Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
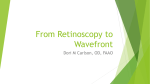
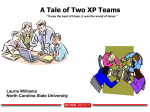
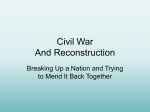
Distributed Wavefront Reconstruction with SABRE for real-time Large Scale Adaptive Optics Control Elisabeth Brunnera , Cornelius de Visserb , João Silvaa , Michel Verhaegena a Delft University of Technology, Delft Center of Systems and Control, Delft, The Netherlands; University of Technology, Faculty of Aerospace Engineering, Delft, The Netherlands; b Delft ABSTRACT We present advances on Spline based ABerration REconstruction (SABRE) from (Shack-)Hartmann (SH) wavefront measurements for large-scale adaptive optics systems. SABRE locally models the wavefront with simplex B-spline basis functions on triangular partitions which are defined on the SH subaperture array. This approach allows high accuracy through the possible use of nonlinear basis functions and great adaptability to any wavefront sensor and pupil geometry. The main contribution of this paper is a distributed wavefront reconstruction method, D-SABRE, which is a 2 stage procedure based on decomposing the sensor domain into sub-domains each supporting a local SABRE model. D-SABRE greatly decreases the computational complexity of the method and removes the need for centralized reconstruction while obtaining a reconstruction accuracy for simulated E-ELT turbulences within 1% of the global method’s accuracy. Further, a generalization of the methodology is proposed making direct use of SH intensity measurements which leads to an improved accuracy of the reconstruction compared to centroid algorithms using spatial gradients. Keywords: Adaptive Optics, Distributed Wavefront Reconstruction, Extremely Large Telescopes, Splines, Wavefront Sensing. 1. INTRODUCTION For the new generation of ground based telescopes, the dimensions of Adaptive Optics (AO) systems are increasing, up to 39m for the European Extremely Large Telescope (E-ELT), such that the computational complexity of the controller prohibits an (unstructured) centralized implementation. We present the advances on our recently introduced novel method for distributed wavefront reconstruction from (Shack-)Hartmann (SH) measurements of the wavefront with application to large-scale AO systems, like the eXtreme Adaptive Optics (XAO) system of the upcoming E-ELT.1, 2 The new method, indicated as D-SABRE (Distributed Spline based ABerration REconstruction),3 is an extension of the recently presented SABRE method4 for wavefront reconstruction which uses B-spline basis functions defined on triangular partitions of the wavefront sensor (WFS) domain. D-SABRE performs a decomposition of the entire WFS domain into a set of sub-domains each supporting a local multivariate spline model. Each local spline model depends only on local WFS measurements, and information is only shared between directly neighboring models. The disadvantage of most state of the art wavefront reconstrction (WFR) methods5–8 is that, even though certain computational operations can be parallelized, they are based on non-distributed principles. Linear computational complexity orders have been reached but it is important to note that these numbers are WFS-array wide, or global, numbers. With D-SABRE, a truly distributed method is presented which is suitable to operate on massively parallel hardware architectures. The method is demonstrated on simulated E-ELT turbulence wavefronts and compared with the centralized SABRE algorithm. We show that the D-SABRE obtains a reconstruction accuracy that is within 1% of the reconstruction accuracy of the global (non-distributed) SABRE method. Further, we discuss a generalization of the SABRE methodology making direct use of the intensity measurements in the detector of the SH sensor without the need to first compute the spatial gradients as with the Further author information: (Send correspondence to E.B.) E.B.: E-mail: [email protected] C.d.V.: E-mail: [email protected] standard centroid algorithms.9 This generalization can be applied in the case of small aberrations and preserves the parallel linear least squares solution with distributed communication to guarantee global smoothness. In a simulation study it is shown that this generalization leads to an improved accuracy of the SABRE wavefront reconstruction for small aberrations, as provided in a closed loop setting, if compared to SABRE making use of spatial gradient calculations via centroid type of algorithms. This paper is organized as follows. The SABRE method is summarized in Section 2, where next to the original WFR for SH slope measurements, the new option for reconstruction from the intensity distributions of the SH sensor is introduced. The novel distributed solution is presented in Section 3. Both sections are concluded with numerical results, comparing the two extensions, reconstruction from intensities on the one hand and distributed reconstruction on the other, with the original centralized SABRE for SH slope measurements. 2. WAVEFRONT RECONSTRUCTION WITH B-SPLINES In this section, a short overview to B-splines and their application for wavefront modelling in SABRE is given, based on the proposal of De Visser and Verhaegen who presented SABRE as WFR method from spatial gradient measurements.4 Next to the SABRE model for SH slope measurements, a linear relationship between the intensity patterns in the detector plane of the SH sensor and the incoming wavefront represented by a multivariate spline model is established leading to an extension of the methodology which makes direct use of the intensity measurements. For both types of measurements, the SABRE method computes an estimate of the wavefront as a constrained least-squares (LS) solution. 2.1 Preliminaries on B-splines B-splines are defined locally on simplices, which correspond in the 2-dimensional case to triangles t, each defined by three non-degenerate vertices (v0 , v1 , v2 ) ∈ R2×3 , and evaluated for (x, y) ∈ R2 with the Barycentric coordinate system. For a triangle t with vertices (v0 , v1 , v2 ), the Barycentric coordinates (b0 , b1 , b2 ) of a point (x, y) in the Cartesian plane are given by b1 −1 x =V , b0 = 1 − b1 − b2 , (1) b2 y with transformation matrix V = [v1 − v0 , v2 − v0 ]. On the triangle t, the Bernstein polynomials ( d! bκ0 bκ1 bκ2 , (x, y) ∈ t d Bκ (b(x, y)) = κ0 !κ1 !κ2 ! 0 1 2 0 , (x, y) ∈ /t (2) of degree d, with |κ| = κ0 + κ1 + κ2 = d and κ0 , κ1 , κ2 ≥ 0 give a local basis. A linear combination of the Bernstein polynomials yields then the B-form polynomial (P t d |κ|=d cκ Bκ (b(x, y)) , (x, y) ∈ t p(b(x, y)) = (3) 0 , (x, y) ∈ /t of degree d on the simplex t. In order to obtain a global B-spline, a triangulation T of J adjacent simplices ti is constructed on the considered domain as T = J [ ti , ti ∩ tj = {∅, t̃} , ∀ ti , tj ∈ T , (4) i=1 where t̃ is either a vertex or an edge. With (3), a local B-form polynomial is defined on each triangle ti , ˆ ˆ i = 1, ..., J, by a local coefficient vector cti ∈ Rd×1 and a vector Bdti (b(x, y)) ∈ R1×d containing the local B-spline (2+d)! basis functions, where dˆ = 2d! is the number of basis functions per triangle.10 A global B-spline polynomial on triangulation T is then obtained by p(b(x, y)) = Bd (x, y)c , (5) ˆ with global coefficient vector c := [ct1 , ..., ctJ ] ∈ RJ d×1 and B-form vector Bd (x, y) := [Bdt1 (b(x, y), ..., BdtJ (b(x, y)] ˆ ∈ R1×J d . The local B-form polynomials are joined to a smooth spline polynomial by enforcing continuity for the first r derivatives of the spline at the edges of neighbouring simplices through equality constraints Ac = 0 . (6) The smoothness matrix A contains equations establishing relationships between the basis coefficients of neighbouring simplices.11 The principle is visualised in Fig. 1, where on the left four spline polynomials pi , i = 1, ..., 4 are constructed on single triangles, which are then joined to an adjacent triangulation. On the domain covered by this triangulation, a smooth spline polynomial p is obtained after the equality constraints on the coefficients of the local polynomials pi are enforced. Figure 1. Concept of B-splines: Local spline polynomials defined on triangles (left) are joint to a global, smooth polynomial defined over a triangulation (right). 2.2 THE SABRE MODEL FOR (SHACK-) HARTMANN SENSORS The SABRE method defines a triangulation on the SH subaperture array and the unknown wavefront φ(x, y) is approximated at any point (x, y) in a the WFS domain with a B-spline polynomial φ(x, y) ≈ Bd (x, y)c, (7) with Bd (x, y) the global vector of B-spline basis functions and with c the global vector of B-coefficients. In order to retrieve the wavefront estimate of form (7) from SH measurements, a model of the relation between the measurements and wavefront in terms of the coefficient vector c is needed. 2.2.1 Linear model for slope measurments A SH sensor consists of an array of N apertures which sample the incoming wavefront by approximating the local spatial slopes of the wavefront in each subaperture using the center of mass of the intensity measurements collected by the corresponding area in the detector. This enables the formulation of the wavefront reconstruction problem as a linear (least-squares) problem. To obtain the SABRE model for SH slope measurements a tringulation is defined on the (reference) centers of the subapertures in the SH arry as depicted in the left scheme of Fig. 2. The example of a Type II triangulation is shown for which four triangles are defined in each rectangular unit marked by the subaperture centers. Note that no requirements are posed on symmetry, alignment or shape of the SH array. For a vector s ∈ R2N ×1 of local wavefront slopes, De Visser and Verhaegen4 formulated the SABRE sensor model as follows: s = dBd−1 Pd,d−1 c + n, u (8) with n ∈ R2N ×1 a residual noise vector. The spline regression matrix built with Bd−1 , the global basis function matrix of degree d − 1 which is constructed according to Equ. (2), and with Pd,d−1 the full-triangulation de u Casteljau matrix which is constructed in a block diagonal fashion using per-triangle de Casteljau matrices.4 Type II Triangulation for SH slopes Type II Triangulation for SH intensities Figure 2. Type II triangulations represented by fine black lines for slope (left) and intensity (right) measurements of a 3 × 3 SH array (subapertures and measurements highlighted in grey). The support locations of the triangulation are depicted as circels and given by the (reference) centers of SH array in case of slope and by subaperture corners in case of intensity measurements. The corners of all defined triangles give the set of vertices. 2.2.2 Intensity model The slope measurements provided by the SH sensor are obtained using the center of mass of the pixel pattern computed with the centroid algorithm, hence not all the information present in the intensity patterns is used. Silva et al.12, 13 recently proposed a novel method based on a decentralized linearization of the relationship between the local wavefront aberrations in each subaperture and the corresponding intensity pattern in the detector. This approach preserves the linearity of the WFR problem, and it makes direct use of the intensity measurements. Similar to the previous section, a triangulation is defined on vertices distributed in the SH pupil plane, whereas now the support points are located at the corners of the subapertures as sketched on the right in Fig. 2. Provided that the aberrations are small, which is given in a closed loop AO system, one can assume that the part of the wavefront seen by one subaperture has a minimal effect on the intensity pattern in the part of the detector which corresponds to another subaperture. The literature14 provides a nonlinear model In (m) of the intensity triggered in each detector pixel m by the local wavefront φn for the subapertures n = 1, ..., N . On each subaperture n, a local SABRE model is defined as φn (x, y) ≈ Bdn (x, y)cn ˆ ˆ for local B-form matrix Bdn (x, y) ∈ R1×Jn d and local coefficient vector cn ∈ RJn d×1 , where Jn is the number of triangles per subaperture. In order to obtain a linear relation between the coefficients cn and the intensity distribution of subaperture n, a first order Taylor expansion around cn = 0 approximates the nonlinear model in each pixel m = 1, ..., M : ∂In (m) T In (m) ≈ In (m)|cn =0 + cn . (9) ∂cn cn =0 Hence, we obtain a linear model of the intensity distribution in ∈ RM ×1 of subaperture n in terms of the local coefficient vector cn with in = j n + J n c n + e n . (10) where the noise vector en ∈ RM ×1 accounts for both the approximation error of the linearization and the readT out noise. The zero order term in (10) is defined as j n = [In (1)|cn =0 , ..., In (M )|cn =0 ] ∈ RM ×1 and the Jacobian iT h ˆ , ..., ∂In (M ) ∈ RM ×Jn d . is the full matrix Jn = ∂In (1) ∂cn cn =0 ∂cn cn =0 This procedure is repeated independently for each subaperture leading to a global SABRE model of the wavefront as in (7) and to the global SABRE sensor model for SH intensity measurements i = j + Jc + e , (11) for which i, j and e ∈ RN M ×1 are simply a concatenation of their subaperture local counterparts and the global ˆ Jacobian is defined as J = diag[J1 , ..., Jn ] ∈ RN M ×J d . The blockdiagonal structure of J stems from the fact that the imaging process is assumed to be not correlated between the subapertures. 2.3 Centralized least-squares solution With the linear sensor models for SH slope measurements in (8) and for SH intensity measurements in (11) introduced in the previous section, we can now define the global SABRE wavefront reconstruction problem as minimize ky − Dck22 subject to Ac = 0 , (12) ˆ where c ∈ RJ d×1 is the coefficient vector of the global SABRE wavefront model (7). For SH slope measurements, ˆ we set regression matrix D := dBd−1 Pd,d−1 ∈ RJ d×2N and measurement vector y := s ∈ R2N ×1 ; for intensity u ˆ measurements it is D := J ∈ RJ d×M N and y := i − j ∈ RM N ×1 . The global constraint matrix A enforces smoothness on the obtained estimate. The constraint optimization problem in Equ. (12) leads to the following least-squares estimator for the B-coefficients of the simplex B-spline: −1 T ĉ = NA (DT DA s A DA ) with DA := DNA , (13) where NA is the projection matrix onto the null space of constraint matrix A. The SABRE reconstrucion matrix −1 Q := NA (DT DA can be precomputed for a given geometry. The estimated wavefront values can now be A DA ) computed from SH measurements y as φ̂(x, y) = Bd (x, y)Qy (14) at locations (x, y) for a preevaluated spline B-form matrix Bd (x, y). Note that the B-form matrix and hence the wavefront estimate can be evaluated at any location in the triangulation (see Fig. 2). 2.4 Numerical results In a numerical experiment, the two versions of the spline based method for SH slope measurements (SABRE-S) and SH intensity measurements (SABRE-I) are compared in terms of reconstruction accuracy. Residual RMS of global SABRE for slopes vs. intensities 2 10 Slopes, d=1, r=0 Intensities, d=1, r=0 1 10 RMS residual [rad] 0 10 −1 10 −2 10 −3 10 −4 10 −6 10 −4 10 −2 10 RMS aberration [rad] 0 10 2 10 Figure 3. Comparison of the average residual RMS as a function of aberration strength between SABRE-I using intensities and SABRE-S using slope measurements. A Fourier based Hartmann sensor was used to simulate measurements from a grid of 10 by 10 subapertures with 25 pixels per subaperture side. The sensor was considered to suffer predominantly the effects of read-out noise on the detector, which was modelled as white and Gaussian with zero-mean and of standard deviation σnoise . The noise is additive and affects the normalized intensity distribution values, which are then used for reconstruction with SABRE. To apply the original version of SABRE for slope measurements the local gradients are computed with the centroid algorithm from the same intensity distributions. With this simulation, we show the superior performance of SABRE-I in comparison with SABRE-S for slopes in the small aberration range. Wavefronts perturbated by aberration of increasing strength, represented in terms of their RMS values from 10−6 rad to 102 rad, were generated according to the Kolmogorov atmospheric turbulence model. For each aberration, we computed 100 realisations of Hartmann intensity measurements which are corrupted by noise of standard deviation σnoise = 4 × 10−4 . A SABRE model using B-Splines of degree d = 1 and continuity order r = 0 was defined on a Type II triangulation (i.e. four triangles per rectangular unit as depicted in Fig. 2). In Figure 3, the averaged RMS residual of the reconstructed wavefronts is plotted over the RMS values of the uncorrected wavefront, comparing the results of SABRE-S with SABRE-I. It shows that SABRE-I yields an RMS error approximately 1 order of magnitude lower than SABRE-S for aberrations with an RMS value in the range of 10−3 rad to 1 rad. For aberrations of RMS larger than 10 rad, the diffraction pattern corresponding to a subaperture will affect the intensity pattern originating from other subapertures. In that case, the locality assumption presented in Section 2.2.2 is not verified and the SABRE-I performs poorer than reconstruction from slope measurements. Due to the influence of read out noise on the intensity measurements, the RMS error values for both versions of SABRE reach a lower threshold when the aberrations imposed are smaller than 0.01 rad. 3. DISTRIBUTED WAVEFRONT RECONSTRUCTION WITH SABRE In this section, we discuss an extension of SABRE which is suitabe for distributed WFR and introduce a 2 stage algorithm that forms the spline based distributed wavefront reconstruction method (D-SABRE).3 In the last part of this section, the results from numerical experiments with the D-SABRE are presented. These experiments are aimed at validating the D-SABRE method by comparing its reconstruction accuracy to the centralized SABRE. 3.1 Two stage method The D-SABRE method is based on the decomposition of the global WFR problem from (12) into a set of local sub-problems. First, we decompose the global triangulation T into a set of G sub-triangulations as follows: T = G [ Ti , (15) i=1 where every sub-triangulation Ti in turn consists, as depicted in Fig. 4, of a core part Ωi and an overlap part Ξi for i = 1, ..., G such that Ti = Ωi ∪ Ξi and Ωi ∩ Ξi = ∅ . (16) The purpose of Ξi is to overlap neighboring sub-triangulation core parts Ωj in order to increase numerical continuity between neighboring partitions obtained with the local WFR that is performed in parallel and presented in the next section. The term Overlap Level (OL) defines the size of Ξi . The OL is a scalar, which determines how many layers of triangles from the neighboring core partitions are included in Ξi as illustrated in Figure 4.3 3.1.1 Local SABRE reconstruction In the first stage of the D-SABRE method, we approximate the wavefront locally on each sub-triangulation Ti as follows: φi (x, y) ≈ Bdi ci , 1 ≤ i ≤ G , (17) where φi (x, y) is the local wavefront phase, Bdi (x, y) the local matrix of B-form regressors and ci the set of local B-coefficients. To determine ci for all G local models the following local SABRE WFR problems have to be solved, which can be done in a fully parallel manner: minimize ky i − Di ci k22 subject to Ai ci = 0, 1 ≤ i ≤ G, (18) Figure 4. An OL-0 partitioning without overlap (left) and an OL-2 partitioning with 2 levels of overlap between partitions (right) using the same initial triangulation containing 200 triangles. where the local measurement vector y i and system matrix Di are given by the respective sensor models defined according to Section 2.2.2. Note, that the local constraint matrices Ai are created for each subproblem i and cannot be obtained by decomposing the global constraint matrix A into G blocks because it is not block diagonal. Therefore Ai does not contain any smoothness conditions linking a partition i to any other partition. The B-coefficients ci of the local spline functions can now be estimated from the local set of WFS measurements y i using the local least squares estimator3 −1 T ĉi = NA,i (DT DA,i y i A,i DA,i ) with DA,i := Di NA,i , (19) −1 T where the local SABRE reconstruction matrix Qi := NA,i (DT DA,i and NA,i is the null space projector A,i DA,i ) of the local constraint matrix Ai . The local estimate (19) does not depend on information from any other partition, and as a result, each of the G local reconstruction problems can be solved in parallel. 3.1.2 Distributed piston equalisation and smoothing procedure Applying the distributed local WFR from Section 3.1.1 results in a discontinuous global wavefront, like it is shown in the upper right plot in Fig. 5. In order to equalize the phase offsets between neighboring D-SABRE partitions, a process called Distributed Piston Mode Equalization (D-PME) was introduced by De Visser.3 The D-PME offsets an entire D-SABRE partition i with a single constant ki such that the maximum phase offset between it and a neighboring partition is minimized. This procedure consists of a distributed iterative algorithm which takes advantage of a key property of B-splines. The B-coefficients of the local basis in each triangle correspond to a location in this geometrical unit. The values of the spline function at all vertices are equal to the value of the coefficient located at those. Hence there is no need to evaluate the local spline polynomials after the first stage to obtain the values of wavefront estimates φ̂i (x, y) at the edges of the partitions. The respective B-coefficients computed in (19) can directly be used to compute the piston offsets between the wavefront patches. The algorithm for the iterative D-PME forms Stage 2 of D-SABRE and is performed in each partition i by the following algorithm. Let cΩi,m ∈ RJi,m be the vector of Ji,m B-coefficients located at vertices in the core part of partition i which are shared with the core part of neighboring partition m ∈ Mi , where Mi is the index set of all neighbor partitions of partition i. As the core parts of neighboring partitions do not overlap, these vertices are located at the edge of both core parts. Now be cΩm,i a vector containing the respective B-coefficients computed in partition m at the vertices shared with partition i. After fixing the coefficient vector of one partition as reference, the distributed D-PME algorithm given by di,m = cΩi,m (l) − cΩm,i (l) , ki (l) = max {d¯i,m } , m∈Mi ,m>i ci (l + 1) = ci (l) + ki (l) , ∀m ∈ Mi , m > i (20) (21) (22) Figure 5. Top: Original wavefront (left); The D-SABRE model after completion of the distributed local reconstruction stage(right). Bottom: D-SABRE model after completion of D-PME stage, with remaining discontinuities exaggerated (left); D-SABRE model after completion of the distributed post-smoothing stage (right). with d¯i,m the average of the piston offsets di,m at the shared vertices, is applied in each partition i and converges after l = L iterations. In the lower left plot of Fig. 5, the D-PME method has been applied to the discontinuous reconstructed wavefront obtained with Stage 1. The D-PME minimizes the unknown phase offsets between local D-SABRE partitions, but in general does not create continuity at the edges of the partitions. In order to obtain a globally smooth wavefront, a Distributed Dual Ascent Smoothing (D-DAS) procedure which is based on a dual decomposition approach15 was proposed for Stage 2 of the D-SABRE.3 The D-DAS not only eliminates the piston offsets, but also enforces smoothness between local D-SABRE partitions and is defined as follows: −1 ci (l + 1) = ĉi (l) − (DT (Hi )T y i (l) , A,i DA,i ) (23) y i (l + 1) = y i (l) + α(l)Hi,M ci,M (l + 1)) , (24) where ĉi is defined as the local LS estimate computed with (19) in Stage 1 and DA,i is the local system matrix of partition i projected onto the nullspace of local constraint matrix Ai . Two submatrices Hi and Hi,M of the global constraint matrix A are constructed for each partition i. The submatrix Hi contains blocks that only influence B-coefficients inside the partition i. The second submatrix Hi,M contains all blocks of A that influence B-coefficients inside the partition i as well as B-coefficients in neighboring partitions m through the action of the continuity conditions. We define y i as the dual vector of constraints in A affecting the local B-coefficient vector ci . Vector ci,M contains all B-coefficients in partition i as well as all B-coefficients in directly neighboring partitions that are subject to continuity conditions linked to partition i. Even though more exchange of information is needed for D-DAS than for D-PME in the second post smoothing stage, the procedure does not require global communication and is fully distributed. The results presented in the following section were obtained with an updated version of the D-DAS procedure which includes the D-PME principle into the dual ascent smoothing to speed up the convergence of the latter by merging the operations from (20) to (24) (publication in preparation16 ). From this point, the D-DAS algorithm is considered as an optional extension to the D-PME procedure, which is called if a globally smooth wavefront estimate is asked for. 3.2 Numerical results The D-SABRE algorithm is validated with a numerical experiment in which its reconstruction accuracy is compared to that of the global SABRE method.4 For this experiment, a Fourier optics based Shack Hartmann lenslet array is used to obtain wavefront slopes from a set of 100 simulated wavefronts. The SH lenslet array consists of 2500 lenslets, laid out in a 50 × 50 grid. For each of the 100 wavefront realizations, 10 different signal to noise ratio (SNR) values are used. The local SABRE models were defined on a Type I triangulation (i.e. two triangles per rectangular unit instead of four as in Fig. 2) using B-Splines of degree d = 1 and continuity order r = 0. Residual RMS of DSABRE vs. global SABRE 1 10 Strehl ratio of DSABRE vs. global SABRE 1 0.9 0.8 0 0.7 RMS [rad] Strehl ratio [−] 10 −1 10 0.6 0.5 0.4 0.3 global SABRE DSABRE − No D−DAS (OL−0) DSABRE − No D−DAS (OL−1) DSABRE − No D−DAS (OL−4) DSABRE + D−DAS (OL−1) DSABRE + D−DAS (OL−4) −2 10 0 10 20 30 40 Signal to Noise Ratio [dB] global SABRE DSABRE − No D−DAS (OL−0) DSABRE − No D−DAS (OL−1) DSABRE − No D−DAS (OL−4) DSABRE + D−DAS (OL−1) DSABRE + D−DAS (OL−4) 0.2 50 60 0.1 0 10 20 30 40 Signal to Noise Ratio [dB] 50 60 Figure 6. Comparison of average residual RMS (left) and average Strehl ratio (right) as a function of signal to noise ratio for different D-SABRE variants. In Figure 6, the average Strehl ratio and the average residual RMS for the 100 reconstructions obtained with D-SABRE are compared to that of the global SABRE as a function of the SNR. We consider a decomposition of the global triangulation into 50 partitions. D-SABRE was applied for different overlap levels (OL) and for 30 iterations of either D-PME for piston offset minimization only or for the same number of iterations of D-PME plus additional smoothing with D-DAS. From these figures it can be seen that the D-SABRE is for all versions less resilient to noise than the SABRE, but significant performance differences only start to occur for SNR values below 10dB. Furthermore, it shows that the overlap level has a significant influence on reconstruction accuracy and noise resilience. By including the D-DAS step in Stage 2 the reconstruction performance is further improved, but the experiment shows that the improvement obtained by increasing the OL from 1 to 4 can exceed the benefit of including the D-DAS step. This is also of advantage in a computational sense, since the communication between the processors which is necessary for the D-DAS step could, for certain parallel hardware as GPUs, be a bigger limitation to the speed up compared to the additional computational load in each processor for a local WFR with bigger values for OL. In Figure 7, the experiment was repeated for D-SABRE with different numbers of partitions in the decomposition of the triangulation and the results compared to the global SABRE. An OL of 1 triangle was used and 30 iterations of D-PME with D-DAS were performed in the second stage. It can be seen that D-SABRE shows decreasing resilience to noise for increasing number of partitions, but in all three cases of 25, 100 and 625 partitions significant loss in performance only shows for SNR values below 15 dB. At a signal to noise ratio of 15 dB, D-SABRE performs with a Strehl ratio of ≈ 0.9 for 625 partitions, which corresponds to WFR on subtriangulations of only 4 triangles compared to 2500 triangles for the global SABRE, and a drop of only 7 percent points in Strehl compared to 25 partition. Residual RMS of DSABRE vs. global SABRE 1 10 Strehl Ratio of DSABRE vs. global SABRE 1 0.9 0.8 0 0.7 RMS [rad] Strehl ratio [−] 10 −1 10 0.6 0.5 0.4 0.3 global SABRE DSABRE (25 partitions) DSABRE (100 partitions) DSABRE (625 partitions) Uncorrected Wavefront −2 10 0 10 20 30 40 Signal to Noise Ratio [dB] global SABRE DSABRE (25 partitions) DSABRE (100 partitions) DSABRE (625 partitions) 0.2 50 60 0.1 0 10 20 30 40 Signal to Noise Ratio [dB] 50 60 Figure 7. Comparison of average residual RMS (left) and average Strehl ratio (right) as a function of signal to noise ratio of D-SABRE for different number of partitions. 4. CONCLUSION In this paper, two extensions of the wavefront reconstruction method SABRE (Spline Based ABerration REconstruction) from SH measurements are presented, which aim at reducing the computational complexity of the method on the one hand and at increasing the accuracy of the reconstruction on the other hand. Firstly, we discussed a novel method indicated as D-SABRE (Distributed-SABRE) which is based on a decomposition of the entire SH sensor domain into a set of G sub-domains each supporting a local multivariate spline model. D-SABRE consists of two stages which are both distributed operations. The first stage is a fully decentralized linear least squares calculation of the local SABRE models using local wavefront measurements only. In stage two, iterative distributed optimization requiring communication with direct neighboring models treats the piston offset between the local reconstructions and the smoothness of the full wavefront profile over the total SH aperture. The decentralized and distributed solutions can run on multi-core hardware, such as standard GPU processors. When G partitions have been defined with one processor for each submodel, then D-SABRE can obtain a speedup factor of O(G2 ) over global centralized, single processor methods for large scale wavefront reconstruction problems. The method was demonstrated on simulated E-ELT turbulence wavefronts and a comparison of the results with the centralized SABRE algorithm is done. We showed that the D-SABRE obtains a reconstruction accuracy that is within 1% of the reconstruction accuracy of a global (non-distributed) method. Different versions of the D-SABRE method were tested for reconstruction accuracy and the resilience to noise was analysed for increasing number of partitions in the sensor domain which corresponds to the number G of processors on which the computational load can be distributed. Secondly, a generalization of the SABRE method to intensity measurements of the SH sensor was presented which eliminates the need of spatial gradient computation. A distributed linearization of the model describing the imaging process in each subaperture allows the estimation of the wavefront from the intensity distribution in the detector with a linear least squares solution which is valid for small aberrations. This second extension was demonstrated in simulation for a Hartmann sensor and compared to SABRE for slope measurements. Making directly use of the intensity distribution without loosing information in the centroid computation to approximate the spatial gradients, we could show a clear improvement of the reconstruction accuracy for the mentionned aberration range in comparison with SABRE for slope measurements. Due to the subaperture local nature of the linearization procedure, this generalization of SABRE to intensity measurements can also be integrated with the distributed D-SABRE method. REFERENCES [1] Korkiakoski, V. and Vérinaud, C., “Simulations of the extreme adaptive optics system for epics,” in [Adaptive Optics Systems II ], Ellerbroek, B. L., ed. (2010). [2] Kissler-Patig, M., “Overall science goals and top level AO requirements for the E-ELT,” in [First AO4ELT conference], (2010). [3] De Visser, C. C. and Verhaegen, M., “Distributed wavefront reconstruction using measurements of the spatial derivatives of the wavefront for real-time large scale adaptive optics control,” in [European Control Conference], (2014). [4] De Visser, C. C. and Verhaegen, M., “Wavefront reconstruction in adaptive optics systems using nonlinear multivariate splines,” Journal of the Optical Society of America 30, 82–95 (2013). [5] Rosensteiner, M., “Cumulative reconstructor: fast wavefront reconstruction algorithm for extremely large telescopes,” Journal of the Optical Society of America 28, 2132–2138 (2011). [6] Gilles, L., Vogel, C. R., and Ellerbroek, B. L., “Multigrid preconditioned conjugate-gradient method for large-scale wave-front reconstruction,” Journal of the Optical Society of America 19, 1817–1822 (2002). [7] Poyneer, L. A., Gavel, D. T., and Brase, J. M., “Fast wave-front reconstruction in large adaptive optics systems with use of the Fourier transform,” Journal of the Optical Society of America 19, 2100–2111 (2002). [8] Thiebaut, E. and Tallon, M., “Fast minimum variance wavefront reconstruction for extremely large telescopes,” Journal of the Optical Society of America 27, 1046–1059 (2010). [9] Carvalho, L. A., “A simple and effective algorithm for detection of arbitrary HartmannShack patterns,” Journal of Biomedical Informatics (2004). [10] De Visser, C., Global Nonlinear Model Identification with Multivariate Splines, PhD thesis, Delft University of Technology (2011). [11] De Visser, C. C., Chu, Q. P., and Mulder, J. A., “A new approach to linear regression with multivariate splines,” Automatica 45(12), 2903–2909 (2009). [12] Silva, J., Brunner, E., Polo, A., De Visser, C. C., and Verhaegen, M., “Wavefront reconstruction using intensity measurements for real-time adaptive optics,” in [European Control Conference], (2014). [13] Silva, J., Distributed Wavefront Reconstruction for Adaptive Optics Systems, Master’s thesis, Delft University of Technology (2014). [14] Goodman, J. W., [Introduction to Fourier Optics ], Roberts and Cia. Publ. (2005). [15] Boyd, S., “Distributed optimization and statistical learning via the alternating direction method of multipliers,” Foundation and Trends in Machine Learning 3 (2010). [16] De Visser, C. C., Brunner, E., and Verhaegen, M., “On distributed wavefront reconstruction for large scale adaptive optics systems,” Journal of the Optical Society of America . In preparation.