Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Lateral computing wikipedia , lookup
Inverse problem wikipedia , lookup
Knapsack problem wikipedia , lookup
Computational electromagnetics wikipedia , lookup
Natural computing wikipedia , lookup
Computational complexity theory wikipedia , lookup
Perceptual control theory wikipedia , lookup
Travelling salesman problem wikipedia , lookup
Multiple-criteria decision analysis wikipedia , lookup
Multi-objective optimization wikipedia , lookup
Mathematical optimization wikipedia , lookup
Distributed control system wikipedia , lookup
Weber problem wikipedia , lookup
Control system wikipedia , lookup
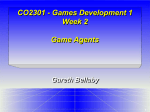
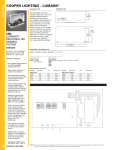
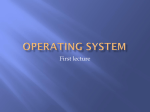
Proceedings of the 13th IFAC Workshop on Time Delay Systems, Istanbul, Turkey, June 22-24, 2016 TA11.1 H2 Optimal Cooperation of Homogeneous Agents Subject to Delyed Information Exchange ? Daria Madjidian Leonid Mirkin Laboratory of Information and Decision Systems, Massachusetts Institute of Technology, Cambridge, MA, 02139. E-mail: [email protected]. Faculty of Mechanical Engineering, Technion—IIT, Haifa 32000, Israel. E-mail: [email protected]. Abstract: We consider a class of large-scale H2 coordination problems where subsystems are coupled through a penalty on their average behavior and the information exchange between agents is subject to a time delay. We derive explicit analytic expressions for the optimal control law and show that it is scalable both in terms of implementation and the computational effort required to obtain it. Specifically, the only centralized information processing required to implement the controller is averaging of local agent information, and the computational effort required to obtain it scales linearly with the number of agents. These results are a highly non-trivial extension to two previously studied special cases, where the information exchange is either delay-free or the coordination constraints are hard. Keywords: Distributed cntrol, low-rank coordination, time-delay systems, H2 optimization. 1. INTRODUCTION same control signal (Brockett, 2010; Wood et al., 2008; Azuma et al., 2013). Control of complex systems, or distributed control, has received significant attention over the last decade due to new technologies, networking and integration trends, efficiency demands, etc. The research within this field is driven by a number of multi-agent applications, where full, unstructured information processing is not possible due to communication and scalability restrictions. Recently, we showed that the diagonal-plus-rank-one control structure also appears as the optimal solution to a class of large scale coordination problems, which arise in the control of wind farms (Madjidian and Mirkin, 2014). More specifically, we considered a group of homogeneous agents, where the objective is to strike a trade-off between local performances of the agents and a coordination requirement, expressed in terms of a desired behavior of an average agent. The coordination requirement may be formulated as both hard and soft constraint in the optimization problem. The former approach requires the constraint to be satisfied at each time instance. The latter approach adds coordination requirements as an additional weighted penalty in the cost function. In both cases we showed that the only global information needed to attain the optimal performance is the knowledge of the state of the average agent. Moreover, the computational effort required to obtain the optimal control law is independent of the number of agents. In a distributed control law, agents only have access to partial information about the overall system. Most work within this field assumes a sparse information structure, where agents only exchange information with a limited subset of other agents. See (Šiljak, 1978; Mesbahi and Egerstedt, 2010; Yüksel and Başar, 2013) and references therein. This type of control structure is often well suited if it reflects the physical interaction pattern of the agents (Bamieh et al., 2002). However, sparsity is not the only way to obtain a scalable control law. One example of a non-sparse, yet scalable, controller is a diagonal-plus-rankone configuration. As opposed to the sparse control structures, which restrict the communication capability of each system to a limited set of neighboring systems, this type of control law reduces information processing by aggregating information from all agents into a single quantity, e.g an average, which is then made available to each of the agents. To the best of our knowledge, the diagonal-plus-rank-one structure first explicitly appeared in (Hovd and Skogestad, 1994), as the solution to a class of optimal control problems for symmetrically interconnected systems. A method to design this type of control laws was proposed by Zečević and Šiljak (2005). There are also number of works on rank-one control. This is sometimes called broadcast or ensemble control, and refers to groups of identical decoupled systems that are controlled by the ? This research was supported by the Bernard M. Gordon Center for Systems Engineering at the Technion. Copyright © 2016 IFAC A potential limitation of the problem formulation of Madjidian and Mirkin (2014) is that it assumes instantaneous information exchange between agents. Initial steps to overcome this issue were taken in (Madjidian et al., 2014), where the effect of delays in the communication between agents was studied for the special case of hard coordination constraints. A key feature of the formulation in (Madjidian et al., 2014) is that, due to the hard coordination constraint, the problem could be reduced to a conventional H2 problem with a uniform delay. It was shown that the optimal controller is then again of the diagonal-plusrank-one form. In this paper we solve the general soft coordination problem with delayed information exchange between agents. This formulation yields a highly non-trivial extension of previously available results. Unlike the hard constraint case in (Madjidian et al., 2014), the unorthodox, off-diagonal, delay pattern of the controller does not reduce to a uniform delay. As a result, the 147 solution is substantially more involved, which is manifested both in required technical tools and in the form of the optimal controller. Our solution procedure uses the parametrization of all delay-free solutions to reduce the problem to a one-block finite-horizon H2 model-matching problem with a diagonal controller. This produces closed-form controller formulae and scalable computations. Specifically, the computational effort required to obtain the optimal control law scales linearly with the number of agents. Moreover, just as in the delay-free case, the only global information required to attain optimal performance is an average of local agent information. Another contribution of this paper is the extension of statefeedback results of (Madjidian and Mirkin, 2014; Madjidian et al., 2014) to a more general setup. Namely, instead of perfect state measurements we consider partial state measurements corrupred by noise. Moreover, measurement equations are allowed to be heterogeneous in this paper, which extends the scope of applicability of the result of Madjidian and Mirkin (2014). Notation The transpose of a matrix M is denoted by M 0 and its spectral radius by .M /. The notation diag.Mi / stands for a block-diagonal matrix with matrices Mi , i D 1; : : : ; on its diagonal. By ei we refer to the i th standard basis of a Euclidean space and by In to the n n identity matrix (we drop the dimension subscript when the context is clear). The notation ˝ is used for the Kronecker product of matrices: 3 2 a11 B a1m B 6 :: 7 ; A ˝ B ´ 4 ::: : : : : 5 ap1 B apm B where aij stands for the .i; j / entry of A. Finally, the truncation operator A B A B A B h e sh ´ C 0 C 0 C eAh 0 and the completion operator A B A B h e sh ´ C 0 C e Ah 0 A B C 0 e sh produce entire transfer functions having the (finite) impulse responses C eAt B 1Œ0;h .t/ and C eA.t h/ B 1Œ0;h .t/, respectively, where 1Œ0;h .t/ D 1 if t 2 Œ0; h and 0 otherwise. 2. PROBLEM FORMULATION 2.1 The setup Consider the problem of coordinating agents subject to timedelay in the information exchange between them. The agents are assumed to have linear time-invariant (LTI) dynamics, described by the following state-space dynamics: xP i .t/ D Axi .t/ C Bwi wi .t/ C Bu ui .t/ (1) yi .t/ D Cyi xi .t/ C Dyi wi wi .t/ where xi .t/ 2 Rn is a state vector, ui .t/ 2 Rm is a control input, wi .t/ 2 Rqi is an exogenous input (disturbance), and yi .t/ 2 Rpi is a measured output. Note that the local dynamics and the effect of the control inputs on them are equal for each agent, whereas the effect of the disturbances and measurement equations may differ. The agents have identical local objectives, ´ w G´w G´u 0 0 ˝ D Gyw Gyu ´ y K u Fig. 1. Aggregate standard H2 problem with coordination penalty which are quantified in terms of the H2 problems associated with the regulated outputs ´i .t/ ´ C´ xi .t/ C D´u ui .t/: (2) These local objectives can be cast as the standard H2 problem for the aggregate generalized plant with block-diagonal components, 2 3 I ˝ A Bw I ˝ Bu G´w .s/ G´u .s/ D 4 I ˝ C´ 0 I ˝ D´u 5 ; (3) Gyw .s/ Gyu .s/ Cy Dyw 0 which connects the aggregate inputs P w and u with the aggregate outputs ´ and y (e.g., w ´ i D1 ei ˝ wi ), where Bw ´ diag.Bwi /, Cy ´ diag.Cyi /, and Dyw ´ diag.Dyi wi /. Coordination among the agents is imposed via another regulated variable, X i ui .t/ (4) ´ .t/ D D u.t/ N ´ D i D1 for some weights i . Combining local and coordination regulated variables, the problem studied in this paper can be cast as 0 H2 the standard problem for the setup in Fig. 1, where ´ 1 . The goal is to internally stabilize the closed loop system T´w .s/ G´w .s/ G´u .s/ D C 0 T .s/ 0 ˝ D K.s/ I Gyu .s/K.s/ 1 Gyw .s/: (5) and minimize its H2 -norm. Here T´w and T reflect local and coordination objectives, respectively. By increasing D , e.g., p by taking D D =.1 /I with " 1, we may enforce the hard constraint uN D 0. We assume that the the information exchange among agents is subject to a delay of h time units. This restriction results in the following constraint on K : 3 2 K11 .s/ e sh K12 .s/ e sh K1 .s/ 6 e sh K21 .s/ K22 .s/ e sh K2 .s/ 7 7 6 (6) K.s/ D 6 7 :: :: :: :: 5 4 : : : : e sh K1 .s/ e sh K2 .s/ K .s/ for causal Kij and h > 0. Remark 1. In principle, a more general form of coordination than (4) can be considered. For example, following the formulation in (Madjidian and Mirkin, 2014), we P may think of ´ based on uN GN yN instead of uN , where yN ´ i i yi and GN .s/ is some system. This modification, however, reduces to (4) via the following shift of the control variables: ui D vi C GN yi . Thus, we can consider the simpler form (4) without loss of generality. O 148 Remark 2. If h D 0, the H2 problem in Fig. 1 is an outputfeedback extension of the state-feedback problem studied in (Madjidian and Mirkin, 2014, ÷IV-A). It is relatively straightforward to use similar arguments as in (Madjidian and Mirkin, 2014) to show that the optimal control law has a diagonal-plusrank-one form, and that it can be obtained by solving three algebraic Riccati equations (ARE) of size n, see Section 3. O Remark 3. If h > 0 and we impose the constraint uN D 0 (corresponds to D D 1), the problem reduces to an outputfeedback version of the problem studied in (Madjidian et al., 2014). As shown there, the combination of the hard constraint with (6) implies that the diagonal elements of K must be delayed as well. As a result, the problem reduces to a singledelay H2 problem, which is well understood. O 2.2 The formal problem statement The formal statement of the optimization problem considered in this paper is then as follows: T´w 2 minimize J ´ (7a) T 2 subject to K of the form (6) (7b) We address (7) under the following assumptions: I F˛ 0 L Fig. 2. Centralized part of the controller in the case of h D 0 whose solution is stabilizing if the matrix A ´ A C Bu F , 0 where F ´ .I C D0 D / 1 .Bu0 X C D´u C´ /, is Hurwitz, and, for every i D 1; : : : ; , AYi C Yi A0 C Bwi Bw0 i .Yi Cy0 i C Bwi Dy0 i wi /.Cyi Yi C Dyi wi Bw0 i / D 0; (8c) whose solution is stabilizing if the matrix ALi ´ A C Li Cyi , where Li ´ .Yi Cy0i C Bwi Dy0 i wi /, is Hurwitz. It is known (Zhou et al., 1995, Ch. 13) that if A 1–6 hold, the stabilizing solutions to (8) exist, are unique, and such that X˛ 0, X 0, and Yi 0 (in fact, it is readily seen that X˛ X ). Theorem 4. Let h D 0. The optimal attainable performance in (7) is then X 2 opt D tr L0i ..1 2i //X˛ C 2i X /Li C tr.C´ Yi C´0 / : K.s/ D Fl .J.s/; Ru 1 Q.s//; kQk22 2 2 opt (9) where Ru ´ .I 0 / ˝ I C .0/ ˝ .I C D0 D /1=2 and 2 3 I ˝ A C .I ˝ Bu /F C LCy L I ˝ Bu 5; J.s/ D 4 F 0 I Cy I 0 A 4 : .Cyi ; A/ is detectable, A j!I Bwi has full row rank 8! 2 R, A 5: Cyi D´i ui A 6 : D´i ui D´0 i ui D I , where F ´ .I and also A 7 : 0 D 1. Assumptions A 1,2,4,5 are standard assumptions necessary for the well-posedness of the uncoordinated local problems. The normalization assumptions in A 3,6,7 are introduced to simplify the exposition and can be relaxed. 3. DELAY-FREE SOLUTION We start with extending the results of (Madjidian and Mirkin, 2014) to the output-feedback setting. Although not a technical challenge, this extension is the starting point of our treatment of the delayed version of the problem. To formulate the solution, we need the following algebraic Riccati equations (AREs): (8a) whose solution is stabilizing if the matrix A˛ ´ A C Bu F˛ , 0 where F˛ ´ .Bu0 X˛ C D´u C´ /, is Hurwitz, .X Bu C C´0 D´u / 0 .I C D0 D / 1 .Bu0 X C D´u C´ / D 0; A F 1 and, for every opt , the set of all -suboptimal controllers is parametrized as for every i D 1; : : : ; , A0 X C X A C C´0 C´ N 1 L1 i D1 A 1 : .A; Bu / is stabilizable, A j!I Bu has full column rank 8! 2 R, A 2: C´ D´u 0 A 3 : D´u D´u D I , A0 X˛ C X˛ A C C´0 C´ 0 .X˛ Bu C C´0 D´u /.Bu0 X˛ C D´u C´ / D 0; (8b) 0 / ˝ F˛ C .0 / ˝ F and L ´ diag.Li /. Proof. Key steps are to show that the solution to the filtering ARE associated with the generalized plant in Fig. 1 is diag.Yi /, which is straightforward, and the solution to the corresponding control ARE is .I 0/ ˝ X˛ C .0/ ˝ X , which follows by coordinate transformations similar to those used in (Madjidian and Mirkin, 2014). The rest follows by (Zhou et al., 1995, Thm. 14.8). The optimal controller of Theorem 4, the one corresponding to Q D 0, can be implemented in the following observer-based form: P i .t/ D Ai .t/ C Bu ui .t/ Li i .t/; (10) ui .t/ D F˛ i .t/ C i .F F˛ /.t/; N where i .t/ P ´ yi .t/ Cyi i .t/ is the i th “innovation” and .t/ N ´ i D1 i i .t/ is the “averaged” observer state. This controller inherits the main feature of the state-feedback controller derived in (Madjidian and Mirkin, 2014). Namely, the information exchange between agents is done via an averaging operation. The only difference is that the actual states are now replaced with their observations. P Note also that N verified the PN equation .t/ D A .t/ N i D1 i Li i .t/. Hence, the output equation in (10) can be rewritten as ui .t/ D F˛ i .t/ i .t/; N where N is generated by the system presented in Fig. 2. This signal will play an important role in the case of h > 0. 149 The following result is required to characterize the local performance under the controller of Theorem 4. Lemma 5. The H2 norm of the closed-loop system from the aggregate exogenous signal w to the regulated variable ´i attainable with the controller of Theorem 4 is ui 2 i kT´i w k22 D i;2opt C k.ei ˝ I /.J1 C J2 Ru 1 Q/k22 ; i;2opt tr.L0i X˛ Li / tr.C´ Yi C´0 / where D C performance of the i th agent and A J1 .s/ J2 .s/ D ˝ .F F˛ / is the optimal local It follows from Lemma 5 that under the optimal controller (Q D 0) we have that tr.j2 Lj0 Xv Lj /; j D1 where Xv 0 is the solution to the Lyapunov equation F˛ /0 .F F˛ / D 0: (11) It is then readily seen that X X kT´i w k22 D tr 2i L0i X´ Li ; 2 kT´ w k22 D opt i D1 where X´ ´ X X˛ A0 X´ i D1 Xv . Because X´ verifies C X´ A C F0 D0 D F D 0 (this can be verified by some algebra), we have X´ 0. 4. ADDING DELAYS We need another set of AREs: A0 Xi C Xi A C C´0 C´ .Xi Bu C C´0 D´u / 0 .I C 2i D0 D / 1 .Bu0 Xi C D´u C´ / D 0; (12) whose solution is stabilizing if the matrix Ai ´ A C Bu Fi , 0 C´ /, is Hurwitz. where Fi ´ .I C 2i D0 D / 1 .Bu0 Xi C D´u It is readily seen that X˛ Xi X . It can also be verified that Zi ´ Xi .1 2i /X˛ N A F I F˛ 0 e 1 LQ 1 1 LQ sh Fig. 4. Centralized part of the controller in the case of h > 0 is the generator of all suboptimal controllers for the uncoordinated version of the problem (the one with D D 0). The result then follows by applying the arguments of (Zhou et al., 1995, Sec. 14.6). A0 Xv C Xv A C .F LQ i Bu A˛ Fi F˛ 0 I Fig. 3. The optimal controller for the i th agent I ˝ A˛ C LCy L I ˝ Bu 5 I ˝ F˛ 0 I Cy I 0 X i N .0 ˝ I /L 0 ˝ Bu : 0 I 3 kT´i w k22 D i;2opt C 2i sh e where J˛ .s/ D 4 i ˘i .s/ Proof. Based of the readily verifiable fact that the controller parametrization of Theorem 4 can be equivalently expressed as K.s/ D Fl J˛ .s/; J1 .s/ C J2 .s/Ru 1 Q.s/ ; 2 yi 3 Li Bu 0 I 5 I 0 Ai C Li Cyi 4 Fi Cyi 2i X 0 (Zi ! 0 as both i # 0 and i " 1). We also need the matrix functions Z t 0 eAi Bu .I C 2i D0 D / 1 Bu0 eAi d: Wi .t/ ´ 0 The main result of this paper, whose proof is postponed to Section 5, is then formulated as follows: Theorem 6. For every h 0, .Wi .h/Zi / < 1 for all i D 1; : : : ; , the optimal attainable performance in (7) is 2 2 h; opt D opt C X tr L0i Zi 0 eAi h Zi .I Wi .h/Zi / 1 Ai h e i D1 Li and the optimal controller is as depicted in Fig. 3, where Qi Zi L A0i sh e ; ˘i .s/ ´ h .I C 2i D0 D / 1 Bu0 0 Q i ´ .I L Wi .h/Zi / 1 eAi h Li , and N is generated by the system presented P in Fig. 4 from the weighted average of local “innovations” iD1 i LQ i i . The local part of the controller of Theorem 6 comprises two finite-dimensional systems, a delay, and a distributed-delay element ˘i . The latter is an infinite-dimensional system, which can nevertheless be efficiently implemented, see (Troeng and Mirkin, 2013) and the references therein. The centralized part presented in Fig. 4 is based on the weighted average of the local innovations i . This averaging is an extension of those required in the state-feedback cases studied in (Madjidian and Mirkin, 2014; Madjidian et al., 2014). The presence of the delay in Fig. 4 renders the resulting controller compatible with (6), as expected. Remark 7. Because the matrices Ai are Hurwitz, the increase of the delay h reduces the gains LQ i . As a result, both i and N vanish as h ! 1 and we end up with the diagonal controllers Ai C Li Cyi L1 : Fi 0 It can be shown that these are the optimal controllers for (7a) under the constraint that K is block-diagonal, i.e., when no coordination between the agents is permitted. O Remark 8. As mentioned in Section 2, the choice D D p =.1 /I for " 1 enforces the hard constraint uN D 0. This formulation, which was studied in (Madjidian et al., 2014) and is well posed only if A is Hurwitz, results in Xi D X , Fi D F D 0, and ˘i D 0. The latter simplifies the implementation of the optimal controller. O Remark 9. The i th controller of Theorem 6 can be alternatively presented in the form depicted in Fig. 5, where 150 ui 2 i A˛ C Li Cyi 4 F˛ Cyi ˘0i .s/ 3 Li Bu 0 I 5 I 0 3 I ˝ A C .I ˝ Bu /FQ C LCy L I ˝ Bu 5 JQ .s/ ´ 4 FQ 0 I Cy I 0 2 yi i for some block-diagonal FQ D diag.FQi / such that all A C Bu FQi are Hurwitz. The choice of the same observer gain L as in J.s/ is motivated by the fact that in this case Q Q.s/ D T1 .s/ C T2 .s/Q.s/; i N Fig. 5. The optimal controller for the i th agent (alternative form) 2 3 Qi L Ai Bu Ri 1 Bu0 Q i 5 e sh ; ˘0i .s/ ´ h 4 Zi L 0 A0i 1 0 F˛ Fi Ri Bu 0 ˚ Ri ´ I C 2i D0 D , and the centralized term N is generated by the system presented in Fig. 4 (note the gain F˛ instead of Fi in the main generator). This can be seen using the arguments in the beginning of the proof of Lemma 5 and for the optimal Q given by Lemma 11, from which J1 .s/ C J2 .s/Ru 1 Q.s/ D diag ˘0i .s/ Q A .0 ˝ I /L . ˝ I / e sh : F F˛ 0 The latter expression can also be used to calculate the local costs via Lemma 5. O 5. PROOF OF THEOREM 6 (OUTLINE) Our starting point in the proof of the main result is the observation that the set of controllers described by (6) is a subset of unconstrained causal controllers addressed in Theorem 4. As a result, for any h > 0, the optimal solution of (7) is covered by parametrization (9). We can then solve (7) by finding the minimal-norm Q for which controller (9) is of the form (6). To this end, note that the mapping Q 7! K defined by (9) is invertible and the inverse mapping is described by the LFT (Zhou Q K/, et al., 1995, Lemmas 10.4 (c) and 10.3 (i)) Q D Ru Fl .G; where 2 3 I ˝ A L I ˝ Bu 1 Q 5; G.s/ ´ P12 J .s/P12 D 4 F 0 I Cy I 0 and P12 ´ I0 I0 . Therefore, (7) is equivalent to the problem of minimizing the H2 norm of Q by a controller of the form (6). This is a constrained standard H2 problem for the generalized plant GQ , similar to (7). A big advantage of this transformation is that the problem associated with GQ is a one-block problem (this fact was first explicitly exploited in (Meinsma et al., 2002)). As will be demonstrated below, this property plays an important role in handling the off-diagonal delays in K transparently. Now, the .2; 2/ part of GQ , which actually equals Gyu , is blockdiagonal. It is then readily seen that constraint (6) is quadratically invariant (Rotkowitz and Lall, 2006) with respect to this plant. This, in turn, implies that the Youla parametrization of all stabilizing controllers preserves structure (6) in its free parameter, provided the parametrization is also based on blockdiagonal elements. We consider the set of all stabilizing K of form (6): Q K.s/ D Fl JQ .s/; Q.s/ ; Q where Q.s/ is constrained as in (6) and where I ˝ A C .I ˝ Bu /FQ L I ˝ Bu T1 .s/ T2 .s/ ´ Ru .FQ F / 0 Ru and Ru and F are defined in Theorem 4. Our problem is now to find QQ that minimizes kQk2 . Let us now split Q Q.s/ D QQ d .s/ C e sh QQ h .s/ for some block-diagonal FIR, with support in Œ0; h, QQ d D diag.QQ d;i / and a causal and stable, but otherwise unconstrained QQ h . The following result can then be formulated: Lemma 10. Denote by qQd;i .t/ the impulse response of QQ d;i and Q D diag.L Q i /, where L Z h Q Q i ´ e.ACBu FQi /h Li e.ACBu Fi /.h / Bu qQd;i . /d: L 0 Then ˚ Q.s/ D h T1 .s/ C T2 .s/QQ d .s/ C e sh TQ1 .s/ C T2 .s/QQ h .s/ ; where TQ1 .s/ ´ I ˝ A C .I ˝ Bu /FQ Ru .FQ F / (13) Q L : 0 Proof. Omitted because of space limitations. Lemma 10 says that Q can always be split into two parts that are orthogonal in H2 (they have non-overlapping impulse responses). Moreover, the second term in the right-hand side of (13) can be made zero for every QQ d (this is the very reason for reducing (7) to the one-block problem at the beginning of this section). Indeed, it is readily seen that T2 is square and stably invertible, so the choice Q I ˝ A C .I ˝ Bu /F L QQ h .s/ D T2 1 TQ1 .s/ D (14) FQ F 0 is admissible and optimal. Because the choice of QQ h does not affect the first term in th right-hand side of (13), the problem of minimizing kQk2 reduces to the problem of minimizing kQ0 k2 by a block-diagonal QQ d , where ˚ Q0 .s/ ´ h T1 .s/ C T2 .s/QQ d .s/ (as a matter of fact, the optimal Q is then FIR). The latter problem can be split into independent problems by noting that the i th block column of Q0 depends only on QQ d;i . Indeed, because QQ d .ei ˝ I / D .ei ˝ I /QQ d;i , ˚ Q0 .s/.ei ˝ I / D h T1i .s/ C T2i .s/QQ d;i .s/ ; where T1i ´ T1 .ei ˝ I / and T2i ´ T2 .ei ˝ I / with A C Bu FQi Li Bu T1i .s/ T2i .s/ D Ci C Di FQi 0 Di (15) 151 with Ci ´ Ru F .ei ˝ I / and Di ´ Ru .ei ˝ I /. Thus, we end up with optimization problems ˚ minimize h T1i .s/ C T2i .s/QQ d;i .s/ 2 ; (16) which are finite-horizon H2 model-matching problems. If we then choose FQi D Fi , where Fi is the gain associated with (12), T2iÏ .s/T2i .s/ D Di0 Di D I C 2i D0 D (Zhou et al., 1995, Thm. 13.32) and the solution to (16) is simplified. This solution is given by the following lemma: Lemma 11. Let FQi D Fi , then the optimal QQ d;i D ˘i defined in Theorem 6, the i th column of the resulting Q is 2 3 LQ i Ai Bu Ri 1 Bu0 Q i 5 e sh ; Qi .s/ D Ru h 4 0 Zi L A0i 1 0 Mi ei ˝ .Ri Bu / 0 ˚ where Ri ´ I C 2i D0 D and Mi ´ F .ei ˝ I / H2 norm of this optimal Qi is 0 kQi k22 D tr L0i Zi eAi h Zi .I Wi .h/Zi / ei ˝ Fi , the 1 Ai h e Li ; which is well-defined because .Wi .h/Zi / < 1, and LQ i defined in Lemma 10 coincides with that defined in Theorem 6. Proof. Omitted because of space limitations. Thus, combining the optimal QQ d;i with QQ h from (14) and taking into account that I ˝ A C .I ˝ Bu /F D .I 0 / ˝ A˛ C .0 / ˝ A ; the optimal I ˝ A C .I ˝ Bu /F LQ Q e sh Q.s/ D diag.˘i .s// C FQ F 0 LQ i A˛ sh D diag ˘i .s/ C e Fi F˛ 0 Q .I 0 / ˝ A˛ C .0 / ˝ A L C e sh .0 / ˝ .F F˛ / 0 A˛ LQ i e sh D diag ˘i .s/ C diag.i I / Fi F˛ 0 3 2 A˛ Bu 6 F1 F˛ I 7 Q A .0 ˝ I /L 7 6 e sh 6 :: :: 7 0 4 : : 5 F F˛ F F˛ Madjidian, D. and Mirkin, L. (2014). Distributed control with low-rank coordination. IEEE Trans. Control of Network Systems, 1(1), 53–63. Madjidian, D., Mirkin, L., and Rantzer, A. (2014). Optimal coordination of homogeneous agents subject to delayed information exchange. In Proc. 53rd IEEE Conf. Decision and Control, 5107–5112. Los Angeles, CA. Meinsma, G., Mirkin, L., and Zhong, Q.C. (2002). Control of systems with I/O delay via reduction to a one-block problem. IEEE Trans. Automat. Control, 47(11), 1890–1895. Mesbahi, M. and Egerstedt, M. (2010). Graph Theoretic Methods in Multiagent Networks. Princeton University Press, Princeton. Rotkowitz, M. and Lall, S. (2006). A characterization of convex problems in decentralized control. IEEE Trans. Automat. Control, 51(2), 274–286. Šiljak, D.D. (1978). Large-Scale Dynamic Systems: Stability and Structure. North-Holland, NY. Troeng, O. and Mirkin, L. (2013). Toward a more efficient implementation of distributed-delay elements. In Proc. 52nd IEEE Conf. Decision and Control, 294–299. Florence, Italy. Wood, L.B., Das, A., and Asada, H.H. (2008). Broadcast feedback control of cell populations using stochastic Lyapunov functions with application to angiogenesis regulation. In Proc. 2008 American Control Conf., 2105–2111. Seattle, WA. Yüksel, S. and Başar, T. (2013). Stochastic Networked Control Systems: Stabilization and Optimization under Information Constraints. Birkhäuser, Basel. Zečević, A.I. and Šiljak, D.D. (2005). Global low-rank enhancement of decentralized control for large-scale systems. IEEE Trans. Automat. Control, 50(5), 740–744. Zhou, K., Doyle, J.C., and Glover, K. (1995). Robust and Optimal Control. Prentice-Hall, Englewood Cliffs, NJ. I which can be implemented as shown in Figs. 3 and 4. To complete the proof of Theorem 6 we only need to sum up the norms kQi k22 , which yields the increment of the optimal cost dues to the presence of delays. REFERENCES Azuma, S., Yoshimura, R., and Sugie, T. (2013). Broadcast control of multi-agent systems. Automatica, 49(8), 2307– 2316. Bamieh, B., Paganini, F., and Dahleh, M.A. (2002). Distributed control of spatially invariant systems. IEEE Trans. Automat. Control, 47(7), 1091–1107. Brockett, R.W. (2010). On the control of a flock by a leader. Proc. Steklov Inst. Math., 268, 49–57. Hovd, M. and Skogestad, S. (1994). Control of symmetrically interconnected plants. Automatica, 30(6), 957–973. 152