminary experiments showing that
changes in the frequency response of the umbo displacement first appear after 15
minutes without moistening the temporal bone. These findings are in agreement with
the work of Ramirez-Garcia (1980). Therefore, a 10-minute time limit was defined for
the duration of the experiment. If the time limit was exceeded, because of a large
number of points, a signal with a lower resolution (multi sine signal) had to be used to
permit shorter measurements. Of course, the number of averages used for one
measurement point is also crucial for the duration of a measurement. In order to
achieve a good signal to noise ratio, a minimum of 15 averages was chosen.
Another limitation of the frequency resolution, as mentioned above, is the maximal
power output of the loudspeaker. This only applies to a multi-sine stimulus which
broadcasts all selected sine waves simultaneously. At the beginning of each time
window (10ms at 100Hz) all sine waves start with a rising slope. Interference of the
sine waves builds a peak in the signal at the beginning of the time window. The peak
was the factor limiting the number of sine waves used and therewith the frequency
resolution. The introduction of phase shifts between the stimulus components could
have spread the stimulus energy in time and reduced the peak at the beginning of
each time window allowing an increase in the number of frequency lines. This was
not done for this study and the number of frequencies was limited to 41 (Tab. III.1).
Under these conditions the loudspeaker allowed a multi-sine stimulus at a maximal
sound pressure level of 90dB and at each frequency. If the first peak of all 41
frequencies coincided, which is not exactly the case since they differ in wavelength, a
Materials & methods
46
total sound pressure level of 106 dB would have been reached. This is given by the
following equation.
(1)
90 dB SPL +10*Log10(41) = 90 + 16 = 106 dB SPL
Due to the difference in wavelength this total sound pressure level was not reached
and equation (1) described the worst case. Since the middle ear does not operate in
a non-linear range at this total sound pressure level (see chapter IV), the
displacements measured at each frequency, at which the system was excited,
correspond to a stimulus at 90 dB SPL. The frequencies used in the multi sine signal
are listed in table III.1. The frequency distribution was not linear, but all selected
frequencies had the same fundamental frequency, namely 100 Hz. The importance
of this is explained later in section III.4.1. Except for some control experiments,
where the periodic chirp was preferred, all measurements performed in this study
used this multi-sine signal.
500
600
700
800
900
1000
1100
1200
1300
III.3.2
1400
1500
1600
1700
1800
2000
2200
2400
2600
2800
3000
3200
3400
3600
3800
4000
4200
4400
4600
4800
5000
5300
5600
6000
6500
7000
7500
8000
8500
9000
9500
10000
Tab. III.1: 41 frequencies were used for the
multi sine stimulus. Therewith a flat stimulus
(same sound pressure level at each
frequency) was reached at a sound pressure
level of 90dB.
Sound calibration
First of all, the characteristics of the microphone (ER7-C) provided by the
manufacturer (Etymotic Research, Elk Grove Village, IL, USA) were checked by
comparing its potential to that of a calibrated microphone (B&K-4134, B&K
Messtechnik GmbH, Rümlang-Letten, Switzerland) which had a flat frequency
response between 0.5 Hz-10 kHz under the same conditions. Both microphones
were exposed to a sweep, which had a frequency resolution of 6.25 Hz and spanned
frequencies between 0.5 and 10 kHz. In parallel, the sound pressure levels of both
microphones were recorded. During this measurement, the ER7-C microphone was
attached to the silicon rubber tube later used in the experiments. The frequency
response of the ER7-C was set in relation to the frequency response of the B&K
microphone, and the relative deviations were calculated (in decibels). The
manufacturer indicated a deviation of ±2.5 dB from a flat response between 0.2-10
kHz. This control measurement yielded maximal deviations of ±1.5 dB and these
deviations are well within the specifications of the manufacturer. In each experiment
the mounting of the AEEC and the acoustic characteristics of the TM presented new
Materials & methods
47
acoustic conditions. Therefore, at the beginning of each experiment the artificial
external ear canal was acoustically calibrated. A flat multi-sine signal was created by
compensating the output level of the signal generator at each frequency in order to
produce a flat response (±3 dB) from the microphone. Figure III.8 shows one
example of a calibrated multi-sine signal. The velocity data of the laser measurement
were finally corrected for these deviations (±3 dB) in sound pressure level.
multi sine signal
100
SPL [dB]
90
80
70
60
50
100
1000
frequency [Hz]
10000
Fig.
III.8:
Calibrated
multi-sine signal. The
acoustic
signal
was
calibrated for the acoustic
characteristics of each
specimen in order to
obtain a flat frequency
response of 90 dB (SPL).
The accuracy of the
calibration procedure was
limited and deviations of
±3 dB remained. In the
analysis the velocity data
were corrected for these
deviations.
In a first measurement (base-line measurement) the umbo velocity was acquired
while stimulating with the aforementioned multi-sine signal which contained 41
frequencies between 0.5-10 kHz each at 90 dB SPL. Immediately before that
baseline measurement a small opening into the MEC through the medial cranial
fossa was made to allow balancing of possible static air pressure differences
between the MEC and the ambient air. After the baseline measurement this opening
was widened to allow visual access to the IMJ. The same measurement was then
repeated and the sound pressure was modified to obtain the same umbo velocity as
under the previously closed MEC condition. Therefore, the vibrations of the ossicles
corresponded to those in the closed MEC under a flat multi-sine signal. In figure III.9
the success of the acoustic compensation is illustrated. The graph shows the
displacement of the umbo for the closed and open MEC conditions and finally the
umbo displacement after sound pressure compensation. Hence, acoustically
compensating for the opening of the MEC was possible and the frequency response
of the umbo simulated the closed MEC condition very well. Finally, the compensated
multi-sine signal was used to measure velocities in the area of the IMJ. These
measurements were performed at several sound pressure levels in order to detect
possible non-linearities in the dynamic behavior of the ossicular chain. An amplifier
(A50, Revox AG, Regensdorf, Switzerland) set between the signal generator and the
loudspeaker (CI-2960, Knowles Electronics, Itasca, IL, USA ) was used to amplify the
signal in a stepwise fashion from 75 to 90dB SPL with increments of 5 dB.
Materials & methods
48
#32 compensation for MEC opening
displacement [nm]
100
10
closed
open
comp.
1
100
1000
10000
frequency [Hz]
Fig. III.9: Three umbo displacement measurements under two different conditions:
closed MEC, flat multi sine stimulus (closed circles); open MEC, same acoustic
stimulus as under the closed MEC condition (open circles); open MEC, acoustic
stimulus compensates for the changes in umbo displacement by the opening of the
MEC (solid grey line). This control measurement was performed in specimen # 32.
III.4
Measurements
III.4.1
SPL recordings
For all measurements performed in this study the sound pressure level (SPL) was
measured close to the TM, with a maximal distance of 3mm from the TM. With the
aid of a tube microphone (ER-7C, Etymotic Research, Elk Grove Village, IL, USA) it
was possible to get very close to the TM without obstructing the lateral view onto the
TM. Using the silicon rubber tube (length: 76 mm; diameter: 0.5 mm) the microphone
had a relatively flat frequency response characteristic (± 1.5 dB) between 0.5 and 10
kHz.
As mentioned in III.3.2 the acoustic calibration of the system for each experimental
situation had a precision of ±3 decibels. Since these deviations were registered by
the microphone, the velocity data were finally corrected for these deviations in SPL in
order to precisely simulate a flat acoustic signal. Therefore, the precision of the SPL
recording was only limited by the accuracy of the microphone itself (± 1.5 dB) which
was earlier defined in comparison to a calibrated microphone membrane (B&K4134). Since the stimulation had not a linear frequency distribution, the recording of
the acoustic signal as well as the displacement had a resolution of 50 Hz. This way
all frequencies, at which the system was excited, were detected.
Materials & methods
III.4.2
49
LSDV measurements
At the beginning of each measurement the following settings were verified:
•
•
•
•
•
•
The measurement range was set to 10mm/s/V.
The length of the FFT time window was set to 10ms (fundamental frequency =
100 Hz) for the multi sine signal.
The frequency response was recorded at a resolution of 50 Hz.
No weighting filter was used for the FFT time window, since all stimulation
frequencies fitted the FFT time window of 10ms by a multiple.
The frequency range was set between 0.5-10k kHz.
15 averages were made for each measurement point
III.4.2.1 Umbo displacements
Umbo displacement measurements are commonly used to describe middle-ear
characteristics. Sound energy is partly collected by the TM and transmitted to the
malleus. Apart from the lateral process of the malleus, the umbo is the structure most
tightly connected to the TM especially by the radial fibers. The manubrium is also
attached to the TM between the lateral process of the malleus and the umbo, but the
connection allows relative motion between the manubrium and TM (Graham 1978).
Therefore, when approaching the ear from the lateral side, the ossicular motion is
best reflected by the motion of the umbo.
Several measurement points were defined in the area of the umbo (Fig.III.10).
As mentioned above (III.2.1), pressure balance between the MEC and the
environment was enabled by a small opening into the MEC through the medial
cranial fossa. Immediately before the measurement this opening was sealed and the
area of the umbo was covered with a thin layer of silver powder (Sigma-Aldrich,
Steinheim, Germany). The purpose of this silver powder and its effects are explained
in section IV.1.1.
a
b
c
Fig. III.10: Lateral view of the TM through the artificial external ear canal (AEEC). (a)
The umbo, the course of the manubrium and the lateral process of malleus (lpm)
shown through a translucent TM. (b) Prior to the measurement the area around the
umbo was covered with a thin layer of silver powder. (c) A grid of measurement
points was defined in the area of the umbo and the sound pressure level close to the
TM was registered by a probe tube microphone.
Materials & methods
50
This first umbo measurement (base-line measurement) provided some basic
information about the dynamic behavior of the middle ear under closed MEC
conditions and allowed one to compare the results gained from the temporal bones
used in this study with results of former temporal bone experiments. In the next step
of the experiment, these measurements also provided information for the simulation
of the closed MEC after opening the MEC. This procedure is described in paragraph
III.2.1. Opening the MEC indeed changed the impedance of the umbo. The sound
pressure compensation could only simulate the displacement amplitude of the closed
MEC but not the phase. With respect to the sound pressure level at the TM, opening
the MEC changed the phase of the TM’s mechanic response and this change in
phase was irreversible as long as the MEC remained open. Since the interest was
focused on relative motions between the malleus and incus, changes in the phase of
the input (umbo displacement) did not affect the results and were not changed by
opening the MEC either. Looking at the ossicular motion of the middle ear, the
motion of the umbo was considered as the input to this mechanical system.
III.4.2.2 IMJ measurements
This paragraph describes the general procedure of IMJ-measurement, (also called
IMJ-scan). As described in section III.2.1 the MEC was opened widely in order to
provide maximal visual access to the IMJ but preserving the inner ear. Since the size
of the MEC and its relative internal dimensions varied between the specimens used
in this study, standardizing the procedure, approach and final orientation of the
temporal bone to the laser head was difficult. In some temporal bones the distance
between the IMJ and the superior semicircular canal was rather large and allowed an
almost perpendicular (90°) view onto the body of the incus, whereas in other
temporal bones theses structures were much closer together and, therefore,
demanded another angle of incidence. This problem is illustrated in figure III.11.
Fig. III.11: The angle of incidence
of the laser beam varied with the
spatial situation of the MEC. In
situation 'a' the distance between
the IMJ and the superior semicircular canal is relatively large and
makes an almost perpendicular
measure-ment ('A') on the body of
the incus possible. In case 'b' the
IMJ and the superior semi-circular
canal leave a narrower gap which
leads to a deviation from the
optimal angle of incidence (90°)
('B'). The angle of incidence was
optimized for each specimen.
Materials & methods
51
In order to standardize the angle of incidence of the laser beam the measurements
should have been adapted to the worst case (narrowest MEC). However, since the
angle of incidence, once chosen, was fixed for each specimen, and since the worst
case situation was unknown at the beginning of this study, the measurement
situation was optimized for each specimen taking into account that the angle of
incidence varied between the specimens. In the first part of the experiments only
relative motions between malleus and incus were of interest and the angle of
incidence did not affect those results.
However, in the second part, reconstructing displacements of 'hidden' structures (see
paragraph III.5.2.3 and III.5.6) within a rigid body was affected by the angle of
incidence. The reconstructed displacements were aligned in parallel with the laser
beam.
Once the temporal bone was oriented (Fig. III.12a) the outline of the IMJ was defined
(Fig. III.12b). The spatial resolution of the grid was set resulting in a grid comprising
of 250-300 points for the IMJ-area (Fig. III.12c). An image was automatically
captured at the beginning of each measurement showing the IMJ area and the
measurement grid. During the measurement the LDSV automatically recorded the
displacement at each point on the selected grid. The corresponding coordinates and
the complex form of the sinusoidal velocity at each frequency and measurement point
were stored.
a
b
c
Fig. III.12: (a) At the beginning of each measurement the temporal bone orientation
was optimized for the IMJ-measurement. To the right side of the picture the ossicular
chain is obscured by the osseous capsule of the inner ear (superior semi-circular
canal). The body of the incus, the IMJ and the head of the malleus were exposed. (b)
The outline of the visible part of the ossicular chain was marked by the cursor. (c) The
area of the measurement grid was defined.
III.4.3
IMJ-fixation
In some temporal bones the IMJ was experimentally fixed in order to quantify the
transmission losses caused by the mobility of this joint. This experiment constituted
the second part of the study and therefore includes a reduced number of temporal
bones (15). The opening through the medial cranial fossa provided enough access to
the IMJ for the following procedure which is schematically illustrated in figure III.13.
Materials & methods
52
The articular capsule was cut with a sickle knife only at the medio-superior side so
that the cohesion of the remaining capsule was still strong enough to hold the
articular surfaces of the malleus and incus together. Soft tissue within the articular
gap was removed and the gap was widened with a small drillbit (diameter = 0.3 mm).
The resultant groove had a depth of about 0.5 mm. The groove stretched across the
length of the articular gap at the medio-superior side of the IMJ.
The groove and the joint area were rinsed, cleaned and afterwards superficially dried
with a gas jet. In addition the groove was desiccated with the tip of a hot welding arc.
Care was taken during that procedure not to touch the superior malleolar ligament.
Kobayashi (1955) stated that the superior ligament of the malleus has no ligament
structure and therefore probably does not contribute to the mechanics of the middle
ear. Kobrak (1959) stated that "the superior band has practically no significance" and
he removed it for his experiments. Nevertheless, the aim was to preserve all middleear structures. Finally, the groove was filled with general purpose resin (TRAD,
Unifast, Leuven, Belgium). Slightly spreading the IMJ immediately after applying the
resin allowed the latter to infiltrate into the intra-articular space and resulted in a
better fixation of the IMJ. After ten minutes the resin was dry. The temporal bone
was amply moistened and ready for the next IMJ measurement. The holder of the
temporal bone was repositioned in the goniometer and the IMJ-measurement was
repeated from the same direction and with the same measurement grid used before
the fixation of the IMJ.
a
b
c
d
e
f
Fig. III.13: Partly schematic illustration of the IMJ-fixation. (a) Area of the IMJ with the
intact joint. (b) The joint capsule was cut open with a sickle knife and the loose tissue
was removed. (c) A very fine dental drill bit was used to widen the articular gap up to
a groove about 0.6 mm in with. (d) The groove was filled with a general purpose
acrylic resin. (e) When the experimental fixation succeeded malleus and incus were
tightly coupled after 10 minutes of drying.
Materials & methods
III.5
53
Data analysis
The goal of the analysis was to produce quantitative results reflecting the dynamic
behavior of the ossicular chain which would allow comparison of the various temporal
bones investigated. One major difficulty was the standardization of the measurement.
There are no landmarks on the temporal bone that allow absolute positioning, since
the specimens varied in size and the relative position of landmarks within each
temporal bone varied too (see III.4.2.2).
In order to quantitatively describe the motion of an object, its dimensions and the
dynamic behavior of some points to which discrete locations can be assigned have to
be known. The LDSV provides this information and the demonstration mode gives a
good insight into the dynamics of the ossicular chain. However, for quantification
purposes the data had to be processed by a custom-made 'Matlab' algorithm. A
coordinate system was introduced, which was adjusted to each specimen. This
enabled the splitting of the complex motion information into components which are
easier to read and interpret.
The custom-made algorithm first adjusted the coordinate system to the parameters
given by each specimen and split the complex motion into three motion components.
Finally, the algorithm evaluated the displacement of structures (umbo; LPI), which
were located on a rigid body (malleus, incus) but out of sight during the
measurement.
The analysis procedure is described step by step in the following subchapters. The
format of the data stored by the measurement software (PSV 6.14, Polytec) could not
directly be imported by the analysis program (Matlab 6.1) but had to be exported as a
'universal file'. This format allowed the selective extraction of data by frequency or
reference number of the measurement points. Since velocity data were also recorded
at frequencies at which the system was not acoustically excited, the stored data were
first selectively filtered for frequencies covered by the stimulus. Then, the data was
further filtered by point numbers based on their measurement quality (see III.5.4).
The resulting reduced data set provided the basis for the description of the ossicular
motion.
III.5.1
The coordinate system
Two types of coordinate systems are mentioned in the next two paragraphs. One is
provided by the measurement system, the other was introduced in order to compare
better the results of all tested temporal bones. The two coordinate systems and the
technique used to transform the coordinates from one system into the other are
described in the following sections.
III.5.1.1 Intrinsic coordinates
The scanning system offers an automatic allocation of coordinates to the points of
the measurement grid. This will be referred to as the 'intrinsic' coordinate system
Materials & methods
54
since its scale and orientation are given by internal parameters of the measurement
system. The z-component (depth) was set to zero from the start, leaving a twodimensional (x, y) coordinate system. The axes were aligned to the horizontal rows
and the vertical columns of the grid.
The points of the leftmost column were in line with the y-axis whereas and the points
of the bottom row were in line with the x axis (Fig. III.14). The coordinates provided
by the intrinsic system were used only as relative values for the analysis. The points
of the grid were further consecutively numbered starting with '1' for the first point of
the first row and ending with 'n' for the last point of the last row. These reference
numbers were maintained throughout the analysis.
Fig. III.14: The picture shows the IMJ-area after
removing parts of the inner ear. The
measurement grid indicates the view on the
IMJ-area when the inner ear was still intact. The
allocation of coordinates was automatically
done by the measurement system. The points
of the leftmost column are in line with the y-axis
and the points of the bottom row are in line with
the x axis. All points were consecutively
numbered from the top left to the bottom right.
The scale bar served as reference.
III.5.1.2 Virtual coordinates of the IMJ
In order to compare the quantitative results gained from LDSV-measurements on the
IMJ of different bones a virtual coordinate system, aligned with anatomical landmarks
was introduced. The assignment of absolute coordinates to the grid had to be related
to the anatomy of the ossicular chain and as far as possible to their degrees of
freedom and dynamic modes. The term 'virtual' coordinate system is used here, since
its orientation was aligned with the anatomy and based on knowledge regarding the
mechanics of the ossicular chain obtained from former investigations by other
researchers, but still artificially introduced in order to allow comparison of the various
specimens investigated.
The three-dimensional surface topography of the IMJ-area was reduced to a twodimensional map defined by x- and y-coordinates. Three landmarks of the incus were
used for the alignment of the two axes (figure III.15).
The y-axis passed through the posterior ligament of the incus and the indentation
edge of the incus at the IMJ. The orientation of the y-axis coincided with an often
described axis of rotation observed by several researchers (Dahmann, 1930
;Helmholtz, 1868; Gundersen & Høgmoen, 1976). Orthogonally oriented to the yaxis, the x-axis needed one more landmark to define the coordinate system. This
landmark was the superior edge of the incus at the IMJ. The x-axis was laid through
the IMJ, since the amount of rotation about this virtual axis is largest when its location
Materials & methods
55
hits the point of deflection, namely at the joint. The polarities of the axes were
correlated to the same anatomical landmarks for right and left ears.
Fig. III.15: Alignment of the virtual coordinate
system. Three anatomical landmarks on the
incus were used. in = indentation of the incus
at the IMJ-edge; se = superior edge of the incus
at the IMJ; sp = tip of the short process of the
incus. The coordinate system had its point of
origin on the IMJ. The polarities of the axis
referred to the same anatomical landmarks in
left and right ears. The x axis pointed towards
the umbo and the LPI and the y-axis towards
the short process of the incus.
III.5.1.3 Matching the virtual and intrinsic coordinate systems
It is apparent that the two coordinate systems differ in scale and orientation.
The distance between the object of interest and the laser head changed with each
studied object, which in turn changes the scale of the measurement grid. In addition,
the coordinate system that was related to anatomical landmarks (virtual coordinate
system) did not overlap with the coordinate system applied by the system (intrinsic
coordinate system), since the orientation of the temporal bone was not standardized.
Therefore, the intrinsic coordinates allocated by the system had to be transformed in
order to match the virtual coordinate system. This task was the first part of the
customized 'Matlab' algorithm, which required some parameters to be evaluated
beforehand. These evaluations were based on a hard copy showing the information
presented in figure III.14, the anatomy of the IMJ-area, the measurement grid and the
scale bar. How the necessary parameters were evaluated is described as follows:
The two coordinate systems had to be merged by shifting and turning the intrinsic
coordinate system until it overlapped with the virtual coordinate system. Both axes,
the x and the y axis, were shifted parallel until the two centers of origin matched (Fig.
III.16a). The reference number of the virtual coordinate system center of origin (e.g.
115) was then used by the algorithm. The coordinates of all points of the intrinsic
system were then changed according to the shift of the center of origin from the
original position to point '115'. In a second step the angle between the intrinsic and
the virtual systems was evaluated (e.g.+102°), which provided a second parameter to
the algorithm (Fig. III.16b). All points of the grid were then changed according to this
angle, The two coordinate systems now coincided. In a last step the virtual
coordinate system was scaled in order to reflect the real dimensions of the ossicular
chain. Two points of the measurement grid were selected: one at the tip of short
process of the incus (e.g. 186), the other in the center of the IMJ (e.g. 115), where
the coordinate system had its point of origin (Fig. III.17).The distance between them
Materials & methods
56
was evaluated using the scale bar as a reference (Fig. III.14). The algorithm was fed
with the two reference numbers of the selected points, and the evaluated distance
between them. The program then automatically rescaled the intrinsic coordinate
system.
a
b
Fig. III.16: Merging of the intrinsic and the virtual coordinate systems. (a) In a first
step, the intrinsic system was shifted in order to match its center of origin with that of
the virtual system. (b) In a second step, the intrinsic system was rotated around the
center of origin, so that the two coordinate systems finally coincided.
Fig. III.17: Scaling of the measurement grid.
The scale bar was used as a reference. Two
points, one at the tip of the short process of
the incus (186), the other in the center of
origin of the coordinate system (115), were
selected. Besides the two reference
numbers, the absolute distance between
these two points (4.8 mm, arbitrary value)
was evaluated using the scale bar.
III.5.1.4 Coordinates of 'hidden' structures
When the IMJ-measurements were completed parts of the inner ear (at least the
superior semicircular canal) were removed to provide visual access to the umbo and
LPI from the medial aspect through the medial cranial fossa. The m. tensor tympani
was resected and only an narrow bony rim around the stapes footplate remained.
Thereafter, the umbo and LPI became visible from the same position from which the
IMJ-measurements were performed (Fig. III.18a,b). A still image was taken from this
perspective and superimposed onto the picture taken before the first IMJ-scan (Fig.
Materials & methods
57
III.18c). The picture illustrating the measurement grid was combined with the picture
showing the previously hidden structures (umbo and LPI). The virtual coordinate
system allocated coordinates to these two structures (Fig. III.18d). The coordinates
of these two structures were evaluated by applying the scale and the orientation of
the virtual coordinate on a hard copy. These coordinates were then used for the
displacement reconstruction of the umbo and LPI. The coordinates were applied to
the rigid-body motion equation as described in III.5.6.
a
d
III.5.2
b
c
Fig. III.18: Registering of the umbo- and the LPIcoordinates. (a) A picture was captured before the
IMJ-measurement when the inner ear was still intact.
(b) Another picture was captured after removal of the
inner ear. (c) Picture 'a' and 'b' are superimposed. (d)
Based on the specified coordinate system, x and y
coordinates were assigned to the umbo and LPI.
Degrees of freedom
The motion of a body in a three-dimensional space theoretically implies six degrees
of freedom, three rotational (ωx, ωy, ωz) and three translational (vx, vy, vz) degrees
(Fig. III.19a). In order to capture the motion along all six degrees of freedom several
measurements are needed. The degrees of freedom indicated in this figure are
aligned with the virtual coordinate system. The three translational degrees of freedom
are in line with the axes of the coordinate system whereas the rotational degrees of
freedom rotate around the corresponding axes. Any kind of motion can be described
by six degrees of freedom. In order to define all six degrees of freedom, velocity
measurements must be performed from at least three different directions, ideally in
line with the three axes of the virtual coordinate system. In this study velocity
measurements were only performed from one direction. In the control experiment
IV.4 the contribution of each of the three translational degrees is shown. Due to a
single measurement direction, the degrees of freedom were reduced to three, namely
two rotational degrees (ωx, ωy) and one translational degree (vt).
The motion at the IMJ was only measured from the medio-superior aspect (Fig.
III.19b). These motion components are separately sketched in figure III.20. Each
Materials & methods
58
component describes a very simple motion, either a translation of the plane or a
rotation about one axis. The combination of the three components allows the
description of any dynamic behavior, as it could be detected by the LDSV when the
laser beam is in line with the z axis (Fig. III.19b). All three components oscillate
symmetrically around a zero position when excited by a sinusoidal sound wave. The
arrows indicating the three motion components in this figure point in the direction of
the positive phase of their oscillation. The upper right quadrant of the coordinate
system emphasized in figure III.19b (grey area), encloses all points on the plane
which add up in displacement when the three motion components are in phase. This
rule can only be applied to this quadrant.
a
b
Fig. III.19: (a) The motion of an object in a three-dimensional space is described by
six degrees of freedom. The three rotational and three translational degrees of freedom
are shown in relation to the virtual coordinate system. (b) The direction of the laser
beam is indicated by the dashed arrow. The degrees of freedom are reduced to three:
two rotational (ωx, ωy) and one translational (vt). Since 'vz' is the only remaining
translational component its notation was modified to 'vt'. For the upper right quadrant
(grey area) of the coordinate system, all three motion components act together in a
constructive way when they are in phase.
This ensures that the displacement of a certain point on this plane is highly
influenced by the phase at which the three motion components act together. The
contribution of certain components to the displacement of a specific point is also
affected by the position of the point. The further away a point is located from an axis,
the greater the contribution of the rotational component about this axis is. A point in
the center of origin (x=0; y=0) can only undergo a translation. Pondering over the
contribution of the three motion components and their phase interplay for an arbitrary
point in the plane reveals the complexity of a single motion point. Once the interplay
of the three components is understood, the orientation and position of the virtual
coordinate system becomes irrelevant. Any dynamic behavior described by
displacements along the z-axis can be described by the three degrees of freedom,
Materials & methods
59
independent of their position and orientation, as long as two axes (x and y) are
embedded in the plane. What will change is the contribution of a motion component
and the phase at which they interplay. The following theoretical example illustrates
this as follows: The ossicular chain performs a mere rotation about the virtual y axis
as it is indicated in figure III.20 (right). The rotation about the virtual y axis describes
this motion completely and alone. Now, the virtual y axis is shifted parallel along the x
axis. In addition to the y rotation the contribution of the translational component is
needed in order to describe this dynamic behavior. It becomes also clear that the two
motion components can not move in phase, because along the real axis of rotation
the introduced translational component must be compensated by a
countermovement of the rotational component.
Fig. III.20: The three motion components are separately sketched: (left) The
translation is described as an oscillation of the two-dimensional plane along the z
axis. (center) The x rotation is described as an oscillation of the plane about the x
axis. (right) The y rotation is described by an oscillation about the y axis. The arrows
describing the three motion components point towards the positive phase of their
oscillation.
III.5.3
Measurement point selection
The data of all measurement points were assumed to lie in a plane. In order to
prevent large deviations between the three dimensional body and the abstracted two
dimensional body, reading points at the border of the ossicles were not considered in
the analysis. Not simply because they deviated more from the virtual plane than the
more central points but more importantly because even small ossicular movements at
the edges of the ossicles, which are perpendicular to the laser beam (along the
virtual x or y axis), are detected by the LSDV. The larger the angle is between the
virtual plane and the tangent at the position of a certain reading point, the larger the
measurement along the z axis is affected by motions along the x or y axis. This
Materials & methods
60
phenomenon is illustrated in Figure III.21. These points were identified in the
presentation mode of the software (PSV 6.14, Polytec), noted and excluded from the
analysis. Less than 5% of all measurement points were usually affected by this
phenomenon. This specific point exclusion was done in a manual procedure,
because the following selection criterion (selection by coherence) is not sensitive to
this phenomenon. To estimate the degree of noise contamination in a measurement,
and therefore the quality of the measurement, the coherence function is used. This
function indicates the degree of causality in a frequency response function, or the
correlation between the input and the output function. When the value of the
coherence function is zero the output is caused totally by sources other than the
measured input, otherwise when the value of the coherence function is one, the
measured response is caused totally by the input. The following scheme illustrates
the interrelation of the frequency response function (FRF), the input (A, measured
acoustic stimulus) and the output (B, measured velocity) of the system and noise.
Input
without noise
Output
without noise
FRF
Input
noise
Input
with noise
A
Output
noise
Output
with noise
B
'H1' and 'H2' are two estimates of the frequency response function, of which 'H1'
does not and 'H1' does consider the output noise of channel B. The two estimates
are given by the following equations, where 'Im' is the auto spectrum of the input
noise, 'Ix' the auto spectrum of the input signal without noise, 'On' the auto spectrum
of the output noise and 'Oy' the auto spectrum of the output signal without noise.
(2)
H1 = FRF / (1 + (Im / Ix))
H2 = FRF *(1 + (On / Oy))
Coherence 'γ2' is given by the following equation:
(3)
γ2 = H1 / H2
Since the output of the system is measured by the Laser-Doppler vibrometer, any
motion of an object detected by the laser will affect the coherence. At the edge of an
ossicle where the angle between the virtual plane and the tangent increases, the
detected velocity increases as well. Even though the detected velocity was not
Materials & methods
61
induced by a motion along the measurement axis, it would cause an increase in
coherence. Consequently, the artefact assumes a high quality measurement and this
is the reason why the aforementioned selection was performed manually. The
remaining measurement points were selected according to their coherence. Only
measurement points with coherence greater than 0.9 entered the analysis. Hence, a
group of about 20 to 25 measurement points per ossicle remained.
Fig. III.21: Measurement artefacts
induced by motions perpendicular to
the
measurement
axis.
(left)
Measurement area of the LDSV.
Towards the edge of the measurement
area the angle (α) between the plane
(p) and the tangent (t) increases. (topright) Mere translation along the
measurement
axis.
(bottom-right)
Additional translation along the x or y
axis of the virtual plane. The grey area
indicates the total displacement
measured
from
the
indicated
measurement direction. At the border
of the measurement area the small
additional motion component induces a
measurement
artifact.
Therefore
reading points close to the border were
excluded (light grey areas).
III.5.4
The rigid-body motion equation
The reduced set of measurement points and their corresponding x and y coordinates
were the basis for the description of the complex motion by the three motion
components. The 3-dimensional behavior of a rigid body is entirely described by the
following equation:
(2)
⎡v x =v x t + (ω y ×r z−ω z ×r y)⎤
r r
r r ⎢
⎥
v = vt + ω × r = ⎢v y =v y t + (ω z ×r x−ω x ×r z)⎥
⎢v =v t + (ω ×r −ω ×r )⎥
x y
y
x ⎦
⎣ z z
Since the IMJ-measurements derived only from a single direction (along the z-axis)
no information concerning motions along the x and y axis were available. Therefore
these values were set to zero. In addition, the coordinate system was reduced to two
Materials & methods
62
dimensions (x and y) and the z coordinate could be ignored. The equation (2) is
thereby reduced to:
(3)
v z=v zt + (ω x ×r y−ω y ×r x)
Based on equation (3) the three velocity components (the translational component
(vzt) and the two rotational components (ωx and ωy)) were calculated at each
frequency tested and separately for both, malleus and incus. Since 'vzt' was
measured by the LSDV and 'ry' and 'rx' were known locations of the coordinate
system, only 3 unknown variables remained (vzt, ωx, ωy). For the analysis 25 points
were used, which leads to an over-determined system given by 25 equations. This is
shown in equation (4).
(4)
⎡ v z P1⎤ ⎡1 r y P1 −r x P1 ⎤
⎥ ⎢1 r P 2 − r P 2⎥ ⎡v z t ⎤
⎢
2
v
P
y
x
z
⎥ ⋅ ⎢ω ⎥
⎥=⎢
⎢
⎢ M ⎥ ⎢M
M
M ⎥ ⎢ x⎥
⎥ ⎢⎣ω y ⎥⎦
⎥ ⎢
⎢
⎣⎢v z Pn ⎦⎥ ⎢⎣1 r y Pn − r x Pn ⎥⎦
The over-determined equation was solved by the least square fit method, which
minimized the square sum of the deviation of the measured data from the
mathematical model described by equation (3). The transfer function (TF) was
calculated for each motion component (TFvt, TFωx, TFωy) in order to characterize the
transmission properties of the IMJ. RI and RM represent the maximal displacements
(amplitude) of the incus and malleus, respectively.
(5)
TF =
RI
R
= I × e jω (ϕ I −ϕ M )
RM RM
The transfer function consists of the magnitude (R), which is a ratio indicating the
amount of each motion component that is transferred from the malleus (M) to the
incus (I), and the phase (PH).
(6)
R=
RI
RM
PH = (ϕ I −ϕ M )
In figure III.22 the amplitude of the transfer function (Rωy) is visualized and formally
described. If the IMJ is functionally fixed, the two ossicles are supposed to move as
one rigid complex. Therefore, all three motion components must be equal with ratios
of 1.0 and phase values of zero. If the IMJ is mobile, ratios different from 1.0
(generally lower) would be expected and a frequency dependent phase should
appear. Ratios less than 1.0 indicate a transmission loss in a certain motion
component.
Materials & methods
63
Fig. III.22: The amplitude of the transfer
function Rωy is formally and schematically
illustrated. It is given by the maximal angular
displacement of the incus about the y-axis
divided by the maximal angular displacement of
the malleus about the same axis.
III.5.5
The displacement reconstruction of 'hidden' structures
The measurement procedure allowed the displacement reconstruction of structures
which were not accessible during the measurement. It was of interest to evaluate the
transfer function of the middle ear by calculating the input and output of the ossicular
chain. Since both stapes and incus are linked by a flexible joint, the incudo-stapedial
joint, the motion reconstruction of the stapes was impossible. Only displacements of
rigid-body structures, parts of which were acquired by the laser measurement, could
be reconstructed. The most distal and proximal structures that fulfill this demand are
the umbo and LPI, respectively.
The procedure for determining the coordinates of these structures was described in
chapter III.5.2.3. The motion of the two rigid bodies, of which each structure is a part,
was calculated by the rigid-body motion equation (see chapter III.5.5). Again, this
equation was applied in order to calculate the displacement of positions outside the
measurement area.
(7)
r
r
vz = vzt + (ωx ∗ ry − ωy ∗ rx )
The three motion components (vt, ωx, ωy) and the x and y coordinates completely
describe the reconstructed displacement (vz), which is again in line with the
measurement axis (z axis). The procedure was performed twice, once for the umbo
and once for the LPI, regarding the corresponding coordinates and motion
components
.
64
Chapter IV
IV
Control experiments
Accuracy and power of statement of a measurement are determined by the
measurement- and analysis techniques applied. The effect of some techniques used
in this study had to be tested prior to the main experiment in order to verify that the
dynamic properties of the mechanical system were not changed by the use of these
techniques.
As mentioned in chapter III the umbo and the IMJ area of were covered with a thin
layer of silver powder. Thereby, the reflectance of the test surface was improved.
However, the additional load of silver powder might have affected the dynamics of
the ossicular chain. A tool which should increase the measurement quality was
offered by the software package, the "signal enhancement" tool. By slightly changing
the position of the laser beam (15 microns), spots on the test surface with low
reflectance were circumvented.
The description of the complex motion was based on several measurement points
acquired during an IMJ-scan. Like all measuring techniques, Laser Doppler
measurements are subject to noise and artifacts. The more points used for the
analysis procedure, the more stable the motion description became. How many
points are necessary to yield stable and reliable results?
Measurements on the IMJ were only performed from a single direction. As a
consequence, only three motion components could be detected, the other three were
ignored. Is the reduction of the mechanical system to three degrees of freedom
legitimate?
The displacement reconstruction of "hidden" structures was based on the assumption
that the three motion components were correctly evaluated and that a projection of
these components to a position outside of the measured area but still on the same
rigid body yielded reliable results. Was this assumption correct?
The control experiments in this chapter shall answer these questions.
Control experiments
IV.1
65
Accuracy of Laser Doppler Measurements
In general Laser Doppler Vibrometry is able to detect displacements down to the
order of picometers (10-12 m). This is only possible when the conditions are optimal,
which is usually not the case when a biological system is the object of interest. The
following paragraphs provide an overview of the various problems that might occur
when measuring on biological tissue and presents some techniques in order to
improve the measurement conditions.
IV.1.1
Reflectance and the use of silver powder
The accuracy and reproducibility of Laser Doppler Measurements depend mainly on
two parameters, the amount of reflected light and the intensity of the signal (signal-tonoise ratio). The wavelength of the emitted laser beam changes when it hits a
moving object. The velocity of the measured object is calculated by comparing the
differing wavelengths of the emitted and reflected laser beams. Since the wavelength
of the emitted laser beam is constant and known, the velocity information is only
provided by the reflected laser beam. The intensity of the signal carrier constitutes a
first crucial parameter which depends on the focusing of the laser beam and the
surface properties of the object to be measured. The ideal surface reflects 100% of
the impinging light back towards the laser head, something which is never achieved
by any real surface. The surface properties of the object in question can be optimized
by covering it with a thin layer of reflective material. In this study pure (99.9%) silver
powder (Sigma-Aldrich Chemie, Steinheim, Germany) was used in order to enhance
the amount of reflected light. The diameter of the silver particles ranged between 2
and 3.5 microns and the amount of silver used per IMJ-area varied between 0.1 and
0.3 mg. For umbo velocity measurements, only the very center of the TM was
covered with silver powder whereas for IMJ measurements the entire incus body and
malleus head were covered. In order to achieve a homogeneous dispersion of the
silver particles a duster similar to that depicted in figure IV.1 was used. The duster
dispersed the silver powder by homogenously covering the object with silver
particles. Since the silver particles add weight to the structure they cover, they also
affect the dynamic behavior of the mechanical system.
Fig. IV.1: Pure silver powder was
dispersed over the IMJ area using the
shown duster. By pressing the balloon air
was pumped through the glass bottle and
the silver powder was whirled up and
blown out through the steel tube. The latter
was relatively long (ca. 8cm) and allowed
an accurate application of the silver
powder; scale bar = 5cm
Control experiments
66
Whether or not they cause significant changes in the frequency response of the
system is unknown. Hence, this was tested in two experiments. First, the umbo
displacement was measured in a temporal bone that showed surface properties
which allowed measurements without the use of silver powder. The umbo
displacement was measured twice, once before and once after covering the umbo
with silver powder. The multi sine stimulus was applied at a sound pressure level of
70 dB. Each measurement was repeated ten times in order to test its reproducibility.
The mean frequency responses and standard deviations of all ten measurements are
shown for both cases, with and without silver powder, in figure IV.2. Umbo
displacements and standard deviations are indicated for measurements without
(upper graph) and with the use of silver powder (lower graph).
Fig. IV.2: (upper graph)
Umbo displacement with
standard deviations before
the use of silver powder.
(lower graph) Umbo displacement and standard
deviations after the application of silver powder (solid
line) and the mean values of
the upper graph (open
circles).
The
frequency
responses are similar for
both
experiments.
The
standard deviations were
reduced by the use of silver
powder. Standard deviations
are not indicated in the lower
graph because they were too
small to be noticed. The
control
experiment
was
performed in specimen #59.
#59 umbo silver test at 70 dB (SPL)
displacement [nm]
10
1
without silver
displacement [nm]
0.1
10
1
0.1
100
without silver
with silver
1000
frequency [Hz]
10000
The mean values of umbo displacement before the application of silver powder are
indicated in the lower graph by open circles. The frequency response of the umbo
displacement was maintained after applying silver powder. The maximal deviation
between the mean displacements of the two measurements was 0.81 dB (at 9.5 kHz)
with a mean (over all frequencies tested) deviation of 0.26 dB. Even at high
frequencies where the effect of additional mass was supposed to be more
conspicuous, the frequency response was maintained after the application of silver
powder. Since these results were based on 10 repetitive measurements and only one
measurement was performed during the main experiment the standard deviations
Control experiments
67
were of interest because they reflected the reproducibility of the measurement.
Relative values (%) of the standard deviations (related to the mean value;
st.dev./mean*100) were calculated. It turned out that the mean relative standard
deviation (average over all frequencies) was reduced by almost a factor of 5 with the
use of silver powder (m.r.std = 14.8% without silver; m.r.std = 3.4% with silver).
These results point out that the use of silver powder does not affect the dynamics of
the umbo in a significant way, but increases the consistency and reproducibility of the
measurement.
A similar control experiment was performed for IMJ measurements. The IMJ area
was measured before and after covering it with silver powder. The "signal
enhancement" feature (see IV.1.3) was enabled in both measurements. Instead of
repeating the measurements ten times, the data of both measurements (before and
after applying silver powder) were analyzed ten times with each time using a different
arbitrary set of 15 measurement points per ossicle. Since the ossicles are rigid
bodies their measurement points are supposed to move in a plane. In the rigid-body
motion equation, each point included contributes to the motion of the plane. The
motion of the plane was given by three motion components: one translation and two
rotations (see III.5.2). Assuming that the measurement points were not perfectly
consistent (not within one motion plane) and since all 10 analysis procedures
comprised different sets of measurement points, the motion of the 10 planes were
expected to differ. The more consistent the measurement points within one plane
(one ossicle) were, the less the three motion components differed. The use of silver
powder was supposed to increase the consistency of the measurements as it did for
umbo displacement measurements and therewith to decrease the deviations
between the ten motion planes. The scattering of the ten repetitive analyses was
again reflected by the relative standard deviations. Figure IV.3 shows the amplitude
of the transfer function of the rotational component ωy (Rωy = ωyI / ωyM). The
frequency response was minimally affected by the use of silver powder. Except for a
slight shift of the peak after application of silver powder towards higher frequencies
(from 1.6 to 1.7 kHz), the frequency responses are very similar. If the shift of the peak
was due to the additional load (silver powder) of the incus a downward shift would be
expected. Hence, it is more reasonable that the peak shift is due to the effect of
dehydration since the experiment using silver was performed after the experiment
using no silver. Following the protocol, the experiment lasted 15 minutes and the
ossicles were not moisturized in between the two measurements. In general, the
values of the lower graph (with silver powder) are enclosed by the standard
deviations of the upper graph and, therefore, the deviations caused by the application
of silver powder can be considered to be small. The mean relative standard deviation
(over all frequencies) was drastically reduced from 33% to 8% by the use of silver.
From these two control experiments one may conclude that the dynamic behavior of
the ossicular chain is not significantly affected by the use of silver powder, but the
quality of the measurements, both consistency and reproducibility, is improved.
Therefore, silver powder was applied to all experiments in this study. The reader
might have noticed that the first (umbo-silver test) and the second (IMJ-silver test)
experiment were performed at different sound pressure levels, at 70 dB and 90 dB,
Control experiments
68
respectively. The reason for this is based on the fact that the sort of test applied in
order to estimate the quality of the measurement is more susceptible if the signal-tonoise ratio is smaller. Since mean displacements were significantly smaller at the IMJ
than at the umbo or the LPI (see next section), this had to be considered in the
control experiment. In order to detect the effect of silver powder application, the
measurement at the umbo was performed at 70 dB (SPL). The mean displacements
at the IMJ were of a similar dimension when excited at 90 dB (SPL).
Fig. IV.3: (upper graph)
Amplitude of transfer function
TFωy (Rωy) and standard
deviations before the use of
silver powder. (lower graph)
Amplitude of transfer function
TFωy (Rωy) after the application of silver powder (solid
line) and the mean values of
the upper graph (open
circles). After the application
of silver powder the peak of
the frequency response is
slightly shifted to higher
frequencies (from 1.6 to 1.7
kHz). The overall frequency
responses before and after
the application of silver
powder are very similar. The
control
experiment
was
performed in specimen #33.
#33 IMJ-silver test at 90 dB (SPL)
amplitude
1
0.5
without silver
amplitude
0
1.0
0.5
0.0
100
without silver
with silver
1000
10000
frequency [Hz]
IV.1.2
Signal-to-noise ratio
Another parameter that affects the accuracy and reproducibility of a laser Doppler
measurement is the signal-to-noise ratio. Every measuring device has a certain
amount of internal noise which is usually constant (not dependent on the amplitude of
the measured signal). Noise in a moving object adds to that internal noise. The more
a measured signal exceeds the noise level, the higher the signal-to-noise ratio and
therewith the accuracy and the reproducibility of a measurement are. Since the
ossicular chain constitutes a lever system with its rotational axis close to the IMJ,
displacements in the joint area are much lower than at the umbo or the long process
of the incus. In figure IV.4 the displacement at the umbo and the mean displacement
Control experiments
69
of measurements points on the malleus head are illustrated. The standard deviations
for the ten selected points measured on the malleus head are indicated Although
excited at the same sound pressure level (90dB), the displacement differed in the
mean by 16.6 dB (± 3.8 dB). Consequently, the signal-to-noise ratio was lower for
IMJ measurements than for those at the umbo.
#57 displacements at 90 dB (SPL)
displacement [nm]
100
10
1
0.1
TM
head of malleus
0.01
100
1000
frequency [Hz]
10000
Fig. IV.4: Displacements at
the
umbo
and
mean
displacements and standard
deviations
of
ten
measurement points on the
head of the malleus. The
mean (over all frequencies)
relative difference between
the
two
frequency
responses is 16.6 dB
(min.=7.6 dB; max.=25.7
dB). The results were
gained from specimen #57.
There is no way to increase the signal-to-noise ratio other than by increasing the
stimulation intensity of the system. Since it was a goal of this study to reveal data
measured at moderate sound pressure levels this was not an option. The maximal
sound pressure level used in this study was 90 dB. Both parameters that affected
measurement accuracy and reproducibility (i.e. intensity of the reflected signal and
the signal-to-noise ratio) acted cumulatively. Since the use of silver powder increased
the effect of one parameter (intensity of the reflected signal), the overall quality of the
measurements was improved.
IV.1.3
Signal enhancement
The laser measurement system PSV-200-1 (Polytec GmbH, Waldbronn, Germany)
offered a feature for the enhancement of the reflected signal. At each measurement
point on the grid the system registered the intensity of the received signal and the
noise. The latter was compared to noise recorded at the previous point. If noise
increased, the system automatically added more averages (up to 10). Thereby the
position of the laser beam was slightly changed. According to the distance between
the laser head and the temporal bone the position was changed by 15 microns.
Within this distance from the point of the grid, the position of the laser beam was
systematically changed in order to receive a signal with less noise.
The resolution of these adjustments, however, is related to the resolution of the
measurement grid and significant deviations from the original position are prevented.
Control experiments
70
Since this leads to an increased measurement time, the benefit of this feature was
first tested in the following control experiment. The IMJ-measurement was performed
twice, once without the use of the "signal enhancement" feature and once with. In
both experiments the IMJ was covered with silver powder. As in the control
experiment IV.1.1, the consistency of the motion plane description for the y-rotation
was repeated ten times with ten arbitrary sets of 15 measurement points. The
amplitude of the transfer function Rωy was calculated and is shown in figure IV.5.
Mean values of the ten analysis procedures and their standard deviations are shown
for both measurements. There were no obvious difference between the two
frequency responses, but the standard deviations were systematically decreased by
the use of the "signal enhancement" feature. The mean (over all frequencies) relative
standard deviation was reduced from 24.5 % (±11.8 %) to 5 % (± 2.6 %). The
additional measurements, which were performed when this feature came into play,
increased the total measurement time of a scan. It was not possible to theoretically
predict the increase of time needed for a scan when the feature was enhanced, since
this depends on the sum of measurement points, at which a high noise level was
recorded. For specimen #55 measurement the time was increased by 20 %. Due to
the enormous increase in measurement quality it was decided to use the "signal
enhancement" feature for all experiments. After all main experiments were finished, it
turned out that the time limit set for the IMJ-scan (10 minutes) was not exceeded by
any of the measurements in the main experiment.
#55 Signal enhancement
amplitude
1
0.5
amplitude
0
1
without SE
0.5
0
100
with SE
without SE
1000
frequency [Hz]
10000
Fig. IV.5: (upper graph)
Amplitude of transfer function
TFωy (Rωy) and standard
deviations without the use of
the "signal enhancement" (SE)
feature.
(lower
graph)
Amplitude of transfer function
TFωy (Rωy) when the SE
feature was used during the
measurement (solid line) and
the mean values of the upper
graph (open circles). The
frequency responses of the
two measurement techniques
are similar. The standard
deviations are significantly
lower when the SE feature is
used.
The
SE
feature
therefore
increases
the
reproducibility
of
the
measurement. This control
experiment was performed in
specimen #55.
Control experiments
IV.2
71
Numbers of points analyzed
The motion plane was defined by each motion point processed by the rigid-body
motion equation. A minimal number of three points (which do not lie along the same
line) was needed to define the motion plane. Any three motion points can be
precisely described by one motion plane. If more than three motion points are
processed by the rigid-body motion equation, and if the data includes noise and
measurement artifacts, the resultant motion plain constitutes a 'best' compromise
between the motions of the involved measurement points. As mentioned in earlier,
this best compromise was calculated by the least square method (see section III.5.4
for more detailed information).
On the one hand there was the real motion plane of the incus body for example, and
on the other hand were the measurements attempting to precisely reflect the real
motion of the object. Measurement artifacts and the internal noise of the system led
to small deviations between the real motion of the object and the calculated motion
plane. When only three points were used for the analysis any noise or artifact greatly
affected the estimated of motion plane. The more points entering the rigid-body
motion equation, the more the artifacts and the noise were reduced and the better
the calculated motion plane approximated the real motion plane. Increasing the
number of considered points also increases the stability of the calculated motion
plane. It is therefore important to evaluate how many measurement points are
needed in order achieve a stable description of the motion plane. To do this, the
motion of the incus body was calculated several times using a different number of
measurement points. The description of the rigid-body motion was performed for 3, 5,
10, 15 and 20 measurement points. The points were arbitrarily selected from the 25
measurement points that remained after the procedure of measurement point
selection (see III.5.3). For each number of points (e.g. 5), the motion plane of the
incus was calculated ten times, each time using a new set of points. The mean
values and relative standard deviations were calculated for the three motion
components (vt ωx, ωy). Figure IV.6 shows the relative standard deviation for all five
measurement point sets and for all three motion components. The highest relative
standard deviations were found in the ωx-component and the lowest values in the ωycomponent. The reason for this is explained in the control experiment IV.4, which
reveals different contributions of the three motion components to the ossicular
motion. The signal to noise ratio is likely to be smallest for the component that
contributes most to the ossicular motion and vice-versa. It is evident for all three
motion components that the more points considered in the motion plane analysis, the
lower the relative standard deviations became. In other words, with increasing
numbers of points the resulting motion plane description became more stable. At low
frequencies the ωx-component demonstrated the stepwise decrease of the relative
standard deviations with the increasing number of considered points. It was required
that the relative standard deviations were below 10% in order to meet a criterion of
maximal ±1dB relative deviations. In general, 15 points were sufficient to fulfill the
condition. In the main experiments all available points (25/ossicle) were used for the
description of the motion plane of an ossicle and, therefore, the relative standard
Control experiments
72
deviations were expected to be even lower than 10%. Only in control experiments
IV.1.1 and IV.1.3 were arbitrary sets of 15 points used in the analysis, but as
mentioned before, the resulting relative standard deviations fulfilled the condition
even then.
Fig. IV.6: Number of points tested
for each of the three motion
components (Vt, ωx and ωy). The
relative standard deviations are
indicated for the five different
numbers of points (3, 5, 10, 15 and
20). The three motion components
were calculated ten times for each
point number using different sets of
points. The frequency responses
are the relative standard deviations
for each of the five point number
analyses. In general, the relative
standard deviations are highest for
the motion component ωx and
lowest for vt. As expected, for all
motion components the relative
standard deviations decrease with
increasing
point
numbers
considered in the analysis.
The relative standard deviations
reflect the stability and therewith the
reproducibility of a measurement.
15 and more points are enough in
order to keep the relative standard
deviations below 10%. In other
words, by using 15 or more
measurement points for the motion
plane evaluation, an accuracy of
±1 dB can be expected.
rel.standard deviation [%] rel. standard deviation [%] rel. Standard deviation [%]
#33 number of points
40
30
Vt
20
3
5
10
10
15
20
0
40
ωx
30
20
10
0
40
ωy
30
20
10
0
100
1000
frequency [Hz]
10000
Control experiments
IV.3
73
Undetected motion components
As mentioned in III.5.3 the IMJ-measurements were only made from a single
direction. The theoretical 6 degrees of freedom were thereby reduced to 3. The
rotation about the measurement axis (z-axis) and the translations along the x and y
axes were not detected. In this control experiment the malleus head of a single
temporal bone (# 59) was measured from all three directions, along the z, y and x
axes. The malleus head was exposed to the three measurement directions by drilling
additional channels into the temporal bone, which allowed visual access along the
three axes of the virtual coordinate system. The angle between the three
measurement axes was 90°. The three views onto the malleus head are illustrated in
figure IV.7.
Fig. IV.7: Three views on
the malleus head along
the three axes of the
coordinate system (x, y,
z).
All
middle-ear
structures and the inner
ear were preserved in this
experiment. The three
measurement axes were
aligned perpendicular to
each other. This control
experiment was made on
specimen # 59.
The three two-dimensional coordinate systems shown in figure IV.8 were aligned in
order to compose one three-dimensional coordinate system, and their x and y axes
matched those of the virtual coordinate system used for the analysis of the ossicular
motion in the IMJ-area (see III.5.1.2). The three motion components were then
evaluated for each measurement direction. Translational components were recorded
only once by the measurement, which was in line with the corresponding axis,
whereas each rotational component was registered from two measurement
directions. The six resulting motion components are shown in figure IV.9. The two
evaluated y rotations obtained from the z and x directions were almost identical
(figure IV.9 reflects the measurement along the z direction). For the other two
rotational components, x and z rotations, the calculated components differed
between the two measurement directions. The frequency response with the higher
mean (over all frequencies tested) was chosen.
Figure IV.9 reveals that all components, three translational and three rotational
components, contribute to the ossicular motion. In the upper graph, the three
Control experiments
74
translations are opposed to the reconstructed displacement of the umbo. When
translational components are projected to other positions on the same rigid body, no
lever action amplifies these displacements, hence they remain constant. Therefore,
the comparison between the three translational components and the reconstructed
umbo displacement reveals that translations play a minor role in the ossicular motion.
Fig. IV.8: LDV-measurements from the three directions (x, y, z) aligned to the virtual
coordinate system. Each of the three measurements detected another translational
motion (Tz, Tx, Ty). Each rotational component was detected by two measurements
(e.g. the x-rotation was detected by the measurement aligned with the y and z axes.
The three coordinate systems illustrated here describe a three-dimensional
coordinate system with one center of origin.
Fig. IV.9: The six motion
components obtained from
three measurements aligned
orthogonally to each other.
(upper graph) The three
translational components (Tx,
Ty, Tz) and the reconstructed umbo displacement
(U-recon) are shown. Tz and
Tx are the dominating
translational components but
they are still significantly
below the displacement of
the umbo reflected by Urecon. (lower graph) Angular
displacement of the three
rotational components (ωx,
ωy, ωz). The ωy-component
dominates
the
other
components over the entire
frequency band tested. The
experiment was performed in
specimen # 59.
#59 six motion components
displacement [nm]
100
10
1
0.1
0.01
Tx
Ty
Tz
U-recon
ang. displ. *10000 [°]
1
0.1
0.01
0.001
100
ωx
ωz
ωy
1000
frequency [Hz]
10000
Control experiments
75
The most dominant translational component (Tz) was recorded in all experiments
since it was in line with the measurement axis. Below 1.6 kHz and above 2.8 kHz the
umbo displacement exceeds the other two translational components by more than 20
decibels and between the two frequencies by more than 10 dB. The maximal angular
displacements of the three rotational components (ωx, ωy, ωz) are shown in the lower
graph. The ωy-component dominates the ωx and ωz-components over all frequencies
tested, exceeding them on average by 10 decibels. The ωx-component, which
approaches the ωy-component at 1.8 kHz was recorded in all measurements but the
ωz-component was ignored. The control experiment indicates that all motion
components contribute to the ossicular motion. In the main experiments the sole
measurement along the z-axis of the virtual coordinate system ignored the
translational components Tx and Ty and the rotational component ωz. The direction of
measurement along the z axis was chosen due to certain assumptions about middleear mechanics. The applied measurement direction is almost in line with the direction
of action of the stapes piston-like motion. Even if the rocking motion of the stapes,
which is caused by non-translational motions of the LPI, increases at higher
frequencies, its relevance as an effective stimulus for the inner ear is not approved.
Translation of the stapes necessarily causes a volume displacement of the cochlear
fluid between the oval and the round window. This is different with rocking motions of
the stapes about a rotational axis within the stapes footplate: When one part of the
footplate is pushed inward and displaces cochlear fluid the other part of the footplate
is drawn outward and partly compensates for the volume displacement. The
compensated fluid volume is therewith not transferred to the round window and
probably does not initiate a traveling wave. Since none of the three motion
components acts in line with the piston-like motion of the stapes, and due to the fact
that the rotational ωz-component clearly undershoots the dominant ωy-component,
this justifies that these components were not considered in this study.
IV.4
Motion component contribution
Three motion components were recorded in the main experiment, Tz, ωx and ωy (the
sole translational component 'Tz' was also named vt). Their contribution to the
ossicular motion was evaluated in the following control experiment. The idea was to
reconstruct the displacement of the umbo and the LPI as described in III.5.6. Besides
the reconstruction regarding all three registered motion components (vt, ωx, ωy), the
two structures were also reconstructed three times, each time regarding one single
motion component. In other words, each motion component was projected on the
coordinates of the corresponding structure (umbo or LPI). Their contribution to the
completely reconstructed displacement was not straightforward since the three
motion components interacted in a constructive and destructive manner (see III.5.3).
In figure IV.10 the four displacement reconstructions are given for the umbo and the
LPI. It is prominent how only one component, the rotational component ωy,
approximates the complete reconstruction best by far and almost overlaps the latter.
For the umbo the differences between the complete reconstruction and the ωy
component averages at 0.7 dB (± 0.5 dB) and at 1.5 dB (± 1 dB) for the LPI.
Control experiments
76
Especially for the malleus, the ωy-component dominates the other two components
significantly and exceeds the next highest component in average (over all
frequencies tested) by 20 dB (± 3.7 dB). For the incus the three components are
more balanced but the ωy-component still dominates over all frequencies tested and
exceeds the next highest component in average by 13 dB (± 5.3 dB).
A fifth curve in figure IV.10 shows the calculated difference between the completely
reconstructed displacement of the umbo or the LPI (all, dotted curve) and the
reconstruction based solely on the dominant ωy-component. It turns out that this
difference has a similar dimension as the two remaining components. It is neither the
addition of both remaining components nor does it overlap one of the two precisely.
As mentioned earlier (see section III.5.2), the three components interact in a
constructive and deconstructive way as sound superimposed sound waves do.
Although competition between the three motion components occurs, the contribution
of the ωy-component to the ossicular vibration is larger by several orders and is,
therefore, always the dominant motion component of the ossicular vibration.
Fig. IV.10: Three partial (Vt,
ωx, ωy) and one complete
(all) displacement reconstruction of the umbo (upper
umbo
graph) and of the LPI
displacement (lower graph).
For both ossicles (malleus
and incus) the rotational
component ωy matches the
displacement of the complete
reconstruction very well. The
two frequency responses
almost overlap. For the incus
the relative contribution of
the other two components
LPI
(Vt, ωx) is larger than for the
malleus. The crosses show
the difference between the
complete reconstruction and
the rotational component ωy.
The dimension of this
difference is close to that of
components Vt and ωx. The
experiment
was
10000 control
performed in specimen # 57.
#57 displacement reconstructions
of the umbo and the LPI
displacement [nm]
1000
100
10
1
0.1
aall
ll
Vt
Vt
ωx
wx
ωy
wy
diff
diff
0.01
displacement [nm]
100
10
1
0.1
0.01
100
1000
frequency [Hz]
Control experiments
IV.5
77
Coherence of joint and ossicular transmission
In the previous control experiment, it was demonstrated that the ωy-component plays
a major role in the ossicular motion. There is another way to verify these findings
which is part of this control experiment. Furthermore it would be interesting to test
whether the dominant component (ωy) is reflected by the middle-ear transfer function.
The question, regarding what relationship exists between the transfer function
deduced from the descriptions of the motion plane by the three motion components
and the transfer function of the middle ear, is addressed here. In other words, are the
characteristics of the transfer function found in the IMJ also reflected in the middleear transfer function of the "entire" ossicular chain? Again, the term "middle-ear
transfer function" as it is used in here implies the transfer function between the umbo
and the LPI (TFi/u). The transfer function between the umbo and the stapes footplate
could not be measured, and the incudo-stapedial joint and stapes were not included
in the present study.
The transfer function of the middle ear TFi/u
was evaluated. Displacements of the umbo
and the LPI were not reconstructed in this
experiment but laterally measured through
the AEEC. Access to the LPI was attained
by a small perforation (diameter < 1 mm) in
the TM. A periodic chirp served as acoustic
stimulus for these measurements on the
umbo and LPI. The area of the IMJ was
scanned using a flat multi-sine stimulus at
90 dB (SPL). Figure IV.11 depicts a
schematic illustration of the three
measurements.
The amplitude of the TF (Rvt, Rωx, Rωy) and
its phase (Phvt, Phωx, Phωy) were
evaluated for each motion component at
the IMJ. Amplitudes of transfer functions at
Fig. IV.11: Schematic illustration of
the IMJ (Rvt, Rωx, Rωy) were evaluated by
control
experiment IV.5. Transfer
dividing
the
maximal
angular
or
functions
were evaluated either
translational displacement of one of the
based on laterally performed
three motion components of the incus by
measurements on the umbo and
the corresponding maximal displacement of
LPI or on the three motion
the malleus. The transfer function between
components acquired by the IMJthe umbo and the LPI (TFi/u) was given by
measurement. The transfer function
the amplitude Ri/u and its phase Phi/u.
reveals the ratio between the
Again, Ri/u was evaluated by dividing the
malleal and incudal motions.
maximal measured displacement of the LPI
Access to the LPI was attained
through a small (<1mm) perforation
by the maximal displacement of the umbo.
in the TM.
In figure IV.12 (upper graph), Ri/u is
compared to the amplitudes of the three
Control experiments
78
motion components Rvt, Rωx and Rωy. At frequencies below 2 kHz, Ri/u is very well
approximated by Rωx and Rωy. The dip of Ri/u at 2.4 kHz is represented in Rvt but
not in Rωx and Rωy. Above 2.6 kHz Rωy reproduces Ri/u best. The phases of the
transfer functions are depicted in figure IV.12 (lower graph). Except for the frequency
range between 2.0 and 2.6 kHz and frequencies above 7 kHz, Phωy is almost
concurrent with Phi/u, whereas Phωx and Phωy deviate notably from Phi/u. The
amplitudes of the transfer functions contain only relative information and do not
indicate how much a component is contributing to the ossicular motion. The phase of
the overall transfer function should approximate the phase of the dominant
component. Since the ωy-component approximates the transfer function between the
umbo and the LPI best by amplitude and phase this is a good indication that the ωycomponent not only dominates the ossicular motion, but that the characteristics of its
transfer function reflects the characteristics of the middle-ear transfer function.
#21 transfer functions
1.0
amplitude
0.8
0.6
0.4
TF-I/U
TF-Vt
0.2
TF-ωx
TF-ωy
0.0
200
100
phase [°]
0
-100
-200
-300
-400
-500
-600
100
1000
frequency [Hz]
IV.6
Fig. IV.12: Four transfer
functions based on either one
of
the
three
motion
components at the IMJ (vt, ωx,
ωy) or on the displacement
measurement on the umbo
and LPI. (upper graph) For
each transfer function the
amplitudes were evaluated by
dividing
the
maximal
displacement of the incus by
the maximal displacement of
the malleus. (lower graph) The
phases reflect the phase
differences
between
the
malleal- and incudal motion.
For both, amplitude and
phase, the transfer function of
the
ωy-component
approximates the middle-ear
transfer function best. The
experiment was performed in
10000 specimen # 21.
How representative are IMJ-measurements?
Measuring the umbo velocity through the external ear canal is a generally used and
broadly accepted technique to obtain a reference measurement. How well
measurements on the IMJ correspond with umbo velocity measurements was
evaluated in this control experiment. The experiment required the removal of parts of
the inner ear. Nevertheless, the conclusions obtained from it can be applied to
Control experiments
79
experiments with the inner ear intact with no restrictions. Firstly, the MEC was
opened, prepared for an IMJ measurement and the temporal bone was positioned for
the latter. The measurement grid was defined. Then, the temporal bone was removed
from the setup and parts of the semicircular canals and the cochlea were drilled away
until visual access to the umbo and LPI was achieved. The temporal bone was again
mounted on the goniometer and precisely realigned to the prepared measurement
grid. The removal of parts of the inner ear provided a view on the entire ossicular
chain, but the viewing angle was the same as during an IMJ measurement where the
inner ear is still intact. The IMJ measurement was now performed using the multi sine
signal at 90 dB (SPL). From the same viewing angle a second measurement was
made on the umbo and LPI. The temporal bone was turned and the umbo velocity
was measured laterally through the AEEC under the same conditions.
This procedure allows the achievement of three different types of umbo
displacements:
1. U-lat: laterally measured umbo displacement (measured through the AEEC)
2. U-med: medially measured umbo displacement (measured from the same
viewing angle as IMJ measurements)
3. U-recon: reconstructed umbo displacement based on the IMJ measurement
and the x and y.coordinates of the umbo
The three types of measurements are schematically illustrated in figure IV.13. The
first two types of umbo displacements (U-lat and U-med) were directly measured on
the corresponding structure (umbo). The third umbo displacement mentioned (Urecon) was based on measurements on the IMJ and were reconstructed for a
structure outside the measurement grid (umbo). The technique used for this
reconstruction is described in detail in chapters III.5.1.4 and III.5.5.The main
questions addressed in this control experiment are:
1. How precise are IMJ-measurements and the analysis technique used to
reconstruct the dynamic behavior of the ossicular motion?
2. How well do IMJ-measurements predict umbo displacement measurements
performed from the lateral side as performed in many previous studies?
The first question is answered by comparing the directly measured umbo
displacement from the medial side (U-med) with the reconstructed umbo
displacement (U-recon). When these two displacements overlap the IMJmeasurement as well as the reconstruction technique for hidden structures are
accurate and deliver reliable results. This is because errors in the description of the
motion plane of the malleus head and the reconstruction technique applied in order
to calculate the displacement of the umbo add. The second question is answered by
comparing the information gathered by the IMJ-scan and an umbo measurement,
which is often used as a baseline measurement in middle-ear investigations (U-lat).
U-recon reflects the data obtained by the IMJ-measurement and is therefore
compared with the measured umbo displacement U-lat. Both measurements were
Control experiments
80
performed from a fixed position but the dynamic behavior of the umbo is complex and
changes its modes with frequency. The motion of the umbo does not follow one
single axis but describes a very complex motion pattern at higher frequencies
(Decraemer et al., 1991; Decraemer & Khanna, 1994). Since the two measurements
(U-recon, U-lat) are not in line, but diverge by about 20°, they will only overlap by
chance. Both of them capture a certain portion of the real umbo displacement.
Fig. IV.13: Umbo displacements achieved by
three different techniques. The IMJ-scan and
umbo measurement U-med were measured
medially through the middle cranial fossa,
whereas U-lat was performed from the lateral
side through the AEEC. U-lat and U-med were
direct measurements on the structure of interest
(umbo). U-recon was based on the IMJ-scan
and reconstructed by applying the coordinates
of the umbo (see IV.5.1.4 and IV.5.5). The
measurement axes of U-lat and U-med
diverged by an angle of roughly 20°.
At least an idea can be obtained on how well the two measurements correspond and
whether it is reasonable to compare results obtained from IMJ-measurements with
results obtained from umbo measurements performed from the lateral side. The two
measured (U-lat, U-med) and the reconstructed (U-recon) umbo displacements are
shown in figure IV.14. The differences in displacement between U-recon and U-med
average at 1.4 dB (± 1.6) and at 2.3 dB (± 1.2) between the U-med and the U-lat (dBdeviations are given with reference to U-med). The mean difference between Urecon and the U-lat is 2.9 dB (± 1.3) (dB-deviations are given with reference to Urecon). The small differences between U-med and U-recon (especially below 6 kHz)
demonstrated the accuracy of the IMJ-measurements and the analyzing technique.
Above 7 kHz U-recon exceeds the two measured umbo displacements, U-lat and Umed. A reason for this was not found, but the fact was considered when data
obtained from reconstructed umbo displacements was interpreted. U-lat and U-med
measurements were not aligned in parallel, but their measurement planes differ by
about 20 degrees, resulting in differences in the displacement portion captured by
each measurement. In this case, the differences between the captured portions of
the two measurements decreased continuously with frequency. Below 4 kHz the
deviations averaged 3.1 dB (± 0.5dB) while above 4 kHz, U-med and U-lat almost
overlapped and their differences averaged 1.0 dB (± 0.6dB). In spite of some
increasing deviations at higher frequencies (≥ 7 kHz) it can be generally stated that
umbo velocity measurements from the medial side represent very well the dynamic
characteristics usually measured from the lateral side. Furthermore, the IMJ
Control experiments
81
measurement, the analysis and reconstruction technique appear accurate enough to
provide reliable descriptions of the dynamic behavior of the ossicular chain.
#33 three types of umbo displacements
displacement [nm]
1000
100
Ulat
Umed
Urecon
10
1
100
1000
Fig. IV.14: Umbo displacements achieved by three
different techniques. U-lat
was
measured
laterally
through the AEEC, whereas
U-med
was
measured
medially through the medial
cranial fossa, from the same
direction from where IMJscans were performed. The
control
experiment
was
performed in specimen # 33.
10000
frequency [Hz]
IV.7
Insights from control experiments
These control experiments generally support the fact that the techniques applied in
the main experiments yield reproducible and accurate results. The tools used to
increase the quality and reproducibility of the measurements do not affect the
characteristics of the mechanical system in a significant way.
It is possible to accurately calculate the middle-ear transfer function based on
displacement reconstructions of structures (umbo, LPI), which are not accessible
during the measurement. This allows the evaluation of parts of the middle-ear
transfer function in the intact ear.
Although some motion components were ignored due to a single measurement
direction, the dominant motion components of the ossicular vibration were recorded.
The criticism that not all motion components are detected by the applied
measurement technique is justifiable. The goal of the study is the characterization of
the IMJ-dynamics, the relative motions between the malleus and incus and its
consequences for middle-ear transmission.
The "hypermobility of the incudo-stapedial joint" (Miller & Keith, 1979) suggests, that
non-translational movements of the LPI experience large transmission losses when
transferred to the spates head. The gliding of this joint is important in order for the
stapes to be efficiently displaced by the action of the stapedial muscle. This is
different for translational motions, since the two cartilaginous faces of the incudostapedial joint do not glide on each other, but are compressed during the incursion of
the LPI. Therefore, translations of the LPI are likely to be transmitted more efficiently
than non-translations.
82
Chapter V
V
Results
This chapter is structured as follows:
First, the dynamic behavior of the umbo is described. The question addressed is
whether or not the umbo motion is symmetrical and linear. Second, the ossicular
motion of malleus and incus is qualitatively and quantitatively described. It is shown
how the dynamic behavior of the ossicular chain changes with frequency. On the
basis of the quantitative description of the ossicular motion the relative motion
between malleus and incus was evaluated next, and the transmission properties of
the IMJ characterized.
The term "transmission" is often used in this chapter and three different types of
transmissions (or transfer functions) must be distinguished. First, there is the joint
transmission, which is defined by the motion transferred from the head of the malleus
to the body of the incus. Three motion components, one translational and two
rotational, contribute to the joint transmission. Second, the ossicular transmission is
defined by the motion transferred from the umbo to the end of the long process of the
incus, the LPI. In addition to the joint transmission, the ossicular transmission
includes also the three dimensional anatomy and the motion modes of the two
ossicles, the malleus and incus. Since measurements on the stapes were not
possible in these experiments, the ossicular transmission does not describe the
entire ossicular transmission including all three middle-ear ossicles. Since the incudostapedial joint constitutes another potentially elastic element in the line of the three
ossicles, the entire ossicular transmission can not be described fully by the
Results
83
measurement technique applied in the present study. The third type of transmission
is given by the velocity of the LPI with reference to a sound pressure level of 90 dB at
the TM. Although the measure remains a velocity (m/s), it is called here the sound
transmission. Since the operating area of the incudo-stapedial joint, the structure that
the LPI exerts force on, is frequency independent, and the measure (velocity) is
normalized to a constant sound pressure, the term sound transmission is legitimate.
One of the aims of this study was to decompose the middle-ear transmission into the
three above mentioned transmission components. The evaluation of the joint
transmission reveals the contribution of the joint to the transmission characteristics of
the middle ear. The ossicular transmission also contains the contribution of the three
dimensional anatomy of the incudo-malleolar complex and its motion modes, and
might reveal possible advantages of the three ossicle middle ear that is a mammalian
attribute. The sound transmission shows the efficiency of the middle ear in
transmitting sound from the external ear canal to the inner ear, which was probably
the driving force in the evolution of the middle ear. The characterization of these
three transmission subtypes and their correlations constitute the main portion of this
chapter.
The effect of the IMJ in middle-ear function was also ascertained by comparing
transmission before and after fixation of the IMJ. The sound transmission gain
achieved by fixing the joint should equal the sound transmission loss caused by the
joint mobility. The joint transmission was used to classify the quality of the IMJfixation, and the effects of the IMJ-fixation were evaluated for the ossicular as well as
for the sound transmission.
Finally, since parameters like age and gender of the donors and post mortem time
varied among the specimens, the data of the 27 specimens were analyzed for
possible correlations with these parameters.
One difficulty when investigating the dynamics of a complex mechanical system like
the middle ear is the weighting of an individual result. The multitude of parameters
defining the mechanical properties of middle ears is huge and identifying the cause
for inter individual differences is impossible in most cases. In order to comprehend
the mechanisms of such a complex system, its characteristics must be analyzed in
detail and separately for each individual. Potential outliers of an individual frequency
response may become reasonable data when all characteristics of this individual
system have been considered. This depth of information vanishes when the data is
averaged over all individuals. Therefore, most aspects of this study are investigated
with observations of individual results, and then the generality of these results is
investigated by comparing to other specimens and group means.
Due to anatomical peculiarities the results of two temporal bones are not shown in
this chapter. In specimen #56 about 75% of the TM area was sclerotized. The
frequency response of the umbo at low frequencies revealed significantly lower
displacements (about -40 dB below 1 kHz) compared to the mean frequency
response of the other 27 specimens. The specimen constitutes an interesting case
but the results will be reported elsewhere. Specimen #46 had a floppy TM that
protruded into the MEC and, therefore, the measurements performed in this
specimen were not analyzed.
Results
84
V.1
Dynamics of the umbo
V.1.1
Symmetry of umbo displacement
In the first half of the 20th century some studies presented evidence for an
asymmetric motion of the umbo (Dahmann 1930, Stuhlman 1937) during acoustic
stimulation. Asymmetry between the excursion and the incursion of the umbo
following static air pressure variations was already described earlier by Helmholtz
(1868), but if this was also true for dynamic stimuli the middle ear would work in a
nonlinear way during sound transmission.
For this experiment the output of the laser Doppler vibrometer was directly monitored
by an oscilloscope. The voltage of the output signal is proportional to the measured
velocity. The experiment was performed in five temporal bones with an intact inner
ear and a closed but pressure equalized MEC. The umbo velocity was monitored at
six discrete frequencies (0.5, 1, 2, 5, 8 and 10kHz) at sound pressure levels from 70
to 120 dB (in 10dB steps). Ten continuous cycles were selected and the mean value
of their positive and negative peaks were evaluated (Fig. V.1). If the absolute values
of the peaks are similar the umbo displacement can be considered to be
symmetrical. In order to calibrate the zero position of the oscilloscope to the zero
displacement of the umbo, the sound stimulation was lowered until the voltage
response approximated a flat line. The flat line was then set to zero and for the
measurement the sound pressure level was again increased to the preferred value.
The umbo now oscillates about the zero position of the oscilloscope and positive and
negative values reveal the deviation from the zero position of the umbo. In the
example illustrated in figure V.1 the umbo displacement is symmetrical and the
excursion and incursion of the umbo show similar peak values.
#57 ubmo displacement at 90 dB
displacement [nm]
80
+
60
40
20
0
-20
-40
-60
-
-80
0
0.005
0.01
time [s]
0.015
Fig. V.1: Displacement of the
umbo at 90 dB (SPL) at a
frequency of 0.5 kHz shown in
the time domain. On the basis
of ten cycles the positive
(+arrow) and negative (-arrow)
peak values of the time course
were averaged. This was done
for discrete frequencies at 0.5,
1, 2, 5, 8 and 10 kHz. Positive
displacements correspond to
umbo excursions and negative
0.02 displacements to incursions.
Shown for specimen #57.
Relative standard deviations for the positive peaks equaled 2.2%, 2.1% for the
negative peaks and did not exceed 18.5% for any of the measurements performed at
the aforementioned frequencies and intensities. The relative differences (in decibels)
Results
85
between the mean absolute values of the positive and negative peaks of the
displacements equaled 0.16 dB for the illustrated example and did not exceed the
value of 2.1 dB for any of the measurements. As expected, the relative standard
deviation within a set of 10 peaks (positive or negative) as well as between the mean
positive and negative peaks increased with decreasing sound pressure level at all 6
frequencies tested. Stability and reproducibility of any measurement which includes
noise and measurement artifacts decreases with the amplitude of the detected
signal. At higher frequencies where displacements are smaller compared to lower
frequencies the mentioned standard deviations are also larger than at lower
frequencies. However, independent of sound pressure (70dB ≤ SPL ≤ 120dB) and
frequency (0.5 kHz ≤ f ≤ 10 kHz) there was no systematic difference between the
excursion and the incursion of the umbo.
In figure V.2 six umbo displacements are illustrated in the time domain for sound
pressure levels of 70, 80, 90, 100, 110, and 120 dB and a frequency of 3 kHz. The
excursions and incursion are symmetrical. At low sound pressure levels (80 and 70
dB) the signal becomes noisy and measurements need to be averaged in order to
produce reasonable results.
#57 symmetry of umbo displacement at 3 kHz
displacement [nm]
400
10
90dB
300
120dB
200
100
0
5
80dB
110dB
0
100dB
70dB
-100
-5
-200
-300
-10
-400
0.3
0.5
0.7
time [ms]
0.9
0.4
0.6
0.8
1.0
time [ms]
Fig. V.2: Umbo displacements at 3 kHz measured in specimen #57. The
displacements are shown for sound pressure levels of 70, 80, 90, 100, 110 and 120
dB. This data was not computed but directly recorded by an oscilloscope. No
averages were made and the six traces have been extracted from the immediate
time signals.
Results
V.1.2
86
Linearity of umbo displacement
An asymmetric oscillation is not a necessary prerequisite for the induction of
nonlinear behavior. For the verification of linearity of the system within the borders of
the experimental conditions applied (range of SPL and frequency band) the umbo
displacement was monitored at several sound pressure levels. Figure V.3 shows the
umbo displacement measured in specimen #45 excited by the multi-sine signal at
sound pressure levels between 50 and 90 dB (in 10 dB steps). The presented
example shows umbo displacements in the closed MEC condition. The noise floor
was measured using no acoustic signal.
#45 umbo displacement (closed MEC)
displacement [nm]
100
10
1
0.1
90dB
80dB
70dB
60dB
50dB
resolution
0.01
noise
noise
0.001
100
1000
frequency [Hz]
10000
Fig. V.3: Umbo displacement excited by a multisine signal at sound
pressure levels between
50 and 90 dB. The black
dots indicate the noise
floor of the displacement
measurement (no acoustic
signal) and the straight
solid line represents the
resolution of the scanning
laser Doppler vibrometer
which is at 0.3 µm/s. (data
shown for specimen #45)
The straight solid line indicates the sensitivity limit of the scanning laser Doppler
vibrometer which is 0.3 µm/s. Reliable velocities measurements below that limit are
not possible. Since the system measures velocity, the maximal displacement
sensitivity decreases with frequency. This avails umbo displacement measurements
at relatively low sound pressure levels (50 dB) because umbo displacement also
decreases with frequency and the high frequencies are not cut off by the sensitivity
limit of the system. Stimulus levels lower than 50 dB SPL would produce
displacements that are obscured by the noise floor.
The frequency responses of the umbo displacements at the various sound pressure
levels are similar in shape and they appear to be regularly separated by the same
value (10 dB). In figure V.4 the umbo displacements of figure V.3 are charted
against the sound pressure level. Each curve represents one of the 41 tested
frequencies. The thick line indicates the linear displacement course calculated
downwards from a 10 nm displacement at 90 dB (SPL). The intensity responses of all
frequencies are parallel to this line. In the lower graph of figure V.4 the
displacements at all frequencies are normalized in order to a displacement of 10 nm
at 90dB (SPL). After this normalization the displacement at all test frequencies merge
to one point (10 nm) at 90 dB SPL. The single linear response was estimated
Results
87
downwards form this point and is indicated by a straight line. If the umbo behaves in
a linear way the displacements at the other (lower) sound pressure levels should be
in line with the linear course. Normalized displacements are represented by closed
circles (41 data points at each sound pressure level) and their mean values by large
open circles.
#45 linearity of umbo displacement
displacement [nm]
100
10
1
0.1
0.01
displacement [nm]
100
10
1
0.1
0.01
40
50
60
70
80
90
100
Fig. V.4: The data of figure
V.3 is charted versus sound
pressure
level.
(upper
graph) Each line represents
one of the 41 frequencies of
the multi-sine signal. The
thick line indicates the
linear displacement calculated downwards from a 10
nm displacement at 90 dB
(SPL). (lower graph) The
displacements for all 41
frequencies were normalized to a 10 nm displacement at 90 dB (SPL). The
straight line is equivalent to
the thick line of the upper
graph. The black dots show
normalized displacements
for all frequencies and the
open circles their mean at
the corresponding sound
pressure level. The results
of specimen #45 are shown
here.
sound pressure level [dB]
Mean (averaged over all frequencies) normalized displacements were evaluated in
seven temporal bones (#45, 48, 49, 50, 53, 57, 59) and are shown in figure V.5. The
mean values are very well in line with the linear response. At the lowest tested sound
pressure level (50 dB) the deviations from the linear course are slightly larger than at
higher sound pressure levels. This is likely to be due to the lower signal to noise ratio
at the lowest sound pressure level. The data are evenly distributed about the linear
projection.
Although contradictory to the mean values illustrated in figure V.5 in some
specimens and more often at higher frequencies, umbo displacements were below
the linear course at 50 dB (SPL). This again might be due to measurement artifacts
since the displacements measured at the high frequencies are the lowest in the
frequency response and therefore more likely to produce measurement errors due to
Results
88
the low signal to noise ratio. However, within the range of sound pressure levels
used for the measurements at the IMJ (70-90 dB) the umbo behaves linearly.
linearity of normalized umbo displacements
norm. displacement [nm]
100
closed MEC
open MEC
10
1
0.1
0.01
40
50
60
70
80
90
sound pressure level [dB]
100 40
50
60
70
80
90
100
sound pressure level [dB]
Fig. V.5: Normalized umbo displacements with open (left graph) and closed (right
graph) middle-ear cavity (MEC). Each of the seven temporal bones is represented by
the mean normalized umbo displacements (closed circles). The line indicates the
linear displacement course calculated downwards from a 10 nm displacement at 90
dB SPL. Only the data of specimens #45, 48, 49, 50, 53, 57 and 59 were analyzed
because measurements at all sound pressure levels (50-90 dB) in the closed and
open MEC were only obtained in these seven specimens. The multi-sine signal
served as acoustic stimulus. This means that all 41 frequencies are contained in this
figure.
V.1.3
Baseline measurement
In order to allow for comparison between the dynamic characteristics of the temporal
bones used in this study and the data published by other researchers the umbo
displacement was measured from the lateral side through the AEEC. At the stage of
the experiment when a baseline measurement was made the MEC was still closed.
Possible static air pressure differences between the MEC and the ambient air were
equalized by a small opening into the MEC (through the medial cranial fossa) which
was sealed immediately before the measurement. The umbo displacement was
measured during the stimulation with the multi-sine signal at 90 dB SPL. Figure V.6
shows the umbo displacements acquired in 14 temporal bones. Although there are
large variations between the umbo displacements among the various temporal
bones, a general pattern is evident. In all temporal bones tested, two prominent
displacement peaks were found, one between 0.6 and 1.0 kHz and the other
Results
89
between 2.8 and 4.8 kHz. In 10 out of 14 temporal bones an obvious notch was
observed between the two peak displacements (between 1.7 and 2.7 kHz). The
second peak and the notch are still reflected by the mean frequency response (lower
graph) of all 14 temporal bones but the scattering of the data leads to flattening.
Below ~0.8 kHz the umbo displacement seems frequency independent (Fig. V.6
upper graph) whereas between 1 and 4 kHz the displacement roll-off equals -8.5
dB/octave.
Umbo displacements (closed MEC)
displacement [nm]
100
p1
p2
10
n
1
0.1
displacement [nm]
100
p2
10
n
n=14
1
0.1
100
1000
Fig. V.6: Umbo displacements (peak to peak) in 14
temporal
bones.
(upper
graph) Individual frequency
responses
of
the
14
considered temporal bones.
In
all
specimens
the
frequency response showed
two displacement peaks, one
between 0.6 and 1 kHz (p1)
the other between 2.8 and
4.4 kHz (p2). Most of the
specimens (10 out of 14)
showed a notch between 1.7
and 2.7 kHz (n). (lower
graph)
Mean
umbo
displacement with standard
deviations. The first peak is
obscured in the mean
frequency response whereas
the second peak (p2) and
the notch (n) can still be
recognized.
The
values
represent the zero to peak
10000 displacement.
frequency [Hz]
V.1.4
Opening of MEC
By opening the MEC the acoustic properties of the middle ear were changed.
Assuming that the principle of a "Helmholtz resonator" applies to the middle ear the
volume of the MEC affects the acoustic characteristic of the middle ear. Volume and
medium compressibility are related and besides the material properties and shape of
the TM it defines the compliance of the TM. On the one hand, opening of the MEC
leads to an increase of the cavity volume and therefore to an increase of TM
compliance. The compressibility of a medium is expressed by its stiffness. Since low
Results
90
frequencies are more affected by stiffness changes than high frequencies, opening of
the MEC is supposed to increase the compliance of the system at low frequencies.
On the other hand, the resonance of the "Helmholtz resonator" is supposed to be
shifted to lower frequencies. Figure V.7 shows the mean frequency responses of the
umbo displacements of the same 14 specimens which were considered in figure V.6
for both, the closed and the open MEC condition.
For the sake of clarity the mean values and their standard deviations are alternatively
shown for the closed and the open MEC condition. A slight increase of the umbo
displacement after opening of the MEC appeared in the low frequencies (0.5 to 1.2
kHz). The second peak which was observed under the closed MEC condition
disappeared by the opening of the MEC with a decrease of the frequency response
above 2.8 kHz. Regarding each specimen individually, the effects of MEC opening
were multifaceted. In 6 out of 14 specimens the compliance at low frequencies was
increased. Only in 7 specimens the loss of the second displacement peak was
observed and in 11 specimens the displacements in the high frequencies were
decreased. Therefore no general statement can be made based on the acquired
data.
open & closed MEC
displacement [nm]
100
#54
10
n
1
0.1
displacement [nm]
100
n=14
10
1
open
closed
0.1
100
1000
frequency [Hz]
10000
Fig.
V7:
Mean
umbo
displacements under closed
and open MEC condition for
specimen #54 (upper graph)
and for the 14 specimens
(lower graph) which were
considered in figure V.6.
With the opening of the
MEC, displacements at low
frequencies (< 1 kHz) tend to
increase. The notch (n)
which was observed in most
specimens (see Fig. V.6),
and is found at 2.2 kHz in
specimen #54 disappeared
in all specimens by opening
the MEC.
At higher
frequent-cies, umbo displacements were lowered in
11 out of 14. Effects of MEC
opening
varied
greatly
between specimens and the
mean values obscure details
which are provided by a
single
specimen
(upper
graph).
Results
V.2
91
Ossicular motion
This section is an attempt to qualitatively and quantitatively describe the complex
motion of the ossicular chain. On the one hand, it is necessary to get an idea how a
complex motion occurring in the ossicular chain might look, and, on the other hand,
quantitative data is important for the analysis and interpretation of those
observations. Looking at the computed animation of a scanned area gives one a very
precise idea of the dynamic behavior of the middle-ear ossicles. But the only way to
quantify a complex motion is to split it up into its possible motion components (three
in this study) and to describe them separately. The cost of this latter approach is that
the gestalt of the motion pattern vanishes into bare numbers. Therefore great
importance was attached to the combination of both, the qualitative and quantitative
approach.
It is not possible to present a detailed analysis for each temporal bone measured in
this study. Therefore the qualitative description is only shown for one temporal bone
(#54), the right ear of a 56 year old woman. The temporal bone was chosen due to
size of the MEC which allowed an optimal angle of incidence (almost perpendicular
to the plane of the body of the incus) onto the IMJ area. It further showed no obvious
anatomical abnormality and the measurement points of the IMJ-scan showed the
best coherences among the tested specimens. The data of the same temporal bone
was used for a detailed presentation of the quantitative results (see V.2.2). Thus the
reader is invited to compare the qualitative and quantitative approach and to
associate them with each other. In addition, some parameters are shown for all
temporal bones tested in order to yield some characteristics of the ossicular motion
pattern that can be generalized.
V.2.1
Qualitative approach
As mentioned earlier, the animation of a complex motion with moving pictures allows
the viewer to immediately visualize the dynamic process. Describing a complex
motion based on still pictures is much more difficult. Difficult, because the
interpretation of color coded iso-displacement-lines, which probably constitute the
most intuitive illustration of a dynamic motion, becomes difficult when several motion
components interact. Therefore, in figure V.8, besides the iso-displacement-lines,
the main motion components are schematically depicted by rotation and translation
axes. The positions of these axes are somewhat arbitrary. Any dynamic behavior of
the IMJ can be described by the three motion components regardless of the position
and orientation of their axes. In other words, the three axis of motion (two rotations
and one translation), at a fixed position and orientation, can reproduce any dynamic
behavior of the ossicular motion by fitting the parameters such as the amplitude and
the phase difference between each motion component. The only precondition is that
the translational axis is in line with the measurement axis.
In figure V.8 the motion axes indicated are free of any fixed coordinate system and
were evaluated by observing the animation of the ossicles at each frequency chosen
and by looking at the maximal displacement pattern (iso-displacement-lines). At low
Results
92
frequencies at which the dynamic behavior of the ossicular chain can be generally
described by a single rotation about one axis, the position and orientation of this axis
was set by the course of the valley in the iso-displacement profile. At higher
frequencies (above 2 kHz) the motion modes became more complex and the motion
axes were mainly placed based on the observation of the dynamic behavior in the
animation mode. The frequencies at which the dynamics of the ossicular chain are
qualitatively illustrated in figure V.8 were selected due to their clear and prominent
motion pattern at these frequencies (0.5, 0.9, 1.3, 1.7, 3, 5.3, 6 and 10 kHz). For
each frequency selected, the iso-displacement-lines and the main motion
components are illustrated. The first picture shows the scale and the orientation of
the ossicles. In addition, three middle-ear ligaments, the posterior incudal- (PIL), the
superior- (SML) and the anterior malleal ligament (AML), are highlighted (orange
areas). The two red dots indicate the center of mass for malleus (M) and incus (I) as
evaluated by Kirikae (1960). Outlines of both, malleus and incus are accentuated in
all nine pictures.
Up to 1.3 kHz, the motion pattern of the incudo-malleolar complex can be described
by a single axis of rotation. At 0.5 and 0.9 kHz this axis runs between the PIL and the
AML. The values of the iso-displacement-lines reach zero at the center of the rotation
which indicates that translation is negligible. The AML as an anchor for the rotational
axis becomes less important towards higher frequencies. At 1.3 kHz, both ossicles
still have a common rotational axis but for the malleus the center of rotation has
slightly moved towards the umbo. Between 1.3 and 2.0 kHz, a common motion
pattern of both ossicles is still clearly visible but a precise analysis reveals that the
orientations of the rotational axes, which were still in line for both ossicles at lower
frequencies, start to diverge. Above 2.0 kHz, the common axis of rotation completely
disappears. At 3.0, 5.3 and 6.0 kHz, the motion pattern of the incus looks very
similar. The smallest displacements occur close to the center of mass and the isodisplacement-lines are arranged in circles around this point. The displacement at this
center is very small at 90 dB SPL (0.14 nm at 3.0 kHz; 0.09 pm at 5.3 kHz; 0.016 pm
at 6.0 kHz). The axis of rotation is rotating about this center; that is to say during one
cycle the axis of rotation rotates about this center by 360° while it performs one
oscillation cycle. Thereby the body of the incus rocks counterclockwise around the
center where the displacement is minimal. The motion pattern of the malleus is
dominated by one rotational axis throughout all frequencies tested. It is driven by the
oscillation of the umbo. Except for the example given at 1.7 kHz, the rotational axis
passes through the head of the malleus and is more or less parallel to the initial axis
of rotation at low frequencies (0.5 - 1.3 kHz). At some frequencies (3.0 and 10 kHz),
a second, less prominent rotational axis, which is aligned more or less in parallel with
the manubrium, comes into play. Above 7.0 kHz the circular center of minimal
displacement of the incus disappears and a prominent translation comes into play. A
rotational axis that performs a translation as indicated in figure V.8 at 10 kHz best
reflects the motion pattern at the highest frequencies tested.
This analysis suggests that a simple motion pattern common of both ossicles occurs
only at low frequencies (< 1.3 kHz). At these low frequencies, the two suspending
ligaments, the PIL and the AML, seem to play a crucial role. As frequency increases,
Results
93
this pattern A prominent motion pattern of the incus that extends over a relatively
large band of frequencies (3.0 - 7.0 kHz) shows a circular center of minimal
displacement which is located close to the breaks up into complex and partly
independent motions of the two ossicles.. center of mass of the incus (described by
Kirikae, 1960).
Fig. V.8: Qualitative description of the ossicular motion for specimen #54. The top left
picture indicates the scale and the anatomical orientation. The three ossicular
ligaments, the posterior incudal- (PIL), the superior (SML) and the anterior malleal
ligament (AML) are highlighted (orange area) and the centers of mass (red dots) as
described by Kirikae (1960) are indicated for both, malleus (M) and incus (I). Each
picture represents the motion pattern at a specific frequency (indicated on top of each
picture). The color coded iso-displacement lines refer to maximal displacements and
their values refer to the scale bar indicated in each picture. The white axes and
arrows indicate the main motion components at the specific frequency.
Results
V.2.2
94
Quantitative approach
Due to the measurement technique applied in the present study, only three motion
components, one translation and two rotations, could be detected, analyzed and
interpreted. In a linear system, which comprises several degrees of freedom, the
mode in which a body moves does not change with intensity but with frequency. In
general, the modes become more complex the higher the stimulation frequency is.
Simple modes might be described by a singe motion component (e.g. one rotation)
whereas a complex mode constitutes an interplay of several motion components. A
stationary axis of rotation is not observable anymore.
The quantitative approach presented here was based on the principle of splitting the
complex motion pattern into three motion components. In the previous section it was
shown that motion patterns of the ossicular chain become increasingly complex with
frequencies. The position and orientation of an axis of rotation are not just changing
with frequency but can even change within a cycle of an oscillation at one specific
frequency. In order to quantify these motion patterns across all frequencies tested a
fixed coordinate system (the virtual coordinate system) was defined which contains
the three possible motion components.
V.2.2.1
The three motion components
In order to quantify the ossicular motion and compare it among the various
specimens investigated in this study a fixed coordinate system (the virtual coordinate
system) was introduced. This coordinate system was aligned to anatomical
landmarks and was thus coherent for all specimen tested. The complex motion of the
ossicles was split into the three motion components offered by the three-dimensional
coordinate system (see III.5.1). Since all three motion components contribute to the
ossicular motion in the area of the IMJ (see IV.4) and since its motion pattern is
complex (see V.2.1) it is unlikely that their contribution is constant over frequency.
Therefore it can be expected that their frequency response does not only reflect the
frequency respond of the umbo but that each of them has its own characteristics. In
order to produce these characteristics the frequency responses of the three motion
components in figure V.10 are given for a flat multi-sine signal at 90 dB SPL at the
TM as well as normalized to a flat umbo displacement response of 10 nm. As a
reference, the frequency response of the umbo (open MEC) for specimen #54 is
shown in figure V.9. By compensating for the displacement of the system, the three
motion components yield their own frequency characteristics. The graphs to the left
in figure V.10 contain the frequency responses of malleus and incus for the three
evaluated motion components. The frequency characteristic of the umbo
displacement is evident in all three components but it is best represented by the ωycomponent of the malleus. The decay starting at 1.3 kHz, the kink at about 2 kHz, the
notch at 5.3 kHz and the peak at 6 kHz observed in the umbo displacement are all
reflected by that component. In general, at the low frequencies all components have
their maximum due to the displacement peak of the umbo but none of the
components mirrors the input characteristic of the ossicular chain as precisely as the
Results
95
ωy-component. For the translation (vt) at high frequencies (>3 kHz) and the ωycomponent over the whole frequency band the displacements of the malleus exceed
those of the incus. For completion the rotational component ωx is also indicated but
due to control experiment IV.4 its significance is questionable.
#54 umbo displacement (open MEC)
displacement [nm]
100
10
1
100
1000
10000
Fig. V9: Umbo displacement
under the open MEC condition
at 90 dB SPL at the TM. The
umbo
displacement
of
specimen #54 is displayed
here as a reference to the
following figure which shows
the motion components in the
IMJ area of that specimen. It is
the same specimen on which
the qualitative approach was
based.
frequency [Hz]
In the graphs on the right, the contribution of frequency dependence of the umbo
displacement to the motion components is removed by normalization revealing the
isolated frequency dependence of the motion components. Up to 1.6 kHz the ωycomponent of the malleus is flat, decays towards 2 kHz, proceeds rather flat to 6 kHz
and increases again towards higher frequencies. The mean normalized displacement
between 0.5 and 1.5 kHz equals 8 nm and over the entire frequency spectrum tested
the angular displacement (ωy-component) maximally deviates by +4.1 dB (at 10 kHz),
respectively by -4.7dB (at 2.4 kHz) from the mean value. In other words, this
component reflects the flat response of the umbo pretty well. The two other
components (vt, ωx) deviate from their mean value by up to +13 dB, respectively -23
dB, that is to say they are far away from a flat frequency response. It is further
prominent in all three motion components that above 6.5 kHz their frequency
responses increase. Above 7.5 kHz the angular displacements of the ωy-component
exceed the values of the flat response seen at low frequencies.
The magnitudes of the three motion components are shown in figure V.11 for all 27
investigated specimens. At the lower frequencies all three motion components show
similar magnitudes for malleus and incus. Towards higher frequencies the malleus
values exceed those of the incus which is most prominent for the ωy-component. As
mentioned above the displacements of the incus generally undershoots those of the
malleus which implies relative motion between the two ossicles. Since the evaluation
of the three motion components was based on the same virtual coordinate system
their frequency responses must overlap if the two objects described (malleus, incus)
functionally constitute one rigid body. This is obviously not the case and it is the goal
of the next chapter to throw light on the transmission properties of the IMJ.
Results
96
#54 three motion components with reference to 90dB SPL at the TM and to a
flat umbo displacement of 10 nm
displacement [nm]
10
vt
vt
1
0.1
0.01
Malleus
Incus
10
ωx
ωx
ωy
ωy
1
0.1
0.01
100
6
ang. displacement *10 [°]
6
ang. displacement *10 [°]
0.001
10
1
0.1
frequency [Hz]
10000
1000
10000
100
1000
100
0.01
frequency [Hz]
Fig. V.10: The three motion components, one translation (vt) and two rotations ( ωy
and ωx) are shown with reference to 90 dB SPL at the TM (three graphs to the left)
and normalized to a flat umbo displacement of 10 nm (three graphs to the right).
Each graph contains one motion component indicated for both malleus (black line)
and incus (grey line). Figure V.9 serves as a reference, since the data in the right
graphs of this figure were compensated for that frequency response. The data is
shown for specimen #54.
Results
97
malleus components
incus components
displacement [nm]
100
vt
vt
ωx
ωx
ωy
ωy
10
1
0.1
0.01
10
6
ang. displacement * 10 [°]
0.001
1
0.1
0.01
100
6
10
1
0.1
frequency [Hz]
10000
1000
10000
100
100
0.01
1000
ang. displacement * 10 [°]
0.001
frequency [Hz]
Fig. V.11: Three motion components (vt, ωy, ωx ) of malleus (left column) and incus
(right column) (n=27). At low frequencies (< 1.5 kHz) the malleus displacements
and incus displacements are similar for all three motion components, whereas at
higher frequencies displacements of the malleus exceed those of the incus, which is
most prominent for the ωy-component. Black solid line indicates the mean. Angular
displacement values are scaled by a factor of 106.
Results
98
V.3
Middle-ear transmission
V.3.1
Joint transmission
The qualitative description of the ossicular motion in the area of the IMJ
demonstrated in specimen #54 suggested that the malleus and incus move more or
less independent form each other, especially at higher frequencies (> 2 kHz) (see
V.2.1). Consequently there is relative motion between them. One way to look at the
transmission properties of the IMJ is to develop the transfer function for each of the
evaluated motion components. The amplitude and the phase of each transfer
function were evaluated as described in III.5.5 and are shown for specimen #54 in
figure V.12.
#54 IMJ transfer function
6
amplitude
5
4
3
2
1
vt
ωx
ωy
0
100
phase [°]
0
-100
-200
-300
-400
100
1000
frequency [Hz]
Fig. V.12: IMJ transfer
functions for the three motion
components
(vt, ωy, ωx).
(upper graph) shows the
amplitude of the transfer
functions
calculated
by
dividing the magnitude of
each
incus
motion
component by the magnitude
of the respective malleus
component. (lower graph) By
subtracting the phase of the
malleal motion component
from
the
corresponding
incudal motion component
the phase of the transfer
function was achieved. In the
case
of
two
bodies
functionally linked to one
rigid body the amplitudes
would equal '1.0' and the
phases remain at '0' over all
frequencies
tested.
The
transfer
functions
are
based
10000
on the motion components
shown in figure V.10.
The interpretation of the amplitudes of the transfer functions from the motion
components shown in figure V.10 is straight forward. Divergence of a malleus and an
incus component causes deviations of the transfer function amplitude from '1.0'.For
malleus displacements that exceed those of the incus the amplitudes show values
below '1.0' and vice versa. The upper graph in figure V.12 indicates that relative
motion in the IMJ occurs for all three motion components, especially at higher
frequencies (> 2 kHz). Phases are close to '0' up to 0.9 kHz that is to say the two
Results
99
ossicles approximately move in phase (lower graph). At higher frequencies the incus
generally lags behind the malleus. The phase of the ωx-component is positive
between 1.2 and 3.2 kHz. The amplitude and the phase of the ωy-component indicate
a resonance at 1.7 kHz where the amplitude reaches its maximum and the phase
drops. This is also true for the strong resonance in the ωx-component at 4.4 kHz but
the steep phase drop of the vt-component at 3.2 kHz does not show a peak in
amplitude at that frequency. Transfer functions like those shown in figure V.12 were
developed for all temporal bones in which the motion at the IMJ was analyzed (n=27)
and are displayed in figure V.13. The mean value of the 27 frequency responses is
indicated by the thick solid line.
three transfer functions (n=27)
5
amplitude
4
vt
3
2
1
0
5
amplitude
4
ωx
3
2
1
0
amplitude
1.5
ωy
1
0.5
0
100
1000
frequency [Hz]
Fig. V.13: Amplitudes of
transfer functions for the three
motion
components
(vt, ωy, ωx).
Each
line
represents one specimen
(n=27) and the thick black line
indicates their mean. For vt
the values are close to '1.0'
up to about 2 kHz. At higher
frequencies
the
scatter
increases but the mean
indicates a decrease with
frequency. A similar picture is
presented
by
the
ωxcomponent but the scattering
is even higher. The mean
value also approximates '1.0'
up to about 2 kHz and tends
to fall with frequency.
For the ωy-component a
characteristic shape of the
frequency response can be
recognized and the scatter is
much lower than that of the
other
two
components.
Starting at 0.5 kHz, the
amplitudes proceed rather flat
until they rise to reach a peak
which is flattened in the mean
due to scattering along the
frequency
axis.
Towards
higher frequencies, the peak
is followed by a steep
downward
slope
which
10000 bottoms out at about 3 kHz.
Results
100
In general, for the vt- and the ωx-component the standard deviations are high and a
general pattern was not observed. However, up to about 2 kHz the two components
show mean amplitudes close to '1.0' and they tend to decrease with frequency.
Despite substantial differences between the specimens, the ωy-component shows a
characteristic frequency response which is identifiable in all temporal bones. The
substantial standard deviations are due to shifts of that characteristic frequency
response along the frequency and the amplitude axis. Starting at 0.5 kHz, the
amplitudes vary between 0.4 and 1.0 and proceed almost flat for several 100 Hz (low
frequency tail) until they rise to reach their peak typically between 1 to 2 kHz.
Towards higher frequencies, the peak is followed by a steep downward slope which
bottoms out at about 3 kHz. The amplitudes then either remain flat or increase
slightly towards 10 kHz.
V.3.1.1
Linearity of joint transmission
It was earlier shown in control experiment IV.1.2 that the displacements in the area of
the IMJ are significantly lower compared to those acquired at the umbo. Differences
of up to 25 dB were measured. It was therefore difficult to achieve good
measurement quality (high coherence) at sound pressure levels of 70 dB whereas at
the umbo measurements still yielded good results at sound pressure levels down to
50 dB. Nevertheless IMJ-scans were performed at several sound pressure levels (75,
80, 85 and 90 dB) in order to find out whether the joint transmits sound energy in a
linear way. The upper sound pressure limit of the experiment was set by the
loudspeaker (see III.3.1). Useful results down to 80 dB SPL were only derived from 4
temporal bones. In figure V.14 the amplitude of the transfer function is shown for the
ωy-component of specimen #18. The three frequency responses were acquired at 80,
85 and 90 dB SPL. At all three sound pressure levels the frequency responses
remained stable. The frequency responses at 85 and 80 dB SPL deviated maximally
by ±1dB from the frequency response acquired at 90 dB SPL. No systematic
changes with intensity were observed in any of the four tested specimens.
#18 linearity of IMJ transfer function
1
amplitude
0.8
0.6
0.4
0.2
0
100
90dB
85dB
80dB
1000
frequency[Hz]
Fig. V.14: The transfer
function of the ωy-component
measured at three stimulus
levels are illustrated for
specimen #18. The three
frequency responses were
acquired at different sound
pressure levels (80, 85 and
90 dB). No systematic
changes with stimulation
intensity were observed and
the three responses almost
10000 overlap.
Results
V.3.2
101
Ossicular transmission
Although it was shown in control experiments IV.4 and IV.5 that the ωy-component
dominates the ossicular motion and that its own transmission properties almost
define those of the ossicular chain, there remains the necessity to consider all three
motion components in the evaluation of the ossicular transmission. The anatomical
dimensions and the suspension of the incudo-malleolar complex in the MEC which
might play a crucial role in transmitting sound to the inner ear are not regarded in the
joint transmission. Ossicular transmission includes these structures. The
displacements of the umbo and the LPI were reconstructed based on their x and y
coordinates and the three motion components evaluated for the corresponding
ossicle, the malleus or the incus respectively. The procedure was described in detail
in III.5.2.3 and III.5.6. The transfer function was developed by dividing the maximal
displacement of the LPI by the maximal displacement of the umbo. Despite ignoring
the incudo-stapedial joint and the stapes this transfer function is here called the
"ossicular transfer function". The procedure was applied to 15 temporal bones. For
specimen #54 the amplitude and the phase of the transfer function are displayed in
figure V.15. The ossicular transfer function (grey solid line) is opposed to the transfer
function of the ωy-component (black solid line). Amplitudes and phases are very
similar for both transfer functions. However, the transfer function of the ωy-component
exceeds the ossicular transfer function over the entire frequency band tested.
#54 ossicular transmission
1
amplitude
0.8
0.6
0.4
0.2
TFi/u
TF-I/U
TFωy
TF-y
TFωycorr
corr
TF-y
0
50
phase [°]
0
-50
-100
-150
100
1000
frequency [Hz]
Fig. V. 15: Amplitude and
phase of three transfer
functions based on IMJmeasurements. TFωy is the
transfer function of the
rotational
ωx-component
(black solid line). TFi/u is
based on the displacement
reconstruction of the umbo
and the LPI and considers all
three motion components
(grey solid line). The filled
circles represent the transfer
function TFωycorr which was
evaluated by correcting TFωy
by the ossicular ratio of
specimen #54. The shapes
of TFωy and TFi/u are very
similar in amplitude and
phase and by correcting the
amplitude of TFωy for the
ossicular ratio (r=1.25) they
(TFi/u, TFωycorr) almost
overlap. The correction only
10000
affects the amplitude.
Results
102
In fact there is a parameter which was only considered by one of the two transfer
functions. This parameter is the ossicular lever ratio. The ossicular transfer function
was calculated by multiplying the three motion components of the corresponding
ossicle by the coordinates of the umbo and the LPI, respectively. The x coordinates
of the two structures deviate clearly from each other since the processes of the two
ossicles, the manubrium and the long process of the incus differ in length and
thereby build a lever ratio. It is therefore reasonable to correct the transfer function of
the ωy-component by this ratio. For specimen #54 the ratio between the umbo and
the LPI was 1.25. The corrected frequency response in the upper graph of figure
V.15 is indicated by filled circles. Now the corrected joint transmission (TFωycorr)
approximates the ossicular transmission (TFi/u) better. Below 1.5 kHz and above 5.3
kHz the two frequency responses almost overlap. Over all frequencies mean
differences of 1.8 dB (± 2.1 dB) remain. However, prominent differences remain
between 1.6 and 2.4 kHz (max. 5 dB) and between 3.6 and 5.3 kHz (max. 8 dB). In
these frequency regions TFωycorr still exceeds TFi/u.
The same procedure was applied to all specimens for which the ossicular transfer
function (TFi/u) was calculated (n=15). Transfer functions TFωy were corrected by the
individual ossicular lever ratio witch equaled 1.19 (± 0.1). The mean amplitudes of the
three transfer functions, TFωy, TFi/u and TFωycorr are shown in figure V.16. Similar
to specimen #54 the transfer function of the ωy-component (TFωy) exceeds the
ossicular transfer function (TFi/u). After correction of the TFωy for the individual
ossicular lever ratio the resulting transfer function (TFωycorr) almost perfectly
approximates TFi/u. The remaining differences between TFωycorr and TFi/u are
negligible 1 dB (0.45 dB ± 0.03 dB) and prominent differences as shown in figure
V.15 for specimen #54 do not remain. The results shown in figure V.16 once more
underline the dominance of that component. More demonstrative for the
comprehension of the ossicular transfer function is the consideration of the input
(umbo) and output (LPI) of the ossicular chain and the illustration of transmission
losses in decibels.
Fig. V.16: Mean amplitudes
of transfer functions TFωy,
TFi/u and TFωycorr. for 15
specimens. Separately for
each specimen the corrected
transfer function amplitude
TFωycorr. was developed by
dividing
TFωy
by
the
individual ossicular lever
ratio.
Minor
deviations
between TFωycorr. and TFi/u
remain (0.45 dB ± 0.03 dB)
10000 but the approximation is very
good.
rel. transmission loss [dB]
joint and ossicular transmission (n=15)
5
0
-5
-10
-15
-20
-25
100
TFi/u
TF-I/U
TFωy
TF-y
TFωycorr
TF-ycorr
1000
frequency [Hz]
Results
103
Figure V.17 provides this information for the 15 specimens considered in figure V.
16. Mean and standard deviations are indicated for umbo and LPI displacements
based on the displacement reconstruction of the two structures (upper graph). In the
graph below the relative transmission losses (in decibels) were evaluated for each
specimen and mean and standard deviations are indicated. The frequency response
of the umbo velocity involves the transformation of sound pressure into volume
velocity of the TM, the transmission of the latter to the umbo and finally the
compliance of the umbo. In addition, the frequency response of the LPI comprises
the ossicular transmission. Therefore, the middle-ear transmission can be split into
the admittance of the umbo and the ossicular transmission. This separation is
important in order to detect possible compensations of one part when parameters of
the other part are changed (see. V.4).
Fig.
V.17:
Relative
transmission losses of the
ossicular chain. (upper
graph) reconstructed umbo
and LPI velocities (mean
and standard deviations). A
multi-sine stimulus at 90 dB
SPL served as acoustic
signal. (lower graph) The
relative loss in transmission
between the umbo and the
LPI were calculated for
each specimen (n=15) and
the mean and standard
deviations are indicated.
Usually transmission losses
have negative values but in
some
specimens
the
amplitude of the TFi/u
exceeds the value of '1.0'.
Above 1 kHz the mean
transmission losses fall with
about 4 dB per octave.
ossicular transmission losses
0.001
velocity [m/s]
LPI
umbo
0.0001
0.00001
rel. transmission loss [dB]
0.000001
5
0
-5
-10
-15
-20
-25
100
1000
frequency [Hz]
10000
The ossicular transfer function described so far only regarded the transmission
properties of the ossicular chain itself and transmission of sound to the LPI was not
considered. The predicted velocity of the LPI measured with a constant sound
pressure (the 90 dB multi- sine signal) is proportional to the transfer admittance of
the LPI. In figure V.18 the velocity of the LPI is illustrated for specimen #54 (left
graph) and for all 15 specimens for which the umbo and LPI displacements were
Results
104
reconstructed. The data is here given in velocities (m/s) because this measure can
be directly related to sound pressure.
The maximal velocity in specimen #54 is reached at about 0.9 kHz. From there the
velocity continuously decreases with frequency, reaching a minimum at 4.6 kHz and
rises to a plateau at higher frequencies. In general, the LPI velocities in the other 15
specimens show a similar behavior. The peak around 1 kHz and the downward slope
towards higher frequencies constitutes a general pattern which applies to all of the
temporal bones investigated and is also apparent in the mean frequency response.
Twelve out of 15 specimens showed a notch in the frequency response of the LPIvelocity between 1.4 and 5.3 kHz. Due to the broad scattering along the frequency
axis these details disappear in the mean frequency response.
LPI velocity at 90 dB SPL at the TM
0.001
velocity [m/s]
#54
n=15
0.0001
0.00001
frequency [Hz]
10000
1000
10000
100
1000
100
0.000001
frequency [Hz]
Fig. V.18: Reconstructed velocities of the LPI at a sound pressure level of 90dB at
the TM. The acoustic signal was a multi-sine signal at 90 dB SPL. The data was
corrected for the sound pressure deviations caused by the sound pressure calibration
(± 3 dB). LPI velocities are shown for specimen #54 (left graph) and for a group of 15
temporal bones (right graph) including specimen #54. The black solid line indicates
the mean frequency response.
Results
V.4
105
Experimental fixation of the IMJ
In order to quantify the transmission losses caused by the mobility of the IMJ the joint
was experimentally fixed as described in III.4.3. The transmission gain achieved by
experimentally fixing the joint should be inverse of the losses caused by the mobility
of the joint. The aim of this experiment was the quantification of transmission losses
caused by the mobility of the IMJ and to throw light on possible advantages of a three
ossicles middle ear. It is important to keep in mind that the fixation of the joint affects
the entire mechanical system, the compliance at the entrance of the middle ear
(umbo), the joint itself and therefore also the ossicular transmission. The biologically
relevant parameter affected by any changes in the middle-ear functionality remains
the transmission of sound. These considerations are taken into account for this
experiment.
This experiment was performed in 14 temporal bones. The results are presented for
specimen #54 and for the entire test group (n=14). To improve figure legibility,
standard deviations are alternately shown for one and the other frequency response
when two mean frequency responses are illustrated.
V.4.1
Control
Proper fixation of the IMJ was checked immediately after the fixation by looking at the
animation of the displacements in the joint area measured post fixation. Fixations
considered to be insufficient at that stage were re-done.
The efficacy of each fixation was also estimated after the experiment by evaluating
the joint transmission. Only for this transmission subtype can the consequence of a
proper fixation be predicted. If the joint fixation was successful, the amplitude of the
joint transfer function of each motion component would be 1.0. For the ossicular and
the sound transmission the effect of the joint fixation is unspecified.
residual joint transmission losses
rel. transmission [dB]
15
10
5
0
-5
-10
-15
100
1000
frequency [Hz]
Fig. V.19: Mean relative joint
transmissions of the ωycomponent (n=14). The black
solid line indicates the mean
transmission loss in the mobile
IMJ and the mirrored dashed
line represents the desired
transmission gain by fixation.
The attained transmission gain
by fixation is given by the gray
solid line and the remaining
transmission loss by the closed
10000 circles. Below ~2 kHz the IMJ
was successfully immobilized
whereas above 2 kHz some
transmission losses remained.
Results
106
Since the IMJ area was scanned after each attempted fixation the successful as well
as some failed cases were documented. In general, the fixation of the joint turned out
to be very difficult and perfect fixation (amplitude of TFωy = 1.0) was never achieved
over all frequencies. In the optimal case the transmission losses of the mobile joint
should be compensated by the relative joint transmission gain achieved from the
fixation. This is shown in figure V.19 where the desired gain from fixation (dashed
line) is shown as the mirrored joint transmission loss (TFωy) of the mobile IMJ (black
solid line). The figure contains the mean values of the 14 specimens tested. The joint
transmission gain effectively attained by the fixation is indicated by the grey solid line.
The difference between the dashed and the grey solid line yields the remaining loss
in the joint transmission after experimental fixation of the IMJ. At lower frequencies (<
2 kHz) ideal fixation was achieved whereas above 2 kHz some joint transmission
losses usually remained.
Figure V.20 exhibits the joint transmissions for specimen #54 (left graph) and for all
14 specimens in which the experimental IMJ-fixation was performed (right graph).
Only the ωy-component is indicated before (black solid line) and after (grey solid line)
experimental fixation of the IMJ. In addition, for specimen #54 the result of a failed
joint fixation is indicated by the open circles. Except for reduced transmission losses
at higher frequencies (> 3.5 kHz) and the loss of the notch at about 4.5 kHz the
transmission losses in the ωy-component are very similar before and after insufficient
IMJ-fixation.
5
n=14
#54
0
-5
-10
mobile
-15
mobile
not fixed
failed
fix
fixed
-20
fixed
frequency [Hz]
10000
1000
10000
100
1000
-25
100
rel. transmission loss [dB]
joint transmission of ωy-component before and after IMJ-fixation
frequency [Hz]
Fig. V.20: Joint transmission losses of the ωy-component before and after
experimental fixation of the IMJ. (left graph) Transmission losses before (solid black
line), after insufficient (open circles) and after successful fixation (grey solid line) in
specimen #54. (right graph) Transmission losses before and after IMJ-fixation in all
14 specimens tested. In general, transmission losses were reduced by the
experimental fixation. Proper fixation was only achieved at low frequencies (< 2 kHz)
whereas above 2 kHz residual transmission losses usually remained.
Results
107
The second fixation trial turned out to be successful and the joint transmission losses
are close to 0 dB. Similar results were gained from all 14 specimens. In general, joint
transmission losses were significantly reduced over all frequencies tested. In the
lower frequencies (< 2 kHz) transmission losses disappeared whereas above 2 kHz
some residual joint transmission losses remained. Among the 14 specimens the IMJfixation in temporal bone #54 was most successful.
V.4.2
Changes in ossicular transmission
In V.3.2 it was shown that the ωy-component of the joint transmission can differ (Fig.
V.15) from the ossicular transmission, first, due to the fact the anatomical ossicular
lever ratio is not included in the joint transmission and, second, because two
additional motion components (vt, ωx) contribute to the ossicular transmission. The
effects of the IMJ-fixation on the ossicular transmission are therefore separately
shown in this section. The ossicular transmission is given for specimen #54 and for
all 14 specimens tested in figure V.21. Similar to the joint transmission the ossicular
transmission reveals a significant decrease of transmission losses over all
frequencies after the IMJ fixation. However, for insufficient as well as for successful
joint fixation in specimen #54 a notch remains in the ossicular transmission at 3 kHz.
ossicular transmission before and after IMJ-fixation
#54
0
n=14
-5
-10
-15
mobile
failed
fix
not fixed
fixed
100
-30
frequency [Hz]
10000
100
fixed
10000
-25
mobile
1000
-20
1000
transmission loss [dB]
5
frequency [Hz]
Fig. V.21: Ossicular transmission before and after experimental IMJ-fixation for
specimen #54 (left graph) and for the entire test group of 14 specimens (right graph).
The open circles in the left graph indicate the ossicular transmission losses after
insufficient IMJ-fixation. Again, a general reduction in ossicular transmission is
evident over all frequencies. At lower frequencies (< 1.5 kHz) where losses in the
joint transmission disappeared after successful IMJ-fixation the ossicular
transmission still reveals a constant transmission loss of about -2 dB. Above 2 kHz
additional losses like those observed in the joint transmission increase the total loss
to -4 dB.
Results
108
At lower frequencies (< 1.5 kHz) the joint transmission shows no more transmission
losses after the IMJ fixation. Nevertheless, up to ~1.5 kHz a loss of about -2 dB
remains in the ossicular transmission (compare left graphs of figure V.20 and figure
V.21.). Above ~1.5 kHz additional transmission losses appear and the standard
deviations increase. The standard deviations among the 14 investigated specimens
decreased after the IMJ-fixation. Standard deviations are smallest at frequencies
where the IMJ-fixation was most successful (< 1.5 kHz).
The insufficient fixation in specimen #54 also leads to a minor transmission gain at
lower frequencies and a significant gain above 3.5 kHz but it still clearly deviates
from the gain reached by a successful fixation. In general, the effects from the IMJfixation observed in the ossicular transmission are very similar to those effects
observed in the ωy-component of the joint transmission.
V.4.3
Changes in sound transmission
Possible changes in sound transmission due to the experimental fixation of the IMJ
reveal those sound transmission characteristics of the middle ear which can be
ascribed to the mobility of the IMJ. Such changes are interesting, since sound
transmission is finally the biologically relevant parameter.
sound transmission before and after IMJ-fixation
0.001
n=14
velocity [m/s]
#54
0.0001
mobile
mobile
not fixed
failed
fix
0.00001
fixed
fixed
frequency [Hz]
10000
1000
10000
100
1000
100
0.000001
frequency [Hz]
Fig. V.22: Changes in sound transmission due to the fixation of the IMJ for specimen
#54 (left graph) and for the entire test group (n=14) (right graph). The data shows the
velocities of the LPI under a multi-sine signal at 90 dB SPL at the TM. Sound
transmission gain at low frequencies (< 2 kHz) was already achieved by the
insufficient fixation in specimen # 54. This gain at the low frequencies was smaller for
the proper joint fixation. Above 3.5 kHz the sound transmission gain increases with
the rigidity of the IMJ. Over all 14 experiments the IMJ-fixation did not lead to a sound
transmission gain at low frequencies but the gain increased with frequency above ~2
kHz. The standard deviations above ~2 kHz were reduced by the IMJ-fixation.
Results
109
In figure V.22 the changes in sound transmission are produced by joint fixation are
shown for specimen #54 (left graph) and for the entire test group (n=14) (right
graph).Insufficient fixation in specimen #54 caused an increase in sound
transmission at lower frequencies (< 1.2 kHz) and a slight downward shift of the first
detected resonance. This sound transmission gain was smaller for the properly fixed
IMJ, but the shift of the first resonance remained. At higher frequencies the sound
transmission gain increased with the rigidity of the IMJ that is to say it was larger for
the successfully fixed IMJ compared to the insufficient fixation. The mean results of
all 14 specimens reveal no differences in sound transmission below 1.5 kHz whereas
fixation caused a sound transmission gain above 1.5 kHz which increased with
frequency. The large standard deviations before fixation between 3-5 kHz were
clearly reduced by the IMJ-fixation.
V.4.4
Transmission gain by IMJ-fixation
Since proper fixation was difficult and not achieved in all 14 specimens a selection
criterion was made in order to screen for the specimens in which fixation was most
successful. To do this, the correlation was computed between the joint transmission
gain achieved by fixation and the joint transmission loss before fixation. In the case of
perfect fixation this correlation would equal '-1.0' meaning that all transmission losses
in the joint disappeared after fixation. In figure V.23 this correlation is shown for all
14 temporal bones of the fixation test group. In seven (black solid lines) out of 14
specimens (grey and black lines) the IMJ-fixation was considered to be successful
since the correlation was between -0.5 and -1.5. The following results only
considered these seven temporal bones. The transmission gains reached by
experimentally fixing the IMJ in the 7 specimens selected by the former selection
criterion are shown in figure V.24. The left graph, again, shows the transmission
gains for specimen #54 which also met the selection criterion. Since the right graph
exhibits averaged values for all 7 specimens the left graph reveals more details about
the relation between the three transmission gains.
Fig. V.23: Correlation between
the joint transmission gain
achieved by the IMJ-fixation
and the joint transmission loss
before fixation was used as a
selection
criterion
for
successful IMJ-fixation. For
seven specimens (black solid
lines) out of 14, fixations were
considered to be successful
since their correlation was
between -0.5 and -1.5.
selection criterion
1
correlation [/]
0.5
0
-0.5
-1
-1.5
-2
100
1000
frequency [Hz]
10000
Results
110
At low (< 1 kHz) and at high frequencies (> 5 kHz) the joint and the ossicular
transmission almost overlap; at frequencies in between they are similar but
significant differences exist. The abrupt change in ossicular and sound transmission
gain at 3 kHz is caused by the notch in ossicular transmission remaining after fixation
of the IMJ (see V.4.2). Large transmission gains appear between 3.5 and 5 kHz
because the notch in that frequency band apparent in all three transmission losses
before fixation (see V.20, 21, 22) was eliminated by the IMJ-fixation. The
characteristics of the ossicular transmission gain are accurately reflected in the
sound transmission gain but the ossicular transmission gain exceeds the sound
transmission gain over all frequencies tested by 5.8 dB (± 2.4 dB). Since joint and
ossicular transmission losses before and the gain in theses transmissions after IMJfixation are rather low (~5 dB; see figure V.20 and V.21) almost no sound
transmission gain remained below ~1 kHz. The results from specimen #54 generally
apply to all 7 specimens (right graph). Due to the averaging details in the three
transmission gains vanished but still the joint and the ossicular transmission gain
overlap below 1 kHz and above 5 kHz, all three transmission gains show a
qualitatively similar course over the frequency band tested and the sound
transmission gain shows significantly lower values than the ossicular transmission
gain. Below 1.5 kHz no sound transmission gains appears whereas at higher
frequencies sound transmission gains increase with frequency and reach about 10
dB at 4 kHz.
Sound transmission gain from successful IMJ-fixations
rel. gain [dB]
30
joint
TFωy
ossicular
TFi/u
TFsound
sound
20
10
0
frequency [Hz]
10000
1000
100
10000
1000
100
-10
frequency [Hz]
Fig. V.24: Relative transmission gains achieved after successful IMJ-fixation in
specimen #54 (left graph) and in all 7 specimens (including #54) which met the
selection criterion (right graph). In general the frequency responses of the three
transmission gains (joint (TFωy), ossicular (TFi/u) and sound (TFsound) transmission
gain) have similar characteristics. At low (< 1 kHz) and high frequencies (> 5 kHz) the
joint and the ossicular transmission gains overlap but at frequencies in between some
deviations could be observed in all seven specimens tested.
Results
V.4.5
111
The three motion components after IMJ fixation
In section V.2.2.1 the three motion components (vt, ωx, ωy) of the malleus and incus
are described for the normal middle ear (specimen #54). The components were once
indicated with reference to a 90 dB sound pressure level at the TM and once with
reference to a flat umbo displacement of 10 nm.
It is interesting to see what effect the IMJ fixation has on the three motion
components. The three motion components in the normal middle ear and after
fixation of the IMJ are shown with reference to an umbo displacement of 10 nm (over
all frequencies) in figure V.25. The data for normal middle ears in the left column
were taken from figure V.10 (right column). Results are only shown for specimen
#54 but the results are representative for all 7 specimens in which joint fixation was
considered to be successful.
Before joint fixation the three motion components of the malleus generally exceed
those of the incus (left column). It is evident that after joint fixation the motion
components of the malleus and incus overlap (right column). The motion components
of both ossicles were separately analyzed but they refer to the same virtual
coordinate system. By fixation the two ossicles were functionally linked to one rigid
body, and now move in the same manner. Since the three motion components are
identical for both ossicles the effect of fixation is only described for the malleus.
For the translational component vt changes caused by joint fixation are minimal at
low frequencies (< 1.5 kHz). The peak remains at about 1.8 kHz but its amplitude is
slightly increased. Towards higher frequencies the translational component (vt)
continuously decreases with frequency. Most prominent changes by fixation were
found in the ωx-component. The low frequency slope became steeper and the peak
amplified. The high values of that rotational component, in the high frequencies,
disappeared by fixation and changed into a flat course. Finally, the ωy-component
shows the slightest changes due the joint fixation. At low (< 1.5 kHz) and at high
frequencies (> 3.5 kHz) the values for this rotation almost remained. The peak is
maintained at 1.7 kHz, where the downward slope toward higher frequencies starts.
Up to the frequency, where the left graph shows a notch (2 kHz), the latter is almost
identical to the frequency response after fixation. Above 2 kHz the ωy-component of
the malleus increases again in the normal middle ear and reaches a stable value
above 3 kHz. After fixation (right graph) the roll-off continues to the notch at 2.4 kHz
at the same rate as before fixation. Above that frequency the values increase again
and reach the similar level as before fixation.
Generally it can be stated that the ossicular motion of the malleus had not
dramatically changed by the fixation of the IMJ. None of the three components was
suppressed or promoted by the fixation of the joint. The component, which was
expected to be reduced by fixation (ωx-component), since it passes through the IMJ
though, showed the most prominent changes by the fixation but it was generally not
reduced. All three motion components are still present after the IMJ fixation and the
changes due to fixation can be considered small.
Results
112
#54 three motion components with reference to an umbo displacement of
10 nm before and after fixation of the IMJ
displacement [nm]
10
vt
vt
1
0.1
0.01
Malleus
Incus
10
ωx
ωx
ωy
ωy
1
0.1
0.01
10
6
ang. displacement *10 [°]
6
ang. displacement *10 [°]
0.001
1
1000
10000
frequency [Hz]
10000
100
1000
100
0.1
frequency [Hz]
Fig. V.25: The three motion components of the malleus and incus before (left
column) and after (right column) fixation of the IMJ. The data was compensated for
the umbo displacement for the two cases and refer to an umbo displacement of 10
nm over all tested frequencies. Before fixation the components of the malleus diverge
from those of the incus, whereas after fixation the components overlap. The IMJ
fixation did not cause dramatic changes in any of the three components. The
frequency characteristics show still similarities after fixation and none of the three
components was clearly suppressed or promoted by the IMJ fixation.
Results
Effects of age, gender and post mortem time
Low
1.5
High
high- and low frequency variable
amplitude
1
0.5
1000
frequency [Hz]
10000
0
100
IMJ-measurements were performed in 27
specimens, 10 females and 17 males.
The age of the specimens ranged from 19
to 86 years. The aim of this section is to
throw some light on possible effects of the
three variables, age, gender, and post
mortem time (PMT) on the transmission
properties of the middle ear.
As shown in figure V.13 the transmission
characteristics
of
the
IMJ
show
remarkable inter-individual differences.
The frequency responses are shifted
along the amplitude as well as along the
frequency
axis.
The
latter
shifts
complicate the comparison between
individuals. In an attempt to normalize for
frequency
differences,
all
transfer
functions analyzed in this subchapter
were reduced to two variables per
individual. Amplitudes of transfer functions
are relatively stable between 0.5 and 0.8
kHz and between 3.6 and 10 kHz
whereas in the mid frequency range (0.9 3.4 kHz) additional deviations in amplitude
are caused by the peak and the
downward slope in combination with the
inter-individual shifts along the frequency
axis. The interpretation of inter-individual
comparisons in this frequency band
seemed very difficult. Therefore a low and
a high frequency variable were built by
calculating the mean transfer function
amplitude within the two aforementioned
frequency bands (0.5 -0.8 kHz, 3.6 - 10
kHz) for each individual. The two
frequency bands are highlighted in figure
V.26.
First, it was tested whether or not the age
distribution is gender specific. In figure
V.27 the age distribution of the two
genders is shown. The two-sided T-test
revealed
no
statistically
significant
difference between the two distributions
Fig. V.26: For each transfer function a
low (0.5 - 0.8 kHz) and a high (3.6 10 kHz) frequency variable was built
by calculating the mean amplitude
within the two frequency bands (gray
areas) for each individual. In this
graph the amplitude of the transfer
function of the ωy-component serves
as an example.
age of donors
100
80
age [years]
V.5
113
60
40
20
0
9
females
18
males
Fig. V.27: Age of donors (9 females,
18 males). The age ranged from 19 to
86 years. Average age and standard
deviations are indicated separately for
females (white bars) and males (grey
bars).
Results
114
As mentioned in the previous section the
transfer functions were reduced to a low
(0.5-0.8 kHz) and a high (3.6-10 kHz)
frequency variable. The three types of
transmissions (joint, ossicular and sound
transmission) were screened for possible
age effects. In figure V.28 the regression
line for the low and the high frequency
variable of each transmission type is
indicated. The joint transmission was
evaluated in all specimens (n=27) and
the ossicular and the sound transmission
are represented by 15 specimens. The
age related transmission losses are
indicated as the relative loss of the low
and the high frequency variable over the
age range covered by the tested
specimens (19 – 86: 67 years). Results of
ossicular and the sound transmissions
were only available from 15 specimens
ranging from 19 to 81 years of age.
However, the transmission losses were
extrapolated for the entire age range
covered by all 27 specimens (67 years).
For the joint transmission (TFωy; upper
graph) both variables show a tendency to
decrease with frequency. For the low
frequency band the joint transmission
loss over the 67 years equals -4.2 dB and
-10 dB for the high frequency band. The
ossicular transmission (TFi/u; middle
graph) presents a similar picture. Both
variables decrease with age and the age
related loss is smaller for the low (-5.3
dB) than for the high (-9.0 dB) frequency
variable. No age effect was detected for
rel. transmission loss [dB]
Age
rel. transmission loss [dB]
V.5.1
age trend
velocity [mm/s] at 90 dB SPL
(p=0.627).
Therefore,
possible
differences in transmission properties
between genders are not due to a gender
dependent age distribution but due to
gender related differences.
5
TFωy
0
-5
-10
-15
0.5-0.8 kHz
-20
3.6-10 kHz
-25
5
TFi/u
0
-5
-10
-15
-20
-25
0.2
TFsound
0.15
0.1
0.05
0
0
20
40
60
80
100
age [years]
Fig. V.28: Age related transmission
losses for the low (0.5-0.8 kHz) and
the high (3.6-10 kHz) frequency
variable.
Regression
lines
are
indicated for both variables. (upper
graph) joint transmission of the ωycomponent (TFωy; n=27); (middle
graph) ossicular transmission (TFi/u;
n=15);
(bottom
graph)
sound
transmission (TFsound; n=15).
Results
115
TF-y
TF-I/U
TF-sound
LFV
0.27
HFV
0.3
LFV
0.224
HFV
0.267
LFV
0.0007
HFV
0.39
2
Tab. V.1: Correlation coefficients (R )
for the high (HFV) and the low (LFV)
frequency variable of the three transmissions (TFωy; TFi/u; TFsound). LFV:
low frequency variable; HFV: high
frequency variable.
rel. transmission loss [dB]
rel. transmission loss [dB]
Age
effect of gender
velocity [mm/s] at 90 dB SPL
the low frequency variable of the sound
transmission (-0.2 dB). However, for the
high frequency variable the age related
losses in joint and ossicular transmission
were also reflected by the sound
transmission. The regression line
indicates a sound transmission loss of
-10.7 dB over the range of 67 years. The
correlation coefficients (R2) for the linear
regression lines are listed in table V.1.
The values of the correlation coefficients
clearly deviate from '1.0' and therefore
correlation between transmissions and
age of the donors are considered to be
week. The best correlation between
transmission and age was found for the
high frequency variable of the sound
transmission (R2=0.39).
0
-5
-10
-15
female
male
-20
0
-5
-10
-15
-20
TFi/u
-25
0.15
TFsound
0.1
0.05
0
0.5-0.8 kHz
V.5.2
Gender
In section V.5 it was shown that the age
distribution among female and male
donors was not different for all 27
specimens. As mentioned earlier the
ossicular transmission and the sound
transmission data were based on 15
specimens (3 females, 12 males).
Although the tiny number of female
donors reduces the explanatory power
TFωy
3.6-10 kHz
Fig. V.29: Gender specific transmission properties of the middle-ear.
The low and the high frequency
variable are shown for females (white
bars) and males (gray bars); (upper
graph) joint transmission of the ωycomponent (TF-y; n=27); (middle
graph) ossicular transmission (TF-I/U;
n=15);
(bottom
graph)
sound
transmission (TF-sound; n=15). Lines
indicate the standard deviations.
Results
116
V.5.3
Post mortem time
A third parameter which might affect the
results gained from temporal bone
measurements is the time span between
death and the time when experiments
were finished. This will be referred to as
the 'post mortem time' (PMT). The PMT
among the temporal bones used in this
study ranged from 10 to 36 hours. In 10
temporal bones the experiments were
finished at a PMT below 20 hours,
another 14 experiments were performed
within 20 to 30 hours post mortem and
the remaining two experiments were
finished between 30 to 36 hours post
mortem. As mentioned above, the PMT
rel. transmission loss [dB]
rel. transmission loss [dB]
effect of PMT
velocity [mm/s] at 90 dB SPL
of a statistical test all three transmission
types were screened for possible gender
effects (Fig.V.29). At least there was no
difference in the age distribution among
the two genders (p=0.5) in the small test
group (n=15).
The joint transmission (TFωy; upper
graph) whose analysis comprised all 27
donors did not reveal a gender related
difference for the low (p=0.08) or for the
high frequency variable (p=0.77). For the
ossicular transmission (TFi/u; middle
graph) the low frequency variable did not
show differences between the genders
(p=0.16) whereas the high frequency
variable showed significantly higher
losses in the female donors (p=0.00014).
The standard deviations of the high
frequency variable among the three
female donors are remarkably low. For
the sound transmission (TFsound;
bottom graph) no gender effects were
observed. The low as well as the high
frequency variable showed no significant
difference between the two genders
(p=0.53; p=0.87 respectively).
5
TFωy
0
-5
-10
-15
0.5 - 0.8 kHz
-20
3.6 - 10 kHz
-25
5
TFi/u
0
-5
-10
-15
-20
-25
0.2
TFsound
0.15
0.1
0.05
0
0
10
20
30
40
time post mortem [hours]
Fig. V.30: Transmission losses for the
low- (0.5-0.8 kHz) and the high (3.610 kHz) frequency variable against
time post mortem. Regression lines
are indicated for both variables.
(upper graph) joint transmission of the
ωy-component (TFωy; n=27); (middle
graph) ossicular transmission (TFi/u;
n=15);
(bottom
graph)
sound
transmission (TFsound; n=15).
Results
117
marks the end of an experiment. The duration of an experiment varied from 4 to 7
hours. The IMJ measurements of the normal middle ear (before IMJ-fixation) were
performed approximately 3 hours before the end of the experiment, that is to say that
the measurements presented in figure V. 30 were made about 3 hours earlier than
indicated by the PMT. Figure V.30 shows the same data as figure V.28 but the
transmissions are charted against PMT. In general, the scatter of the data about the
linear regression lines is huge and the explanatory power of the regression lines is
doubtful in almost all cases. The correlation coefficients (R2) are listed in table V.2.
The Correlation coefficients for possible correlations between transmissions and the
PMT are very low. No correlation between any of the three transmissions and the
PMT exists.
R2 (PMT)
TF-y
TF-I/U
TF-sound
V.6
LFV
0.004
HFV
0.065
LFV
0.029
HFV
0.069
LFV
0.029
HFV
0.07
Table V.2: Correlation coefficients (R 2)
of the linear regression lines for the three
transmissions charted against PMT. LFV:
low frequency variable; HFV: high
frequency variable.
The cochlear load
The idea of this experiment was to investigate possible effects of the cochlear load
on the dynamic behavior of the IMJ. Some former studies, in which the IMJ dynamics
were investigated and which revealed results that are in contradiction to the present
study (Gundersen & Høgmoen, 1976), were performed without the cochlear load.
Therefore the author was interested in the effect of the cochlear load on the
transmission properties of the middle ear. This experiment was only performed in one
temporal bone (#54). The measurement procedure was identical to the IMJ-scan
applied to all specimens in the main experiment. IMJ measurements were performed
several times: once with the normal middle ear, once after the cochlea was drained
and the cochlear fluid completely removed, and once after the annular ligament was
cut (the stapes was still connected to the Incus and the stapedial tendon).
In figure V.31 the joint transmission (TFωy; top graph), the ossicular transmission
(TFi/u; middle graph) and the sound transmission (TFsound; bottom graph) are
indicated for the three experimental situations: intact cochlea (IC), drained cochlea
(DC) and annular ligament cut (anligcut). Under normal conditions (IC) joint and
ossicular transmissions show the characteristic frequency response as earlier shown
in the main experiments (Fig. V.13 and Fig. V.16). This is also true for the velocity of
the LPI which reflects the transmission of sound (Fig. V.18). For the joint and
ossicular transmission the effects of the two interventions were very similar, whereas
Results
118
sound transmission was affected in a different way. The joint and ossicular
transmission were significantly increased between 1.5 and 7 kHz. Below 1.5 kHz
minor gain in transmission was observed and between 9 to 10 kHz almost no
changes occurred. This was different for sound transmission. The LPI velocity was
more increased below 1 kHz (+11.3 dB, ± 2.7 dB) and above 5 kHz (+14.9 dB, ± 2.3
dB) than at frequencies in between (+8 dB, ± 1.8 dB). Except for some small sound
transmission gain below 0.8 kHz (+2.3 dB ± 0.4 dB) cutting the annular ligament had
only minor additional effects on any of the three middle-ear transmission subtypes.
Effects on middle-ear transmission
rel. transmission [dB]
10
TFωy
0
-10
-20
-30
rel. transmission [dB]
10
TFi/u
0
-10
-20
-30
10
1
0.1
IC
DC
anligcut
0.01
frequency [Hz]
10000
1000
0.001
100
velocity [mm/s]
TFsound
Fig.V.31: Effect of draining the
cochlea and cutting the annular
ligament on the joint (top graph)
and ossicular transmission (right
graph) and sound transmission
(TFsound). For each of the three
transmissions
the
three
situations are shown: intact
cochlea (IC, black solid line),
drained cochlea (DC, grey solid
line) and the annular ligament
cut (anligcut, circles). The effect
of the two interventions is very
similar for the joint and the
ossicular
transmission.
By
draining the cochlea, significant
transmission
gains
were
achieved
at
frequencies
between 1.5 to 7 kHz. Above
and below that frequency band,
transmission gains were small.
This is different for sound
transmission:
draining
the
cochlea causes LPI velocities to
increase more at low (< 1 kHz,
+11.3 dB ± 2.7) and high
frequencies (> 5 kHz, +14.9 dB
± 2.3), than at frequencies in
between (+8 dB ± 1.8). For all
three middle-ear transmission
subtypes the additional effect of
cutting the annular ligament was
small. However, below 0.8 kHz
LPI velocities were slightly (+2.3
dB ± 0.4) increased after this
intervention.
119
Chapter VI
VI
Discussion& Conclusions
VI.1
Validity of applied techniques
VI.1.1
Validity of temporal bone measurements
Whether or not insights gained from experimental studies on human cadaver ears
can be generally applied to the living subject is a legitimate question. Some previous
studies considered this issue and performed noninvasive experiments in living ears
and dead ears. A very early study by Frank (1923) provided some basic information
about this issue. He evaluated the elasticity coefficient of the middle ear by applying
static pressure to the external ear and measuring the induced displacement of the
umbo and the tympanic membrane. No significant difference between dead and living
ears was found. Frank was not surprised by his findings, since he had investigated
the elastic properties of arteries in earlier experiments and observed no changes
between death and the onset of decomposition. Rosowski et al. (1990) showed that
the acoustic impedance did not significantly differ between dead and living ears.
Similar results were provided by Goode et al. (1993) on the umbo velocity. Based on
these findings it can be generally stated that experiments on cadaver ears have
indeed a high scientific value, since they allow highly invasive experiments and the
insights can be applied to the living subject. One indisputable difference between the
dead and the living ear is the action of the middle-ear muscles. However, this might
even be the advantage of working with cadaver ears. The dynamic behavior of the
passive system is complex. The interaction with active, maybe non-linear
mechanisms, enormously complicates the investigation of the basic mechanical
principles of the middle ear. Working on temporal bones enables the undisturbed
investigation of the passive system, one component of the complete system.
Another important aspect which might affect the mechanical properties of cadaver
ears is the experimental condition. A rather unknown but nevertheless valuable piece
of work done by Ramirez-Garcia (1980) measured the middle-ear transfer function in
temporal bones by recording the volume displacement of the round window
membrane at a known sound pressure level. He performed several control
Discussion& Conclusions
120
experiments on which the author would like to shed some light. The characteristics of
the transfer function he measured are discussed later in this chapter (see section
VI.4). His experiments span the frequency band between 50 and 5000 Hz and
yielded the following conclusions:
•
•
•
When temporal bones were kept at room temperature (21°) without regular
moisturization, the middle-ear transfer function showed the first changes after
20 minutes.
Temporal bones were stored in the refrigerator at 4°C (wet, but not in saline).
A first measurement was performed immediately before storage and then
followed by several measurements at regular intervals during the storage
period. A typical middle-ear transfer function showed a prominent peak close
to 1 kHz. After 48 hours of storage there was a noticeable drop of this peak
and the low frequency tail. After 5 days of storage the typical frequency
characteristics of the middle-ear transfer function disappeared.
The middle-ear transfer function of temporal bones once frozen and thawed
typically showed a significant drop in the lower frequencies (< 1 kHz).
Ravicz et al. (2000) supported the last mentioned effect. They compared the stapescochlear input impedance between fresh, and frozen and thawed temporal bones.
Their data showed a reduction in the impedance due to changes of the mechanical
properties of the annular ligament and due to air inclusions in the cochlea. The
authors recommend the use of fresh temporal bones only.
Brenkman & Grote (1987) measured the umbo displacement at 0.6, 2 and 5 kHz in
two specimens starting with a first measurement immediately after the removal of the
temporal bone from the cadaver and repeating the measurements at regular intervals
up to a post-mortem time of 60 hours. Umbo displacements tend to drop with
increasing post-mortem time.
In the present study the listed effects were considered. Therefore, only fresh
temporal bones were used. All experiments were finished after 36 hours postmortem. Care was taken to maintain humidity during the experiment by remoistening
the middle-ear cavities between each measurement (about every 10 minutes). It can
be therefore assumed that the effects described above did not falsify the results of
the present study.
However, one parameter, which has not been mentioned so far, is room temperature.
Body temperature of a living human equals about 37°C but the experiments were
performed at a constant room temperature of 20-22°C. Hence, the question arises
whether temperature affects the mechanical properties of tendons and ligaments.
The joint capsules and tendons of the middle ear are predominantly composed of
elastic fibers (Davis 1948). Gosline and French (1979) investigated the effect of
temperature on the dynamic mechanical properties of bovine elastin, and found no
such effect provided that enough water was available. In contrast, Woo & Young
(1991) found the dynamic behavior of a ligament (ligament of the knee) to strongly
depend on temperature. They observed an inverse relationship between stiffness
and temperature. Akeson et al. (1984) came to similar conclusions. They showed the
Discussion& Conclusions
121
ligament of the knee to be more compliant at 37°C than at 21°C. Gosline and French
specifically investigated the dynamics of elastin whereas Woo & Young and Akeson
et al. investigated a ligament of the knee joint. The composition of skeletal joints and
those of the middle-ear joints might differ. If this is the case, the different findings of
the three studies might not be contradictory since they investigated the mechanical
properties of two different components, elastin or collagen.
If the findings of Woo & Young and Akeson et al. apply for middle-ear mechanics, the
compliance of umbo displacement can be expected to differ between in vivo and in
vitro measurements. As shown later in this chapter (see VI.2.2) this is not the case:
especially at low frequencies umbo displacement data acquired from temporal bone
and in vivo measurements coincide.
The congruence of umbo displacements at low frequencies between the living and
the dead ear suggests that there is no temperature effect, but no conclusive
information on that subject is available. The question, therefore, as to whether
middle-ear mechanics are affected by temperature changes between 20°C and body
temperature (37°C) is still open.
VI.1.2
Applicability of the measurement system
The Laser Scanning Doppler Vibrometer (LSDV) constitutes a powerful
measurement system for investigating small mechanical systems such as the human
middle ear. Its high sensitivity (0.3 µm/s) enables measurements at the TM with
acoustic stimuli of 50 dB SPL (recorded at the TM) or even lower. There is no need
for contact sensors, which might affect the dynamics of such a small and delicate
mechanical system. Measurements can even be performed through glass, which
allows the object of interest to be acoustically separated from the ambient air. The
use of glass to close the ear canal was essential in theses experiments, since the
middle cranial fossa was opened in order to expose the IMJ. The use of the closed
AEEC in combination with LSDV greatly reduced sound transmission between the
two air spaces (AEEC and MEC) during measurements on the umbo and IMJ.
The "scanning" feature enables the detection of complex motion patterns in a short
period of time. The resolution of the measurement grid can be adjusted to the size
and rigidity of the object. Theoretically, three points are sufficient to define rigid body
motion, but in order to describe the complex motion a flexible structure such as the
TM a close meshed set and a high number of measurement points are required.
Finally, the measurement resolution enables control over the amount of information
acquired and the time used for a measurement.
VI.1.3
Use of silver powder and the "signal enhancement" feature
In chapter IV some preliminary experiments are described, which were performed in
order to improve the measurement quality for the main experiments. The results of
these experiments were already discussed in that chapter but the general outcome is
summarized as follows:
Discussion& Conclusions
122
Silver powder was applied to surfaces on which laser Doppler measurements were
performed in order to increase the intensity of the reflected signal. No significant
changes were observed in the frequency response of umbo displacements and the
joint transfer function (TF-y) due to the use of silver powder (see section IV.1.1). The
slight shift of the peak in the joint transfer function towards higher frequencies after
the application of silver powder is probably due to dehydration effects rather than to
the additional load of the silver. In the main experiments the ossicles were
moisturized between each measurement whereas no moisturization was performed
in the silver powder control experiment. However, when using silver powder the
mean values of umbo displacements and the frequency response of the joint transfer
function lie within the standard deviations of measurements performed when using
no silver powder. The slight changes in the joint transfer function can, therefore, be
considered non-significant. Important is that the standard deviations were drastically
reduced when silver powder was applied and therewith the reproducibility of the
measurements increased.
The "signal enhancement" feature of the scanning laser offered another tool enabling
increased accuracy and reproducibility of the measurements. Hence, control
experiments have shown that the mean results are not affected and again, the
standard deviations were clearly reduced (see section IV.1.3).
Due to the increased reflectance of the laser signal by the use of silver powder and
the "signal enhancement" feature, the measurements revealed accurate and
reproducible results at sound pressure levels down to 50 dB at the TM and 80 dB at
the IMJ.
VI.1.4
Accuracy of applied analysis techniques
As shown in section IV.2 the number of points used for the evaluation of ossicular
motion, 25 per ossicle in the main experiments and 15 per ossicle in some control
experiments, yielded stable and reproducible results for all three motion components
(vt, ωx, ωy). Results based on 15 points only deviated at the most by 0.8 dB from
results based on 25 points (Fig. IV.6), and even smaller variations between the
estimates based on 25 points and estimates based on a larger number of points can
be expected.
In the control experiment, described in section IV.6, a direct displacement
measurement on the umbo was compared to the reconstructed umbo displacement
based on the ossicular motion at the IMJ. The experiment revealed very precise
congruence between the two results (Fig. IV.14). This implies that the evaluation of
ossicular motion at the IMJ as well as the technique of projecting this motion onto
structures on the same rigid body were accurate enough to deliver reasonable
results. Therefore, the applied technique constitutes a powerful measuring tool for
the dynamic behavior of structures, which are actually hidden during the experiment.
The motion direction of the reconstructed structure runs parallel to the axis of
measurement. Above 7 kHz the reconstructed displacements exceed the medially as
well as the laterally measured displacements. A possible explanation would be that
Discussion& Conclusions
123
the malleus is not a rigid body at these frequencies and that bending at the neck or
manubrium occurs. The author considers this to be rather improbable since
vibrations of the TM first reach the manubrium and, then, the malleus head. The
measured displacements of the umbo should, therefore, exceed the umbo
displacement based on IMJ-measurements; the opposite was observed. However, at
least up to 7 kHz, the reconstruction technique seems to be accurate. At higher
frequencies the data suggest differences between the reconstructed and measured
velocities.
VI.2
Explanation of findings
VI.2.1
Symmetry & linearity
The asymmetry of the umbo motion hypothesized by Helmholtz (1868), observed by
Mach & Kessel (1874) and measured by Dahmann (1930) and Kobrak (1959) was
not confirmed by the results in the present study. In the 5 temporal bones, which
were tested for umbo symmetry and linearity, the umbo symmetrically oscillated
about the point of rest at sound pressure levels from 70 to 120 dB (Fig. V.2). The
techniques applied by the above mentioned authors necessitated the use of very
high sound pressure levels in order to visualize the vibrations of the ossicular chain.
Due to its anatomical dimensions and arrangement, the annular ligament is likely to
be the structure limiting the motion of the ossicular chain (Price & Kalb, 1991). Wada
et al. (2001) found the "displacement of stapes in guinea pigs and rabbits to increase
nonlinearly with an increase in load in large displacement areas". In the case of very
high sound pressure levels, the motion of the stapes reaches a plateau which also
inhibits the motion of the incus. The cog mechanism described by Helmholtz comes
now into play, and the malleus disengages during the excursion and is decelerated
during the incursion. This causes the asymmetric motion of the malleus. Mach &
Kessel, Dahmann and Kobrak observed that the asymmetry of the ossicular motion
disappeared when the stapes was separated from the ossicular chain. The authors
all agreed that the resistance of the annular ligament of the stapes caused the
asymmetry of the ossicular chain. But as mentioned earlier, all these experiments
were performed at high sound pressure levels. The present study, which was
performed at moderate sound pressure level (70 – 90 dB) revealed no asymmetry of
the umbo motion. It can be, therefore, suggested that asymmetry in ossicular motions
only occurs at very high sound pressure levels and that it has no significance within
the physiologically relevant range of hearing.
Linearity tests were performed in seven temporal bones measuring the umbo
displacement at varying sound pressure levels from 50 to 90 dB SPL. The results
revealed no significant or systematic deviations from a linear response either under
the closed or the open MEC condition (Fig. V.5). Stimulation with the multi sine signal
limited the maximal sound pressure level (90 dB SPL). Between 70 and 120 dB SPL
the umbo displacement further shown to be symmetrical. These experiments were
performed with single tone presentations and therefore maximal sound pressure
levels of 120 dB were reached, whereas the lower limit was 70 dB SPL because the
Discussion& Conclusions
124
measurements could not be averaged due to the low signal/noise ratio at lower
sound pressure levels. Within the small range of sound pressure levels (80 – 90 dB),
at which IMJ revealed useful results, joint transmission also works in its linear range
(Fig. V.14).
The sound pressure level ranges, within which the three experiments were
performed, overlapped. Nonlinear effects were not observed in any of the three
measurements. It is, therefore, reasonable to assume that the human middle-ear
ossicles oscillate in a linear manner up to the highest sound pressure level used in
the three experiments (120 dB).
VI.2.2
Umbo displacements
Since Laser Doppler Vibrometry measurements are used in human middle-ear
research, several reports on umbo displacement or velocity measurements can be
found in the literature. At the beginning of each experiment, a baseline measurement
(umbo displacement at 90 dB SPL under the closed MEC condition) was performed
in order to acquire a measure which could be compared to umbo displacement data
provided by former studies. In figure VI.1 some data found in the literature are
compared with the baseline measurements of the present study. The latter are
represented by means and standard deviations (n=14). The data found in the
literature were adjusted in order to reflect umbo displacements at 90 dB SPL. Closed
labels (Huber 2001, n= 45; Nishihara, n=64) represent measurements that were
made on living subjects, whereas the others (Hato 2001, n=15; Vlaming 1986, n=4;
Gyo 1987, n=14) represent measurements that were made on temporal bones. The
studies of Hato, Nishihara and Gyo originate from the same laboratory (Goode R.L.,
Palo Alto and Stanford, California). Figure VI.1 shows the results of the present
study are of similar magnitude as the data reported in the literature. The data of
Vlaming & Feenstra (1986) show significantly lower displacements both at low and
high frequencies. They used deep frozen temporal bones that were stored at -20°C
for several days.
Fig.
VI.1:
Umbo
displacements at 90 dB
SPL of the present study
and data found in the
literature. Data which
were acquired at other
sound pressure levels
were adjusted. The closed
triangles and circles label
in vivo measurements, the
data labeled with crosses
and
open
symbols
represent measurements
on temporal bones.
umbo displacement at 90 dB SPL
displacement [nm]
100
10
Hato 2001
Huber 2001
1
Nishihara 1997
Vlaming 1986
Gyo 1987
present study
0.1
100
1000
frequency [Hz]
10000
Discussion& Conclusions
125
rel. deviation [dB]
displacement [nm]
Below 1 kHz the experiments performed on living subjects (Huber, Nishihara) reveal
data which almost coincide with the results of the present study, but at higher
frequencies their data show substantial differences, especially the data of Nishihara.
One difference between measurements on temporal bones and living subjects is the
angle at which the laser impinges onto the umbo. Another difficulty during
measurements in living subjects is the movement of the subject during the
measurement. Especially at high frequencies, displacements on the TM close to the
umbo are larger than those immediately above the umbo. It is likely that, during in
vivo measurements, the laser deviates from the adjusted position due to movements
of the subject or that the laser was initially not exactly positioned on the umbo.
Slight deviations can cause large variations in the recorded displacements. This is
shown as an example for one
variation in umbo displacement
temporal bone (#58) in figure
100
VI.2. The displacements of nine
points measured at 90 dB SPL
are illustrated in the upper
10
graph. The inset depicts the TM
and nine measurement points
on the umbo represented by the
1
data.
Although
the
nine
measurement points define a
small area, there is considerable
0.1
variation
in
displacement
10
between them, especially at
higher frequencies. The lower
graph illustrates the relative
0
deviations (in dB) between the
point of greatest displacement
and the other 8 points. At high
-10
frequencies, deviations of 10 dB
or more appear. Due to some
initial experiments the author
-20
was made aware of that
100
1000
10000
phenomenon from the beginning
of the study. The points of an
frequency [Hz]
umbo-scan were, therefore, not
Fig. VI.2: Umbo displacement variation in one
averaged, but one point of good
specimen (#58) measured at a sound pressure
coherence and lowest possible
level of 90 dB. The upper graph contains the
displacement amplitude was
umbo displacements of nine points and the
selected. Such a point, most
inset illustrates the position of the nine points
likely, represents the ossicular
on the TM. In the lower graph the relative
motion of the umbo, since, at
difference (in dB) between the point of greatest
the umbo, the TM is most tightly
displacement and the other eight points are
indicated. At high frequencies (> 6 kHz) these
attached to the manubrium, and
differences reach 10 dB or more.
Discussion& Conclusions
126
ossicular motion is unlikely to exceed the displacements of the surrounding TM. This
selection procedure might also be the reason for the relatively small standard
deviations of the present study compared to most other studies (explicitly at high
frequencies). It is, therefore, not surprising that results of other studies exceed the
data of the present study. It is unclear, whether the great inter-individual differences
often reported in the literature are due to the phenomenon just described, or whether
this is an additional effect that is partly responsible for the scattered data.
However, regarding the described phenomenon the data of the present study fit very
well into the data found in the literature. Due to the freezing of temporal bones, the
data of Vlaming & Feenstra (1986) should not be considered. Almost all post-mortal
changes reported by Ramirez-Garcia (1980) affected the low frequencies. The fact
that, at low frequencies, the present data coincide very well with that of living
subjects (Huber 2001, Nishihara 1997), suggests that the mechanical properties of
the temporal bones used in the present study are similar to those in the living ear.
Umbo displacement measurements at high frequencies are difficult. Due to the
motion of the subject, precise positioning of the laser beam is probably not possible.
Comparison of umbo displacement data at high frequencies between different
studies is difficult without knowledge of the exact measurement and analysis
techniques applied.
VI.2.3
Ossicular motion
VI.2.3.1 Qualitative Approach
In figure V.8 the ossicular motion is qualitatively described for one specimen (#54).
The quantitative results of this specimen were compared to those of other
specimens. No explicit differences or peculiarities were found. In addition, the motion
modes of all temporal bones were also carefully examined in the animation mode.
These comparisons suggest that the qualitative description of the dynamic behavior
of specimen #54 is representative for all temporal bones investigated.
At low frequencies (< 1.5 kHz), the ossicular chain performs a simple rotation about
an axis, which runs through the short process of the incus and the anterior process of
the malleus. At higher frequencies, the two ossicles move independently from each
other. No common rotational axis is noticeable. At these higher frequencies, the IMJ
allows relative motion between the two ossicles about the two rotational axes (ωx, ωy)
and along the translational axis (vt). Each ossicle generally performs a motion, which
involves several motion components (ωx, ωy, vt). The rotational component, as
described for the low frequencies, is present over all frequencies. Another prominent
motion mode of the incus body, at higher frequencies (3 - 6 kHz), is a rotating rocking
motion, in which the center of mass of the incus is at rest.
Due to the measurement technique available, the first mechanical investigations of
the ossicular chain were either based on static or dynamic experiments at very low
frequencies (Helmholtz, 1868; Mach & Kessel, 1874; Dahmann, 1930; Gill, 1951;
Kobrak, 1959; Kirikae, 1960). The simple rotation about an axis, which runs through
the short process of the incus and the anterior process of the malleus, was reported
Discussion& Conclusions
127
by most of them. Therefore, there is agreement on the dynamics at low frequencies.
Only very few data of dynamic ossicular motion are available at higher frequencies (>
1.5 kHz). Békésy experimentally cut the posterior incudal ligament and reported that
middle-ear transmission, at high frequencies, was not affected by this intervention.
He concluded that the incudo-malleolar complex rotated about its center of mass and
that the ligaments played a remote role at these frequencies.
Békésy's findings are in agreement with the motion modes, at higher frequencies (>
3 kHz), found in this study, where the center of mass of the malleus and incus are at
rest. The work of Decraemer & Khanna (2001), although performed in a single
specimen, delivered more detailed information about the ossicular motion at higher
frequencies, and there is no obvious conflict between their results and those of the
present study. They observed increasing motion complexity of the ossicular chain
with increased frequency and relative motion between the malleus and incus at all
frequencies. These relative motions also increased with frequency.
VI.2.3.2 Quantitative approach
By analyzing the ossicular motion quantitatively and separately for both ossicles, the
interplay of the three motion components becomes apparent. Figure V.11 illustrates
all three motion components being present in the motion of both ossicles over all
frequencies tested. The data also suggests that the three motion components of the
malleus are greater than those of the incus. This is confirmed by the transfer
functions shown in figure V.13. But, only the rotational ωy-component yields
reproducible results for its transfer function. One reason for the amplitudes of the
other two transfer functions to vary more (especially the rotational ωx-component)
and exceed by far, at certain frequencies, the value of 1.0, is the following:
Considering the suspension of the ossicles in the MEC, a simple translational motion
of the malleus head can induce a rotation of the incus body about the x axis, because
its short process is firmly anchored by the posterior ligament (not true for all
frequencies). Since the ωx-component is now mainly present in the incus but not in
the malleus, the transfer function reaches values far above 1.0. Another reason for
the inconsistency of the transfer function TFωx is the low value of this rotational
component ωx. A minimal noise level is present in all measurements, and each
motion component has its own signal-to-noise ratio. The latter decreases with the
magnitude of the motion component. The inaccuracy of the detection of the ωxcomponent might, therefore, cause the inconsistency of the transfer function TFωx.
However, in section V.3.2 the ωy-component is clearly shown to play the dominant
role in vibration transmission along the ossicular chain. In figure V.11 the two
rotational components show very similar absolute values, but the ωy-component is
boosted by the lever arms of the ossicular chain (manubrium and long process of the
incus), whereas the umbo and the LPI are very close to the x axis and do not
experience such an amplification with ωx. The displacement values of the
translational component remain constant, independent of the position on the rigid
body. It turns out that the joint transmission about the y axis almost entirely defines
Discussion& Conclusions
128
the vibration transmission between the umbo and LPI. Where the joint and ossicular
transmission deviate noticeably, one of the two other components (vt or ωx) comes
into play. This is explicitly illustrated in figure V.10 and figure V.15. In figure V.15
the TFi/u and TFωycorr deviate between 1.6 and 2.4 kHz (max. 5 dB) and between
3.6 and 5.3 kHz (max. 8 dB). Figure V.10 provides an answer: between 1.6 and 2.4
kHz the translational component (vt) is accentuated in both ossicles, and therewith
contributes a relevant portion to the ossicular motion, and between 3.6 and 5.3 kHz
the vt-component is larger in the malleus than in the incus. This loss in ossicular
transmission is not reflected in the joint transmission which only considers the ωycomponent. Although the ωy-component is the dominating motion component and the
ωx-component only plays a remote role, all three motion components seem to be
necessary in order to precisely describe the ossicular transmission.
VI.3
Related literature
As mentioned in the introduction, investigations on the functionality of the IMJ go
back to the 19th century. The dynamic behavior of the ossicular chain was first
described by Mach & Kessel in 1874, and they already considered the IMJ to be a
rather loose connection between the malleus and incus allowing relative motion
during the transmission of sound. On the one hand, the concept of a functionally
mobile IMJ was maintained till this day and several researchers confirmed Mach &
Kessel's findings by their own experiments (Dahmann 1930; Stuhlman 1937; Kobrak
1959; Harty 1964; Decraemer & Khanna 2001). On the other hand, the concept of a
functionally fixed IMJ first appeared in a publication by Frey in 1911 and was
revitalized by Bárány in 1938. The idea was supported by the Nobel price winner
Békésy (1939) and thereon, repeated by many authors such as Cancura (1976),
Brenkman & Grote (1987), Hüttenbrink (1988), just to mention a few. Rather late,
some studies experimentally confirmed the concept of a immobile IMJ (Gill 1951;
Kirikae 1960; Elpern 1965; Gundersen & Høgmoen 1976). The works of Kirikae,
Elpern and Gundersen & Høgmoen are most often cited in this context. The findings
of the present study are only contradictory to the four studies which were based on
experiments. The following two sections shall shed some light on the techniques
applied and conclusions drawn from the results acquired in these previous studies,
which experimentally "proved" the IMJ to be either functionally mobile or immobile.
VI.3.1
Contradictions to previous studies
Gill (1951) observed the ossicular chain under stroboscopic light over a relatively
broadband of frequencies (0.05 – 3.5 kHz) and reported "no movement at this joint
other than a hinge-like sliding action. Thus, when the head of the malleus moves out,
the head of the incus moves with it." Obviously Gill observed a sort of relative motion
between the malleus and incus, but did not consider it to have any influence on the
transmission of sound. However, the temporal bones used in his study were
preserved in a merthiolate solution. Merthiolate is a toxic substance with slightly
Discussion& Conclusions
129
fixative properties. The application of merthiolate might have affected the mechanical
properties of the IMJ and other soft tissue in the MEC. The use of this solution adds
an unknown parameter to Gill's results.
Kirikae (1960) used both an optical and electrical method to measure the
displacement amplitude of the malleus head and incus body. Both techniques were
rather insensitive and very high stimulation intensities were needed (140 dB SPL).
For the optical technique, Kirikae only showed data at 0.4 and 0.8 kHz in 4 cases.
For the electrical technique only a general statement is offered. It remains unclear
how many specimens were investigated and at what frequencies they were tested.
Moreover, with the electrical technique, Kirikae only measured at two points per
ossicle close to the IMJ and could not detect any displacement or phase differences.
If this statement refers to frequencies below 1 kHz and was only measured in one or
two specimens, then Kirikae's results might very well be in agreement with the
findings of the present study. But the results and experimental condition described by
Kirikae are rather unclear. There is no mention with regards to where on the malleus
and incus the measurements were performed. If it was close to the y axis, as it is
defined in the present study, his findings are not surprising. At this position the
applied technique would not deliver clear results either for phase or amplitude.
Kirikae does not mention the precise post-mortem time of the temporal bones used.
He removed both the m. tensor tympani and superior malleal ligament. The
experiments were performed at very high sound pressure levels (110-140 dB), which
are far above the range of biologically relevant sound pressure levels.
Elpern et al. (1965) experimentally fixed the IMJ and other middle-ear structures in
order to discover the possible effects of these manipulations on the sound
transmission. Thereto, they measured the volume displacement of the round window
membrane and used the sound pressure level at the TM as reference. Experimental
fixation of the IMJ caused no changes in the middle-ear sound transmission and
Elpern et al. concluded that the IMJ was already functionally immobile before the
experimental fixation. However, the results are only based on two experiments and
the success of fixation was not checked. Due to the difficulties in successful joint
fixation faced in the present study (see section V.4), the author doubts that the two
attempts of Elpern et al. to fix the IMJ were successful.
Moreover, assuming a functionally mobile IMJ, the gain in joint transmission achieved
by the experimental joint fixation might be compensated by the compliance of the
umbo. The two parameters (joint transmission and umbo compliance) strongly
depend on each other, which was experimentally shown by Dahmann (1930) and
demonstrated in a three-dimensional circuit model by Weistenhöfer and Hudde
(2000). Both the experiment and model revealed a decrease in umbo compliance
due to an increase in joint transmission by experimentally stiffening the IMJ. Since
Elpern et al. only recorded the sound pressure level at the TM and the volume
displacement at the round window, it was not possible to split those two parameters.
Therefore, the conclusions of Elpern et al. are not compelling.
Gundersen & Høgmoen (1976) used time averaged holography in order to describe
the dynamic behavior of the ossicular chain in the IMJ area. Unfortunately, they
removed parts of the semicircular canals for better visualization of the IMJ region.
Discussion& Conclusions
130
Therewith, their results cannot be applied to the functionality of the normal middle
ear. When the cochlear load is reduced or removed, the resistance at the LPI
changes. Yielding of the IMJ to a certain force in the intact ear (with cochlear load)
does not imply, that the joint also yields to the same force after the cochlea was
drained, because the resistance at the LPI differs dramatically between the two
conditions. The "additional experiment" (see section V.6) deals with the effect of the
cochlear load. The experiment was performed in order to demonstrate that the
cochlear load affects the dynamic behavior of the IMJ in a crucial way. Although, only
performed in one specimen, the experiment reveals reliable results of relative
differences between three experimental conditions. By draining the cochlea, joint and
ossicular transmission losses were reduced over the entire frequency band tested.
The results of Gundersen & Høgmoen show no difference in rotational amplitude
between the malleus and incus up to 1.5 kHz. For the drained cochlea condition this
result is in agreement with the results of the present study (Fig. V.31). After draining
the cochlea, the relative transmission losses were close to '0 dB' up to about 2 kHz. It
is, therefore, likely that the experiments of Gundersen & Høgmoen would have
revealed results similar to those in this study, if they did not drain the cochlea and if
they extended the experiment to higher frequencies.
Furthermore, the technique applied in their study had low sensitivity. The authors
report that measurements were performed between 0.1 and 10 kHz and at sound
pressure levels between 85 and 140 dB. However, they deliver results between 0.2
and 1.5 kHz at sound pressure levels between 104 and 134 dB, hence reflecting
probably the low sensitivity of the measurement technique.
Time averaged holography yields no information on phase, but just on the maximal
displacement of an object. Gundersen & Høgmoen describe a common rotational
axis of both malleus and incus up to 1.5 kHz. These findings are in agreement with
the results of this study (see section V.2.1), but Gundersen & Høgmoen conclude
that the malleus and incus functionally act as one unit. A common rotational axis is
not necessarily accompanied by a zero phase shift. In contrast to the time-averaged
holography, LDV-measurements provide information on the phase of the ossicular
motion. The data of the present study shows phase differences and also
transmission losses in the aforementioned frequency band, and phase shifts can go
along with zero transmission losses. Since Gundersen & Høgmoen used time
averaged holography and, therefore, did not have the phase information to take into
consideration, their conclusion that the both ossicles rotate as one rigid body is not
compelling.
Their paper is cited by many authors as evident proof for the functionally immobile
IMJ. The author takes the view that the fact that the cochlea was drained and the
results described the ossicular motion in a small low frequency band at nonphysiological high sound pressure levels, greatly reduces the explanatory power of
Gundersen & Høgmoen’s study. The scientific value of their study should, therefore,
be reconsidered.
Discussion& Conclusions
VI.3.2
131
Agreements with previous studies
The present study presents a highly mobile IMJ and frequency dependent
transmission properties of that joint (TF-y). These transmission properties closely
correlate with the transmission properties of the ossicular chain (TF-I/U). In the
previous section contradictions to these findings found in the literature were
discussed. The goal of this section is to show that the basic statement of the present
study, namely, that the IMJ yields to small forces of sound even at low frequencies,
has already been made more than a century ago and that this concept was
supported by the works of several researchers.
Helmholtz (1868) did not experimentally prove the mobility of the IMJ during the
transmission of sound but hypothesized it. He interpreted the joint as a kind of cog
mechanism, which disengages the malleus during its excursion, and, during its
incursion, entrains the incus forcing it to follow the incursion. His theory was first
experimentally supported by Politzer (1873), who provided the first documented
measurements of malleus and incus motion at a frequency close to 500 Hz. In his
experiments, which he performed in 1862, Politzer showed relative motion between
both ossicles and observed that, during sound transmission, vibrations of the malleus
are larger than those of the incus, and that those of the incus exceed those of the
stapes. Buck (1869) quantitatively measured the ratio between the vibration
amplitude of the malleus and incus during acoustic stimulation. He measured at 6,
110, 220 and 400 Hz. At 400 Hz, for example, Buck evaluated a ratio of 0.56 (- 5 dB)
between the head of the malleus and the body of the incus. These findings coincide
with the amplitude of the joint transfer function found in the present study at a
frequency near 400 Hz, namely at 500 Hz (see Fig. V.17).
Mach & Kessel (1874) observed the dynamic behavior of the ossicular chain under
stroboscopic light at low frequencies (256 Hz). They reported gliding in the IMJ
resulting in transmission losses between the malleus and incus. In addition, they
experimentally fixed the IMJ with wax which reduced the malleus motion by -12 dB.
In the present study the transmission properties of the joint show a low frequency tail
below about 0.9 kHz. It is, therefore, justifiable to assume that transmission
properties remain more or less stable below that frequency, and that results obtained
in former studies, at frequencies below 0.5 kHz, can be compared to those of the
present study between 0.5 and 0.9 kHz. In seven specimens, for which the IMJ
fixation was considered to be successful, the umbo displacement was reduced by 3.6 dB (± 1.9 dB) between 0.5 and 0.9 kHz. In all seven specimens the fixation of the
IMJ caused a reduction in umbo displacement, but not to the degree reported by
Mach & Kessel. This might be due to the high sound pressure level applied in the
experiment by Mach & Kessel (not indicated but obvious when ossicular motions
become visible). At very high sound pressure levels the annular ligament might work
outside its linear range and inhibit the stapes motion. In the case of a mobile IMJ the
malleus is partially decoupled from the incus and stapes, whereas, after fixation, the
high resistance of the annular ligament also affects the motion of the malleus. In
other words, the joint and ossicular transmission losses in the intact ear might be
greater at very high sound pressure levels than at moderate sound pressure levels
Discussion& Conclusions
132
such as those used in the present study. Consequently, the effect from joint fixation
is stronger at high than at moderate sound pressure levels. However, Mach &
Kessel’s description of the ossicular motion in the normal ear are in agreement with
the findings of the present study.
Dahmann (1929, 1930) studied the dynamics of the middle-ear ossicle in detail by
observing the light patters deflected by small mirrors which were mounted on the
ossicles. According to Dahmann, the IMJ partly inhibits the transmission of force
along the ossicular chain. He assumed that the function of the lever action is to
compensate for that transmission loss caused by the joint mobility. Dahmann
performed his experiments on fresh temporal bones (within 24 hours post mortem),
by preserving the inner ear and all middle-ear structures. In his experiments with
static as well as dynamic pressure variations, he found the motion of the malleus to
exceed that of the incus. Moreover, Dahmann discussed the problem of the
elbowroom of the stapes (see end of last section). He assumed that the IMJ yields to
forces of impinging sound only when the resistance at the LPI is greater than the
resistance of the fibrous articular capsule of the IMJ. Because of a compromissive
nonlinearity in the annular ligament, the stapes motion is limited at high stimulus
levels, with the result that the resistance at the LPI increases with sound intensity in a
non-linear fashion. Therefore, Dahmann assumed that the incudo-malleolar complex
only behaves as a rigid body at low sound pressure levels and that relative motions
between the malleus and incus first appear at higher (but still physiological) sound
pressure levels.
Kobrak (1959) used the same technique as Dahmann but placed the mirrors on the
head of the malleus and the body of the incus close to the IMJ, and only applied
static pressures. Kobrak pointed out that the IMJ was a loose connection between
the malleus and incus. In addition to the static pressure experiments, Kobrak
analyzed a series of moving pictures he recorded during dynamic stimulation
(sound). In both experiments Kobrak found larger displacements for the malleus than
for the incus. His observations during dynamic stimulation revealed that the incus
lags behind the malleus. Sound pressure levels and stimulation frequencies were not
indicated, but the technique applied implies the use of high sound pressure levels (>
100 dB) at low frequencies (< 100 Hz).
Harty (1964) did not directly investigate the dynamic behavior of the middle-ear
ossicles but had a close look at the anatomy of the IMJ. Harty found that, at the level
of the joint line, the IMJ capsule was exclusively made up of elastic tissue. Due to his
anatomical investigations, he concluded that the "movements at this joint are
essentially rotary on an antero-posterior axis, which passes through the short
process of the incus and the anterior process of the malleus." He saw his hypothesis
confirmed by Kobrak’s observations. In order to prevent both ossicles from
separating, which would cause distortions during the transmission of sound, the
elastic capsule held the articular surfaces in intimate contact and only allowed sliding
between both ossicles.
After Gundersen & Høgmoen (1976) it took about 30 years until an experiment
revealed further insights in the dynamic behavior of the IMJ. The leap in time concurs
in the subtlety of applied technique. Multidirectional laser Doppler measurements in
Discussion& Conclusions
133
combination with high resolution and three-dimensional anatomical data allowed
Decraemer & Khanna (2001) to animate the dynamic motion of the entire ossicular
chain. Although just based on one specimen his work provides a very illustrative
picture on the possible dynamic behavior of the ossicular chain. One observation
Decraemer points out, is namely that there was "a substantial amount of slippage
between malleus and incus even at very low frequencies." The same observation
was made in both ears of the donor.
Most experimental studies described in this section dealt with the dynamic behavior
of the IMJ and, they all concluded that relative motion in the IMJ occurred during
sound transmission. The reported relative transmission losses in normal middle ears,
evaluated in some studies, are similar to the transmission losses at low frequencies
described in the present study.
VI.4
Middle-ear sound transmission
The most prominent characteristic of joint transmission found in the present study is
the abrupt loss in transmission between 1 and 3 kHz. Increasing inefficiency of
middle-ear transmission above 1 kHz was reported by several studies (Kringlebotn &
Gundersen 1984, Goode et al. 1994, Vlaming & Feenstra 1986, Gyo et al. 1987,
Ramirez-Garcia 1980, Kurokawa & Goode 1995, Hato et al. 2001). All experiments
were performed on temporal bones and measurements were made at the umbo,
stapes footplate or round window membrane. The sound pressure level at the TM
was used as a reference. None of the experiments involved measurements at the
LPI. The authors were mainly focusing on middle-ear sound transmission measuring
either stapes footplate or round window membrane displacements.
The roll-off (dB/octave) above 1 kHz found and reported in these studies as well as
the results of the present study are listed in table VI.1. As mentioned earlier in this
chapter the study of Vlaming & Feenstra was performed on temporal bones that were
first frozen and thawed, and therefore, their results are not considered here.
Considering the high variability of temporal bone measurements the coherence of the
results is extremely good. The reported umbo displacement roll-off is between -8 and
-9 dB/octave. Since compressibility of the cochlear fluid is negligible, it is rational to
assume similar results for sound transmission to the stapes and round window. The
collected data confirms and reveals a middle-ear transmission roll-off of -14.5
dB/octave (±1.0 dB). The resulting transmission roll-off between the umbo and stapes
is -4.2 to -6 dB/octave. Relative to the umbo, displacement measurements of the LPI
in the present study reveal a roll-off of -5.5 dB/octave. Assuming that the results of
Gyo et al. (1987), Goode et al. (1994) and the present study are correct, no or only
minor transmission losses result from slippage on the incudo-stapedial joint, whereas
additional transmission losses of about -5.5 dB/octave are caused by the IMJ.
Figure V.16 in section V.3.2 clearly shows that ossicular transmission correlates
closely with joint transmission. The collection of various data presented in table VI.1,
therefore, reveals the contribution of various structures to middle-ear transmission
roll-off above 1 kHz. The contribution of the IMJ to this roll-off is about -5.5
Discussion& Conclusions
134
Ramirez-Garcia
1980
Kringlebotn &
Gundersen 1984
Gyo et al. 1987
-9 dB
present study
2003
-9 dB
Goode et al. 1994
SPL-umbo
Kurokawa 1995
Hato et al. 2001
dB/octave. An interesting comparison to the present study is offered by the data
acquired from anesthetized cats by Møller (1963). He measured displacements of
middle-ear ossicles and the round window membrane. He found the amplitude of the
cochlear fluid motion to be independent of frequencies up to 0.7 kHz. Above 1 kHz it
fell at a rate of approximately 12 dB/octave. Guinan & Peake (1967) observed very
similar transfer characteristics in anesthetized cats. In addition, they reported that
both the stapes and LPI lag the malleus. They considered the IMJ to be the most
attractive candidate for causing this lag. The frequency response of the middle-ear
transfer function, that Guinan & Peak and Møller measured, coincides with the
findings reported in the aforementioned studies and the present study, both based on
human temporal bones. According to section VI.1 this again supports the
assumption that temporal bone measurements reflect the properties of the living ear.
-9 dB
-8.5 dB
SPL-LPI
SPL-stapes
-14 dB
-13.2
-13.6 dB
-15 dB
SPL-rw
-14 dB
-15 dB
-16 dB
umbo-LPI
umbo-stapes
-5.5 dB
-4.2 dB
-6 dB
-5 dB
Tab. VI.1: Roll-offs (dB/octave) of several measurements above 1 kHz reported by 5
former studies in comparison to the concerning results of the present study.
Displacement measurements were performed at the umbo, the LPI, the stapes and
the round window (rw). The sound pressure level (SPL) at the TM served as a
reference. The relative transmission such as between umbo and LPI, and between
umbo and stapes were calculated based on these measurements.
Another finding by Gyo et al. (1987) shows remarkable congruence with the present
study. They measured the middle-ear sound transmission with and without the
cochlear load. Below 1 kHz the lever ratio was slightly reduced after drainage of the
cochlear fluid, and the rapid increase of the lever ratio above 1 kHz, that appeared
when the cochlea was still intact, disappeared. A reduction in the lever ratio is
equivalent to an increase in transmission. Their findings are exactly reflected by the
ossicular transmission evaluated before and after draining the cochlea (Fig. V.31).
Discussion& Conclusions
VI.5
135
Fixation of the IMJ
Experimental fixation of the IMJ turned out to be much more difficult than initially
expected. Fortunately, the quality of fixation could be checked immediately after
fixation, and, in case of failure, the procedure was repeated. Nevertheless, proper
fixation only succeeded in 7 out of 14 specimens. The discussion of the following
sections considers only the 7 temporal bones, in which the IMJ fixation succeeded.
VI.5.1
Effect of IMJ-fixation
Observing the three motion components involved in joint transmission, the effect of a
successful joint fixation is straightforward. Joint transmission losses reach '0 dB' in
the optimal case (Fig. V.20). However, this is different for the ossicular transmission:
The losses in ossicular transmission are reduced but even at low frequencies
residual transmission losses remain (Fig. V.21). Ossicular transmission depends on
the three-dimensional anatomy of the ossicular chain, the suspension of the latter in
the MEC and the resulting motion modes. Since the rotation around the y axis
constitutes the dominant motion component, and since the distance between the
umbo and this axis is larger than for the LPI, a lever ratio operates. This lever ratio
already operated before joint fixation, but was obscured by the transmission losses at
the IMJ. The mean anatomical lever ratio measured from the direction of the laser
head was 1.19 (± 0.1). The mean ossicular transmission loss remaining after joint
fixation below 1 kHz equals -1.6 dB. By the lever ratio the ossicular chain looses -1.5
dB in displacement, which almost entirely explains the remaining transmission losses
after joint fixation. In general, it can be stated that after fixation both the joint and
ossicular transmissions experience a gain, which equals the joint transmission losses
before fixation. The frequency response of the ossicular transmission after IMJ
fixation (Fig. V.21) suggests that only minimal ossicular transmission losses would
occur in a three-ossicle ear, which exhibits a functionally fixed IMJ.
The effects of fixation on sound transmission are more complex. In addition to
ossicular transmission, sound transmission depends on the sound-induced
displacement of the umbo, which is highly dependent on the mass and stiffness of
the TM and the ossicular chain. It was early observed by Mach & Kessel (1874) and
Dahmann (1930) that experimental fixation of the IMJ reduces the compliance of the
umbo. Much later, this was demonstrated by Weistenhöfer and Hudde (2000) on the
basis of a three-dimensional circuit model. Umbo displacements were reduced by
stiffening the IMJ. In the normal middle ear the malleus and incus are loosely coupled
so that stiffness and mass of both the incus and more proximal structures influence
the dynamics of the malleus only remotely. When the malleus and incus are coupled
to one rigid body, the additional mass and stiffness of the incus directly affect the
forces acting on the umbo. Moreover, contribution of the impedance of the cochlea,
annular ligament and stapes on umbo displacement is increased by joint fixation.
Therefore, fixation of the IMJ does not boost sound transmission to the same degree
as it does ossicular transmission. Ossicular transmission gain is partly compensated
by an increased load on the umbo. The right graph in figure V.24 reveals no sound
Discussion& Conclusions
136
transmission gain after joint fixation below 1.5 kHz, although the ossicular
transmission was enhanced. At higher frequencies sound transmission experiences
an increasing gain with frequency and reaches about 10 dB at 10 kHz. The increase
in ossicular transmission achieved by the fixation of the IMJ is balanced by the
reduction in umbo motion also induced by the fixation.
VI.6
Possible IMJ function
Substantial transmission losses caused by the mobility of the IMJ at high
frequencies, as reported in the present study, raise the question about the function of
the IMJ. There are two middle-ear muscles, which exert stress on a middle-ear joint:
The tensor tympani compresses the articular faces of the IMJ, and the stapedius
dislocates the incudo-stapedial joint. It is likely that contractions of these muscles
affect sound transmission to the inner ear. By contracting they probably both
increase the stiffness of the middle ear, thereby increase its impedance and reduce
sound transmission, especially at low frequencies. At a first glance, the presence of a
joint seems to be essential for the function of muscles. Interestingly, a functional joint
is not present in all mammals. A bony fusion between the malleus and incus in
guinea pigs was reported by Kobayashi (1955) and Dallos (1973). Nevertheless,
guinea pigs possess a tensor tympani. However, this does not necessarily prevent
the function of the tensor tympani. By its contracting, the TM and elastic ligaments of
the malleus and incus can still be stressed and increase the impedance of the middle
ear. In the presence of a functionally mobile IMJ, the action of the tensor tympani
might be more efficient, but its absence in guinea pigs does not suggest that the
tensor tympani is useless in this species.
In can be expected that the guinea pig is not the only mammal that presents a
functionally immobile IMJ (Fleischer 1973 and 1978, Frey 1911, Hinchcliffe 1969,
Kobayashi 1955), but it is best reported for that animal and, in addition, a lot of data
about the physiology of the guinea pig is available. One prominent difference
between the hearing threshold of humans and guinea pigs resides in the high
frequencies. Compared to humans high frequency hearing is much more pronounced
in guinea pigs (also true for many other small animals) and the anatomical correlative
to this might be the bony fusion of the IMJ. The present study demonstrates high
frequency transmission losses due to the functional mobility of the IMJ in humans.
The bony fusion of the IMJ might constitute an adaptation to high frequency hearing
by regaining sound transmission at high frequencies. The author does not argue that
a functionally immobile IMJ is essential for good hearing at high frequency, but if the
usual function of a mobile IMJ, whatever it may be, has minor relevance for certain
species and high frequency hearing is essential, then stiffening of the IMJ becomes
an option. Henson (1974) suggests that many mammals, especially rodents and
others that depend on high-frequency hearing have a fused IMJ.
A defined function of the IMJ can not be deduced from the findings of the present
study, but one possible function can be excluded. The fact that the mobility of the IMJ
only causes losses in sound transmission and no explicit advantage in hearing
Discussion& Conclusions
137
performance, suggests that it was developed for other purposes. Some protective
mechanism, that prevents inner ear and middle-ear damage at very high sound
pressure levels or static pressures, is still very probable. Apparently, this function can
not be fulfilled without the side effects of sound transmission losses at high
frequencies.
The fixation experiment showed no effect on sound transmission at low frequencies,
although transmission losses occurred at these frequencies in the normal IMJ. This
indicates that the IMJ constitutes a highly efficient structure enabling, on the one
hand, protection of the ear by yielding to large forces exerted on it and, on the other
hand, minimizing sound transmission losses. The capsule of the IMJ is mainly
composed of elastic tissue (Harty 1953, Davis 1948). At low frequencies the elastic
fibers of the joint capsule store and release energy very efficiently. However, at
higher frequencies (> 1.0 kHz) this efficiency drops and sound transmission losses
cannot be averted. These are only theoretical considerations, but the results of the
fixation experiments and some visco-elastic properties of elastic biological tissue
(Fung 1993) allow such an interpretation.
VI.7
The effect of age
The large variation in age among the donors demanded the screening for possible
age effects in the dynamics of the middle ear. But the author was mainly motivated
by a publication by Glorig & Davis (1961). They reported substantial age-related
conductive hearing loss. They further showed that age-related conductive hearing
loss increased with frequencies. Between the age of 20 and 80 their data revealed
conductive hearing losses of about -6 dB at frequencies of 0.5 and 1 kHz, -20 dB at 2
kHz and almost -40 dB at 4 kHz. The conductive hearing loss was defined by the airbone gap measured in the non-noise exposed volunteers. Glorig & Davis concluded
that these conductive hearing losses are due to age-related changes in the middle
ear. Indeed, in the present study an age-related transmission loss was observed. The
effect was greater for high than for low frequencies. But the correlations are week
and the group of young donors is very small. Moreover, the investigations of the
present study did not involve structures such as the incudo-stapedial joint, stapes
and annular ligament, which might indeed undergo age-related changes. Gussen
(1969) reported that the first superficial calcifications of the annular ligament in
humans as a consequence of abrasion already appeared in the third decade.
Therefore, aging might have a greater effect on the mechanical properties of the
annular ligament than on the middle-ear joints. Etholm & Belal (1974), for example,
examined the middle-ear joints of 55 donors (audiograms available). The various
pathological changes, sometimes even bony fusions between the malleus and incus,
did not affect sound transmission in the middle ear. However, the assumption that
middle-ear structures undergo age-related changes is rational. All other joints in the
body undergo degenerative changes with advancing age. Age-related changes in the
mechanical properties of biological tissues can be gleaned from the study by
Yamada (1970). All tissues tested showed a decrease in strength with age.
Discussion& Conclusions
138
One major problem when extracting age-related effects is the fact, that pathological
changes are more frequently found in older subjects. The increased scattering of the
data with advanced age is also evident from the data presented by Kringlebotn &
Gundersen (1985) and from figure V.28 of the present study. Another possibility that
must be considered is the small availability of young donors (2 donors < 40 years). If
more young donors would have been available, the scatter might have become age
independent and age related transmission effects might have disappeared. Although
there are reasons why scatter can increase with advanced age, this possibility can
not be excluded.
Glorig & Davis attempted to exclude subjects with noise induced hearing loss, but
there is no guarantee that cases with pathological changes were not included in the
study. Pathological changes in the middle ear might increase as well as decrease the
sound transmission properties of the middle ear. Because of this inherent variability,
± 5 dB, and poor frequency resolution, 1 point/octave, conventional audiometry may
not be the proper technique to investigate age effects. Laser-Doppler vibrometry may
be a more powerful technique for determining how age affects sound transmission
through the middle ear. The results presented here suggest that middle-ear
transmission decreases with age with more pronounced effects at higher
frequencies. However, because of the large inter-individual differences and the large
scattering with advanced age, a much larger test group is required in order to answer
this question. In addition, it would be necessary to involve stapes measurements to
provide an overall picture of age effects on middle-ear sound transmission.
Discussion& Conclusions
VI.8
139
Conclusions
Due to the results obtained from the present study and the critical evaluation of their
accuracy and validity, the following conclusions can be drawn:
1. The measurement and analysis techniques applied in this study reveal precise
and reproducible results. The auxiliary means used to increase the quality of
the measurements did not alter the mechanical properties of the middle ear.
2. The temporal bones used in this study were fresh and changes in the
mechanical properties due to storage, dehydration, freezing and thawing can
be excluded. Baseline measurements (umbo displacements) even suggest
that the mechanical properties of the middle ears examined in the temporal
bones are similar to those in living ears.
3. Reconstructing displacements of structures, which are not accessible during
the measurement (umbo, LPI), but that are part of the same rigid body
(malleus, incus), reveals accurate results. It, therefore, provides a powerful
technique for the evaluation of middle-ear transfer functions by being
minimally invasive. Hence, the inner ear and all relevant middle-ear structures
can be preserved.
4. The middle ear operates within its linear range and oscillations are
symmetrical up to 120 dB.
5. From the present study the following insights can be obtained concerning the
dynamic behavior of the ossicular chain: At low frequencies (< 1 kHz) the
malleus and incus rotate about a common rotational axis, which passes
through the short process of the incus and the anterior process of the malleus.
This axis is close to the virtual y axis as it was defined in the present study. At
higher frequencies the complexity of motion patterns performed by the two
ossicles increases. All three motion components (vt, ωx, ωy) contribute to the
ossicular motion and the amount of contribution of each component is
frequency dependent. The dominating motion component (except for some
small frequency bands) is the ωy-component. The IMJ becomes highly flexible
and allows both ossicles to move more or less independently from each other.
6. Small but detectable transmission losses (~-5 dB) in the IMJ occur even at low
frequencies (< 1 kHz). At higher frequencies (> 1 kHz) these losses increase
as well as the phase difference between the two ossicles. A rapid drop in
transmission occurs between 1 and 3 kHz. Above 3 kHz the transmission
losses are more or less stable, frequency-independent and show values
between -10 and -20 dB. Qualitatively, all three middle-ear transmissions
(joint, ossicular and sound transmission) show similar characteristics.
Discussion& Conclusions
140
7. Sound transmission losses caused by the mobility of the IMJ were evaluated
by experimentally fixing the IMJ. This procedure succeeded in 7 out of 14
temporal bones. From these experiments one can conclude that sound
transmission at frequencies below 1.5 kHz is not affected by the rigidity of the
IMJ. Whereas, at higher frequencies (> 1.5 kHz), joint mobility causes
increasing sound transmission losses with frequency, which reach about -10
dB at 10 kHz.
8. The question as to whether sound transmission through the middle ear
depends on age was not clearly answered in this study. However, a tendency
was observed suggesting that sound transmission decreases with advancing
age at higher frequencies, which is consistent with the findings of Glorig &
Davis (1961).
9. No correlation was found between the type of transmission through the middle
ear (joint, ossicular or sound transmission), gender of the donor or post
mortem time.
The theory of the IMJ being immobile during the transmission of sound can be
rejected. The IMJ is mobile at any frequency (0.5 - 10 kHz) tested, and the linearity of
the umbo displacement between 50 and 90 dB SPL suggests that the transmission
losses are constant within this range of sound pressure levels.
Motion patterns of the ossicular chain are complex at higher frequencies. Common
rotational axes of the malleus and incus are not noticeable anymore. The
transmission characteristics of the ossicular chain can not, therefore, be explained by
a frequency dependent position of a common rotational axis. The anatomical lever
ratio of the incudo-malleolar complex operates at low frequencies (< 1 kHz), but it is
obscured by the substantial transmission losses of the IMJ at higher frequencies.
In order to constitute a powerful tool for the development of middle-ear prostheses
and the comprehension of various pathological changes in the middle ear, virtual
middle-ear models should introduce an IMJ with elastic properties and joint
transmission characteristics as described in the present study.
The question, as to what the function of the IMJ entails, was not answered in the
present study, but due to the fact that the IMJ mobility inhibits sound transmission
through the middle ear at high frequencies, it can be suggested that this structure
was developed for purposes other than optimizing sound transmission. A protective
mechanism, which prevents damage to the inner or middle ear at very high sound
pressure levels or static pressures, as often proposed, is still very probable.
141
Chapter VII
VII
Future work
VII.1
Complete middle-ear transmission
The present study investigated the ossicular transmission of the middle ear in detail
but only two middle-ear ossicles, the malleus and the incus were involved in the
analysis. It is difficult if not impossible to measure stapes footplate motion with a
similarly noninvasive approach. The stapes is connected to the incus by the incudostapedial joint, and stapes motion can be deduced from measurements on the incus.
The IMJ showed a linear behavior between 80 to 90 dB SPL and the linearity of the
umbo (50 – 90 dB) which involves the motion of an ossicle being part of this joint
suggests that the IMJ moves in a linear manner within the same sound pressure
range (50 – 90 dB). It is likely that the incudo-stapedial joint also operates within its
linear range at moderate sound pressure levels. The relative motion between the
stapes and the incus could therefore by evaluated in a more invasive study. Stapes
and incus motions could be measured through a TM perforation. The results could be
used to complete the data obtained in the present study. A complete middle-ear
transmission could be evaluated and sound transmissions from the TM to the
entrance of the cochlea could be calculated.
These measurements could have been performed in addition to the presented
measurements in the same temporal bones. Unfortunately these considerations were
not made from the beginning of the thesis and the study was focused on the
dynamics of the IMJ. However, the present study provides valuable data for the
partial comprehension of the ossicular transmission and new data can expand the
picture.
VII.2
Age effects
As mentioned in the discussion the number of specimens used in the present study
(27) is obviously too low to reveal conclusive results about possible age effects. If
additional measurements on temporal bones are going to be made as proposed in
the last section, more data of IMJ measurements will be available. Especially in the
young age group the number of available temporal bones was small. More data from
this age group would indicate whether the large scattering observed in the older age
group is age dependent or not.
Future work
VII.3
142
Function of IMJ
The study succeeded in developing a minimally invasive technique for the evaluation
of the ossicular transmission. The same technique could be applied to investigate the
functionality of the middle-ear muscles. Static forces could be applied to the tendons
of the two middle-ear muscles and the changes in joint, ossicular and sound
transmission evaluated. Such experiments would indicate to which degree these
muscles inhibit transmission through the middle ear.
Another interesting approach to this issue would be a comparative study. Some
animals secondarily lost the mobility of the IMJ (guinea-pigs). In these animals the
malleus and incus continuously coadunate during postnatal development until they
are finally fused to one unit. Measuring the joint and the sound transmission in
animals of different age would reveal the functional purpose of this secondary fusion.
More animals are known to show ankylosis between the malleus and incus. A
comparative study involving several species of which one part shows the ankylosis
and the other part presents a mobile IMJ would be another possible approach in
order to comprehend the function of this middle-ear joint.
VII.4
Clinical interest
It was experimentally shown that sound transmission at higher frequencies can be
significantly improved by fixation of the IMJ. The opportunity to gain sound
transmissions of about 10 dB in the frequency range between 3 and 10 kHz draws
the attention of anybody interested in improving hearing in hearing impaired people.
But such considerations are very theoretical and clinical application is impossible as
long the purpose of this joint is not known. If the mobile IMJ fulfills an essential
physiological task the loss of this mobility by a surgical intervention would be
unethical. But once its function is known and its physiological meaning understood
the IMJ might gain in importance for hearing improvement.
143
Appendix
Abbreviations & Explanations
AEEC:
IMJ:
LDV:
LPI:
LSDV:
MEC:
SPL:
TF:
TM:
Ulat:
Umed:
Urecon:
artificial external ear canal
incudo-malleolar joint
Laser Doppler Vibrometry
lenticular process of incus
Laser Scanning Doppler Vibrometry
middle ear cavity
sound pressure level
transfer function, transmission
tympanic membrane
laterally measured umbo displacement
medially measured umbo displacement
reconstructed umbo displacement
The virtual coordinate system:
The three-dimensional virtual coordinate
system is aligned with anatomical
landmarks. Notation and polarity of each
axis are consistent with these landmarks.
TFjoint
Joint transmission:
Exemplified for the motion
component 'ωy'. Amplitude of
transfer function is given by:
TFjointy = IωyII / IωyMI
Three degrees of freedom:
Due to the measurement direction of the
laser (in line with z axis) three degrees of
freedom result, one translation (vt) and two
rotations (ωx, ωy).
TFoss.
Ossicular transmission:
Portion of velocity amplitude
transmitted from the umbo to
the LPI, given by:
TFoss. = IVLPII / IVumboI
TFsound
Sound transmission:
Velocity of the LPI at 90dB
SPL at the TM:
TFsound [m/s]
144
References
Abel EW et al., 2003. Finite-element modeling the reconstruction of the ossicular
chain with an anatomically shaped incus prosthesis. Abstract. The 3rd symposium
on middle ear mechanics in research and otology. pp. 11
Akeson WH, Woo SL, Amiel D, Frank CB, 1984. The chemical basis of tissue repair.
In: Hunter LY, Funk FJ (eds.). Rehabilitation of the injured knee. St. Louis: Mosby.
pp. 93-104
Allin EF, 1975. Evolution of the mammalian middle ear. J Morphol. 147. pp. 403-438
Allin EF and Hopson JA, 1992. Evolution of the auditory system in synapsida
("mammal-like reptiles") as seen in the fossil record. In: Webster DB, Fay RR,
Popper AN (eds). The evolutionary biology of hearing. New York: Springer-Verlag
pp. 587-614
Bárány E, 1938. A contribution to the physiology of bone conduction. Acta
Otolaryngol (Suppl). 26.
Beer HJ et al., 1999. Modeling of components of the human middle ear and
simulation of their dynamic behavior. Audiol Neurootol. 4 (3-4). pp. 156-162
Békésy G, 1939. Über die mechanisch akustischen Vorgänge beim Hören. Acta
Otolaryngol. 27. pp. 281-296, 388-396
Békésy G, 1941. Über die Messung der Schwingungsamplitude der Gehörknöchelchen mittels einer kapazitiven Sonde. Akust Z. 7. pp. 1-16
Békésy G, 1960. Experiments in Hearing. New York: McGraw Hill
Bolt JR and Lombard RE, 1992. Nature and quality of the fossil evidence for otic
evolution in early tetrapods. In: Webster DB, Fay RR, Popper AN (eds). The
evolutionary biology of hearing. New-York: Springer-Verlag
Bornitz M et al., 1994. Identification of parameters for the middle ear model. HNO
(Berlin). 42. pp. 754-759
Brenkman CJ and Grote JJ, 1987. Acoustic transfer characteristics in human middle
ears studied by SQUID magnetometer method. J Acoust Soc Am. 82 (5). pp.
1646-1654
Brunner G, 1870. Beiträge zur Antomie und Histlogie des mittleren Ohres.
Habilitationsschrift. Leibzig
Buck AH, 1869. Untersuchungen über den Mechanismus der Gehörknöchelchen.
Arch Augen Ohrenheilkd. 1. pp. 121-136
Caiazzo AJ and Tonndorf J, 1978. Ear canal resonance and temporary threshold
shift. Otolaryngol. 86 (5). pp. ORL-820
Cancura W, 1976. Über das Schwingungsverhalten des Amboss-SteigbügelGelenkes. Laryngol Rhinol Otol. 55. pp. 16-21
Cancura W, 1980. On the statics of malleus and incus and on the function of the
malleus-incus joint. Acta Otoaryngol. 89. pp. 342-344
Dahmann H, 1929. Zur Physiologie des Hörens; experimentelle Untersuchungen
über die Mechanik der Gehörknöchelchenkette, sowie über deren Verhalten auf
Ton und Luftdruck. Kongressbericht "zur Physiologie des Hörens" (S ds Z). 24. pp.
462-497
References
145
Dahmann H, 1930. Zur Physiologie des Hörens; experimentelle Untersuchungen
über die mechanik der Gehörknöchelchenkette, sowie über deren Verhalten auf
Ton und Luftdruck. Z Hals Nasen Ohrenheilkd. 27. pp. 329-367
Dallos P, 1973. The auditory periphery, biophysics and physiology. Academic Press
Davies DV, 1948. A note on the articulations of the auditory ossicles and related
structures. J Laryngol Otol. 61 (1). pp. 553-536
Decraemer WF et al., 1991. Malleus vibration mode-changes with frequency. Hear
Res. 54. pp. 305-318
Decraemer WF et al., 2001. Complete 3-dimensional motion of the ossicular chain in
a human temporal bone. Abstract. Proceedings of Twenty-fourth Annual Research
Meeting of the Association for Research in Otorhinolaryngology. 24. pp. 221
Doran A, 1876. Morphology of the mammalian ossicula auditus. Trans Linn Soc, 2nd
Ser, Zool. 1. pp. 371
Drescher J et al., 1998. Finite-element modeling and simulation of the human
tympanic membrane. HNO (Berlin). 46 (2). pp. 129-134
Elpern BS et al., 1965. Experimental studies on sound transmission in the human
ear. Acta Otolaryngol. 60. pp. 223-230
Etholm B and Belal A, 1974. Senile changes in the middle ear joints. Ann Otol. 83.
pp. 49-54
Fischler H et al., 1967. Dynamic response of middle-ear structures. J Acoust Soc
Am. 41. pp. 1220-1231
Fleischer G, 1973. Studien am Skelett des Gehörorgans der Säugetiere,
einschliesslich des Menschen. Säugetierkundl Mitteil. München: 21. pp. 131-239
Fleischer G, 1978. Evolutionary principles of the mammalian middle ear. Adv in Anat
Embryol and Cell Biol. 55 (5). pp. 1-67
Frank O, 1923. Die Leitung des Schalles im Ohr. Sitzungsber Bayer Akad Wiss Math
Naturwiss Kl. 11. pp. 11-77
Frey H, 1911. Die physiologische Bedeutung der Hammer-Ambossverbindung. Pflüg
Arch. 139. pp. 548
Fumagalli Z, 2003. Morphological research on the sound-transmission apparatus.
Arch Ital Otol Rhinol Laryngol (Suppl). 60. pp. 323
Fung YC, 1993. Biomechanics: Mechanical properties of living tissue. New-York:
Springer-Verlag
Gerhardt KJ et al., 1987. Ear canal volume and variability in the patterns of
temporary threshold shifts. Ear and Hearing. 8 (6). pp. 316-321
Gill NW, 1951. Some observations on the conduction mechanism of the ear. J
Laryngol. pp. 404-413
Glorig A and Davis H, 1961. Age, noise and hearing loss. Ann Otol. 70. pp. 556-571
Goode RL et al., 1993. Measurement of umbo vibration in human subjects - Method
and possible clinical applications. Am J Otol. 103 (5). pp. 565-569
Goode RL et al., 1994. New knowledge about the function of the human middle ear:
Development of an improved analog model. Am J Otol. 15 (2). pp. 145-154
Gosline JM and French CJ, 1979. Dynamic mechanical properties of Elastin.
Biopolymers. 18 (8). pp. 2091-2103
References
146
Graham MD et al., 1978. Human tympanic membrane-malleus attachment.
Preliminary study. Ann Otol Rhinol Laryngol. 87 (3). pp. 426-431
Guinan JJ and Peake WT, 1967. Middle ear characteristics of anesthetized cats. J
Acoust Soc Am. pp. 1237-1261
Gundersen T and Høgmoen K, 1976. Holographic vibration analysis of the ossicular
chain. Acta Otolaryngol (Stockh). 82. pp. 16-25
Gussen R, 1969. The stapediovestibular joint: normal structure and pathogenesis of
otosclerosis. Acta Otolaryngol (Suppl). 248.
Gyo K et al., 1987. Measurement of the ossicular vibration ratio in human temporal
bones by use of a video measuring system. Acta Otolaryngol (Stockh). 130. pp.
87-95
Harty M, 1953. Elastic tissue in the middle-ear cavity. J Laryngol Otol. 67. pp. 723729
Harty M, 1964. The joints of the middle ear. Z Mikroskop Anat. 71. pp. 24-31
Hato N et al., 2001. Acoustic role of the buttress and the posterior incudal ligament in
human temporal bones. Otolaryngol Head Neck Surg. 124. pp. 274-278
Heffner RS and Heffner HR, 1992. Evolution of sound localization in mammals. In:
Webster DB, Fay RR, Popper AN (eds). The evolutionary biology of hearing. pp.
691-715
Heiland KE et al., 1999. A human temporal bone study of stapes footplate
movement. Am J Otol. 20 (1). pp. 81-86
Hellström P, 1993. The relationship between sound transfer function from the free
sound field to the eardrum and temporary threshold shift. J Acoust Soc Am. 94 (3).
pp. 1301-1306
Helmholtz H, 1868. Die Mechanik der Gehörknöchelchen und des Trommelfells.
Pflüg Arch. 1. pp. 1-60
Henson OW, 1974. Comparative anatomy of the middle ear. In: Keidel WD, Neff WD
(eds). Handbook of sensory physiology: The auditory system V/1. New-York:
Springer-Verlag pp. 39-110
Hinchcliffe R and Pye A, 1969. Variations in the middle ear of the mammalia. J
Zool (London). 157. pp. 227-288
Huber A et al., 2001. Evaluation of eardrum laser Doppler interferometry as a
diagnostic tool. Laryngoscope. 111. pp. 501-507
Hudde H, 1998. Measuring and modeling basic properties of the human middle ear
and ear canal. Part I: Model Structure and Measuring techniques. Acustica. 84. pp.
720-738
Hudde H, 1998. Measuring and modeling basic properties of the human middle ear
and ear canal. Part II: Ear canal, middle ear cavities, eardrum, and ossicles.
Acustica. 84. pp. 894-913
Hudde H, 1998. Measuring and modeling basic properties of the human middle ear
and ear canal. Part III: Eardrum impedances, transfer functions and model
calculations. Acustica. 84. pp. 1091-1109
Hüttenbrink K B, 1988. The mechanics of the middle ear at static air pressures. Acta
Otolaryngol. 451. pp. 1-36
References
147
Jahn G, 1960. Über den Unterschied zwischen den Kurven gleicher Lautstärke in der
ebenen Welle und im diffusen Schallfeld. Hochfrequenztechn u Elektroakust. 69.
pp. 75-81
Kato T, 1913. Zur Physiologie der Binnenmuskeln des Ohres. Pflüg Arch ges
Physiol. pp. 569-625
Killion MC and Dallos P, 1979. Impedance matching by the combined effects of the
outer and middle ear. J Acoust Soc Am. 66. pp. 599-602
Kirikae I, 1960. The structure and function of the middle ear. The University of Tokyo
Press
Kobayashi M, 1955. The articulation of the auditory ossicles and their ligaments of
various species of mammalian animals. Hiroschima J Med Sci. 4. pp. 319-349
Kobrak HG, 1959. The middle ear. The University of Chicago Press.
Körner E, 1878. Die Gelenke der Gehörknöchelchen. Z Ohrenheilkd. 12. pp. 116Kringlebotn M and Gundersen T, 1985. Frequency characteristics of the middle ear.
J Acoust Soc Am. 77 (1). pp. 159-164
Kurokawa H and Goode RL, 1995. Sound pressure gain produced by the human
middle ear. Otolaryngol Head Neck Surg. 113. pp. 349-355
Lombard RE and Bolt JR, 1979. Evolution of the tetrapod ear: an analysis and
reinterpretation. Biol J Lin Soc. 11
Luschka H, 1858. Die Gelenke und Halbgelenke des menschlichen Körpers. Z
Ohrenheilkd. 153.
Mach E and Kessel J, 1874. Beiträge zur Topographie und Mechanik des
Mittelohres. Sitzungsber Kais Akad Wiss Wien Math Naturwiss Cl. 69. pp. 221-243
Magnus, 1861. Beiträge zur Anatomie des mittleren Ohres. Virchow's Arch. 20. pp.
88Mehrgardt S and Mellert V, 1977. Transformation characteristics of the external
human ear. J Acoust Soc Am. 61 (6). pp. 1567-1576
Miller GW and Keith RW, 1979. Hypermobility of the incudostapedial joint: a clinical
entity. Laryngoscope. 89 (12). pp. 1943-1950
Møller AR, 1963. Transfer function of the middle ear. J Acoust Soc Am. pp. 15261536
Møller AR, 1972. The middle ear. In: Tobias J (ed.) Fundamental of auditory theory,
Vol II. London: Academic Press. Pp. 133-194
Nishihara S and Goode RL, 1997. Measurement of tympanic membrane vibration in
99 human ears. In: Hüttenbrink KB. Proceedings of the international workshop on
middle ear mechanics in research and otosurgery. pp. 91-94
Politzer A, 1864. Untersuchungen über Schallfortpflanzung und Schallleitung im
Gehörorgane im gesunden und kranken Zustande. Arch Ohrenheilkd. 1. pp. 59-73
Politzer A, 1873. Zur physiologischen Akustik und deren Anwendung auf die
Pathologie des Gehörorgans. Arch Ohrenheilkd. 6. pp. 35-44
Price GR and Kalb JT, 1991. Insight into hazard from intense impulses from a
mathematical model of the ear. J Acoust Soc Am. 90. pp. 219-227
Ramirez-Garcia EA, 1980. In Vitro investigations of the mechanics of the middle ear
and implications in ossicular chain reconstruction surgery. Thesis. Glasgow:
University of Strathclyde.
References
148
Ravicz ME et al., 2000. Effect of freezing and thawing on stapes-cochlear input
impedance in human temporal bones. Hear Res. 150. pp. 215-224
Rosowski JJ et al., 1990. Cadaver middle ears as models for living ears:
comparisons of middle ear input impedance. Ann Otol Rhinol Laryngol (St.Louis
MO). 99. pp. 403-412
Rosowski JJ, 1992. Hearing in transitional mammals: Predictions from the middleear anatomy and hearing capabilities of extant mammals. In: Webster DB, Fay
RR, Popper AN (eds). The evolutionary biology of hearing. New-York: SpringerVerlag pp. 615-631
Rosowski JJ et al., 1986. The effectiveness of external and middle ears in coupling
acoustic power into the cochlea. In: Allen JB, Hall JL, Hubbard A, Neely ST, Tubis
A (eds). Peripheral auditory mechanisms. New-York: Springer-Verlag pp. 3-12
Rüdinger, 1870. Beiträge zur Histologie des Gehörorgans. Beiträge zur Histologie
des mittleren Ohres. München: pp. 18
Schmidt Ch, 1903. Zur Anatomie und Entwicklungsgeschichte der Gelenksverbindung der Gehörknöchelchen beim Menschen. Z Ohrenheilkd. 43. pp. 125
Schön F and Müller J, 1999. Measurements of ossicular vibrations in the middle ear.
Audiol Neurootol. 4. pp. 142-149
Shaw EAG, 1974. Transformation of sound pressure level from the free field to the
eardrum in the horizontal plane. J Acoust Soc Am. 56. pp. 1848-1861
Siebenmann F, 1898. Anatomie des Mittelohres. Handbuch der Anatomie des
Menschen. 5. pp. 284Slepecky NB, 1996. Structure of the mammalian cochlea. In: Dallos P, Popper AN,
Fay RR (eds). Springer handbook of auditory research: The cochlea. New-York:
Springer-Verlag pp. 44-129
Soemmering ST, 1791. Bänderlehre.
Stinson MR and Khanna SM, 1989. Sound propagation in the ear canal and
coupling to the eardrum, with measurements on model systems. J Acoust Soc Am.
85 (6). pp. 2481-2491
Stuhlman O, 1937. The nonlinear transmission characteristics of the auditory
ossicles. J Acoust Soc Am. 9. pp. 119-128
Tay HL and Mills RP, 1996. The mobility of the malleus and incus with varying
middle-ear pressures. Clin Otolaryngol (Oxford). 21. pp. 256-258
Tonndorf J and Khanna SM, 1970. The role of the tympanic membrane in middle ear
transmission. Ann Otol Rhinol Laryngol (St.Louis MO). 79 (4). pp. 743-753
Tonndorf J, 1974. New aspects of middle ear transmission 49. Acta Otorhinolaryngol
Belg. 28. pp. 425
Vlaming MS and Feenstra L, 1986. Studies on the mechanics of the normal human
middle ear. Clin Otolaryngol (Oxford). 11. pp. 353-363
Wada H et al., 1992. Analysis of dynamic behavior of human middle ear using a
finite- element method. J Acoust Soc Am. 92. pp. 3157-3168
Wada H et al., 2001. Measurement of stapes mobility in guinea pigs and rabbits.
Hear Res. 154. pp. 158-164
Weber E, 1851. Über den Mechanismus des Gehörorgans. Ber Verh K Sächs Ges
Wiss (Leibzig). pp. 29-31
References
149
Weistenhöfer C and Hudde H, 2000. Schwingungsformen der menschlichen
Ossikelkette bei Luftdruckschallanregung. Abstract. Fortschritte der Akustik-DGA.
Wever EG and Lawrence M, 1954. Physiological acoustics. Princeton University
Press.
Wiener FM and Ross DA, 1946. The pressure distribution in the auditory canal in a
progressive sound field. J Acoust Soc Am. 18. pp. 401-408
Woo SL and Young EP, 1991. Structures and function of tendons and ligaments. In:
Mow VC and Hynes WC (eds,). Basic orthopaetic biomechanics. New York: Raven
Press. pp. 199-243
Yamada H, 1970. Strength of biological materials. Baltimore: Williams & Wilkins