Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Hooke's law wikipedia , lookup
Brownian motion wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Hunting oscillation wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Jerk (physics) wikipedia , lookup
Velocity-addition formula wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Seismometer wikipedia , lookup
Four-vector wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
Coriolis force wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Special relativity wikipedia , lookup
Equations of motion wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Classical mechanics wikipedia , lookup
Derivations of the Lorentz transformations wikipedia , lookup
Centripetal force wikipedia , lookup
Mechanics of planar particle motion wikipedia , lookup
Frame of reference wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Centrifugal force wikipedia , lookup
Fictitious force wikipedia , lookup
Classical central-force problem wikipedia , lookup
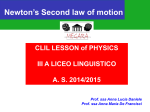
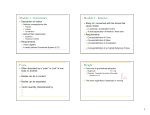
3. Force and motion 3.1. Newton’s First Law The first scientist who discovered that moving with constant velocity does not require a force was Isaac Newton (observing the frictionless motion of the Moon and the planets). This is determined by the law If no net (resultant) force acts on a body, the body’s velocity cannot change; that is, the body cannot accelerate. If Fr 0, then a 0 The reference frame in which the first law holds is called an inertial frame. If several forces act on a body, we determine the net force as a vector sum of all forces (the net force of two forces is shown in the figure) . Fr FA FB 1 3.2. Newton’s Second Law The relation between the net force Fr applied on an object, its mass m and the resulting acceleration a is given by Newton’s second law Fr m a for m const (3.1) The net force acting on a particle is equal to the product of the particle mass and its acceleration (for constant mass). In the case when mass m varies, the more general expression for the force is used dp (3.1a) Fr where p m v dt The net force acting on a particle is equal to the time rate of change of the momentum The linear momentum (simply momentum) is a vector quantity which is changed only by the external net force. 2 Newton’s second law, cont. Eq. (3.1a) transforms into (3.1) for a constant mass m d(m v) dv dm dv Fr m v m ma dt dt dt dt Newton’s second law can be considered as a definition of force acting on a particle. In many cases we know the force from experience and need to know the path of a particle. In this case one solves the so called equation of motion enabling to find r (t ) . d 2 r t d r m F r , ,t dt 2 dt Example: forces acting on a body on the ramp weight Q = mg reaction (normal) force N frictional force , in general defined as F ≤ μ N, where μ - coefficient of friction 3 Forces acting on a body on the ramp, cont. Equation of motion (II Newton’s law): N Q F ma Sum of forces N and Q on the left side of equation is a vector, which magnitude is equal Q sin and then the above equation can be written in a scalar form as Q sin F ma When frictional force F has its maximum value one obtains mg sin mg cos ma and finally a g(sin cos ) 4 3.3. Newton’s Third Law When two bodies interact by exerting forces on each other, the forces are equal in magnitude and opposite in direction. FAB - force on A from (or due to) B, FBA - force on B from A. This can be written as the vector relation FAB FBA (3.2) Eq. (3.2) holds when both forces are measured at the same time. In the atomic scale the third law is not always obeyed. 5 3.4. Inertial and noninertial reference frames The reference frame is “inertial” if Newton’s three laws of motion hold. In contrast, reference frames in which Newton’s laws are not obeyed are labeled “noninertial.” The frame which rests (or moves with constant velocity) in respect to the distant „stable” stars is inertial. The Earth in many practical cases can be considered as inertial. We should remember however, that the Earth rotates around its axis which gives a small acceleration. On the equator one gets v2 4 2 cm 2 a1 R z 2 R z 3,4 2 Rz T s Rz – Earth’s radius T = 24 hrs The circular motion around the Sun is a couse of another acceleration a2 4 2 3 10 s 7 2 1,5 1013 cm 0,6 cm s2 6 3.5. Inertial forces In order to use Newton’s laws in noninertial frames, one introduces apparent forces called inertial forces. In the inertial frame the applied force F results in acceleration ai F m ai (3.3) In the noninertial frame moving with acceleration a0 vs. the inertial frame this accelaration is equal a ai a0 Hence ai a a0 Introducing above into (3.3) one gets in the inertial frame F m a a0 (3.4) 7 Inertial forces, cont. Eq. (3.4) can be transformed as follows ma F ma0 ma F F0 where F0 m a0 is the inertial force. (3.5) According to (3.5) the sum of real and apparent forces is employed to write the second Newton’s law in the noninertial reference frame. Example of an inertial force In the rotating reference frame one introduces the apparent force called centrifugal force F0 . The centripetal acceleration of the reference frame is equal a0 2 , where ω – angular velocity, ρ – radius of the circle. In this case in the rotating frame where the particle is at rest one obtains Q R F0 0 , where the centrifugal force is given by F0 ma0 m 2 . 8 4. Galileo’s Transformation We select two inertial reference frames S and S’ where S’moves in respect to S with a constant velocity v0 along the x –axis. Assumptions (following from eperiments): • t = t’ • measurements of length in both frames give the same results (i=i’, j=j’, k=k’) If for t=t’=0 the origins O and O’ coincide, then according to the assumptions one obtains or r r v t i 0 i x j y k z i x j y k z v 0t i From the above equation it folows that: x x v 0t y y z z t t x x v 0t y y z z t t Galileo’s reverse transformation (4.1) transformation (GT) GT is a base of the classical relativity principle: fundamenal laws of physics are the same in two reference frames for which Galileo’s transformation holds. 9 Transformation of velocity If position vectors r and r are functions of time, then making use of GT and diferentiating vs. time one obtains dx dx v0 dt dt dy dy dt dt dz dz or dt dt v v v 0 (4.2) v v v0 It can be then concluded that observers in different reference frames register different velocities. The velociy has no absolute meaning. v0 Transformation of acceleration Taking the time derivative of Eq.(4.2), one obtains d v d v' d v 0 dt dt dt v Because 0 is constant, the last term in above equation is zero and one gets d v d v' dt dt a a Observers on different frames register the same acceleration, in other words acceleration is invariant vs. GT. 10 The law of momentum conservation vs. GT The law of momentum conservation in particular applies for collisions. For the S frame one can write for two colliding particles with velocities v1 and v 2 m1 v1 m2 v 2 const (4.3) Making use of GT transformation for velocity v1 v1 v 0 v2 v2 v0 one obtains the expession valid for reference frame S’ m1 v1 m1 v 0 m2 v 2 m2 v 0 const or m1 v1 m2 v 2 const m1 m2 v 0 (4.4) The right side of Eq.(4.4) is constant ( v 0 const ), hence the law of momentum conservation is also valid in the moving frame S’. Conclusion: The law of momentum conservation is invariant in all inertial frames moving at constant velocities relatively to each other. 11