Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Mass versus weight wikipedia , lookup
Special relativity wikipedia , lookup
Thermal conduction wikipedia , lookup
Thomas Young (scientist) wikipedia , lookup
Equation of state wikipedia , lookup
Speed of gravity wikipedia , lookup
Lorentz force wikipedia , lookup
Electromagnetic mass wikipedia , lookup
Faster-than-light wikipedia , lookup
History of physics wikipedia , lookup
Internal energy wikipedia , lookup
Gibbs free energy wikipedia , lookup
Electromagnetism wikipedia , lookup
Negative mass wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Conservation of energy wikipedia , lookup
Work (physics) wikipedia , lookup
Anti-gravity wikipedia , lookup
Atomic nucleus wikipedia , lookup
Atomic theory wikipedia , lookup
Time in physics wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
AP PHYSICS II EXAM -2015
STUDY GUIDE
Dr. Malik
I.
Review Section 1: Overview of AP Physics Concepts
A. The seven big ideas. (Concept questions)
1) Objects and systems have properties such as mass and charge. Systems may have internal
structures.
2) Fields existing in space can be used to explain interactions.
3) The interactions of an object with other objects can be described by forces.
4) Interactions between systems can result in changes in those systems.
5) Changes that occur as a result of interactions are constrained by conservation laws.
6) Waves can transfer energy and momentum from one location to another without the
permanent transfer of mass and serve as a mathematical model for the description of other
phenomena.
7) Probability can be used to describe quantum systems.
B. Objects vs. Systems
1) Object- isolated mass being acted upon by an outside force. (Described by mass and charge)
Use: Fnet = ma *results in change in speed and/or direction
2) Systems (isolated) - Made up of objects that may interact by the conservation laws.
Use: Conservation of momentum: pi=pf
Conservation of Energy: MEi = MEf
C. Fundamental Particles – No internal structures
1) Can’t be broken into smaller pieces. These are true objects.
2) Electrons and photons are fundamental particles. Can be converted to energy but can’t be
broken down into smaller pieces.
3) Protons and neutrons are not fundamental particles. They break down into quarks and
gluons which are fundamental particles.
II.
Review Section 2: Vectors
A. Coordinate Systems and Frames of Reference
1) Frame of Reference- All observations and measurements are made relative to a chosen
frame of reference. These different points of views are known as frames of reference.
2) The coordinate system within the frame of reference is defined to be a set of reference
lines that intersect at an arbitrarily chosen fixed point called the origin.
3) In the Cartesian coordinate system, the reference lines are three mutually perpendicular
lines designated x, y, and z.
1
4) The coordinate system must provide a set of rules for locating objects within that frame of
reference.
5) Inertial frame of reference- It is impossible to observe whether or not the reference frame
is in motion if the observers are moving with it. A frame of reference moving at a constant
velocity relative to the origin is called an inertial frame of reference.
B. Vectors
1) Vectors( R ) – A directed line segment with both magnitude |𝑹| and direction (θ) is called a
vector quantity. Any quantity with only magnitude is called a scalar quantity.
Vector quantities examples: force, velocity, weight, displacement
Scalar quantities examples: mass, distance, speed, and energy.
2) Polar coordinate system – Use only the magnitude of the vector (r ) and the direction angle
(θ). In two dimensions, to locate the point in the Cartesian system (x,y), we use:
X = rcosθ
r2 = x2 + y2
y = rsinθ
tanθ = y/x
The magnitude of R is given by: |𝑹| = r = √𝒙𝟐 + 𝒚𝟐
𝒚
The direction of angle θ is given by: θ = tan-1 𝒙
3) Addition of Vectors
a. Vectors add constructively from head to tail.
b. The vector sum is called the resultant.
c. Solve for the magnitude and direction of the resultant for your answer using:
𝒂
𝒃
𝒄
Law of sine’s: 𝒔𝒊𝒏𝑨 = 𝒔𝒊𝒏𝑩 = 𝒔𝒊𝒏𝑪
Law of cosines: c2 = a2 + b2 – 2abcosC
4) Addition methods using the components of vectors
a. Solve for the x and y component of each vector using:
Rx=Rcosθ
and
Ry = Rsin𝜃
Subtotal the x and y components to get Rx total and Ry total
b.
c. Use Pythagorean Theorem to solve for the magnitude of the resultant:
r = √𝑹𝟐𝒙 𝒕𝒐𝒕𝒂𝒍 + 𝑹𝟐𝒚 𝒕𝒐𝒕𝒂𝒍
d. Use Tan-1 to get the direction of the resultant.
θ = tan-1(Ry total/ Rx total)
5) Miscellaneous
a. Be Careful when solving for the angle. Make sure you adjust the angle for the quadrant that
your total x and total y component are in, if necessary.
b. Angles are positive and rotate counterclockwise starting from the +x axis or due east.
Negative angles rotate clockwise from the same starting position.
c. The magnitude of a vector is never negative.
2
III.
Review Section 3: Force (Electric Force, Magnetic force)
1. Forces
a.
b.
c.
d.
Forces are push or pulls and represented by vectors. There are contact and field forces.
Inertia is the tendency of a mass to resist a force changing its state of motion.
Friction is the force that opposes motion.
Newton’s three laws are used to understand dynamic motion.
i. Newton’s First Law (Law of inertia) – In the absence of a net external
force, an object maintains constant velocity.
ii. Newton’s Second Law- If a net force is acting on a mass then the mass
will accelerate in the direction of the net force and is directly
proportional to the force. Fnet=ma.
iii. Newton’s 3rd Law - For every action there is an equal and opposite
reaction force.
e. Free body diagrams
f. In circular motion net force is directed towards the center and is referred to as
centripetal force.
IV.
Review Section 4: Center of Mass
1. The center of mass is the point in a system (multiple masses) about which all the mass is
balanced.
2. The center of mass point is found by taking the weighted average of all points of mass along
each axis:
xcm = ∑ 𝑚𝑖 𝑥𝑖 /∑ 𝑚𝑖
ycm = ∑ 𝑚𝑖 𝑦𝑖 /∑ 𝑚𝑖
V.
Review Section 5: Electrostatics
1. The nature of Electric Charges
a. There are two types of electric charge: positive and negative.
b. Electrons are the fundamental carriers of negative charge.
c. Protons are the fundamental carriers of positive charge.
d. Like charges repel, while unlike charges attract.
e. The presence of static charges can be determined by the use of an electroscope.
f. Objects become charged through the transfer of electrons.
2. Coulomb’s law
a. Used to find the electric force between two static charges.
b. The force is either attractive (-) or repulsive (+) and is proportional to the product of the
charges and inversely proportional to the square of the distance between them. This is
an inverse square law.
F=
𝒌𝒒𝟏 𝒒𝟐
𝒓𝟐
F = qE
F =(1/4𝝅€o )
3
𝒒𝟏 𝒒𝟐
𝒓𝟐
k=constant
€o = constant, Permittivity of free space
3. The electric potential difference
a. Equal to the work done per unit charge and measured in Joules/ coulomb or VOLTS.
W = Eq𝜟𝒓 in the direction of E
ΔU= qEΔV
4. Capacitor
a. A device that stores charge and energy.
b. The capacitance of a capacitor is the amount of charge stored per unit volt, units: farads
(F).
C = Q/V = €oA/d
5. Electric field lines
a. Indicate the direction of electric force on positive charges.
b. They come out of a positive source charges and into negative source charges.
c. They never cross and their relative spacing indicates the strength of the field.
d. Electric field strength (E) is found by:
E = F/q
Units: N/C
6. Equipotential lines
a. Indicate regions of constant electric potential.
b. These lines (surfaces), intersect the electric field lines at right angles.
c. The highest values are near positive source charges and the lowest is near negative
source charges.
7. The electron volt (eV) is a unit of electrical energy. 1eV = 1.6 x 10-19j
VI.
Review Section 6: Electric Circuits
1. Current and Electricity (I) units: amps. The direction is from + to -. Measured with an
Ammeter (current flows through the ammeter).
2. I=ΔQ/Δt
3. Electromotive force (emf) – The battery that supplies potential difference needed to
maintain continuous flow of charge. Not a force, measured in volts (v).
4. Know your Circuit symbols for wire, switch, battery, Ammeter, voltmeter, capacitor,
bulb, resistor.
5. Electric Resistance (R):
i. R = V/I
*at constant temperatures Units: Ohms(Ω)
ii. Rwire = ρL/A
ρ = resistivity of material
4
6. OHMS LAW:
i. V = IR, Materials that follow Ohm’s law are called Ohmic. Semiconductors and
liquid conductors are nonohmic.
7. Electric Power (Watts) and Energy (Joules)
i. P=VI
ii. Energy(j) =Pt=V/t
8. Series and Parallel circuits:
i. Know the rules for I, V, R, C, P rules for series and parallel.
ii. Series: I = I1=I2=I3, V=V1+V2+V3
R=R1+R2+R3
1/C=1/C1+1/C2+1/C3
iii. Parallel: I = I1+I2+I3, V=V1=V2=V3
1/R=1/R1+1/R2+1/R3
C=C1+C2+C3
9. RC Circuits:
i. I = emf/R and V=Q/C *Capacitor fully charged or discharged after five time
constants (TC).
ii. 1 TC = RC. At T=0, Current is Max and Voltage is 0 through the capacitor. At
t=5TC, V = Max and I = 0 through the capacitor.
iii. Max voltage is equal to the source battery. Watch out for parallel circuits on
both charge and discharge. Capacitors in circuits:
1. Series: 1/C=1/C1+1/C2+1/C3
2. Parallel: C=C1+C2+C3
VII.
Review Section 7: Magnetism and Electromagnetism
1. Magnetic Fields (Tesla, T) and forces (Fmag, N)
2. Compass needles – Align with the external magnetic field lines. Lines go from North to
South outside the magnet. Like poles repel, unlike poles attract.
3. A circle with a dot in it is coming out of the page, A circle with an x in it is going into the
page.
4. Magnetic Force on a moving charge. F = BQvsinθ Max when perpendicular, Zero when
parallel.
5. Magnetic fields due to current in wires
a. Long Straight Wires: Use right hand rule. The field rotates around the conductor in the
direction given by the RHR.
B = ul/2𝝅r u=permeability of material
r=distance from wire
I=current
b. A loop of Wire (B at the center is given by)
B = uNl/2r
u=permeability of material
N = Turns of wire
R=radius of loop
I=current
c. Solenoid: Several loops is called a solenoid. The magnetic field inside the solenoid is
constant and given by:
B=u(N/L)I
5
6. Magnetic force on a wire: F = BILsinθ
7. Magnetic force between two wires. F12=uI1I2/2𝜋𝑟 can be attracted or repulsive.
8. The direction of a magnetic force is given by the right hand rule.
i. Thumb = direction of current flow(I)
ii. Palm = Direction of force (F)
iii. Fingers = direction of Magnetic Field (B).
1. If the velocity and magnetic field are perpendicular to each other, the path
of a charge in the field is a circle of radius R.
Fc=mac = mv2/R = BQv
and
R = mv/QB
and
m=RQB/v
*The induced force is always at right angles to the deflected path.
9. Induction and EMF in a wire:
i. F=BQv
ii. W=BQvL
iii. emf=Blv
10. Generator action requirements.
i. You must have a Conductor, magnetic field, relative motion
ii. Faraday’s law of induction: The magnetic flux(Φ) , Units: webers(w)
iii. Φ = BAcosθ
iv. Faradays law of electromagnetic induction:
1. Emf = -(ΔΦ/𝜟𝒕)
2. If there are N turns of wire then Emf = -N(ΔΦ/𝜟𝒕)
*the negative sign is Lenz’s law-the induced current will always flow in the direction such that
its magnetic field opposes the one that created it.
VIII.
Review Section 8: Physical Optics
1. Electromagnetic Waves-Electric field and magnetic field are perpendicular to each other.
ROYGBV for white light colors of rainbow. No medium needed. Travel at the speed of light
(c) in a vacuum. V=f𝜆 v = c for EM waves in a vacuum. c = 3x108m/s
2. Reflection: The law of reflection says that the angle of incidence (i) equals the angle of
reflection (r). Smooth surface reflection is Specular and rough surface reflection is diffuse.
6
Remember that the angles are measured from the normal drawn perpendicular to the
surface.
Specular
Diffuse
3. Monochromatic Light - a light which has only one wavelength (or frequency) is called
monochromatic light. Ex. - laser is a monochromatic but sunlight is not monochromatic.
Coherent Light – Two wave sources are coherent if they have a constant phase difference
and the same frequency. All the waves of light are moving in phase.
4. Refraction – Refraction is the bending of waves as they pass from one medium to another,
due to a change in their speed. The phenomenon is most commonly associated with light,
but can also apply to sound, or even water waves. Light bends towards or away from the
normal based on the index of refraction (n). If n1 < n2 then light bends toward the normal
and slows down due to the higher density medium. If n1>n2 bends away from the normal
and speeds up as the density of the medium decreases. The index of refraction (n) of air is
1.00. Nothing has an “n” value that is less than air. n=c/v
5. Snell’s Law is used for Refraction:
n1sinθ1=n2sinθ2
V=𝝀𝒇
**FREQUENCY DOES NOT CHANGE
Velocity and Wavelength can Change
See figure below:
7
6. Application of light Refractioni. Critical angle is the angle of incidence at which total internal reflection occurs. n1>n2.
ii. If the angle of incidence is greater than the critical angle, total internal reflection will
occur.
Sinθc=n2/n1
**n1 must be greater than n2
7. Interference and diffraction of light. Multiple slit diffraction with monochromatic light, an
alternating pattern of dark and light regions appear.
Young’s double slit Experiment
8. Constructive and destructive interference
a. The ability of light to diffract and exhibit an interference pattern is evidence of the wave
nature of light.
b. EM waves are produced by oscillating electromagnetic fields.
c. Light waves are transverse waves since they can be polarized.
d. Interference patterns can be observed by using 2 or more narrow slits.
e. When light passes through a grating (multi-slit), a serious of continuous spectra appear.
f. With monochromatic light, an alternating pattern of bright and dark regions appears.
g. Each source of light produces circular waves as light passes through the slit. These
overlap each other and where crests overlap crests you get constructive interference
8
(bright region) and where troughs overlap crests, you get destructive interference (dark
region).
h. Huygens’s principle – Each slit acts as a new point source that interferes with waves
from the other slits.
i. Central Maximum – (Called the “0” order maximum) because there is no path length
difference between the two slits.
a. Each successive constructive interference point (n=0, 1, 2 …) is caused by the
path length difference between the path from the higher slit (L1) to the point of
constructive interference and the path from the lower slit (L2).
b. Any time the path difference is exactly one wavelength, the two waves arrive
in phase and constructive interference occurs (bright):
L2 – L1 = mλ
m=number of order (Bright)
𝝀 𝒙
m𝒅=𝑳
mλ = dsinθ
c. Half values of ”m” give points of destructive interference (dark). Waves arrive
at half a wave length, or out of phase.
d. THE DIFFRACTION FORMULA
𝝀
𝒙
m𝒅= 𝑳
L=Distance from slit to screen
x =distance between slits
m𝝀 = 𝒅𝒔𝒊𝒏𝚯
Θ = Angle from midpoint between slits and a particular order on the screen. The
ratio is x/L is approximately equal to Sin Θ.
IX.
Review Section 9: Geometric Optics (Mirrors and Lenses)
1. Equations: Lens Maker Equations
𝑹
F=𝟐
F = Distance to the focal point (f)
R = Radius (Center of Curvature)
𝟏
𝒇
= 1/so +1/si
s0 = Distance to the object
si = Distance to the image
f = focal point
m = hi/ho = -si/so
m =magnification multiple (>1 = Larger, <1 = Smaller)
9
hi = Image size
ho = Object Size
2. Image formation in Plane Mirrors – Left-right reversal, virtual image (inside the mirror), Use
law of reflection.
3. Image formation in curved mirrors – Concave ” )”- converges light to a focal point in front of
the mirror, real image. Convex mirror ”(“ – diverges light rays away, virtual focal point
behind the mirror, virtual image.
Concave Mirror Image Location
Convex Mirror Image Location
10
4. Real vs. Virtual Images for lenses
CONVERGING LENS
DIVERGING LENS
5. Spherical aberration –Mirror curvature too large causing distortions in the observed
image.
6. Real vs virtual images For Mirrors
11
MIRRORS (Short Version)
LENSES (Short Version)
7. LENS MAKER EQUATION USE
F=R/2
𝟏
𝒇
= 1/so + 1/si
m = hi/ho = -si /so
f= focal length (Positive in a concave mirror and negative in a convex mirror.
m = magnification (negative m = inverted, m>1 = larger, m<1 = smaller.)
8. Summary:
i. Concave mirrors and convex lenses both produce real and virtual images. The real
image may be larger or smaller than the object. Virtual images are always larger.
12
ii. Plane mirrors, convex mirrors, and concave lenses always produce virtual images.
The virtual images produced by a convex mirror and concave lens are always
smaller than the object.
iii. No image is formed if the object is placed at the focal point of a concave mirror or
convex lens.
X.
Review Section 10: Fluids
1. Static Fluids (Pressure and Buoyancy) –Liquids are incompressible. Gases are referred to as
compressible fluids. Liquids do work by being displaced. Gases do work by expanding or
compressing. Fluids exert pressure by their weight or force of motion.
P=F/A
2. Pascal’s Principle: When the pressure at any point in a static fluid in a closed system is changed,
the change in pressure will disperse equally throughout the fluid.
F1/A1 = F2/A2
and
P=F/A
and
F = W = mg
3. Static Pressure and Depth:
P = F/A = ρgh
*Pressure is a function of depth only, not container width or size.
If the container is open at the top, then air pressure adds to the pressure of the
column of liquid. The total pressure can therefore be written as:
13
P = pext + ρgh
4. Buoyancy and Archimedes’ Principle: The upward buoyant force that is exerted on a body
immersed in a fluid, whether fully or partially submerged, is equal to the weight of the fluid that
the body displaces. If the weight of the water displaced is less than the weight of the object, the
object will sink, otherwise the object will float, with the weight of the water displaced equal to
the weight of the object. THE BUOYANT FORCE IS EQUAL TO THE WEIGHT OF THE DISPLACED
WATER:
Fg = ρvdg = FB
a. Objects immersed in water feel lighter.
b. A submerged object will displace water.
c. The volume of the water displaced by the submerged object will equal the volume of
the object submerged.
d. The weight of the water displaced is : Fg=mg. The density of the water displaced is:
ρ=m/v so, m=ρv and then Fg = ρvdg.
e. The volume of the object can be determined by the apparent loss of weight in water. An
object weighing 5N in air and 4.5N submerged in water has a weight of water displaced
of 5N-4.5N = 0.5N and using Archimedes equation Fg = ρvdg we solve for volume (v) with
v = Fg /ρg.
f.
Archimedes' Principle explains why steel ships float
14
5. Fluid in motion: (Pipes):
a. Consider what happens when a fluid passes through a given cross sectional area
each second.
b.The fluid moves with velocity (v) in a time (t) through a segment of cylindrical
pipe.
c. The distance travelled is d=vt.
d.The motion is smooth (Laminar Flow) with no flow resistance (low viscosity).
e. The rate of fluid flow (Q) is the volume of fluid flow out the pie each second.
Q=
𝒗𝒕𝑨
𝒕
= vA.
f. If the flow is laminar, use the equation of continuity to show that as the crosssectional area decreases, the velocity of the fluid increases:
Continuity Equation: A1v1 = A2V2
6. Bernoulli’s Equation: An increase in the speed of the fluid occurs simultaneously with a
decrease in pressure or a decrease in the fluid's potential energy.
𝟏
𝟏
P1 + ρgh1 + 𝟐 𝝆𝒗𝟐𝟏 = P2 + ρgh2 + 𝟐 𝝆𝒗𝟐𝟐
15
7. A fluid at Rest: The difference in pressure is proportional to the difference in levels. The fluid is
at rest, so Bernoulli’s equation reduces to:
ΔP = P2 – P1 = ρgΔh = ρg(h2 – h1)
8. Fluid escaping through a small orifice:
𝟏
𝟐
ρv2 = ρgΔh
v = √𝟐𝒈∆𝒉
R = vA = A√𝟐𝒈∆𝒉
R= Rate of flow.
16
9. A fluid moving horizontally:
a. As the velocity of a moving fluid increases, its static pressure decreases.
b. Bernoulli’s equation reduces due to h1=h2 ,so ρgh is eliminated.
1
2
1
2
P1 + ρgh1 + 𝜌𝑣12 = P2 + ρgh2 + 𝜌𝑣22
P1 +
1
𝜌𝑣12
2
1
= P2 + 2 𝜌𝑣22
ΔP = P1 – P2 = ½ ρ(𝒗𝟐𝟐 − 𝒗𝟐𝟏 )
10. Aerodynamics.
a. A wing moving in level flight has a lifting force acting on it exactly equal to its load.
b. The force is due to the pressure difference between the upper and lower surface of the
wing.
17
XI.
Review Section 11: Thermodynamics
a. Temperature and its measurement.
1. Temperature is the relative measure of heat. It tells you what will lose or gain thermal
energy when the energy is transferred. How hot or cold something is.
b. Molar quantities
1. STP- Standard Temperature and Pressure. (0°C, 1atm). At STP most gasses behave
according to a simple relationship among their pressures, volumes, and absolute
temperatures.
2. The Ideal Gas Law EQUATION of STATE –Applies to the Ideal Gas. An ideal gas has only
elastic collisions, no intermolecular forces and gravity can be ignored, and occupies a small
volume of the total volume available.
3. Molar Mass-The mass of a substance that contains 6.02 x 1023 Molecules. (Avogadro’s
number NA).
4. 1 mole of an ideal gas occupies 22.4L at zero degrees Celsius.
5. The number of moles (n) of a gas:
n=m/M
m = mass
M = Molar mass
b. The Three Gas Laws and the Ideal gas law equation of state.
a. BOYLE’s LAW - An Ideal Gas, sealed in a chamber that is insulated such that no heat can
escape or enter. If an external force placed on a piston at the top of the chamber so that
the pressure change causes the piston to move down the work done to move the piston
is:
W=Fv/A=PV
*If the temperature of the gas remains constant:
PV=Constant or,
18
Boyle’s Law: P1V1=P2V2
b. Gay-Lussac’s Pressure – temperature Law: If Gas is enclosed in a chamber of constant
volume. There is a direct relationship between absolute kelvin temperature of the gas
and the pressure in the chamber. The ratio of pressure to temperature remains
constant:
𝑝
= constant
𝑇
𝑷𝟏 𝑷𝟐
=
𝑻𝟏 𝑻𝟐
TEMPERATURE MUST BE IN KELVIN
c. CHARLES’s LAW- At a constant pressure P, the volume V is directly proportional to the
temperature T:
𝑽𝟏
𝑻𝟏
=
𝑽𝟐
𝑻𝟐
19
d. The IDEAL GAS LAW – Combines the three gas laws into three versions of the Ideal Gas
Law:
𝑷𝟏 𝑽𝟏
𝑻𝟏
=
𝑷𝟐 𝑽𝟐
𝑻𝟐
PV/T =Constant
Pv = nRT
n = number of moles of gas,
n=N/NA (N=#Actual Moles, NA = Avogadro’s number)
R = Universal Gas Constant = 8.31 j/mol k
Pv = NkT
k = Boltzmann Constant
k = R/NA
TEMPERATURES MUST ALWAYS BE IN KELVIN
e. Kinetic-Molecular theory.
1. When thermal Energy is exchanged it is called heat.
2. All thermal energy is in the form of molecular kinetic energy.
3. The average kinetic energy per molecule = (3/2)kT
k = Boltzmann Constant, T=Temperature in Kelvin
4. The total thermal energy of an Ideal Gas is:
3/2NkT
N=Number of molecules
5. The RMS Speed of the Molecules of a gas is given by:
20
𝟑𝒌𝑻
𝒎
Vrms = √
Boltzmann Plot
Velocity distributions depend on temperature and mass. Higher temperature broaden
the velocity distribution. Higher temperatures allow a larger fraction of molecules to
acquire greater amounts of kinetic energy, causing the Boltzmann plots to spread out.
The Maxwell-Boltzmann distribution law considers a large population of molecules
having some fixed amount of kinetic energy. As long as the temperature remains
constant, this total energy will remain unchanged, but it can be distributed among the
molecules in many different ways, and this distribution will change continually as the
molecules collide with each other and with the walls of the container.
c. Work done by expanding gases: W=-PΔV
a. If a gas expands by displacing any substance, the gas is doing positive work to its
environment.
b. The gas transfers energy out of its internal energy.
c. According to the Kinetic-Molecular theory, this internal energy is the kinetic energy of
the molecules.
d. This loss of energy results in temperature going down as the molecules slow down.
e. THE AREA UNDER A PRESSURE-VOLUME CURVE IS THE WORK DONE BY THE GAS
(Representing a loss of energy from the gas). Temperature decrease.
f. For contracting gas, the area under the curve is the work done to the gas (representing
a gain in energy to the gas)
21
d. The Zeroth Law of Thermodynamics- When two objects are brought into contact, heat will flow
from the warmer object to the cooler one until they reach thermal equilibrium. For a closed
system:
ΣQ = 0
Qin= Qout
Q=mcΔT
c = specific heat capacity
Q=mL
m = mass
Q = Heat Energy
Heat transfer during phase change:
Q=mL
L = latent heat of transformation (Fusion or Vaporization)
Heat Transfer and Temperature changes:
Q=mcΔT
Thermal expansion during temperature changes:
ΔL = αLoΔT
α = coefficient of linear expansion
Volumetric Expansion:
ΔV = βVΔT
β = Coefficient of volume expansion
e. The first law of thermodynamics -The change in a system's internal energy is equal to the
difference between heat added to the system from its surroundings and work done by the
system on its surroundings. Q = heat transferred into (Q > 0) or out of (Q < 0) the system. W =
work performed on the system (W > 0) or by the system (W < 0).
ΔU =Q + W
W = -PΔV
ΔU depends only on temperature change (Assuming no Phase changes)
(ΔIf Volume is constant, W=0 and U =Q =mCvΔT)
22
The pressure(p) verses Volume(v) curve (Boyle’s law) shows that the area under the curve is the
work done between some initial state and a final state.
Thermodynamic Processes:
1. Isothermal means “constant temperature”
2. Isobaric means “constant pressure”
3. Isochoric means “constant volume”
4. Adiabatic means “no gain or loss of heat to the system”
Isobaric
f.
The second law of thermodynamics and Heat engines
a. No system is ideal
b. Heat is always lost from a machine due to friction. This friction causes heat loss.
c. Heat flows from a hot reservoir to a cold reservoir.
d. Only a certain amount of energy is needed to do work. The remainder is released as
exhaust at a lower temperature.
e. Entropy(s) is an increase in randomness or disorder of a system.
f. The Second Law of Thermodynamics states:
1. Heat never flows from a cooler to hooter body of its own accord.
2. Heat can never be taken from a reservoir without something else happening to
the system.
3. The entropy of any isolated system is always increasing.
23
g. Reversible process – Heat flows spontaneously from hot to cold, and this action is
irreversible unless acted upon by an outside agent.
h. A system may be reversible if it passes from an initial to final state by way of some
intermediate equilibrium state. This process can be represented on a pressure versus
volume diagram.
i.
Ideal Pressure – Volume Curve (Constant Pressure) Heat added and extracted
j.
A Carnot Cycle P-V cycle:
The Carnot cycle consists of the following four processes:
I.
A reversible isothermal gas expansion process. In this process, the ideal gas in the system
absorbs qin amount heat from a heat source at a high temperature Th, expands and does
work on surroundings.
24
II.
III.
IV.
A reversible adiabatic gas expansion process. In this process, the system is thermally
insulated. The gas continues to expand and do work on surroundings, which causes the
system to cool to a lower temperature, Tl.
A reversible isothermal gas compression process. In this process, surroundings do work
to the gas at Tl, and causes a loss of heat, qout.
A reversible adiabatic gas compression process. In this process, the system is thermally
insulated. Surroundings continue to do work to the gas, which causes the temperature to
rise back to Th.
k. The efficiency of a heat engine is given by:
Efficiency = W/Q = 1-Q2/Q1
l.
The efficiency of a Carnot Engine: The Carnot cycle has the greatest efficiency possible
of an engine.
Maximum Efficiency = 1-T2/T1 where T2>T1
g. Heat transfers
a. Heat can be transferred by conduction, convection, and radiation.
b. The rate of heat transfer (H) is H=ΔQ/t.
c. The rate of heat transfer depends on
1. The temperature difference on either side of the slab. (Δt)
2. The thickness of the slab (L)
3. The frontal area of the slab (A)
4. The thermal conductivity (k) of the material.
𝜟𝑸 𝒌𝑨∆𝑻
= 𝑳
𝒕
H=
XII.
H = Heat (Joules)
Review Unit 12: Modern Physics
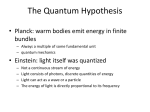
A. Photoelectric Effect- The photoelectric effect occurs when matter emits electrons, called
photoelectrons, upon exposure to electromagnetic radiation, such as photons of light.
25
The photoelectric effect equation: KEmax = hf – hf0
hfo is the work function and is the minimum energy needed to free an electron.
B. Compton Effect and photon momentum -The Compton effect (also called Compton scattering)
is the result of a high-energy photon colliding with a target, which releases loosely bound
electrons from the outer shell of the atom or molecule. The scattered radiation experiences a
wavelength shift that cannot be explained in terms of classical wave theory, thus lending
support to Einstein's photon theory.
Photons exhibit what's known as "wave-particle duality," meaning that in some ways light
behaves as a wave (in that it refracts and can be superimposed on other light) and in other ways
as a particle (in that it carries and can transfer momentum). Even though a photon has no mass
(a property of waves), early physicists found that photons hitting metal could displace electrons
(a property of particles) in what's known as the photoelectric effect.
Determine the light's frequency from its wavelength. The frequency (f) and wavelength (λ) are
related by the equation f = c/λ. Find the energy (E) of a photon using Planck's constant and the
photon's frequency (f) by the equation E = hf. Divide the photon's energy by the speed of light to
get the momentum
C. Matter waves – All matter can exhibit wave-like behavior. For example a beam of electrons can
be diffracted just like a beam of light or a water wave. Matter waves are a central part of the
theory of quantum mechanics, an example of wave–particle duality. The concept that matter
behaves like a wave is also referred to as the de Broglie hypothesis. Matter waves are often
referred to as de Broglie waves.
The de Broglie wavelength is the wavelength, λ, associated with a particle and is related to its
momentum, p, through the Planck constant, h:
λ=
ℎ
𝑝
D. Spectral Lines - A spectral line or a spectra is a dark or bright line in an otherwise uniform and
continuous spectrum, resulting from emission or absorption of light in a narrow frequency
range, compared with the nearby frequencies. Spectral lines are often used to identify atoms
and molecules from their characteristic spectral lines. Can be used to identify the atomic and
molecular components of stars and planets which would otherwise be impossible.
E. Special Relativity – In physics, special relativity is the generally accepted physical theory
regarding the relationship between space and time. It is based on two postulates: (1) that the
laws of physics are identical in all inertial systems (non-accelerating frames of reference); and
(2) that the speed of light in a vacuum is the same for all observers, regardless of the motion of
the light source. Special relativity handles situations involving motions nearing the speed of
light. As of today, special relativity is the most accurate model of motion at any speed. Even so,
26
Newtonian mechanics is still useful (due to its simplicity and high accuracy) as an approximation
at small velocities relative to the speed of light.
Special relativity implies a wide range of consequences, which have been experimentally
verified, including length contraction, time dilation, relativistic mass, mass–energy equivalence,
a universal speed limit, and relativity of simultaneity. Time and space cannot be defined
separately from each other. Rather space and time are interwoven into a single continuum
known as space-time. Events that occur at the same time for one observer could occur at
different times for another.
The theory is "special" in that it only applies the principle of relativity to the special case of
inertial reference frames.
General relativity, also known as the general theory of relativity, is the geometric theory of
gravitation published by Albert Einstein and is the current description of gravitation in modern
physics. General relativity generalizes special relativity and Newton's law of universal
gravitation, providing a unified description of gravity as a geometric property of space and time,
or space-time. In particular, the curvature of space-time is directly related to the energy and
momentum of whatever matter and radiation are present. The relation is specified by the
Einstein field equations, a system of partial differential equations.
F. Mass-energy equivalence - Einstein was able to show that mass and energy were related,
through the famous formula E=mc2. This relationship was proven most dramatically to the
world when nuclear bombs released the energy of mass when they were used in WWII.
E = mc2
G. Atomic structure and Rutherford’s model - He developed the planetary model of the atom
which put all the protons in the nucleus and the electrons orbited around the nucleus like
planets around the sun.
H. The Bohr model –
1. Electrons orbit the nucleus in orbits that have a set size and energy.
2. The energy of the orbit is related to its size.
3. The lowest energy is found in the smallest orbit.
27
4. In order from electrons to change energy levels, electrons must absorb or emit photons.
5. The energy of a photon is given by: E = hc/λ
the constant hc = 1240eV nm.
6. The difference in energy between energy levels is the energy of the photon needed for the
electron to move between the levels. Lowest level is the ground state and has the highest
energy.
7. The frequency of the photon absorbed or given off is found using: f = (Einitial - Efinal)/h
I.
Quantum Mechanics and the electron cloud model
1. Electrons are no longer depicted as particles moving around the nucleus in a fixed orbit.
Instead, we should not know exactly where they are, and hence we describe their probable
location around the nucleus only as an arbitrary ‘cloud’. The electron cloud model is a
product of quantum mechanics.
2. In quantum mechanics, regardless of what the observer knows initially about a particle,
he/she can only predict its succeeding location or momentum in terms of probabilities.
3. At no given time will he/she be able to ascertain either one (location or velocity). In fact,
according to the uncertainty principle, the more you know about the momentum of a
particle, the less you know about its location and vice versa.
J.
Nuclear Structure and stability:
1. The nuclei of all atoms contain positively charged particles, called PROTONS, and neutral
particles called NEUTRONS.
2. ISOTOPES of a given element always contain the same number of protons, but differing
numbers of neutrons.
3. Neutral atoms have no net charge, due to the fact that the charge due to the protons is
exactly balanced by an equal number of negatively charged.
4. ELECTRONS are found outside the nucleus of the atom.
5. Nuclear stability -A particular atom with a specific number of protons and neutrons is called
a NUCLIDE. As the atomic number increases, the nucleus requires additional neutrons for
stability. The ratio of the number of protons (Z) to the number of neutrons (A-Z) has a
bearing on the stability of a nuclide. All elements with an atomic number greater than 84 do
not have stable nuclides.
K. Binding Energy –
1. Nuclei are made up of protons and neutron, but the mass of a nucleus is always less than
the sum of the individual masses of the protons and neutrons, which constitute it.
2. The difference is a measure of the nuclear binding energy which holds the nucleus together.
28
3. This binding energy can be calculated from the Einstein relationship:
Nuclear binding energy = Δmc2
L. Radioactive Decay
1. Nuclides that undergo radioactive decay are known as RADIOACTIVE ISOTOPES or
RADIOISOTOPES.
2. The two most two common types of radioactive decay are: (1) Alpha (α) particle emission
and (2) Beta (β) particle emission. Both of these types of decay may be accompanied by the
emission of very high-energy electromagnetic radiation which is known as γ ("gamma") rays.
a. Alpha (α)-Particle emission occurs when a positive α-particle ( 𝟒𝟐𝑯𝒆) leaves the
nucleus. Since the α-particle is simply the nucleus of a helium atom with mass number
4, the DAUGHTER NUCLIDE which results from this type of decay has a mass number
atomic mass units and an atomic number 2 less than the PARENT NUCLIDE.
b.
In the above example, the isotope of uranium with mass number 238 (the parent
nuclide) decays to the isotope of thorium with mass number 234 (the daughter
nuclide) and an α-particle. α-Particles are not very penetrating, having a range of only
a few centimeters in air.
c. Beta (β)-Particle emission -This occurs when one neutron in the nucleus is converted
to a proton and a high-energy electron, called a β-particle( −10𝑒). Since the mass of the
β-particle is negligibly small compared to nucleons, this type of decay does not change
the mass number, but as the number of protons increases by 1, the daughter nuclide
will have an atomic number 1 larger than the parent nuclide. β-Particles are fairly
penetrating, and may have a range in air up to several meters.
d. Gamma (γ) ray emission - Certain radioactive nuclides emit very penetrating
electromagnetic radiation known as γ-RAYS. These rays are in fact very high energy
photons.
e. The SI unit of radioactivity, the BECQUEREL, Bq is a rate of radioactive decay equal
to one decay per second. The non-SI unit, the CURIE, Ci equals 3.70x1010 decays per
second. Thus, 1 Ci = 3.70x1010 Bq.
29
f.
The half-life of radioisotopes is the time taken for a given sample of a radioisotope
to decay so that its radioactivity is one half the initial amount is called the HALF-LIFE,
t½, of that isotope.
M. Fission
1. When a nucleus fissions, it splits into several smaller fragments. These fragments, or
fission products, are about equal to half the original mass. Two or three neutrons are
also emitted.
2. When a nucleus fissions, it splits into several smaller fragments. These fragments, or
fission products, are about equal to half the original mass. Two or three neutrons are
also emitted.
a.
Nuclear Fission
3. The sum of the masses of these fragments is less than the original mass. This
'missing' mass (about 0.1 percent of the original mass) has been converted into
energy according to Einstein's equation.
N. Fusion
1. Nuclear fusion is the joining of two nuclei to form heavier nuclei.
2. The reaction is followed either by a release or by absorption of energy.
3. Fusion of nuclei with lower mass than iron releases energy while fusion of nuclei heavier
than iron generally absorbs energy.
4. The power of the energy in a fusion reaction is what drives the energy that is released from
the sun and many stars in the universe.
5. Nuclear fusion is also applied in nuclear weapons, specifically, a hydrogen bomb. Nuclear
fusion is the energy supplying process that occurs at extremely high temperatures like in stars
such as the sun, where smaller nuclei are joined to make a larger nucleus, a process that gives
off great amounts of heat and radiation.
6. When uncontrolled, this process can provide almost unlimited sources of energy and an
uncontrolled chain provides the basis for a hydrogen bomb.
30