Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Moment of inertia wikipedia , lookup
Field (physics) wikipedia , lookup
Time in physics wikipedia , lookup
Special relativity wikipedia , lookup
Vector space wikipedia , lookup
Minkowski space wikipedia , lookup
Euclidean vector wikipedia , lookup
Nordström's theory of gravitation wikipedia , lookup
Metric tensor wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Vector Spaces in Physics
8/6/2015
Chapter 6. Rotations and Tensors
There is a special kind of linear transformation which is used to transforms coordinates
from one set of axes to another set of axes (with the same origin). Such a transformation
is called a rotation. Rotations have great practical importance, in applications ranging
from tracking spacecraft to graphical display software. They also play a central role in
theoretical physics
The linear transformation corresponding to a rotation can be described by a matrix. We
will describe the properties of rotation matrices, and discuss some special ones.
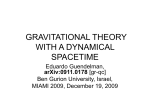
A. Rotation of Axes.
In chapter 1 we considered a rotation
of a Cartesian coordinate system
about the z-axis by an angle . A
more general case is shown in figure
6-1, where the axes are transformed
by rotation into an arbitrary second
set of axes. (We take both sets or
axes to be right handed.
Transformation to a left-handed
coordinate system is to be avoided,
unless you really know what you are
doing.) A typical vector A is also
shown.
z
z'
A
y'
eˆ3 '
ê1
ê3
eˆ2 '
y
eˆ1 ' ê2
x'
x
Figure 6-1. Two sets of Cartesian coordinate axes.
The (x',y',z') system is obtained from the (x,y,z)
system by a rotation of the coordinate system.
Figure 6-2 (a) shows the components
of A in the (eˆ1 , eˆ2 , eˆ3 ) system, and
figure 6-2 (b) shows its coordinates in the (eˆ1 , ' eˆ2 , ' eˆ3 ' ) system. We see that we can write
A , using components in the unprimed system, as
A eˆi Ai ;
(6-1)
or, using components in the primed frame, as
A eˆi ' Ai '
(6-2)
The standard definitions of components are clear from (6-1) and (6-2):
Ai eˆi A,
Ai ' eˆi ' A.
We can, however, relate the primed components to the unprimed, as follows:
6-1
(6-3)
Vector Spaces in Physics
8/6/2015
A ' eˆ j ' A
j
eˆ j ' ( Al eˆl )
(6-4)
eˆ j ' eˆl Al
C jl Al
(a)
z
A
z
(b)
eˆ3 A3
A
z'
eˆ3 A3
y'
eˆ3 '
y
eˆ1 A1
ê3 eˆ '
2
ê1
eˆ1 ' ê2
y
eˆ2 A2
eˆ1 A1
eˆ2 A2
x'
x
x
Figure 6-2. The vector A expressed in terms of its (eˆ1 , eˆ2 , eˆ3 ) components (a), and in terms of its
(eˆ1 , ' eˆ2 , ' eˆ3 ' ) components (b).
That is to say that the relationship between primed and unprimed components can be
expressed as a matrix equation,
(6-5)
A' C A ,
where the transformation matrix C is given by
C C jl (eˆ j ' eˆl ) .
(6-6)
There is an interpretation of the coefficients Cjl in terms of angles. Since all of the eˆj
and eˆl are unit vectors, the dot product of any two is equal to the cosine of the angle
between them:
(6-7)
eˆm ' eˆn cosm'n .
Example: Consider a rotation by an angle in the counter-clockwise sense about the z
axis, as described in Chapter 1. Since the z axis is the same in the primed and unprimed
systems, certain of the coefficients C jl eˆ j ' eˆl are especially simple:
C 33 1,
C 31 C 32 C13 C 23 0
The other coefficients can be read off from figure (2-4):
6-2
;
(6-8)
Vector Spaces in Physics
8/6/2015
C11 î 'î cos ,
C 22 ĵ' ĵ cos ,
C12 î ' ĵ sin ,
;
(6-9)
C 21 ĵ'î - sin .
and so
cos sin 0
(6-10)
C sin cos 0 Rz ( ) .
0
0
1
The matrices corresponding to rotations about the x and y axes can be calculated in a
similar way; the results are summarized below.
0
0
1
Rx ( ) 0 cos sin
0 sin cos
cos
Ry ( ) 0
sin
cos
Rz ( ) sin
0
0 sin
1
0 .
0 cos
sin
cos
0
(6-11)
0
0
1
B. Some properties of rotation matrices.
Orthogonality. Consider the definition of the transformation matrix C :
C C jl (eˆj eˆl ) .
(6-6)
If we form the product of C and its transpose, we get
CC T CimC T ml
il
CimClm
eˆi ' eˆmeˆl ' eˆm
.
(6-12)
eˆi ' eˆmeˆm eˆl '
But, the vector eˆl , like any vector, can be written in terms of its components in the unprimed frame,
(6-13)
eˆl eˆm (eˆm eˆl ) .
In this sum, (eˆm eˆl ) is the m-th component of the vector eˆl in the unprimed frame. So,
equation (6-12) becomes
6-3
Vector Spaces in Physics
8/6/2015
CC il eˆi ' eˆl ' .
T
(6-14)
il
or
CC T I .
The equivalent statement in index notation is
Cij Clj il .
(6-15)
(6-15a)
A similar calculation for the product C T C leads to
CT C I
.
CliClj il
(6-15b)
This leads us to define orthogonality as follows:
For an orthogonal matrix, the
transpose matrix is also the inverse
matrix.
C T C CC T I
Cli Clj Cil C jl il
(6-15c)
[Note: We have not used the condition that either eˆi , i 1,3 or eˆi , i 1,3 form a righthanded coordinate system, so orthogonal rotations include both rotations and
transformations consisting of a rotation and a reflection. More about this distinction
later.]
Example: Show that the rotation matrix of (6-10) above is orthogonal.
Solution:
CC
T
cos
sin
0
sin
cos
0
0 cos
0 sin
1 0
cos2 sin 2
sin cos sin cos
0
sin
cos
0
0
0
1
sin cos sin cos
sin 2 cos2
0
0
0 . (6-16)
1
I
Determinant. It is easy to verify the following fact: The determinant of an orthogonal
matrix must be equal to either +1 or -1. (The proof is left to the problems.) If its
determinant is equal to +1, it is said to be a proper orthogonal matrix. All rotation
matrices are proper orthogonal matrices, and vice versa. Rotation matrices must have a
determinant of +1. However, this is not the only condition for a square matrix to be a
rotation matrix. It must also have the property that its transpose is equal to its inverse.
6-4
Vector Spaces in Physics
8/6/2015
NOTE: All rotation matrices are orthogonal; but not all orthogonal matrices are
rotation matrices. Can you explain why?
C. The Rotation Group
Rotations are linear operators which transform three coordinates {xi} as seen in one
coordinate system into three coordinates {x'i} in another system. All vectors transform in
this same way, as given in equation (6-4) above:
A j ' C jl Al
(6-4)
We have shown that C must be orthogonal, and have determinant equal to +1.
Multiplication of two rotation matrices gives another square matrix, and it must also be a
rotation matrix, since carrying out two rotations, one after another, can be represented by
a single rotation. So, the rotation group is defined as follows.
Definition. The "rotation group" consists of the set of real orthogonal 3x3 matrices with
determinant equal to +1.
(a) Group multiplication is just matrix multiplication according to the standard
rules.
(b) The group is closed under multiplication.
(c) The identity matrix is the identity of the group.
(d) For every element A of the group, there exists an element A-1, the inverse of
A, such that AA1 I .
(e) Multiplication satisfies A BC AB C .
These properties are easy to prove and are left to the exercises.
D. Tensors
What are tensors? Tensors look like matrices; but only certain types of matrices are
tensors, as we shall see. They must transform in a certain way under a rotation of the
coordinate system. Vectors, with one index, are tensors of the first rank. Other objects,
such as the rotation matrices themselves, may have more than one index. If they
transform in the right way, they are considered to be higher-order tensors. We will first
discuss rotations, then define tensors more precisely.
Under a rotation of the coordinate system, the components of the displacement vector
x change in the following way:
(6-17)
xi = Rij x j .
The tensor transformation rules represent a generalization of the rule for the
transformation of the displacement vector.
Tensors of Rank Zero. A rank-zero tensor is an object g which is invariant under
rotation:
Rank - zero tensor : g g
(6-17a)
6-5
Vector Spaces in Physics
8/6/2015
Tensors of Rank One. Modeled on the rotation properties of vectors, we define a
tensor of rank one as an object with a single index, C = { C i ,i = 1,3} or just Ci for short,
such that the components Ci' in a rotated coordinate system are given by
(6-18)
First - Rank Tensor : Ci = RijC j .
Tensors of Rank Two. A second-rank tensor is an object with two indices,
D = { Dij ,i, j = 1,3} or Dij for short, such that its components Dij' in a rotated coordinate
system are given by
(6-19)
Second - Rank Tensor:
Dij = Rik R jl Dkl .
That is to say, each of the two indices transforms like a single vector index.
Tensors of Rank Three. Following the same pattern, a third-rank tensor Hijk follows
the transformation law
(6-19)
Third - Rank Tensor : H ijk = R il R jm R kn H lmn .
And so on.
Much of the power of tensor analysis lies in the ease in which new tensors can be
created, with their transformation properties under rotations just determined by the
number of tensor indices. Here are two theorems about creation of tensors which we
offer without proof.
Tensor Products: The direct product of a tensor of rank n and a tensor of rank m
is a tensor of rank n+m.
Thus, for instance, the product of two vectors, AiBj, is a second-rank tensor.
Contraction of Indices: If two tensor indices are set equal (and so summed), the
resulting object is a tensor of rank lower by two than that of the original tensor.
Example: Let us consider the contraction
of the two indices of the tensor AiBj:
(6-20)
Ai Bi A B .
The fact that this dot product is a zero-rank tensor guarantees that it has the same
value in all coordinate systems.
Special Tensors. The Kronecker delta symbol and the Levi-Civita symbol have
indices which look like tensor indices - but their components are defined to be the same
regardless of the coordinate system. Can they still transform like tensors, of rank two and
three, respectively? This is in fact the case; the proof is left for the problems. This
means that these two tensors can be used in conjunction with vectors and other tensors to
make new tensors.
6-6
Vector Spaces in Physics
8/6/2015
Example: Consider the following tensor operations: First form the direct
product ijkAlBm of the Levi-Civita tensor with two vectors A and B. Then
perform two contractions of indices, by setting l=j and m=k. This produces the
following object, with one free index:
l j
ijk Al Bm
ijk A j B k (AxB )i .
(6-21)
mk
This is what we call the cross product or vector product. The theorems about
tensor indices guarantee, since it has one free index, that it does in fact transform
like a vector under rotations.
Example: The trace and determinant of a tensor are both scalars, since all the
free tensor indices are removed by contraction. Thus, the trace and determinant
of a matrix are the same in all coordinate systems, provided that the matrix itself
transforms like a tensor.
E. Coordinate Transformation of an Operator on a Vector Space.
Here is an explanation of the transformation law for a second-rank tensor. Consider an
operator O operating on a vector A to produce another vector B :
(6-22)
B OA .
Tensors are all about looking at something from another point of view - in a rotated
coordinate system. So, if we write quantities in the rotated coordinate system with a
prime, the other point of view is
(6-23)
B OA .
Under rotations, every vector is just multiplied by R . If we apply this to both sides of
equation (6-22) it becomes
(6-24)
RB R OA .
Now insert between O and A a factor of the identity matrix, which we can write as
I R 1 R R T R , where we have used the fact that R's inverse is just its transpose.
RB ROA
ROR T RA
.
(6-25)
ROR T RA
This just shows the operator working in the rotated coordinate system, as shown in
(6.23), provided that the operator in the rotated coordinate system is given by
O ROR T .Similarity Transformation (6-26)
This process, of sandwiching a square matrix between R and its inverse, is called a
similarity transformation.
But . . . shouldn't O transform like a second-rank tensor? Let's write 6-26) in tensor
notation,
6-7
Vector Spaces in Physics
8/6/2015
T
Oij Ril Olm Rmj
Ril Olm R jm .
(6-27)
Ril R jm Olm
This is exactly the transformation law for a second-rank tensor given in eq. (6-19).
This means that laws like
(6-28)
B OA .
can be used in any coordinate system, provided that vectors and operators are
transformed appropriately from one coordinate system to another. This sounds a little
like Einstein's (really Galileo's) postulate about the laws of physics being the same in all
inertial frames. And this is no accident. When laws are written explicitly in terms of
tensors, they are said to be in "covariant form." It makes for beautiful math, and
sometimes beautiful physics.
F. The Conductivity Tensor. There are many simple physical laws relating vectors.
For instance, the version of Ohm's law for a
distributed medium is
z
(6-29)
J E .
E
This law asserts that when an electric field
E is applied to a region of a conducting
material, there is a flux of charge J in the
same direction, proportional to the
magnitude of E . This seems simple and
right. But is it right? ("A physical law
should be as simple as possible -- but no
simpler," Einstein.)
A more general relation can be obtained,
following the principle that J must
x
transform like a vector. We can combine J
Figure 6-3. Graphite, represented as layers (of
in various ways with tensor quantities
hexagonally bonded carbon) stacked one on top
representing the medium, as long as there is
of another.
one free index. The two obvious relations
are
J E J i Ei
scalar conductivity
.
(6-30)
J E J i ij E j tensor conductivity
The scalar relation causes current to flow in the direction of the electric field. But the
tensor relation allows the current to flow off in a different direction. What kind of
medium would permit this?
Graphite is a material which is quite anisotropic, so we might expect a relation of more
complicated directionality. Figure 6-3 shows the model we will take, of planes of carbon
atoms where electrons flow easily, the planes stacked in such a way that current flow
6-8
y
Vector Spaces in Physics
8/6/2015
from one plane to another is more difficult. We can set up a conductivity matrix as
follows. From symmetry, we would expect that an electric field in the x-y plane would
cause a current in the direction of E , with conductivity 0 "in the planes." And, also
from symmetry, an electric field in the z direction should cause current to flow in the z
direction, but with a much smaller conductivity 1. This can be written in matrix form as
0 0 0 E1
(6-31)
J E 0 0 0 E2 .
0 0 E
1 3
If you multiply this out, you see that the first two components of E (the x and y
components) are multiplied by 0, and the third component, by 1.
But what if for some reason it is better to use a rotated set of axes? Then the applied field
and the conductivity tensor both need to be transformed to the new coordinate system,
and their product will produce the current density in the new coordinate system. Note
that scalar quantities, like J E , are zero-th rank tensors and should have the same value
in both coordinate systems.
Numerical Example. In equation (6-31), let's take 1 = 0.1 * 0 (weak current
perpendicular to the graphite planes) and have the electric field in the y-z plane, at an
angle of 45 from the y axis, as shown in figure (6-3):
0
1 0 0
2
E E0
, 0 0 1 0 .
(6-32a)
2
0 0 0.1
2
2
This gives for the current density J in the original coordinate system,
0
0
1 0 0
2
2
J E 0 E0 0 1 0
(6-32b)
0 E0 2 .
0 0 0.1 2
2
2
2
20
The z component of the current is small compared to the y component, and so the current
vector moves closer to the plane of good conduction.
Now let's see what happens in a rotated coordinate system. Let's go to the system where
the electric field is along the z axis. This requires a rotation about the x axis of 45 .
Using the form of this matrix given in eq. (6-11) above, we have
6-9
Vector Spaces in Physics
8/6/2015
1 0
2
R Rx ( 45) 0
2
2
0
2
In this system the electric field vector is simpler:
1 0
0
2
2
E RE E0 0
2
2
2
2
0
2
2
And the conductivity tensor becomes
R RT
1
0 0
0
0
1
2
2
0
2
2
0
2
2
2
2
1 0
0 1
2
2
0 0
0
2
2
2
2
0
0
2
2
0
0
1
0 0 0.55 0.45
0 0.45 0.55
0
0
2
.
2
2
2
(6-33)
0
0
2
E0 0 ;
2
1
2
2
1
0
0 0
2
1 0 0
2
0 0.1
2
0
2
0
0
2
2
2
2
2
2
20 20
(6-34)
0
2
2
2
2
;
(6-35)
Now here is the punch line: We can either rotate J (calculated in the original coordinate
system) into the rotated coordinate system; or we can calculate it directly, using the
electric field and the conductivity tensor expressed in the rotated coordinate system.
Here goes:
6 - 10
Vector Spaces in Physics
8/6/2015
1 0
0 0
0
2
2 2
J RJ 0 E0 0
0 E0 0.45 ;
2
2
2
0.55
2
2 2
0
2
2 20
And the other way:
0
0 0
1
0
J E 0 E0 0 0.55 0.45 0 0 E0 0.45 ;
0 0.45 0.55 1
0.55
It works - same result either way. Here is the interpretation of this example.
(6-36)
(6-36)
The equation
J E
produces the current density flowing in a medium (a vector) in terms of the electric field
in the medium (also a vector). But . . . the current does not necessarily flow in the
direction of the applied electric field. The most general vector result caused by another
vector is given by the operation of a second-rank tensor!
In a simple physics problem, the conductivity tensor will have a simple form, in a
coordinate system which relates to the structure of the material. But what if we want to
know the current flowing in some other coordinate system? Just transform the applied
field and the conductivity tensor to that coordinate system, and use
J E
x
v
G. The Inertia Tensor.
In classical mechanics, a rigid body which is
r
rotating about its center of mass had angular
L
momentum. The rate of rotation at a particular
x
instant of time can be described by a vector, ,
x
which is in the direction of the axis of rotation, with
magnitude equal to the angular speed, in
Figure 6-4. Displacement and velocity,
radians/sec. The angular momentum is also given
and the resulting angular momentum.
by a vector, L , which is equal to the sum (or
integral) of the individual angular momenta of the parts of the rigid body, according to
(6-37)
dL dm r v .
In certain cases, such as when the rotation is about an axis of symmetry of the object, the
relation between L and is simple:
(6-38)
L I .
6 - 11
Vector Spaces in Physics
8/6/2015
Here I is the moment of inertia discussed in a first
course in mechanics.
v r
r
However, surprisingly enough, the resultant total
angular momentum vector L is not in general parallel
to . The general relation involves an angularmomentum tensor, I , rather than the scalar moment
of inertia. The general relation is
L I . (6- Figure 6-5. A rigid body, rotating about
an axis through the origin.
39)
where now, for a body approximated by N discrete point masses,
N
L Li
i 1
and
(6-39)
Li mi ri vi
is the angular momentum of the i-th mass. The velocity of a point in the rotating body is
given by
vi ri ,
and so
dL dm r v
dm r r
We will evaluate the double cross product using tensor notation and the epsilon killer.
dLi dm r r i
dm ijk rj klml rm
dm kij klm rj l rm
(6-41)
dm il jm im jl rj l rm
dm
Problems
The Pauli matrices are special 2x2 matrices associated with the spin of particles like the
electron. They are
0 1
0 i
1 0
, 2
, 3
.
1
1
0
i
0
0
1
(Here “i” represents the square root of -1.)
Problem 6-1. (a) What are the traces of the Pauli matrices?
(b) What are the determinants of the Pauli matrices?
(c) Are the Pauli matrices orthogonal matrices? Test each one
6 - 12
Vector Spaces in Physics
8/6/2015
Problem 6-2. The Pauli matrices are claimed to satisfy the relation
j k k j 2i jkl l
Test this relation, for j=2, k=3.
0 i
Problem 6-3. In Problem 6-1 above one of the Pauli matrices, 2
, did not
i 0
turn out to be orthogonal. For matrices with complex elements a generalized relationship
must be used:
CC † C †C I
C is unitary
†
where the "Hermetian conjugate" matrix C is the complex conjugate of the transpose
matrix.
(a) Calculate the Hermetian conjugate 2† of the second Pauli matrix.
(b) Check and see if it is unitary.
[Unitary matrices become important in quantum mechanics, where one cannot avoid
working with complex numbers.]
Problem 6-5. Using the fact that the determinant of the product of two matrices is the
product of their determinants, show that the determinant of an orthogonal matrix must be
equal to either +1 or -1. Hint: Start with the orthogonality condition AT A I .
Problem 6-6. For each of the three matrices below, say whether or not it is orthogonal,
and whether or not it is a rotation matrix. Justify your answers.
2
2
0
0 0 1
4 3 0
2
2
1
A 0 1 0 , B 3 4 0 , C 0 1
0
5
1 0 0
0 0 5
2
2
0
2
2
Problem 6-7. Consider rotations Rx() and Rz(), with the matrices Rx and Rz as defined
in the text. Here represents the angle of a rotation about the x axis and represents the
angle of a rotation about the z axis.
First, calculate the matrices representing the result of carrying out the two rotations in
different orders:
A Rx Rz
and
B Rz Rx .
Comparing A and B , do you find that the two rotations Rx and Rz commute?
6 - 13
Vector Spaces in Physics
8/6/2015
Next, look at your results in the small-angle approximation (an approximation where
you keep only terms up to first order in the angles and ). Does this change your
conclusion?
Problem 6-8. Show algebraically that the rotation group is closed under multiplication.
that is, show that, for A and B members of the rotation group, the product matrix C = AB
is orthogonal and has determinant equal to +1.
Problem 6-10. The Kronecker delta symbol is defined to have constant components,
independent of the coordinate system. Can this be true? That is to say, is it true that
?
ij Ril R jm lm ij
Use the orthogonality of the transformation matrix Rij to show that this is true.
Problem 6-11. The Levi-Civita symbol ijk, defined previously, has specified constant
values for all of its components, in any frame of reference. How can such an object be a
tensor - that is, how can these constant values be consistent with the transformation
properties of tensor indices? Well, they are! Consider the transformation equation
ijk = Ril R jm R kn lmn ,
where R is a rotation matrix, satisfying the orthogonality condition RijRik = jk, and ijk is
the Levi-Civita symbol. The question is, does ' have the same values for all of its
components as ? As a partial proof (covering 21 of the 27 components), prove that
ijk = 0
if any two of the indices {i,j,k} are equal.
Note: in carrying out this proof, set two indices to the same value - but do not sum over
that index. This operation falls outside of the Einstein summation convention.
Problem 6-12 Tensor transformation of the Levi-Civita symbol. (Challenge
Problem) Prove that under transformations of tensor indices by an orthogonal matrix R,
the Levi-Civita tensor transforms according to the rule
ijk = ijk det( R ) .
Problem 6-13 Invariance of length under rotation. The length of a vector is a scalar,
and so should not change from one coordinate system to another. To check this, use the
vectors E and J from the conductivity example in the text. See if they have the same
magnitude in both coordinate systems used.
Problem 6-14 Invariance of a scalar product under rotation. The inner product of
two vectors is a scalar, and so should not change from one coordinate system to another.
To check this, use the vectors E and J from the numerical example in the discussion of
tensor conductivity in this chapter. See if the inner product E J is the same in both
coordinate systems used.
6 - 14
Vector Spaces in Physics
8/6/2015
Problem 6-15. Return to the numerical example in the discussion of tensor conductivity
in this chapter. Suppose that the electric field E in the original system still has
0
magnitude E0, but is directed along the positive z axis; that is, E 0
E
0
(a) Calculate the current density J E in the unprimed system.
(b) Now consider the same rotation, using R from the example in the text, and calculate
J E in the primed system. (Note: has already been calculated in the notes.)
(c) Now calculate the current density in the primed system by the alternate method,
J RJ . Compare with the result from part (b).
6 - 15