Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Collaborative information seeking wikipedia , lookup
Embodied cognitive science wikipedia , lookup
Catastrophic interference wikipedia , lookup
Knowledge representation and reasoning wikipedia , lookup
Genetic algorithm wikipedia , lookup
Multi-armed bandit wikipedia , lookup
Philosophy of artificial intelligence wikipedia , lookup
Computer Go wikipedia , lookup
Existential risk from artificial general intelligence wikipedia , lookup
Pattern recognition wikipedia , lookup
History of artificial intelligence wikipedia , lookup
Reinforcement learning wikipedia , lookup
CE213 Artificial Intelligence – Revision
Learning Outcomes
Basic AI Concepts and Methods
Check List of Problem Solving Skills
Sample Questions
Useful Equations
1
Learning Outcomes
1.
Explain and criticise the arguments that have been advanced both for
and against the possibility of artificial intelligence.
2.
Explain and implement standard blind and heuristic search procedures,
demonstrate an understanding of their strengths and weaknesses and
of how they may be applied to solve well-defined problems.
3.
Explain the operation of standard production system interpreters, and
demonstrate an understanding of their relative merits.
4.
Explain the operation of a range of established machine learning
procedures and demonstrate an understanding of the types of problems
for which they are appropriate.
5.
Demonstrate an understanding of the agent-oriented approach to
artificial intelligence, and explain how a multi-agent system of purely
reactive agents may be built using a subsumption architecture.
2
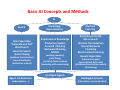
Basic AI Concepts and Methods
AI
Search
State Space Rep
“Generate and Test”
Blind Search
Heuristic Search
Game Playing
(problem formalisation)
(search methods)
(evaluation criteria)
Knowledge
Representation
Machine
Learning
Importance of Knowledge
Production System
Forward Chaining
Backward Chaining
MYCIN
Environment for ML
ML as Search
Decision Tree Induction
Neural Networks
Clustering
Reinforcement Learning
Genetic Algorithms
(working memory)
(rule firing)
(certainty factor system)
(reasoning with uncertainty)
(information gain)
((generalised) delta rule)
(discounted cumulative reward)
(Q learning)
Intelligent Agents
Agent Architectures
Multiagent Systems
(subsumption, …)
3
(interaction, communication)
Basic AI Concepts and Methods (2)
1. General AI approach to problem solving:
“generate/try + evaluate/test” (actions/solutions)
2. Problem formalisation and knowledge/solution representation:
state-action pairs/mapping, sequence of actions/moves,
input-output mapping (rules, decision tree, neural net),
3. Search strategies and evaluation criteria:
blind and heuristic search strategies
forward/backward chaining
machine learning as search (including genetic operators)
completeness (convergence), optimality, time/space complexity
4. Key elements of a machine learner
a task/problem and associated performance measure
a model and a learning algorithm
training samples (labelled or unlabelled) or
scenarios for exploration (learning process)
4
Check List of Problem Solving Skills
To formalise a given problem into a state space representation.
To analyse the properties of a give search strategy (4 criteria).
To find optimal route using a search strategy, given a state space and
heuristics or cost.
To find best move using minimax search, given a game tree with
heuristic values of leaf (terminal) nodes.
To identify rules that will fire and draw conclusions using forward
chaining, given a set of rules and initial facts.
To determine the certainty of a conclusion using backward chaining and
the Mycin’s certainty factor system, given a set of rules and initial facts.
To calculate information and information gain using the Shannon’s
information function, given a set of samples with values of attributes
and classes.
To induce a decision tree using best attribute selection based on
information gain, given a set of samples with values of attributes and
classes.
5
Check List of Problem Solving Skills (2)
To produce a dendrogram using agglomerative hierarchical clustering
method, given a set of samples with values of attributes and similarity
metric.
To calculate the discounted cumulative reward values of states, given a
state transition diagram with transition reward values.
To calculate the estimated Q value of a state and an action using the Q
learning procedure iteratively, given a state transition diagram with
reward value of goal reaching.
To choose a proper search strategy, given a specific problem.
To choose a proper machine learning method, given a specific learning
environment or task.
To design an MP neuron (to determine the values of weights and
threshold), given a linearly separable 2-dimensional data set.
Go through lecture notes and class problem sheets and assignments,
and find one exercise to practice for each skill. Tick a box if you are
confident in the associated problem solving skill.
6
Sample Questions
Check CE213 Exam Paper Rubric and Sample Questions.
(http://orb.essex.ac.uk/ce/ce213/CE213 Exam Paper Rubric and Sample Questions.pdf)
Check past CE213 exam papers.
(http://orb.essex.ac.uk/secure/exampapers.aspx?course=ce213)
(http://orb.essex.ac.uk/ce/ce213/CE213-2015-16-answers.pdf)
Review/redo the exercises given in the lectures, classes,
assignments.
(http://orb.essex.ac.uk/ce/ce213/ClassProblemSheetsWithAnswers.zip)
Typical problems/applications and problem formalisation:
puzzles, game playing, robot control, prediction/forecasting,
classification, clustering, optimisation, data mining.
7
Useful Equations
CFcombined = CFr1 + (1 – CFr1) x CFr2
(where 0≤CFr1≤1 and 0≤CFr2≤1)
()
| = | ×
()
= − 8
Useful Equations (2)
( + 1) = () + (! − ")
("
# +1 =
# + $ ̅ , $ ̅ ⇒ ! − "
(
#
) ≡ + ,
- ., ≡ ., + +) ∗ 1 ., := ., + +) ∗ . 2
:= ., + + 34 -(.′, 2 )
9
Office Hours for CE213 Revision
Wednesday 17th May, 2-3pm
Thursday 18th May, 2-4pm
My office room 4B.524
Answering questions from students ……
(For your convenience, a collection of lecture summaries are attached below.)
10
Lecture 1 Summary
What is Artificial Intelligence?
Building machines that think and learn like people.
Building machines that act rationally/intelligently.
Is Artificial Intelligence Possible?
Lady Lovelace’s Objection
The Turing Test
Searle’s Chinese Room
What Use is Artificial Intelligence?
Artificial Intelligence as Technology
Artificial Intelligence as Science
11
Lecture 2 Summary
Toy problems
Corn, Goose and Fox
Three Jugs
Finding a solution
Abstracting the essential features of a problem
Systematically searching for a solution
State space representation (Problem formalisation)
State space
Initial and goal states
Operators
Transition function
Representing operators
12
Lecture 3 Summary
Blind (Uninformed) Search Strategies
• Breadth First Search
• Depth First Search
• Depth Limited Search
• Iterative Deepening Search
• Uniform Cost Search
Comparison of Search Strategies
• Completeness
• Optimality
• Time Complexity
• Space Complexity
13
Lecture 4 Summary
Greedy Search
Expand node with smallest h(n)
Quick but not optimal
A* Search
Expand node with smallest g(n)+h(n)
Optimal (if the heuristic is admissible)
Efficient with a good heuristic
Hill Climbing
Only practical approach in many real problems
May not find the global maximum
14
Lecture 5 Summary
Minimaxing:
Permits adversarial search
Evaluation functions (most difficult part):
Heuristic on states (game positions)
Permit adversarial search in large state spaces
alpha-beta pruning (efficiency is essential for a huge search tree):
Reduces effort required to search to given depth
Monte-Carlo tree search – basic ideas:
Evaluation by running simulated games
Grandmaster chess programs also use:
Complex evaluation function
Position databases
Specialised parallel hardware
15
Lecture 6 Summary
Recognition that knowledge is necessary for problem solving
Dendral as an influential example
Production systems
Situation (condition or state) – action rules
Procedural representation
Knowledge represented in a form that indicates how it
can be used
Modularity
Production system vs. state space search
16
Lecture 7 Summary
Production Rule Interpreters
Core components of a production system
Rule Set
Interpreter
Environment (may be embedded in rule set)
Forward Chaining Rule Interpreters
The Match-Execute Cycle, Use of working memory
Conflict Resolution Strategies
First match, random, specificity, recency, assigned priority
Refractoriness
Key Features of Forward Chainers
Data driven
Rule selected from all those matching current situation
Require conflict resolution
Iterative
17
Lecture 8 Summary
Backward Chaining Rule Interpreters
Start with a hypothesis
Find rules whose RHSs draw conclusions about that hypothesis.
Determine whether the LHSs of those rules match the current
situation (This may be recursive with subsidiary hypotheses).
If so, execute the corresponding RHSs, thus confirming or
rejecting the hypothesis
Key Features/Properties of Backward Chainers
Hypothesis driven
No need for conflict resolution
Recursive
18
Lecture 9 Summary
Mycin’s basic architecture
Representing facts – OAV triples
Mycin’s rule format (OAVs in both condition and action parts)
Mycin’s control structure (rule interpreter)
Representing and reasoning with uncertainty
Explanation generation
19
Lecture 10 Summary
Why Machine Learning
What Is Machine Learning
How Is Machine Learning Done
Key Elements of a Machine Learner
Learning as Search
Taxonomy of Learning Tasks
Learning to classify, Learning to predict numerical values
Clustering, Reinforcement learning
• Brief History of Machine Learning
• Mathematical Preliminaries (mostly for self study)
Probability, Logarithms
•
•
•
•
•
•
20
Lecture 11 Summary
Decision Tree
Nodes represent attributes; Leafs represent classes;
Branches represent attribute values.
Decision Tree Induction
The Basic Decision Tree Induction Procedure (pseudo code)
Choosing the Best Attribute
Shannon’s Information Function
Using Information Gain to Evaluate an Attribute
21
Lecture 12 Summary
The Weather Data Example of Decision Tree Induction
Selection of best attributes
From Decision Trees to Production Rules
Knowledge discovery from data by machine learning
Some Issues in Decision Tree Induction
Inconsistent Data
Numeric Attributes
Overfitting (to be addressed again in Neural Networks)
22
Lecture 13 Summary
McCulloch-Pitts neural nets
MP Unit (Neuron)
What Can an MP Unit Compute?
Linear Separability
More Than One Unit
23
Lecture 14 Summary
Learning in Neural Networks Using the Delta Rule
Hebb Rule
Perceptron Rule
The Delta Rule
Limitations of the Delta Rule
Multilayer Networks Using Linear Units
24
Lecture 15 Summary
Multilayer Networks Using Back Propagation
Necessity of non-linear units
The generalized delta rule
Back propagation training of hidden units
Overfitting in Back Propagation Networks
What is overfitting?
How to deal with overfitting?
25
Lecture 16 Summary
Clustering
What is clustering?
Partitioning criteria
Agglomerative Hierarchical Clustering
Similarity criteria, dendrogram
K-Means Method
Similarity criteria or distance measures
Number of clusters
26
Lecture 17 Summary
Reinforcement Learning:
Characterising reinforcement learning tasks
Markov Decision Processes:
Control policies
Discounted cumulative rewards
Q Learning
The Q function
The Q learning algorithm (pseudo code)
Action selection strategies
Learning Q values by neural networks
27
Lecture 18 Summary
Biological Basis of Genetic Algorithms:
Gene and Chromosome
Mutation and Crossover
Natural Selection and Fitness
A Basic Genetic Algorithm
Cycles of “Evaluation – Selection – Reproduction”
(a new approach to “generate and test”)
Operators for Reproduction
Mutation
Crossover
Genetic Programming (for self study)
Syntax Trees
Operators (mutation and crossover)
28
Lecture 19 Summary
What Are Agents
Simple examples of agents
Intelligent Agents
Pro-active , Conditionally reactive, Socially interactive
A Formal View of Agents
Reactive agents, Agents with internal state
Subsumption Architectures
Planetary exploration example
Pros and Cons of Reactive Architectures
Architecture for Agents with Internal State – BDI
Multi-agent Systems
Interaction: Cooperation and competition,
centralised or distributed
Communication: Direct or indirect
29