Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Fatigue (material) wikipedia , lookup
Nanochemistry wikipedia , lookup
Crystal structure wikipedia , lookup
Electricity wikipedia , lookup
Metamaterial wikipedia , lookup
Spinodal decomposition wikipedia , lookup
Giant magnetoresistance wikipedia , lookup
Shape-memory alloy wikipedia , lookup
Strengthening mechanisms of materials wikipedia , lookup
Energy applications of nanotechnology wikipedia , lookup
Semiconductor wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Colloidal crystal wikipedia , lookup
Paleostress inversion wikipedia , lookup
Deformation (mechanics) wikipedia , lookup
Hooke's law wikipedia , lookup
Work hardening wikipedia , lookup
Magnetic skyrmion wikipedia , lookup
Condensed matter physics wikipedia , lookup
Energy harvesting wikipedia , lookup
Nanogenerator wikipedia , lookup
History of metamaterials wikipedia , lookup
Superconductivity wikipedia , lookup
Viscoelasticity wikipedia , lookup
Piezoelectricity wikipedia , lookup
159
Active Materia
6. Active Materials
Guruswami Ravichandran
This chapter provides a brief overview of the
mechanics of active materials, particularly those
which respond to electro/magnetic/mechanical
loading. The relative competition between mechanical and electro/magnetic loading, leading
to interesting actuation mechanisms, has been
highlighted. Key references provided within this
chapter should be referred to for further details on
the theoretical development and their application
to experiments.
6.1
Background ......................................... 159
6.1.1 Mechanisms
of Active Materials........................ 160
6.1.2 Mechanics in the Analysis, Design,
and Testing of Active Devices ......... 160
6.2
Piezoelectrics ....................................... 161
6.3 Ferroelectrics .......................................
6.3.1 Electrostriction.............................
6.3.2 Theory ........................................
6.3.3 Domain Patterns ..........................
6.3.4 Ceramics .....................................
162
162
163
163
165
6.4 Ferromagnets....................................... 166
6.4.1 Theory ........................................ 166
6.4.2 Magnetostriction .......................... 167
References .................................................. 167
6.1 Background
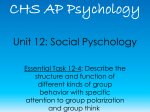
shown in Fig. 6.1 [6.1]. Active materials are widely used
as sensors and actuators, including vibration damping,
Work per volume (J/m3)
108
Experimental
Theoretical
Shape memory alloy
107 Solid–liquid
106
Fatigued SMA
Thermopneumatic
Ferroelectric
EM
ES
Thermal
expansion
5
10
PZT
Electromagnetic (EM)
104 Muscle
Electrostatic (ES)
EM
3
10
102 0
10
ES
Microbubble
101
102
103
ZnO
104
105
106
107
Cycling frequency (Hz)
Fig. 6.1 Characteristics of common actuator systems (after
Krulevitch et al. [6.1])
Part A 6
Active materials in the context of mechanical applications are those that respond by changing shape to
external stimuli such as electro/magnetic-mechanical
loading, which is in general reversible in nature. The
change in shape results in mechanical sensing and actuation that can be exploited in a variety of ways for
practical applications. The mechanics of actuation depends on a wide range of mechanisms, which generally
depend on some form of phase transition or motion
of phase boundaries under external stimuli. There are
also active materials which respond to thermomechanical loading such as shape-memory alloys, which are
not discussed here. This chapter is confined to materials which respond to electro/magnetic-mechanical
loading such as piezoelectric, ferroelectric, and ferromagnetic solids. A common feature of these materials
is that cyclic actuation takes place, often accompanied
by hysteresis.
The common figures of merit used to characterize actuator performance are the work/unit volume and
the cycling frequency. The characteristics of common
actuator materials/systems in this parameter space are
160
Part A
Solid Mechanics Topics
micro/nanopositioning, ultrasonics, sonar, fuel injection, robotics, adaptive optics, active deformable structures, and micro-electromechanical systems (MEMS)
devices such as micropumps and surgical tools.
a)
ε
E
E
6.1.1 Mechanisms of Active Materials
The mechanics of actuation for most solid-state active
materials depend on one or a combination of the following effects, illustrated in Fig. 6.2a–c.
•
•
•
Piezoelectric effect (Fig. 6.2a) is a linear phenomenon in which the mechanical displacement
(strain ε) is proportional to the applied field or voltage (E) and the sign of the displacement depends on
the sign of the applied field.
Electrostriction (Fig. 6.2b) is generally observed in
dielectrics and most prominent in single-crystal ferroelectrics and ferroelectric polymers, where the
displacement (strain ε) or actuation is a function
of the square of the applied voltage (E) and hence
the displacement is independent of the sign of the
applied voltage.
Magnetostriction (Fig. 6.2c) is similar to electrostriction except that the applied field is magnetic
in nature, which is most common in ferromagnetic
solids. The displacement (strain ε) in single-crystal
magnetostrictive material is proportional to the
square of the magnetic field (H).
b)
ε
±E
E
c)
ε
±H
H
Fig. 6.2 (a) Piezoelectricity described by the converse
piezoelectric effect is a linear relationship between strain
(ε) and applied electric field (E). (b) Electrostriction
is a quadratic relationship between strain (ε) and electric field (E), or more generally, an electric-field-induced
deformation that is independent of field polarity. (c) Magnetostriction is a quadratic relationship between strain (ε)
and the applied magnetic field (H), or more generally,
a magnetic-field-induced deformation that is independent
of field polarity
Part A 6.1
trasonics, linear and rotary micropositioning devices,
and sonar. Potential applications include microrobotics,
active surgical tools, adaptive optics, and miniaturized
actuators. The problems associated with active materials are multi-physics in nature and involve solving
coupled boundary value problems.
6.1.2 Mechanics in the Analysis, Design,
The formulation of boundary value problems in
and Testing of Active Devices
solid mechanics and the solution techniques have been
discussed in Chap. 1 and will not be revisited here
The quest for the design and analysis of efficient except to restate some of the governing equations inand compact devices for actuation in the form of volving linearized theory and the appropriate boundary
micro/nano-electromechanical systems (MEMS/NEMS) conditions. The active materials of interest may undergo
places considerable demands on the choice of mater- large deformations at the microstructural scale due
ials, processing, and mechanics of actuation. Most of to various phase transformations (reorientation of unit
the current applications of actuators except for a few cells); the macroscopic deformations generally do not
specialized applications use piezoelectric materials. exceed a few percentage (ranging from 0.2% for piezoA detailed understanding of the various mechanisms electric, 1–6.5% for single-crystal ferroelectrics, and
and mechanics of actuation in active materials will pave ≈ 0.1% for single-crystal magnetostrictive solids). Linthe way for the design of new actuation devices, ad- earized theory of elasticity is used throughout, which
vancing further application of this promising class of suffices for most experimental design and applications.
materials and other emerging multiferroic materials. Appropriate references for provided for readers who
The current applications of these materials include ul- are interested in using rigorous large-strain (finiteThough the electrostrictive and magentostrictive effects
are most evident in single-crystal materials, they also
play an important role in polycrystalline solids, where
these effects are influenced by the texture (orientation)
of the various crystals in the solid.
Active Materials
deformation) formulations. For the basic notions of
materials science such as the unit cell, crystallography,
and texture, the reader is referred to Chap. 2.
The parameters of interest in solid mechanics for the
active materials (occupying a volume V , with surface
denoted by S) include the Cauchy stress tensor (σ ), the
small-strain tensor ε(εij = 12 (u i, j + u j,i )), and the strain
energy density W. The materials are assumed to be
linearly elastic solids characterized by the fourth-order
elastic moduli tensor C. The Cauchy stress is related to
the strain through the elastic moduli σij = Cijkl εkl . The
mechanical equilibrium of the stress state is governed
by the following field equation
σij, j + ρ0 bi = 0 in V .
(6.1)
The boundary conditions are characterized by the prescribed traction (force) vector (t 0 ) on S2 and/or the
displacement vector (u0 ) on S1 . The traction on a surface is related to the stress through the Cauchy relation,
t i = σij n j , where n is the unit outward normal to the
surface. ρ0 is the mass density and b is the body force
per unit mass.
6.2 Piezoelectrics
161
The parameters of interest in the electromechanics
of solids include the polarization ( p) and the electrostatic potential (φ). The governing equation for the
electrostatic potential is expressed by Gauss’s equation
∇ · (−ε0 ∇φ + p) = 0 in V ,
(6.2)
where ε0 is the permittivity. The boundary conditions on
the electrostrictive solid are characterized by the conductors in the form of the electric field on
the electrodes
(∇φ = 0 on C1 ), including the ground ( S ∂φ
∂n dS = 0 and
φ = 0 on C2 ).
The parameters of interest in the magnetomechanics
of solids include the magnetization (m) and the induced
magnetic field (H). The governing equations are given
by
∇ × H = 0,
∇ · (H + 4πm) = 0 in V ,
(6.3)
An important aspect of electro(magnetic) active materials is that the electro(magnetic) field permeates the
space (R3 ) surrounding the body that is polarized (magnetized).
6.2 Piezoelectrics
Di = dijk σ jk ,
(6.4)
where σ is the stress tensor and D is the electric displacement vector, which is related to the polarization p
according to
Di = pi + ε0 E i ,
(6.5)
where E is the electric field vector [6.3]. For materials
with large spontaneous polarizations, such as ferroelectrics, the electric displacement is approximately
equal to the polarization (D ≈ p). For actuators, a more
common representation of piezoelectricity is the converse piezoelectric effect. This is a linear relationship
between strain and electric field, as shown in Fig. 6.1a
and in the following equation at constant stress,
eij = dijk E k ,
(6.6)
where e is the strain tensor and d is the same as
in (6.4). These relationships are often expressed in matrix notation as
Di = dij σ j ,
e j = dij E i ,
σ j = sij E i ,
(6.7)
(6.8)
(6.9)
where s is the matrix of piezoelectric stress constants [6.2, 3]. The parameters commonly used to
characterize the piezoelectric effect are the constants d3i
(in particular, d33 ), which are measures of the coupling
between the applied voltage and the resultant strain in
the specimen.
Part A 6.2
Piezoelectricity is a property of ferroelectric materials, as well as many non-ferroelectric crystals,
such as quartz, whose crystal structure satisfy certain symmetry criteria [6.2]. It also exists in certain
ceramic materials that either have a suitable texture or exhibit a net spontaneous polarization. The
most common piezoelectric materials which are widely
used in applications include lead zirconate titanate
(PZT, Pb(Zr,Ti)O3 ) and lead lanthanum zirconate titanate (PLZT, Pb(La,Zr,Ti)O3 ). Many polymers such
as polyvinylidene fluoride (PVDF) and its copolymers
with trifluoroethylene (TrFE) and tetrafluoroethylene
(TFE) also exhibit the piezoelectric effect. The typical
strain achievable in the common piezoelectric solids is
in the range of 0.1–0.2%. The direct piezoelectric effect is defined as a linear relationship between stress and
electric displacement or charge per unit area,
162
Part A
Solid Mechanics Topics
6.3 Ferroelectrics
The term ferroelectric relates not to a relationship of the
material to the element iron, but simply a similarity of
the properties to those of ferromagnets. Ferroelectrics
exhibit a spontaneous, reversible electrical polarization and an associated hysteresis behavior between
the polarization and electric field [6.4–6]. Much of
the terminology associated with ferroelectrics is borrowed from ferromagnets; for instance, the transition
temperature below which the material exhibits ferroelectric behavior is referred to as the Curie temperature.
The ferroelectric phenomenon was first discovered in
Rochelle salt (NaKC4 H4 O6 · 4H2 O). Other common examples of ferroelectric materials include barium titanate
(BaTiO3 ), lead titanate (PbTiO3 ), and lithium niobate
(LiNbO3 ). Materials of the perovskite structure (ABO3 )
appear to have the largest electrostriction and spontaneous polarization.
6.3.1 Electrostriction
Electrostriction, in its most general sense, means simply
electric-field-induced deformation. However, the term
is most often used to refer to an electric-field-induced
deformation that is proportional to the square of the
electric field, as illustrated in Fig. 6.1b,
εij = Mijkl E k El .
(6.10)
Part A 6.3
This effect does not require a net spontaneous
polarization and, in fact, occurs for all dielectric materials [6.5]. The effect is quite pronounced in some ferroelectric ceramics, such as Pb(Mgx Nb1−x )O3 (PMN)
and (1 − x)[Pb(Mg1/3 Nb2/3 )O3 ] − xPbTiO3 (PMN-PT),
which generate strains much larger than those of piezoelectric PZT. The term electrostriction will be defined
in a more general sense as electric-field-induced deformation that is independent of electric field polarity.
As mentioned earlier, piezoelectricity exists in polycrystalline ceramics which exhibit a net spontaneous
polarization. For a ferroelectric ceramic, while each
grain may be microscopically polarized, the overall
material will not be, due to the random orientation
of the grains [6.2, 7]. For this reason, the ceramic
must be poled under a strong electric field, often
at elevated temperature, in order to generate the net
spontaneous polarization. The ceramic is exposed to
a strong electric field, generating an average polarization. The most interesting property of a ferroelectric
solid is that it can be depolarized by an electric
field and/or stress. It is this property which can be
exploited effectively in achieving large electrostriction [6.6].
Poling involves the reorientation of domains within
the grains. In the case of PZT it may also involve
polarization rotations due to phase changes. PZT is
a solid solution of lead zirconate and lead titanate
that is often formulated near the boundary between
the rhombohedral and tetragonal phases (the so-called
morphotropic phase boundary). For these materials,
additional polarization states are available as it can
choose between any of the 100 polarized states of
the tetragonal phase, the 111 polarized states of the
rhombohedral phase, or the 11k polarized states of
the monoclinic phase. The final polarization of each
grain, however, is constrained by the mechanical and
electrical boundary conditions presented by the adjacent
grains.
A typical polarization–electric field hysteresis curve
for a ferroelectric material is shown in Fig. 6.3. The
spontaneous polarization, P s , is defined by the extrapolation of the linear region at saturation back to the
polarization axis. The remaining polarization when the
electric field returns to zero is known as the remnant
polarization P r . Finally, the electric field at which the
polarization returns to zero is known as the coercive
field E c [6.8].
Polarization
Ps
Pr
Ec
Electric field
Fig. 6.3 Polarization–electric field hysteresis for ferro-
electric materials. The spontaneous polarization (Ps ) is
defined by the line extrapolated from the saturated linear
region to the polarization axis. The remnant polarization
(Pr ) is the polarization remaining at zero electric field.
The coercive field (E c ) is the field required to reduce the
polarization to zero
Active Materials
6.3.2 Theory
163
W
Based on the concepts for ferroelectricity postulated
by Ginzburg and Landau, Devonshire developed a theory in which he treated strain and polarization as
order parameters or field variables, which is collectively
known as the Devonshire–Ginzburg–Landau (DGL)
model [6.2, 9]. This theory was enormously successful in organizing vast amounts of data and providing
the basis for the basic studies of ferroelectricity. The
adaptation of this theory following Shu and Bhattacharya [6.10] is the most amenable in the context of
mechanics and is described below.
Consider a ferroelectric crystal V at a fixed temperature subject to an applied traction t 0 on part of its
boundary S2 and an external applied electric field E 0 .
The displacement u and polarization p of the ferroelectric are those that minimize the potential energy,
1
∇ p · A∇ p + W(x, ε, p) − E0 · p dx
Φ( p, u) =
2
V
ε0
− t0 · u dS +
(6.11)
|∇φ|2 dx ,
2
S2
6.3 Ferroelectrics
R3
W(θ, ε, p) = χij pi p j + ωijk pi p j pk + ξijkl pi p j pk pl
+ ψijklm pi p j pk pl pm
+ ζijklmn pi p j pk pl pm pn
+ Cijkl εij εkl + aijk εij pk
+ qijkl εij pk pl + · · · ,
(6.12)
where χij is the reciprocal dielectric susceptibility of
the unpolarized crystal, Cijkl is the elastic stiffness tensor, aijk is the piezoelectric constant tensor, qijkl is the
electrostrictive constant tensor, and the coefficients are
functions of temperature [6.8].
Fig. 6.4 The multiwell structure of the energy of a ferro-
electric solid with a tetragonal crystal structure as in the
case of common perovskite crystals
The third and fourth terms in (6.11) are the potentials associated with the applied electric field and
mechanical load, respectively. The final term is the
electrostatic field energy that is generated by the polarization distribution. For any polarization distribution,
the electrostatic potential φ is determined by solving Gauss’s equation (6.2) in all space, subject to
appropriate boundary conditions, especially those on
conductors. Thus, this last term is nonlocal.
Ferroelectric crystals can be spontaneously polarized and strained in one of K crystallographically
equivalent variants below their Curie temperature. Thus,
if ε(i) , p(i) are the spontaneous strain and polarization of
the i-th variant (i = 1, . . . , K ), then the stored energy
W is minimum (zero without loss of generality) on the
K [(ε(i) , p(i) )] and grows away from it as shown
Z = ∪i=1
in the bottom right of Fig. 6.4.
6.3.3 Domain Patterns
A region of constant polarization is known as a ferroelectric domain. The orientation of polarization and
strain in ferroelectric crystals is determined by the
possible variants of the underlying crystal structure.
For example Fig. 6.5a shows the six possible variants
that can form by the phase transformation of a perovskite (ABO3 ) crystal from the high-temperature cubic
phase to the tetragonal phase when cooled below the
Curie temperature. Domains are separated by 90◦ or
180◦ domain boundaries (the angle denotes the orientation between the polarization vectors in adjacent
domains, Fig. 6.5b), which can be nucleated or moved
by electric field or stress (the ferroelastic effect). Domain patterns are commonly visualized using polarized
light microscopy and are shown in Fig. 6.5c for BaTiO3 .
The process of changing the polarization direction of
a domain by nucleation and growth or domain wall
motion is known as domain switching. Electric field
can induce both 90◦ or 180◦ switching, while stress
Part A 6.3
where A is a positive-definite matrix so that the first
term above penalizes sharp changes in the polarization
and may be regarded as the energetic cost of forming
domain walls. The second term W is the stored energy
density (the Landau energy density), which depends on
the state variables or order parameters, the strain ε, and
the polarization p, and also explicitly on the position
x in polycrystals and heterogeneous media; W encodes
the crystallographic and texture information, and may in
principle be obtained from first-principles calculations
based on quantum mechanics. It is traditional to take W
to be a polynomial but one is not limited to this choice;
for example, the energy density function W is assumed
to be of the form,
ε, p
164
Part A
Solid Mechanics Topics
can induce only 90◦ switching [6.11]. The domain wall
structures in the mechanical and electrical domain have
recently been experimentally measured using scanning
probe microscopy [6.12], which is typically in the range
of tens of nanometers.
In light of the multiwell structure of W, minimization of the potential energy in (6.11) leads to domain
patterns or regions of almost constant strain and polarization close to the spontaneous values separated by
domain walls. The width of the domain walls is proportional to the square root of the smallest eigenvalue
of A. If this is small compared to the size of the crystal,
as is typical, then the domain wall energy has a negligible effect on the macroscopic behavior and may be
dropped [6.10]. This leads to an ill-posed problem as
the minimizers may develop oscillations at a very fine
scale (Fig. 6.5b), however there has been significant recent progress in studying such problems in recent years,
motivated by active materials.
a)
The minimizers of (6.11) for zero applied load and
field are characterized by strain and polarization fields
that take their values in Z. So one expects the solutions to be piecewise constant (domains) separated by
jumps (domain walls). However the walls cannot be
arbitrary. Instead, an energy-minimizing domain wall
between variants i and j, i. e., an interface separating regions of strain and polarization (ε(i) , p(i) ) and
(ε( j) , p( j) ) as shown in Fig. 6.5d, must satisfy two compatibility conditions [6.10],
1
ε( j) − ε(i) = (a ⊗ n + n ⊗ a) ,
2
(6.13)
( p( j) − p(i) ) · n = 0 ,
where n is the normal to the interface. The first is the
mechanical compatibility condition, which assures the
mechanical integrity of the interface, and the second
is the electrical compatibility conditions, which assures
that the interface is uncharged and thus that energy minimizing. At first glance it appears impossible to solve
these equations simultaneously: the first equation has at
most two solutions for the vectors a and n, and there is
no reason that these values of n should satisfy the second. It turns out however, that if the variants are related
by two-fold symmetry, i. e.,
ε( j) = Rε(k) RT ,
180◦
b)
90° boundary
Part A 6.3
180° boundary
c)
d)
n
(ε(2), p (2))
(ε(1), p (1))
100 μm
Fig. 6.5 (a) Variants of cubic-to-tetragonal phase transformation, the arrows indicate the direction of polarization.
(b) Schematic of 90◦ and 180◦ domains in a ferroelectric
crystal. (c) Polarized-light micrograph of the domain pattern in barium titanate. (d) Schematic of a domain wall in
a ferroelectric crystal
ε( j) = Rp(k) ,
(6.14)
for some
rotation R, then it is indeed possible to
solve the two equations (6.14) simultaneously [6.10]. It
follows that the only domain walls in a 001c polarized
tetragonal phase are 180◦ and 90◦ domain walls, and
that the 90◦ domain walls have a structure similar to
that of compound twins with a rational {110}c interface
and a rational 110c shear direction. The only possible domain walls in the 110c polarized orthorhombic
phase are 180◦ domain walls, 90◦ domain walls having
a structure like that of compound twins with a rational
{100}c interface, 120◦ domain walls having a structure
like that of type I twins with a rational {110}c interface, and 60◦ domain walls having a structure like that
of type II twins with an irrational normal. The only
possible domain walls in the 111c polarized rhombohedral phase are the 180◦ domain walls, and the 70◦ or
109◦ domain walls with a structure similar to that of
compound twins. One can also use these ideas to study
more-complex patterns involving multiple layers, layers
within layers, and crossing layers.
The potential energy (6.11) also allows one to study
how applied boundary conditions affect the microstructure. The nonlocal electrostatic term is particularly
interesting. For example, an isolated ferroelectric that
Active Materials
is homogeneously polarized generates an electrostatic
field around it, and its energetic cost forces the ferroelectric to either become frustrated (form many domains
at a small scale) or form closure domains or surface layers. In contrast, ferroelectrics shielded by electrodes can
form large domains. Hard (high compliance, i. e., stiff)
mechanical loading can force the formation of fine domain patterns [6.10], while soft (low compliance, dead
loading being the most ideal example) loading leads
to large domains. Therefore any strategy for actuation
through domain switching must use electrodes to suitably shield the ferroelectric and soft loading in such
a manner to create uniform electric and mechanical
fields.
6.3 Ferroelectrics
165
by forming a (compatible) microstructure. However,
when each pair of variants satisfy the compatibility conditions (6.13), the results of DeSimone and James [6.15]
can be adopted to show that Z S equals the set of all
possible averages of the spontaneous polarizations and
strains of the variants
n
S
λi ε(i) ,
Z = (ε, p) : ε∗ =
i=1
p∗ =
n
λi (2 f i − 1) p(i) , λi ≥ 0 ,
i=1
n
λi = 1, 0 ≤ f i ≤ 1 .
(6.15)
i=1
6.3.4 Ceramics
Z P ⊇ Z T = ∩ Z S (x) =
x∈Ω
{(ε, p)|(R(x) ε RT (x), R(x) p) ∈ Z S (x), ∀x ∈ Ω} .
(6.16)
This simple bound is easy to calculate and also a surprisingly good indicator of the actual behavior of the
material, which has the following implications.
A material that is cubic above the Curie temperature
and 001c -polarized tetragonal below has a very small
set of spontaneous polarizations and no set of spontaneous strains unless the ceramic has a 001c texture.
Indeed, each grain has only three possible spontaneous
strains so that it is limited to only two possible deformation modes. Consequently the grains simply constrain
Part A 6.3
A polycrystal is a collection of perfectly bonded single crystals with identical crystallography but different
orientations [6.13]. The term ceramic in the case of ferroelectrics refers to a polycrystal with numerous small
grains, each of which may have numerous domains. The
functional (6.11) (with A = 0) describes all the details
of the domain pattern in each grain, and thus is rather
difficult to understand. Instead it is advantageous to replace the energy density W in the functional (6.1) with
W̄, the effective energy density of the polycrystal. The
energy density W describes the behavior at the smallest
length scale, which has a multiwell structure as dis-
cussed earlier. This leads to domains, and Ŵ x, ε, p
is the energy density of the grain at x after it has formed
a domain pattern with average strain η and average polarization p. Note that this energy is zero on a set Z S ,
which is larger than the set Z. Z S is the set of all
possible average spontaneous or remnant strains and
polarizations that a single crystal can have by forming domain patterns. However, Ŵ and Z S can vary from
grain to grain. The collective behavior of the polycrystal is described by the energy density, W̄. W̄(ε, p) is the
energy density of a polycrystal with grains and domain
patterns when the average strain is ε∗ and the average
polarization is p∗ . Notice that it is zero on the set Z P ,
which is the set of all possible average spontaneous or
remnant strains and polarization of the polycrystal. The
size of the set Z P is an estimate of the ease with which
a ferroelectric polycrystal may be poled, and also the
strains that one can expect through domain switching.
A rigorous discussion and precise definitions are given
by Li and Bhattacharya [6.14].
The set Z S is obtained as the average spontaneous
polarizations and strains that a single crystal can obtain
This is the case in materials with a cubic nonpolar
high-temperature phase, and tetragonal, rhombohedral
or orthorhombic ferroelectric low-temperature phases;
explicit formulas are given in [6.14]. This is not the
case in a cubic–monoclinic transformation, but one can
estimate the set in that case.
In a ceramic, the grain x has its own set Z S (x),
which is obtained from the reference set by applying
the rotation R(x) that describes the orientation of the
grain relative to the reference single crystal. The set Z p
of the polycrystal may be obtained as the macroscopic
averages of the locally varying strain and polarization
fields, which take their values in Z S (x) in each grain x.
An explicit characterization remains an open problem
(and sample dependent). However, one can obtain an
insight into the size of the set by the so-called Taylor
bound Z T , which assumes that the (mesoscale) strain
and polarization are equal in each grain. Z T is simply
the intersection of all possible sets Z S (x) corresponding
to the different grains as x varies over the entire crystal.
It is a conservative estimate of the actual set Z p :
166
Part A
Solid Mechanics Topics
each other. Similar results hold for a material which is
cubic above the Curie temperature and 111c -polarized
rhombohedral below it unless the ceramic has a 111c
texture. These results imply that tetragonal and rhombohedral materials will not display large strain unless they
are single crystals or are textured. Furthermore, it shows
that it is difficult to pole these materials. This is the situation in BaTiO3 at room temperature, PbTiO3 , or PZT
away from the morphotropic phase boundary (MPB).
The situation is quite different if the material is either monoclinic or has a coexistence of 001c -polarized
tetragonal and 111c -polarized rhombohedral states
below the Curie temperature. In either of these situations, the material has a large set of spontaneous
polarizations and at least some set of spontaneous
polarizations irrespective of the texture. Thus these materials will always display significant strain and can
easily be poled. This is exactly the situation in PZT
at the MPB. In particular, this shows that PZT has
large piezoelectricity at the MPB because it can easily
be poled and because it can have significant extrinsic
strains [6.14].
6.4 Ferromagnets
Part A 6.4
Magnetostrictive materials are ferromagnetics that are
spontaneously magnetized and can be demagnetized by
the application of external magnetic field and/or stress.
Ferromagnets exhibit a spontaneous, reversible magnetization and an associated hysteresis behavior between
magnetization and magnetic field. All magnetic materials exhibit magnetostriction to some extent and the
spontaneous magnetization is a measure of the actuation
strain (magnetostriction) that can be obtained. Application of external magnetic fields to materials such as
iron, nickel, and cobalt results in a strain on the order
of 10−5 –10−4 . Recent advances in materials development have resulted in large magnetostriction in ironand nickel-based alloys on the order of 10−3 –10−2 .
The most notable examples of these materials include
Tb0.3 Dy0.7 Fe2 (Terfenol-D) and Ni2 MnGa, a ferromagnetic shape-memory alloy [6.15,16]. A well-established
approach that has been used to model magnetostrictive materials is the theory of micromagnetics due to
Brown [6.17]. A recent approach known as constrained
theory of magnetoelasticity proposed by DeSimone and
James [6.15, 18] is presented here, which is more suited
for applications related to experimental mechanics.
6.4.1 Theory
The potential energy of a magnetostrictive solid can be
written as [6.15, 18],
Φ(ε, M, θ) = Φexch + Φmst + Φext + Φmel ,
(6.17)
where Φexch is the exchange energy, Φmst is the magnetostatic or stray-field energy, Φext is the energy
associated with the external magnetomechanical loads
consisting of a uniform prestress σ0 applied at the
boundary of S, and of a uniform applied magnetic field
H0 in V . The expression (6.17) is similar to the ex-
pression for the potential energy of a ferroelectric solid
in (6.11). The arguments for the ferroelectric solid for
neglecting the first two terms in the exchange energy
and the stray-field energy are also applicable to the
magnetostrictive solids under appropriate conditions,
namely
1. that the specimen is much larger than the domain
size so that the exchange energy associated with the
domain walls can be neglected, and
2. that the sample is shielded so that energy associated
with the stray fields is negligible. Such an approach
enables one to explore the implications of the energy minimization of (6.17). However, shielding the
sample is a challenge and needs careful attention.
The energy associated with the external loading is
written
(6.18)
Φext = − t0 · u dS − H0 · m dV .
S2
V
The magnetoelastic energy that accounts for the deviation of the magnetization from the favored crystallographic direction can be written
(6.19)
Φmel = W(ε, m) dV .
V
The magnetoelastic energy density W is a function of
the elastic moduli, the magentostrictive constants, and
the magnetic susceptibility, and is analogous to (6.12).
For a given material, W can be minimized when evaluated on a pair consisting of a magnetization along
an easy direction and of the corresponding stress-free
strain. In view of the crystallographic symmetry, there
will be several, symmetry-related energy-minimizing
magnetization (m) and strain (ε) pairs, analogous to the
Active Materials
electrostrictive solids explored in Sect. 6.3.2. Assuming that the corresponding minimum value of Wis zero,
one can define the set of energy wells of the material,
K [(ε(i) , m(i) )], which is analogous to the energy
Z = ∪i=1
wells for ferroelectric solids shown in Fig. 6.5; W increases steeply away from the energy wells. Necessary
conditions for compatibility between adjacent domains
in terms of jumps in strain and magnetization have been
established and have a form similar to (6.13). Much
of the discussion concerning domain patterns in ferroelectric solids presented in Sect. 6.3 is applicable to
magentostrictive solids, with magnetization in place of
electric polarization.
6.4.2 Magnetostriction
The application of mechanical loading (stress) can
demagnetize ferromagnets by reorienting the magnetization axis, which can be counteracted by an applied
magnetic field. This competition between applied magnetic field and dead loading (constant stress) acting on
the solid provides a competition, leading to nucleation
and propagation of magnetic domains across a specimen
that can give rise to large magnetic actuation.
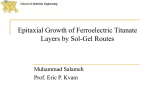
For Terfenol-D, the material with the largest
known room-temperature magnetostriction, the energy
wells comprising Z are eight symmetry-related variants. Experiments on Terfenol-D by Teter et al.,
illustrate the effect of crystal orientation and applied stress on magnetostriction and are reproduced
in Fig. 6.6 [6.19]. Interesting features of the results
References
Magnetostriction (x 10 –3 )
2.5
[111]
2
[112]
1.5
1
0.5
[110]
0
–2000
–1000
0
1000
2000
Field (Oe)
Fig. 6.6 Magnetostriction versus applied magnetic field
for three mutually orthogonal directions in single-crystal
Terfenol-D at 20 ◦ C and applied constant stress of 11 MPa.
(after 6.19 with permission. Copyright 1990, AIP)
include the steep change in energy away from the
minimum (th ereference state at zero strain) and the
varying amounts of hysteresis for different orientations. The constrained theory of magnetoelasticity
described above can reproduce qualitative features of
the experiments based on energy-minimizing domain
patterns. An important aspect of modeling magnetostriction hinges on the ability to measure the
magnetoelastic energy density, W, and the associated
constants.
6.2
6.3
6.4
6.5
6.6
P. Krulevitch, A.P. Lee, P.B. Ramsey, J.C. Trevino,
J. Hamilton, M.A. Northrup: Thin film shape memory alloy microactuators, J. MEMS 5, 270–282
(1996)
D. Damjanovic: Ferroelectric, dielectric and piezoelectric properties of ferroelectric thin films and
ceramics, Rep. Prog. Phys. 61, 1267–1324 (1998)
L.L. Hench, J.K. West: Principles of Electronic Ceramics (Wiley, New York 1990)
C.Z. Rosen, B.V. Hiremath, R.E. Newnham (Eds):
Piezoelectricity. In: Key Papers in Physics (AIP, New
York 1992)
Y. Xu: Ferroelectric Materials and Their Applications
(North-Holland, Amsterdam 1991)
K. Bhattacharya, G. Ravichandran: Ferroelectric
perovskites for electromechanical actuation, Acta
Mater. 51, 5941–5960 (2003)
6.7
6.8
6.9
6.10
6.11
6.12
L.E. Cross: Ferroelectric ceramics: Tailoring properties
for specific applications. In: Ferroelectric Ceramics,
ed. by N. Setter, E.L. Colla (Monte Verita, Zurich 1993)
pp. 1–85
F. Jona, G. Shirane: Ferroelectric Crystals (Pergamon,
New York 1962), Reprint, Dover, New York (1993)
A.F. Devonshire: Theory of ferroelectrics, Philos.
Mag. Suppl. 3, 85–130 (1954)
Y.C. Shu, K. Bhattacharya: Domain patterns and
macroscopic behavior of ferroelectric materials, Philos. Mag. B 81, 2021–2054 (2001)
E. Burcsu, G. Ravichandran, K. Bhattacharya: Large
electrostrictive actuation of barium titanate single
crystals, J. Mech. Phys. Solids 52, 823–846 (2004)
C. Franck, G. Ravichandran, K. Bhattacharya: Characterization of domain walls in BaTiO3 using
simultaneous atomic force and piezo response
Part A 6
References
6.1
167
168
Part A
Solid Mechanics Topics
6.13
6.14
6.15
force microscopy, Appl. Phys. Lett. 88, 1–3 (2006),
102907
C. Hartley: Introduction to materials for the experimental mechanist, Chapter 2
J.Y. Li, K. Bhattacharya: Domain patterns, texture
and macroscopic electro-mechanical behavior of
ferroelectrics. In: Fundamental Physics of Ferroelectrics 2001, ed. by H. Krakauer (AIP, New York 2001)
p. 72
A. DeSimone, R.D. James: A constrained theory of
magnetoelasticity, J. Mech. Phys. Solids 50, 283–320
(2002)
6.16
6.17
6.18
6.19
G. Engdahl, I.D. Mayergoyz (Eds.): Handbook of Giant Magnetostrictive Materials (Academic, New York
2000)
W.F. Brown: Micromagnetics (Wiley, New York
1963)
A. DeSimone, R.D. James: A theory of magnetostriction oriented towards applications, J. Appl. Phys. 81,
5706–5708 (1997)
J.P. Teter, M. Wun-Fogle, A.E. Clark, K. Mahoney:
Anisotropic perpendicular axis magnetostriction in
twinned Tbx Dy1−x Fe1.95 , J. Appl. Phys. 67, 5004–5006
(1990)
Part A 6