Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Loudspeaker wikipedia , lookup
Instrument amplifier wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
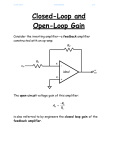
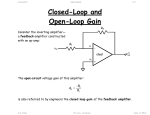
Oscilloscope wikipedia , lookup
Audio crossover wikipedia , lookup
Tektronix analog oscilloscopes wikipedia , lookup
Oscilloscope types wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Oscilloscope history wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Power electronics wikipedia , lookup
Current source wikipedia , lookup
Integrating ADC wikipedia , lookup
Audio power wikipedia , lookup
Positive feedback wikipedia , lookup
Scattering parameters wikipedia , lookup
Phase-locked loop wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Wilson current mirror wikipedia , lookup
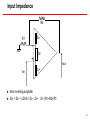
Public address system wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Current mirror wikipedia , lookup
Schmitt trigger wikipedia , lookup
Index of electronics articles wikipedia , lookup
Standing wave ratio wikipedia , lookup
Two-port network wikipedia , lookup
Zobel network wikipedia , lookup
Radio transmitter design wikipedia , lookup
Regenerative circuit wikipedia , lookup
Opto-isolator wikipedia , lookup
Rectiverter wikipedia , lookup
Negative feedback wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Electronics in High Energy Physics Introduction to electronics in HEP Operational Amplifiers (based on the lecture of P.Farthoaut at Cern) 1 Operational Amplifiers Feedback Ideal op-amp Applications – – – – Non-ideal amplifier – – – – – – Voltage amplifier (inverting and non-inverting) Summation and differentiation Current amplifier Charge amplifier Offset Bias current Bandwidth Slew rate Stability Drive of capacitive load Data sheets Current feedback amplifiers 2 Feedback Y is a source linked to X – Y=mx Open loop – x=de – y=mx – s=sy=sdmx e Closed loop m d y s s b x de b y y mx mde mby edm 1 bm esdm s sy 1 bm s sdm e 1 bm x y m is the open loop gain bm is the loop gain 3 Interest of the feedback e x m d s s b In electronics – m is an amplifier – b is the feedback loop – d and s are input and output impedances If m is large enough the gain is independent of the amplifier s sdm sd e 1 bm b 4 Operational amplifier - -A e 100 80 A (dB) e 120 60 40 20 + 0 1.0E+00 -20 1.0E+01 1.0E+02 1.0E+03 1.0E+04 1.0E+05 1.0E+06 1.0E+07 -40 Frequency (Hz) Gain A very large Input impedance very high – I.e input current = 0 A(p) as shown 5 How does it work? R2 Direct gain calculation Vin e I R1 Vout Ae ; Vout ( R1 R 2) I - Vout A Vin 1 A R1 R1 R 2 e Feed-back equation s sdm e 1 bm R1 ; d s 1 R1 R 2 Vout A Vin 1 A R1 R1 R 2 I R1 + -A e Vout m A; b Vin Ideal Op-Amp Vout R1 R 2 A ; Vin R1 6 Non-inverting amplifier R2 Gain Vin I R1 Vout ( R1 R 2) I Vout R1 R 2 Vin R1 I R1 - Called a follower if R2 = 0 + Input impedance Zin Vout Vin 7 Inverting amplifier R2 Gain Vin I R1 Vout R 2 I Vout R2 Vin R1 I R1 Vin Input impedance Zin R1 Gain error + Vout Vout R2 Vin R1 G R 2 G R G 8 Summation R Transfer function Vi Ii Ri I Ii Vout R I R I R1 V1 Vi Ri I1 - Rn Vn In If Ri = R + Vout Vout Vi 9 Differentiation R2 I1 R1 Vout R 2 I1 R 2 I 2 R 2 (I 2 I1) V1 R1 I1 R1 I 2 V 2 V 2 V1 R1 (I 2 I1) Vout R2 ( V 2 V1) R1 V1 I1 - R1 V2 I2 + Vout R2 10 Current-to-Voltage converter (1) C R Iin + Vout Vout = - R Iin For high gain and high bandwidth, one has to take into account the parasitic capacitance 11 Current-to-Voltage converter (2) R1 R2 r Iin + Vout High resistor value with small ones Equivalent feedback resistor = R1 + R2 + R2 * (R1/r) – ex. R1 = R2 = 100 k ; r = 1 k ; Req = 10.2 M Allows the use of smaller resistor values with less problems of parasitic capacitance 12 Charge amplifier (1) R 1 Vout (p ) I (p ) Cp I ( t ) d( t ) ; I ( p ) 1 1 1 Vout (p ) ; Vout (t ) (t ) Cp C C I Requires a device to discharge the capacitor – Resistor in // – Switch + 1.5 Time 0 2 4 6 8 10 1 Input current 0.5 0 RC network -0.5 -1.5 12 1 Input & Output Input and Output 1.5 -1 Vout Capacitor only Input current 0.5 0 -0.5 0 2 4 6 8 10 12 14 16 -1 Output -1.5 -2 Time 13 Charge amplifier (2) R C I + Input Charge In a few ns V1 C1 R2 R1 Output of the charge amplifier Very long time constant C2 V2 Shaping a few 10’s of ns 14 Miller effect Charge amplifier – – – – Vin = e Vout = -A e The capacitor sees a voltage (A+1) e It behaves as if a capacitor (A+1)C was seen by the input C Vin –Two circuits are equivalent X Z e A e Vout + Miller’s theorem –Av = Vy / Vx - Y Y X Z1 Z2 »Z1 = Z / (1 - Av) »Z2 = Z / (1-Av-1) 15 Common mode The amplifier looks at the difference of the two inputs – Vout = G * (V2 - V1) The common value is in theory ignored – V1 = V0 + v1 – V2 = V0 + v2 In practice there are limitations – linked to the power supplies – changes in behaviour Common mode rejection ratio CMRR – Differential Gain / Common Gain (in dB) 16 Non-ideal amplifier Input Offset voltage Vd Input bias currents Ib+ and IbIb- Limited gain Input impedance Zc e Zd -A e Output impedance Common mode rejection Noise Bandwidth limitation & Stability Zout + Vd Ib+ Zc 17 Input Offset Voltage “Zero” at the input does not give “Zero” at the output In the inverting amplifier it acts as if an input Vd was applied R2 I R1 - – (Vout) = G Vd Notes: – Sign unknown – Vd changes with temperature and time (aging) – Low offset = a few mV and Vd = 0.1 mV / month – Otherwise a few mV Vd + Vout 18 Input bias current (1) (Vout) = R2 Ib(Vout) = - R3 (1-G) Ib+ Error null for R3 = (R1//R2) if Ib+ = Ib- R2 Ib- R1 + R3 Ib+ Vout 19 Input bias current (2) In the case of the charge amplifier it has to be compensated Switch closed before the measurement and to discharge the capacitor Values – less than 1.0 pA for JFET inputs – 10’s of nA to mA bipolar C Ib- + R3 Ib+ Vout 20 Common mode rejection Non-inverting amplifier Input voltage Vc/Fr (Vc common mode voltage) Same effect as the offset voltage R2 I R1 Vc/Fr + Vout 21 Gain limitation R2 R2 R1 A A Gi R1 R1 A R1 R 2 A 1 Gi R2 Gi R1 1 Gi G G Gi Gi if Gi A A G I R1 Vin e + -A e Vout A is of the order of 105 – Error is very small 22 Input Impedance R2 Zc- R1 Zd + Vin Vout Zc+ Non-inverting amplifier Zin = Zc+ // (Zd A / G) ~ Zc+ G= (R1+R2)/R1 23 Output impedance R2 Non-inverting amplifier Vout Zout when Vin 0 Iout Vout e G - Aee - Zo Io; Vout (R1 R2) (Io Iout) G Zout Zo A R1 R2 G R1 I0 + Iout R1 e -A e I0 Iout Z0 + Vout 24 Current drive limitation Maximum Output Swing R2 R1 I + Vout RL Vin RL*Imax RL Vout = R I = RL IL The op-amp must deliver I + IL = Vout (1/R + 1/RL) Limitation in current drive limits output swing 25 Bandwidth f3db= fT/G 120 100 Gain [dB] 80 fT 60 40 20 0 -20 1.0E+00 -40 1.0E+01 1.0E+02 1.0E+03 1.0E+04 1.0E+05 1.0E+06 1.0E+07 Frequency Gain amplifier of non-inverting G(p) = G A(p) / (G + A(p)) – A(p) with one pole at low frequency and -6dB/octave » A(p) = A0 / (p+w0) – G = (R1+R2)/R1 40 dB – Asymptotic plot » G < A G(p) = G » G > A G(p) = A(p) 26 Slew Rate 1.4 1.2 1 0.8 0.6 0.4 0.2 0 0 0.5 1 1.5 2 2.5 3 3.5 Limit of the rate at which the output can change Typical values : a few V/ms A sine wave of amplitude A and frequency f requires a slew rate of 2pAf S (V/ms) = 0.3 fT (MHz); fT = frequency at which gain = 1 27 Settling Time 1.4 Amplitude 1.2 1 0.8 0.6 0.4 0.2 0 0 5 10 15 20 Time Time necessary to have the output signal within accuracy – ±x% Depends on the bandwidth of the closed loop amplifier – f3dB = fT / G Rough estimate – 5 t to 10 t with t = G / 2 p fT 28 Stability Unstable amplifier G(p) = A(p) G / (G + A(p)) – A(p) has several poles If G = A(p) when the phase shift is 180o then the denominator is null and the circuit is unstable Simple criteria – On the Bode diagram G should cut A(p) with a slope difference smaller than -12dB / octave – The loop gain A(p)/G should cut the 0dB axe with a slope smaller than -12dB / octave Phase margin – (1800 - Phase at the two previous points) The lower G the more problems 120 100 80 -12 dB/octave 60 Gain [dB] 40 20 0 -20 -12 dB/octave -40 -60 -80 1.0E+00 1.0E+01 1.0E+02 1.0E+03 1.0E+04 1.0E+05 1.0E+06 Frequency - Open loop gain A(p) - Ideal gain G - Loop gain A(p)/G 29 Stability improvement 120 120 100 100 80 80 Gain [dB] Gain [dB] 60 40 20 0 -6 dB/octave -20 60 40 20 0 -40 -20 -60 -40 -80 1.0E+00 1.0E+01 1.0E+02 1.0E+03 1.0E+04 1.0E+05 1.0E+06 Frequency Compensation -60 1.0E+00 -6 dB/octave 1.0E+01 1.0E+02 1.0E+03 1.0E+04 1.0E+05 1.0E+06 Frequency Pole in the loop Move the first pole of the amplifier – Compensation Add a pole in the feed-back These actions reduce the bandwidth 30 Capacitive load Buffering to drive lines R2 R1 - C = 20 pF 10 C Load = 0.5 mF + The output impedance of the amplifier and the capacitive contribute to the formation of a second pole at low frequency – A’(p) = k A(p) 1/(1+r C p) with r = R0//R2//R – A(p) = A0 / (p+w0) Capacitance in the feedback to compensate – Feedback at high frequency from the op-amp – Feedback at low frequency from the load – Typical values a few pF and a few Ohms series resistor 31 Examples of data sheets (1) 32 Examples of data sheets (2) 33 Current feedback amplifiers e - -A e Zt ie ie + Voltage feedback + Current feedback Zt = Vout/Ie is called the transimpedance gain of the amplifier 34 Applying Feedback R2 R1 Vin ( I Ie ) R1 Vout ( R1 R 2 ) I R1 Ie Vout Zt Ie I - Zt ie Vout R1 R 2 1 R1 R 2 if Zt Vin R1 1 R 2 R1 Zt ie + Vout Vin Non-inverting amplifier Same equations as the voltage feedback 35 Frequency response R2 R1 Vout R1 R 2 1 Vin R1 1 R 2 Zt Z0 Zt pw Vout R1 R 2 1 Vin R1 1 R 2( p w) Z0 I - Zt ie ie + Vout Vin The bandwidth is not affected by the gain but only by R2 – Gain and bandwidth can be defined independently Different from the voltage feedback – f3dB = fT / G 36 Data sheet of a current feedback amplifier 37 Data sheet of a current feedback amplifier (cont’) Very small change of bandwidth with gain 38 Transmission Lines Lossless Transmission Lines Adaptation Reflection Transmission lines on PCB Lossy Transmission Lines 39 Lossless transmission lines (1) L,C per unit length x Impedance of the line Z Z ZCx p 1 L Z 2 ZLx p 0 C L x 0; Z2 C L Z C Z Lx p Pure resistance Lx Cx Lx Cx Z 40 Lossless transmission lines (2) Propagation delay V2 V1 Lx p I V1 Lx p V1 V1 (1 LC xp) Z 1 1 After unity length ( cells) V2 V1 (1 LC x p ) x x x 0 ; V2 V1 e LCp V2 (t ) V1 (t t) (t t) ; t LC Pure delay Lx V1 Cx I V2 Z 41 Lossless transmission lines (3) Z Characteristic impedance pure resistance Pure delay Capacitance and inductance per unit of length Example 1: coaxial cable L C t LC L Zt t C Z – Z = 50 – t = 5 ns/m – L = 250 nH/m; C = 100 pF/m Example 2: twisted pair – Z = 100 – t = 6 ns/m – L = 600 nH/m ; C = 60 pF/m 42 Reflection (1) Source generator Zs Zo – V, Output impedance Zs Line appears as Z0 Is V 1 Z0 ; Vs V ZS Z 0 ZS Z0 V Vs Is ZL All along the line Vs = Z0 Is If the termination resistance is ZL a reflection wave is generated to compensate the excess or lack of current in ZL VL Z L I L VR Z 0 I R VL Vs VR IL Is I R The reflected wave has an amplitude VR Vs Z L ; VR Vs ZL Z0 ZL Z0 Z L 0 ; VR Vs 43 Reflection (2) The reflected wave travels back to source and will also generate a reflected wave if the source impedance is different from Z0 1.2 1 0.8 Volt – During each travel some amplitude is lost V ZS = 1/3 Z0 ZL = 3 Z 0 0.6 0.4 Vs VL 0.2 0 The reflection process stops when equilibrium is reached 0 5 10 15 20 25 Time – VS = VL 1.2 Zs < Z0 & ZL > Z0 Dumped oscillation Zs > Z0 & ZL > Z0 Integration like 1 ZS = 3 Z 0 ZL = 3 Z 0 0.8 Volt 0.6 V Vs VL 0.4 0.2 0 0 5 10 15 20 Time 44 Reflection (3) 1.2 Adaptation is always better – At the destination: no reflection at all – At the source: 1 reflection dumped 1 0.8 Volts V 0.6 VS VL 0.4 1 transit time 0.2 » Ex. ZL = 3 Z0 0 0 5 10 15 20 Time Can be used to form signal 1.2 1 – Clamping 0.8 2 transit time Zs Zo Volt 0.6 V 0.4 VS 0.2 VR 0 -0.2 0 V Vs 5 10 15 20 -0.4 -0.6 Time 45 Transmission lines on PCB Microstrip Z0 C0 5.98 H 87 ln e r 1.41 0.8 W T 0.67 e r 1.41 pF / inch 5.98 H ln 0.8 W T tpd 1.016 0.475e r 0.67 ns / feet Example : e r 5 ; H 0.6mm ; W 0.5mm ; T 35m Z 0 106 ; C 0 1.4 pf / inch ; t pd 1.77 ns / feet 5.80 ns / m Stripline Z0 C0 60 1.92H T ln e r 0.8 W T 1.41e r pF / inch 3.81H ln 0.8 W T tpd 1.016 e r ns / feet Example : e r 5 ; H 0.8mm ; W 0.5mm ; T 35m Z 0 53 ; C 0 5 pf / inch ; t pd 2.27 ns / feet 7.45 ns / m 46 Lossy transmission lines Idem with RsL instead of L, Rp//C instead of C Z R s Lp 1 Cp Rp Rs L C Rp Characteristic impedance depends on w – Even Rs is a function of w because of the skin effect Signal is distorted Termination more complex to compensate cable characteristic 47 Bibliography The Art of Electronics, Horowitz and Hill, Cambridge – Very large covering An Analog Electronics Companion, S. Hamilton, Cambridge – Includes a lot of Spice simulation exercises Electronics manufacturers application notes – Available on the web » (e.g. http://www.national.com/apnotes/apnotes_all_1.html) For feedback systems and their stability – FEED-2002 from CERN Technical Training 48