Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Chapter I
Designed by .VAS
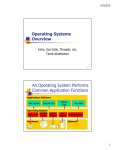
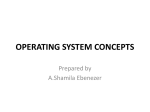
An operating system is a program that
manages the Computer Hardware .
Functions :
◦ Resource Allocation & Related Function
◦ User Interface function
Hardware
OS
Application
Program
User
Mainframe Systems
◦ For commercial & Scientific Application
◦ Batch Systems –
Similar kind of program
collect into single batch for
processing .
Multiprogrammed Systems
It increases CPU utilization by organizing jobs so
that the CPU always has one to execute.
Time-Sharing Systems
◦ Time sharing (or multitasking) is a logical
extension of multiprogramming.
◦ User interaction with the computer system.
◦ A time-shared operating system uses CPU
scheduling and multiprogramming to provide
each user with a small portion of a time-shared
computer.
Desktop Systems
◦ Personal computers PCs appeared in the 1970s.
◦ Used for maximizing user convenience and
responsiveness , instead of maximizing CPU and
peripheral utilization.
◦ Include PCs running Microsoft Windows and the
Apple Macintosh.
Multiprocessor Systems
◦ Most systems to date are single-processor systems .
◦ Multiprocessor systems (also known as parallel systems
or tightly coupled systems) are growing in importance.
Such systems have more than one processor
◦ Advantages : 1. Increased throughput
2. Economy of scale
3. Increased reliability
Distributed Systems
◦ A network, in the simplest terms,
communication path between two or
systems.
is a
more
◦ Distributed systems depend on networking for their
functionality.
◦ LAN , WAN , MAN
Program in execution .
Process Needs
◦
◦
◦
◦
CPU time,
Memory,
Files
I/O devices
Creating and deleting both User and System
processes
Suspending and resuming processes
Providing mechanisms for process synchronization
Providing mechanisms for process communication
Providing mechanisms for deadlock handling.
CPU and multiple device controllers that are
connected through a common bus .
Small Computer-Systems Interface (SCSI).
◦ Controller can have seven or more devices attached to
it.
◦ Device controller is responsible for moving the data
between the peripheral devices that it controls and its
local buffer storage.
I/O Interrupts
◦ To start an I/O operation ,
◦ CPU loads the appropriate registers within
the Device controller.
◦ Device controller examines the contents of
these registers to determine what action to
take .
◦ If read request found , controller will start
the transfer of data from the device to its
local buffer .
I/O Interrupts ( cont..)
◦ After transfer of data is complete .
◦ Device controller informs the CPU .
◦ It accomplishes this communication by
triggering an interrupt.
Courses of action :◦ synchronous I/O.
◦ asynchronus I/O
Two I/O Methods
DMA ( Direct Memory Access )
◦ Used for high-speed I/O devices.
◦ Device controller transfers an entire block of
data directly to or from its own buffer storage
to memory .
◦ No intervention by the CPU .
◦ Interrupt is generated per block, rather than
the one interrupt per byte .
◦ The DMA controller interrupts the CPU when
the transfer has been completed.
PROGRAM INPUT/
OUTPUT
Computer programs must be in main memory
(also called random-access memory or RAM)
to be executed.
Semiconductor technology called dynamic
random-access memory (DRAM) .
CPU automatically loads instructions from main
memory for execution.
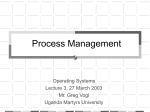
Storage device hierarchy
Process is a program in execution .
Process State
Process Control Block
Process Scheduling
New: The process is being created.
Running: Instructions are being executed.
Waiting: The process is waiting for some event to
occur (such as an I/O completion or reception of
a signal).
Ready: The process is waiting to be assigned to a
processor.
Terminated: The process has finished execution.
Process state: The state may be new, ready,
running, waiting, halted, and So on
Program
counter:
The
counter
indicates
the
address of the next instruction to be executed for
this process.
CPU registers: The registers vary in number and
type, depending on the computer architecture.
They include accumulators, index registers, stack
pointers, and general-purpose registers .
Scheduling Queues :-
processes enter the
system, they are put into a job queue .
The processes that are residing in main
memory and are ready and waiting to execute
are kept on a list called the ready queue.
Ready-queue header contains pointers to the
first and final PCBs in the list.
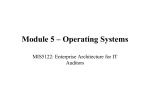
The ready queue and various I/O device queues
Queuing-diagram representation of process scheduling
Schedulers - process migrates between the
various scheduling queues throughout its
lifetime.
Long term Scheduler
- Selects processes
from this pool and loads them into memory .
Short term Scheduler - Selects from among
the processes that are ready to execute, and
allocates the CPU to one of them.
Addition of medium-term scheduling to the queuing diagram.
Switching the CPU to another process requires
saving the state of the old process and loading
the saved state for the new process.
Process Creation - process may create several
new processes, via a create-process system
call, during the course of execution.
Process Termination - process terminates
when it finishes executing its final statement
and asks the operating system to delete it by
using the exit system call.
a tree processes on typical Unix system
Process is cooperating if it can affect or be
affected by the other processes executing in
the system.
Several Reasons for allowing Cooperating
process –
Information sharing
Computation speedup
Modularity
Convenience
It is LWP – Light Weight Process .
Basic unit of CPU utilization .
Thread ID, Program counter, Register set, and
Stack.
A traditional (or heavyweight) process has a
single thread of control.
If process has multiple threads of control, it can
do more than one task at a time.
Example of MT.
◦ web browser
◦ word processor
Problem of ST .
◦ Web Server – Services to Client
Play a vital role in remote procedure call
(RPC) systems
Responsiveness ◦ Multithreading an interactive application may
allow a program to continue running even if part
of it is blocked or is performing a lengthy
operation .
Resource sharing –
◦ Threads
share
the
memory
and
the
resources of the process to which they
belong.
Economy –
◦ Allocating memory and resources for process creation
is
costly.
Alternatively,
because
threads
share
resources of the process to which they belong, it is
more
economical
to
create
and
context
switch
threads.
Utilization of multiprocessor architectures –
◦ Increased in a multiprocessor architecture, where each
thread may be running in parallel on a different
processor.
user threads –
◦ Supported above the kernel and are implemented
by a thread library at the user level
kernel threads –
◦ Supported directly by the operating system:
The
kernel
performs
thread
creation,
scheduling, and management in kernel
space.
Many-to-One Model
• Thread
management
is
done in user space,
so it is efficient,
but
the
entire
process will block
if a thread makes a
blocking
call
system
One-to-one Model
• One-to-one model maps each user thread to a kernel thread. It
provides more concurrency than the many-to-one model by allowing
another thread to run when a thread makes a blocking system call;
Many-to-Many Model
• Many-to-many model
multiplexes many userlevel threads to
a
smaller
number
threads.
or
of
equal
kernel
Fork-EXEC is a commonly used technique in
Unix / Linux whereby an executing process
spawns a new program.
fork() is the name of the system call that
the parent process uses to "divide" itself
("fork" into two identical processes).
Cancellation –
◦ 1.
Asynchronous
cancellation:
One
thread
immediately terminates the target thread.
◦ 2. Deferred cancellation: The target thread can
periodically check if it should terminate, allowing
the target thread an opportunity to terminate itself
in an orderly fashion.
Signal Handling
◦ 1. A signal is generated by the occurrence of a
particular event.
◦ 2. A generated signal is delivered to a process.
◦ 3. Once delivered, the signal must be handled.
Signal Handler
◦ 1. A default signal handler
Default signal handler that is run by the kernel
when handling the signal.
◦ 2. A user-defined signal handler
User-defined function is called to handle the
signal rather than the default action.
Problem for responding client.
◦ Web Server Problem – Multiple request handling.
◦ Unlimited threads could exhaust system resources,
such as CPU time or memory.
◦ Thread Pools (TP)
TP Create a number of threads at process startup
and place them into a pool , where they sit and
wait for work.
Server receives a request, it awakens a thread from
this pool-if one is available-passing it the request
to service
Once the thread completes its service, it
returns to the pool awaiting more work .
If the pool contains no available thread, the
server waits until one becomes free.
Threads belonging to a process share the
data of the process.
Each thread might need its own copy of
certain data in future .
Call such data thread-specific data.
Assigning
Unique
Identifier
to
each
transaction and associate UID to each thread.
POSIX - Portable Operating System Interface .
Defining an API for thread creation and
synchronization.