Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Audio power wikipedia , lookup
Immunity-aware programming wikipedia , lookup
Oscilloscope types wikipedia , lookup
Oscilloscope history wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Radio transmitter design wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Josephson voltage standard wikipedia , lookup
Power MOSFET wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Current source wikipedia , lookup
Surge protector wikipedia , lookup
Two-port network wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Wilson current mirror wikipedia , lookup
Power electronics wikipedia , lookup
Valve audio amplifier technical specification wikipedia , lookup
Integrating ADC wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Voltage regulator wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Current mirror wikipedia , lookup
Schmitt trigger wikipedia , lookup
Operational amplifier wikipedia , lookup
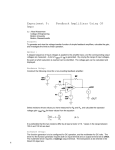
4/29/2017 769834732 1/4 Example: The Input Bias Current Q: How do input bias currents I B 1 and IB 2 affect amplifier operation? A: Consider both inverting and non-inverting configurations. Inverting Configuration R2 i2 vin R1 i1 vIB 1 v+ IB 2 vout + In this case, we apply KCL and we find: i1 i2 IB 1 However, we still find v v 0 (neglecting the input offset voltage) by virtue of the virtual short. 4/29/2017 769834732 2/4 Therefore, from KVL and Ohm’s Law: i1 vin v vin R1 R1 and i2 v vout vout R2 R2 Combining these results: vin vout IB 1 R1 R2 The output voltage is thus: R vout 2 vin R1 IB 1 R1 Note again that if IB 1 0 , the result reduces to the expected inverting amplifier equation: R vout 2 vin R1 The second term in the above expression ( IB 1 R1 ) therefore represents another output offset voltage! It appears that we should keep the value of R1 small to minimize the output offset voltage. However, what will this do to the amplifier input resistance? 4/29/2017 769834732 3/4 Non-Inverting Configuration R1 R2 i1 i2 IB 1 vIB 2 vin vout v+ + Neglecting the input offset voltage, we can use the virtual short to determine that: v vin and KCL provides the same result as that of the inverting amplifier: i1 i2 IB 1 where from KVL and Ohm’s Law: i1 and likewise: i2 0 v vin R1 R1 v vout vin vout R2 R2 4/29/2017 769834732 4/4 Combining, we find: vin vin vout IB 1 R1 R2 or rearranging: R vout 1 2 vin IB 1R2 R1 Again, we find that this result is simply the ideal non-inverting expression: R vout 1 2 vin R1 with an added output offset voltage term: IB 1 R2 In this case, we find that this offset voltage is minimized by making feedback resistor R2 small. In general, we find that the effects of the input bias currents can be minimized by using small resistor values. However, we will find that there is an additional strategy for minimizing the effects of input bias currents!