Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Photon polarization wikipedia , lookup
Routhian mechanics wikipedia , lookup
Old quantum theory wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Center of mass wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Monte Carlo methods for electron transport wikipedia , lookup
N-body problem wikipedia , lookup
Classical mechanics wikipedia , lookup
Atomic theory wikipedia , lookup
Mass versus weight wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Hunting oscillation wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Equations of motion wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Work (physics) wikipedia , lookup
Centripetal force wikipedia , lookup
Newton's laws of motion wikipedia , lookup
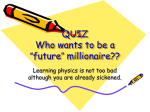
Gravitation and Other Central Forces Vern Lindberg July 14, 2010 1 Introduction, the Universal Law of Gravity, and Coulomb’s Law Central forces, forces between two point objects that point along the line joining the objects, are of widespread interest in physics. We have already discussed the isotropic harmonic oscillator in 2 and 3 dimensions. The general law of gravity, the force that holds the universe together, is treated in the non-relativistic sense as a central force, and planetary motion was one of the first applications of mechanics (and remains an active field, http: //en.wikipedia.org/wiki/Asteroid_impact_avoidance). The Coulomb force between charges is also a central force, involved in atomic physics (recall the Bohr model of the atom) and in Rutherford scattering. In this chapter we will discuss the gravitational problem in detail, but also point out expressions that are true for all central forces, attractive or repulsive. Historically, the motion of the stars and planets was of paramount philosophical, religious, and physical study. Fixed stars were arrayed into constellations with great myths around them. The planets, asteres planetai or wandering stars, Mercury, Venus, Mars, Jupiter, Saturn, the Sun and the Moon were studied carefully in order to predict the fates of mankind. Johannes Kepler, working with careful records of Tycho de Brahe determined empirical laws of motion, and set the sun at the center of the solar system. Galileo Galilei improved on the Dutch spyglasses and created a telescope (8x magnification), looked at the planets and got in big trouble. Isaac Newton founded much of mechanics, as well as calculus, and could derive Kepler’s Laws. We will not discuss General Relativity at all. Newton’s Law of Universal Gravitation begins with two point masses—objects with diameters much smaller than their separation. 1 Figure 1: Point masses, separation, and forces. The notation F~i→j means gravitational force acting on j due to i. The force is mi mj F~i→j = −G 2 r̂i→j rij (1) Here r̂i→j is a unit vector at the location of mj pointing away from mi , that is along the direction from mi toward mj . Note that the force is attractive, proportional to the masses, and inversely proportional to the square of separation distance. My form of the equation differs a bit from that of Fowles and Cassiday, Eq. 6.1.1, but says the same thing in what I think is clearer notation. Measuring the value of the gravitational constant G is very hard, and it is the least precisely measured1 of the fundamental physical constants. The most recent value from NIST (more recent than the text) is G = (6.67428 ± 0.00067) × 10−11 N · m2 /kg2 2 (2) Gravitational Force between a Spherical Shell and a Point Object By 1669 Newton had the universal law figured out, but did not publish for another 7 years. What he needed to figure out was the gravitation force between objects that are not point-like. To do this he needed to develop calculus. Consider a uniform spherical shell of mass M and radius R and a point object of mass m. The separation of the point from the center of the shell is r > R. The text sets up the integral needed to find the net gravitational force. The result is the same as the force between point objects. The fractional uncertainty in G is 1×10−4 , compared to the next most uncertain quantity, Boltzmann’s constant, known to a fractional uncertainty of 2 × 10−6 . 1 2 By extension, any spherically symmetric object obeys this law: spherical symmetry means that the density depends at most on the distance from the center of the spherical object, but not on the angular location. If the point object is inside the spherical shell, there is no gravitational force between them. This is analogous to the electric case, and is easily derived using the Gauss’s Law for Gravity. Define the gravitational field at the location of a test object of mass m as ~g = F~ /m, then for a Gaussian surface enclosing mass M , I ~ = 4πGM ~g · dA (3) The integral is evaluated over the closed surface A. 3 Kepler’s Laws Working with data collected by Tycho de Brahe, Johannes Kepler deduced the three laws named for him. Primarily he looked at the data for Mars, visible throughout the year and having an eccentricity of 0.09, a value the text describes as “highly elliptical”. Ha! The semi-major axis is 0.44% larger than the semi-minor axis. Not “highly” in my book. I. Law of Ellipses 1609 The orbit of each planet is an ellipse with the sun located at one focus. II Law of Equal Areas 1609 A line drawn from the sun to a planet sweeps out equal area in equal times as the planet orbits the sun. III Harmonic Law 1618 The square of the sidereal period of a planet is directly proportional to the cube of the semi-major axis of the planet. Sidereal period is the period measured relative to the “fixed” stars. The text has an interesting historical description of how Robert Hooke, Edmond Halley, and Christopher Wren interacted with Newton, and how Newton proved these laws starting with the Law of Universal Gravitation. More is at http://en.wikipedia.org/wiki/Newton’ s\_law\_of\_universal\_gravitation. 4 Kepler’s Second Law: Law of Equal Areas Newton determined that this law is simply a statement of Conservation of Angular Momentum. 3 ~ (relative to an origin) of a point particle moving with linear The angular momentum, L, momentum p~ located at ~r from the origin is defined as ~ = ~r × p~ L (4) The time rate of change of this angular momentum is easily shown to be the net torque, ~. N ~ dL d(~r × p~) d~ p ~ = = ~v × p~ + ~r × = 0 + ~r × F~ ≡ N (5) dt dt dt If only central forces act the cross product, ~r × F~ = 0, the torque is zero, and the angular momentum is a constant. This has several consequences. First, the direction of the angular momentum is fixed. This means that the object must move in a two-dimensional plane. We will describe the motion using cylindrical polar coordinates. The position is ~r = rêr and the linear momentum is p~ = m(ṙêr + rθ̇êθ ). Then ~ = (rêr ) × m(ṙêr + rθ̇êθ ) = mr2 θ̇k̂ L (6) Now we need the area swept out. Figure 2 shows the motion of the object in a small time dt. The area of the shaded triangle is 1 dA = r(r dθ) (7) 2 Figure 2: Object moves a small distance in a time dt and Ȧ = dA 1 L = r2 θ̇ = = constant dt 2 2m (8) Thus for all central forces, the areal velocity, Ȧ is constant, as is the angular momentum. Example 6.4.1 An object is subject to a central force, and all circular orbits have the same area velocity. Find an expression for the force. 4 5 Review of Conic Sections Recall that one definition for a conic section uses a focus and a directrix separated by a distance q, with the type of conic section determined by the eccentricity, . If we place the origin of our coordinate system at a focus (rightmost focus if there is more than one) and deal with the on-axis case, a general conic section can be written r= q α = 1 + cos θ 1 + cos θ 1 1 + cos θ = r r0 (1 + ) (9) where α = q is the latus rectum, the distance to the conic section at θ = π/2. The closest approach of the mass to the focus, r0 , is r0 = q (1 + ) In Cartesian coordinates with the focus at the origin, (1 − 2 )x2 + 22 qx + y 2 = 2 q 2 5.1 Ellipse: < 1 We can characterize an ellipse by semi-major and semi-minor axes, a and b,with a2 − b2 = c2 a= q (1 − 2 ) b= √ q 1 − 2 r0 = (1 − )a = c a α= b2 = (1 − 2 )a a r1 = (1 + )a If we use the center of the ellipse as an origin, the equation for the on-axis ellipse is x2 y 2 + 2 =1 a2 b (10) with two foci located at x = ±c. 5.2 Parabola: = 1 For the parabola opening to the right, define r0 ≡ c as the distance from the focus to the apex. Then q = α = 2c. 5 With the focus as the origin, the equation of the parabola is y 2 = ±4c(c − x) If the apex is used as the origin, then the equation for the parabola is y 2 = 4cx 5.3 Hyperbola: > 1 Relative to the center of the branches of the hyperbolae, the foci are located at ±c and the apexes are located at ±a. The equation of the hyperbola is x2 y 2 − 2 =1 a2 b where a2 + b2 = c2 . The eccentricity is = c/a. The branches are asymptotic to lines y = ±bx/a. 6 6.1 Kepler’s First Law: The Law of Ellipses For General Central Force We start with a general central force, F~ = f (r)êr (11) We have already established that motion is in a plane with constant angular momentum ~ Define angular momentum per unit mass L. ~ ~` = L = ~r × ~v m ` = |~r × ~v | = r2 θ̇ (12) Radial acceleration in polar coordinates is ar = r̈ − rθ̇2 so the radial equation of motion is m`2 mr̈ − 3 = f (r) (13) r and the tangential equation of motion, using aθ = 2ṙθ̇ + rθ̈ = d(r2 θ̇)/dt, is d 2 (r θ̇) = 0 dt 6 (14) The tangential equation can be solved to give what we already know, r2 θ̇ = L/m = ` = constant. The radial equation becomes easier if we change variables to u = 1/r, so 1 du dθ du ṙ = − 2 = −` u dθ dt dθ dθ d du d2 u d du = −` = −`2 u2 2 r̈ = −` dt dθ dt dθ dθ dθ and the radial equation becomes d2 u f (1/u) +u=− 2 dθ mu2 `2 The energy equation will be written later. 6.2 (15) (16) (17) Universal Law of Gravity Let’s write the Universal Law of Gravity for a small planet of mass m orbiting a massive star of mass M assuming that the massive star does not move (we will relax this requirement in a later chapter.) The text uses k = GM m, I will also use K = k/m = GM . f (r) = −GM mu2 = −ku2 = −Kmu2 (18) The equation of motion is then k K d2 u +u= = 2 2 2 dθ m` ` (19) with solution K (20) `2 For simplicity, orient the axes so that θ0 = 0 and so θ = 0 is the point of closest approach. Expressing the solution for r, u = A cos(θ − θ0 ) + r= `2 /K 1 + (A`2 /K) cos θ (21) Comparing Equations 9 and 21 we recognize that the motion is a conic section with A`2 `2 α= (22) k K Consider elliptical motion. The aphelion and perihelion (farthest and closest) distances are found for θ = 0, π α α r0 = r1 = (23) 1+ 1− = 7 E.g. The sun has a mass of 1.98892 × 1030 kg. The perihelion and aphelion for the earth are 147.3 Gm and 152.1 Gm. Show that the eccentricity is 0.0160 and find the latus rectum, the value of A, the semi-major axis, and the value of `. Example 6.5.3 in Text Find the speed of a satellite in circular orbit in terms of g at the surface of the earth of radius Re and the orbital radius rc . Example 6.5.4 in Text The Hohmann Transfer. The Hohmann transfer is the most fuel efficient way to take a satellite from a circular orbit of radius rc to an elliptical orbit with an apogee of r1 2 . The transfer is an engine impulse that increases the speed of the satellite from vc to v0 . p Show that the required increase in the speed is v0 /vc = 2r1 /(rc + r1 ) and evaluate for transfer from a low earth circular orbit to an ellipse with apogee at the moon. 7 Kepler’s Third Law: The Harmonic Law This relates the period of a satellite, τ , to its semi-major axis,a. We know from Kepler’s Second Law that Ȧ = `/2 = constant. Integrating over a period we get A = `τ /2 and hence 2A τ= (24) ` It is straightforward to show that the area of an ellipse3 is A = πab, and from our knowledge of conic sections we can write √ 2πab 2πa2 1 − 2 τ= = (25) ` ` Now we know α = a(1 − 2 ) and that α = `2 /K, so with a little algebra we get τ2 = 7.1 4π 2 3 4π 2 3 a = a K GM (26) Units We could use SI units of meters, kilograms, and seconds, but it is easier to use units natural to the problem. If we are looking at planetary motion around the sun, and measure the period in years, and the semi-major axis in A.U. (astronomical units, 1 A.U. = semi-major axis of the earth), then K = GM = 4π 2 and τ 2 = a3 . 2 3 Another Hohmann transfer would then put it into circular orbit at the larger radius. Start with the equation for an ellipse relative to its center, Eq. 10 8 For satellites around the earth, measure the period in lunar months and distance in terms of L.U. = semi-major axis of the lunar orbit, and the same result occurs. For satellites of the sun velocities would have units of A.U./year and the angular momentum per unit mass would have units (A.U.2 /year.) E.g. A gps satellite has a period of 12 hours. What is its altitude? Express the period in lunar sidereal months τ = 0.5/27.322 = 0.018300 months. Then the semi-major axis from τ 2 = a3 is a = 0.069445 L.U. and since 1 L.U. = 384748 km, the radius of the gps satellite is 26718 km and the altitude above the surface of the earth is 20340 km. E.g. 39P Oterma Comet Oterma has a semi-major axis of 7.228 A.U. and an eccentricity of 0.2434. Find the aphelion and perihlion distances, the period, the angular momentum per unit mass, and the speed at perihelion. 7.2 Is Universal Gravitation Universal? Dark Matter For 150 years from the time of Newton’s statement of the Universal Law of Gravity it ruled supreme—not withstanding the extremes of General Relativity. The Law was used to discover of Neptune and Pluto, and to predict the motion of objects in the solar system and beyond. In 1934 Fritz Zwicky noticed a problem. The text deals with it in some detail, but the idea is this. Many galaxies have a central core and surrounding arms of low density. If we use Gauss’s Law for gravity we can determine the gravitational field inside and outside the core. Then using Newton’s second law we can determine the speed of stars at different distances from the center of the core. Inside the core the speed should vary as v ∼ r while outside the speed should vary as v ∼ r−1/2 . Figure 6.6.1 shows the measured galactic rotation curve that varies dramatically from the Keplerian/Newtonian curve. To account for the variation Zwicky posited dark matter filling up much of the space around the galactic core. Dark matter is now assumed to be 80% of the mass of the universe. What it is, and what dark energy is is an active research area in Astrophysics. 8 Potential Energy, Potential, Field It is easy to show that gravity is a conservative force, therefore we can define a potential energy, V , for it. Consider motion from point A to point B as shown in Figure 3. For 9 conservative forces, work is independent of path, so rather than the general curve, evaluate work along the dashed line, ACB. Along the arc, AC, no work is done since the force is perpendicular to the path (êr · êθ = 0) Along the radial portion, CB, the work is Figure 3: Motion in a gravitational filed. Since the force is conservative, the work done by gravity while the object moves from A to B does not depend on path. Rather than the solid arbitrary path, use the dashed path to evaluate the work. Z r2 W = −(V2 − V1 ) = r1 −GM m êr ) · (drêr ) = −GM m ( r2 Z r2 r1 dr = GM m r2 1 1 − r2 r1 (27) NOTE: The text computes the work done by a force required to overcome gravity, and so has the opposite sign. For convenience we choose V = 0 at r = ∞, leaving us with an expression for the potential energy, GM m V (r) = − (28) r We have already mentioned gravitational field, ~g defined so that if a mass m is at a particular location where the field is ~g , then the gravitational force on the mass is F~ (r) = m~g (r) (29) GM êr . If there are several point For a single mass M the gravitational field is ~g (r) = − r masses acting on m, we must do a vector sum and the unit vectors êr are all different. We can also define a gravitational potential, Φ, so that for a mass m the gravitational potential energy is V (r) = mΦ(r) (30) For a point mass, Φ(r) = − GM r 10 Finding the potential form several point masses is simply a scalar sum of the individual potentials, an easier task than adding vectors. Once we have Φ(~r) we can get the gravitational field and force using a gradiant, F~ (~r) = −∇V (~r) ~g (~r) = −∇Φ(~r) (31) Example 6.7.1 Find the gravitational potential for a uniform spherical shell (i) outside and (ii) inside the shell. Show that this gives the expected fields at these locations. Example 6.7.2 Find the gravitational potential and field for a uniform ring of radius R in the plane of the ring and (i) outside and (ii) inside the ring. Evaluate for the far field (r R), approximating and keeping two non-zero terms. Evaluate near the center (r ≈ 0) and show that a mass near the center is repelled from the center. 9 Energy Equation for Central Forces Earlier we determined the equation of motion (Newton’s Second Law) for central forces: mr̈ − m`2 = f (r) r3 d2 u f (1/u) +u=− dθ2 mu2 `2 (32) Since the gravitational force is conservative, T + V = E = constant. We compute the kinetic energy in polar coordinates, 1 1 T = m~v · ~v = m(ṙ2 + r2 θ̇2 ) 2 2 (33) Hence we can write the energy equations of motion for a general central force as 1 m(ṙ2 + r2 θ̇2 ) + V (r) = E = constant 2 (34) or in terms of u = 1/r, 1 2 m` 2 9.1 " du dθ 2 # + u2 + V (1/u) = E (35) Energy Equation of Motion for Gravity Using k = GM m and K = GM , we can write the potential energy as V =− k = −ku r Φ=− 11 K = −Ku r (36) The text shows how the energy equation of motion can be solved to show that the motion is a conic section. Since we have already shown this, I will instead determine an expression for the eccentricity in terms of the energy. We know that r= α 1 + cos θ At θ = 0, Then r = r0 = α= `2 K α `2 = 1+ K(1 + ) ` = v0 r0 1 `2 Km 1 Km = m 2− E = mv02 − 2 r0 2 r0 r0 (37) Putting in the expression for r0 and rearranging we get 2E`2 = (1 + )2 − 2(1 + ) = −1 + 2 mK 2 and r = 1+ 2E`2 mK 2 (38) (39) Using α = (1 − 2 )a we can write the total energy, kinetic plus potential, as E=− Km 2a (40) We can use the energy to determine the type of conic section. E < 0, < 1 ellipse a>0 E = 0, = 1 parabola a = 0 E > 0, > 1 hyperbola a < 0 E.g. 1 A projectile is launched from a location a distance r0 from a planet of mass M . Find the required initial speed so that the projectile escapes the planet. In order to escape, the orbit must either be a parabola or an hyperbola, E ≥ 0. Hence 1 Km mv02 − ≥0 (41) 2 r0 which is easily solved to give a result that is independent of the projectile mass r 2K v0 ≥ (42) r0 12 In real planetary systems perturbations from other planets will modify this: a projectile launched with a speed less than escape velocity and interact with other planets in a “gravitational slingshot” process and then escape. This is commonly used by NASA in planetary probe missions. http://en.wikipedia.org/wiki/Gravity_assist 9.2 Units again Earlier we discussed measuring planetary motion about the sun by measuring time in years, and distance in A.U. Doing this is defining time and distance in dimensionless units, T = t/1 year, R = r/1 A.U. Then from Eq. 26, K = GM = 4π 2 , and τ 2 = a3 . In these units the speed of the earth (assumed circular orbit) is 2πae = 2π A.U./yr τe (43) K = GM = ae ve2 = 4π 2 (44) ve = We also recognize that Now define a dimensionless quantities for velocity, V , and distance, R. V = v ve R= r ae (45) This lets us simplify the expression for eccentricity Suppose that a planet/comet is located at a radius R from the sun with velocity V making an angle φ with the radius (see Figure 6.10.1), then ` = rv sin φ = (RV sin φ)ae ve = 2πRV sin φ (46) The energy per unit mass is E/m = (1/2)v 2 − K/r. We can write the eccentricity 2 2E`2 Kae RV ae re sin φ 2 2 2 = 1+ = 1 + V ve − mK 2 R K 2 (RV sin φ)2 = 1+ V2− R (47) (48) Likewise we can express the energy, Eq. 40, in terms of the dimensionless units. Since E = mv 2 /2 − mK/r, a= Km ae ve2 ae 1 = = = 2 2 2 −2E (2ae ve /r) − v (2ae /r) − (v/ve ) (2/R) − V 2 13 (49) E.g. 2 You observe comet 103P Hartley (see Figure 4) at a distance 2.07 A.U. from the sun, with a speed 0.816 of the earth’s speed and the angle between the radius vector and the velocity vector is 52.1◦ . Find (a) The eccentricity. (b) The semi major axis, semi-minor axis, the perihelion and aphelion distances. (c) The angular momentum per unit mass of the comet. (d) The speeds of the comet at perihelion and aphelion. (e) The period of the comet. Figure 4: The orbit of Comet 103P Hartley, expected perhelion Oct 28, 2010. The square is the sun, the circle is the orbit of the earth. Shown with axes at the center of the ellipse, units of A.U. (a) R = 2.07 V = 0.816 so using Equation 48, the eccentricity is = 0.683 √ (b) From Eq. 49, a = 3.33 A.U. We know b = 1 − 2 a = 2.43 A.U., α = (1−2 )a = 14 1.777 A.U., and then we can use r = α/(1 + cos θ) to get r0 = 1.06, r1 = 5.61 A.U. (c) Use ` = 2πRV sin φ = 8.37 A.U.2 /yr (d) At aphelion and perihelion, sin φ = 1, so from ` = 2πRV we get VP = 1.26 and VA = 0.237. (e) Finally, using τ 2 = a3 we get τ = 6.08 yr. Hohmann Transfer Using Energy Arguments, E.g. 6.10.2 A spacecraft is in a circular low-earth orbit. Some energy is added to take it to an elliptical orbit with apogee at the orbit of gps satellites. Finally additional energy is added to take it into a circular gps orbit with period of 12 hours. What is the required velocity boost at each of the two burns, and what are the corresponding energy per unit mass boosts? 10 Effective Potential: Limits of the Radial Motion The general energy equation for a central potential energy V (r) is 1 m(ṙ2 + r2 θ̇2 ) + V (r) = E = constant 2 (50) but we also know that the angular momentum is a constant of the motion, ` = r2 θ̇ = constant so the energy equation can we written m 2 `2 ṙ + 2 + V (r) = E = constant (51) 2 r It is convenient and common to write an effective potential energy (often called just the effective potential not to be confused with Φ) that is the sum of a centrifugal potential energy, m`2 /(2r2 ) and the real potential energy V , U (r) = m`2 + V (r) 2r2 (52) The energy equation of motion then looks like a one-dimensional differential equation, m 2 ṙ + U (r) = E 2 (53) An energy plot, U (r) versus r can be drawn, and the turning points are the intersection of this curve with a horizontal line at energy E, Figure 5 for the gravitational case. 15 Applying this to the inverse square gravitational field, V (r) = −k/r, the turning points occur for ṙ = 0, U (r) = E, and this can be written −2Er2 − 2kr + m`2 = 0 (54) with solutions, the turning points, at √ k 2 + 2Em`2 (55) −2E Note that if E < 0, there are two positive real turning points, as expected for an ellipse. r1,0 = k± Figure 5: Effective Potential for Gravitational Force, units are arbitrary. The gravitational and centrifugal components are shown, and add to the efective potential. Horizontal lines for two negative energies are shown: one has two turning points, the other is the lowest energy circular orbit. The circular orbit occurs when k 2 + 2Em`2 = 0. For E = 0 there is one positive turning point and the other root is ∞. This is the parabola. Finally, if E > 0 there is one positve real root, and one negative, meaningless, root, and we have an hyperbola. You will see effective potentials again in quantum mechanics of the hydrogen atom. 11 Stabilty Analysis of Nearly Circular Orbits A circular orbit is possible for any attractive central force, V (r) < 0. A circle implies ṙ = 0, so the energy equation becomes m`2 /(2r2 ) + V (r) = E Given r = a we can then find the required angular momentum per unit mass and speed. 16 For attractive central forces the vector component f (r) < 0. At a circular orbit with r̈ = 0 (no radial acceleration) the radial equation of motion is 0= m`2 + f (a) a3 (56) So circular orbits of radius a are an equilibrium state, but is that equilibrium stable? That is, if we disturb the satellite by a small amount x so that the radius is r = a + x, will the satellite feel a restoring force towards the circular orbit, or a repulsive force? The equation of motion mr̈ = m`2 /r3 + f (r) becomes mẍ = m`2 [a + x]−3 + f (a + x) m`2 h x i−3 = 1 + + f (a + x) a3 a (57) (58) Expanding the two expressions in a Taylor series about x = a, keeping first order terms, m`2 a3 m`2 = 3 ha mẍ = = i x 1 − 3 + · · · + [f (a) + f 0 (a)x + · · · ] a h xi −3 + [f 0 (a)x] a i x f (a)3 + f 0 (a)x a h (59) (60) (61) We can write this as mẍ + Ax = 0 (62) where 3f (a) − f 0 (a) (63) a If A > 0, the solution to the differential equation is oscillatory, and the circular orbit is stable if small disturbances are made. If A < 0 the solution is a combination of exponentials and the circular motion is unstable. If A = 0 we must use higher order terms in the Taylor expansion to determine the stability. A=− So circular orbits are stable providing a f (a) + f 0 (a) < 0 3 (64) E.g. Power law central force Suppose that f (r) = −crn . For what values of n are circular orbits stable? We have f 0 (r) = −ncrn−1 , so the criterion for stability is a −can − cnan−1 < 0 3 17 (65) and this reduces to n > −3 (66) So inverse square (n = −2) and the isotropic oscillator (n = +1) both allow stable circular orbits. If n = −4 the circular orbit is unstable, and if n = −3 more analysis must be done (it turns out to be unstable.) 12 Apses, Apsidal Angles, and Orbital Precession The points where the radius reaches an extreme value (maximum or minimum) is called an apsis or apse. Perihelion and aphelion points are examples of apses (the plural of apsis). The angle between two successive apses is called the apsidal angle, and we will determine this angle for the nearly circular orbit discussed in the last section. The period of the oscillatory motion discussed in the last section is s r m m τr = 2π = 2π 3f (a) A − a − f 0 (a) (67) The time to move from the minimum to the maximum radius about the circle r = a is τr /2, and we want to know by how much the polar angle θ increases in this time. Since our orbit is nearly circular we can approximate r ` ` f (a) θ̇ = 2 ≈ 2 = − (68) r a ma Hence the apsidal angle in this case is 1 π Ψ = τr θ̇ = p 2 3 + af 0 (a)/f (a) (69) E.g. Apsidal Angle for power law force Using f (r) = −arn we find that the apsidal angle is π Ψ= √ (70) 3+n This is independent of the radius of the orbit. For an inverse square law, Ψ = π and for an isotropic oscillator Ψ = π/2, and both of these are termed reentrant since the orbit just repeats itself without any precession. Other powers lead to non-reentrant orbits. If n = −1.9, Ψ = 0.953π = 172◦ , so the apses precess in a direction opposite the orbit. 18 E.g. 6.13.1 Precession of Mercury Recall that near the center of a ring of mass, F~ = rêr , a repulsive force. (The text uses > 0 but it is NOT the eccentricity.) As a first approximation let us describe the net gravitational force on Mercury as a linear combination of the attractive force of the sun and the small repulsive force due to the exterior planets, treated as rings of mass. Thus f (r) = − k + r r2 (71) It is easy to then get the apsidal angle −1/2 2ka−3 + Ψ = π 3+a −ka−2 + a 1/2 1 − k −1 a3 = π 1 − 4k −1 a3 (72) (73) Now expand the numerator and denominator separately as Taylor series, multiply them out and keep terms to first order in a3 /k to get 3 3 Ψ≈π 1+ a (74) 2k With > 0 this means that the apses precess in the same direction as the orbit. In fact Urbain Leverrier in 1877 had done a much more detailed and correct analysis and found that the known planets would produce an effect leading to the precession of the perihelion of Mercury being 52700 of arc per century while the observed precession was 56500 of arc per century4 . Two solutions were proposed: An undiscovered planet named Vulcan orbited at about half the radius of Mercury (Vulcan never found), or the inverse square law was not quite accurate and should be (2 + 1.612 × 10−7 ). A third alternative, an oblate (football-shape) sun, could also cause this precession, however no oblateness has been seen. We now know that the discrepancy is due to the onset of general relativistic effects, as shown by Einstein, and alternate explanations have been abandoned. 13 Rutherford Scattering Between 1909 and 1914 Ernest Rutherford and his graduate students Hans Geiger and Ernst Marsten did a series of experiments to determine the distribution of charge in an 4 By 1900 the numbers had been improved to a predicted 53400 and measured 57500 of arc per century. 19 atom. The electron had been discovered in 1899, a “particle” having little mass and a negative charge. Atoms are neutral, so there must be positive charge in the atom, and associated with the positive charge is most of the mass of the atom. At the time J. J. Thompson’s model of the nucleus was a “plum-pudding” model of a homogeneous sphere of uniformly distributed mass and positive charge in which the negative electrons were embedded, like raisins in a plum pudding5 . Rutherford and his students set out to probe the distribution of mass and charge by sending massive alpha particles at thin foils of metal. A foil was used to reduce the number of multiple collisions, one alpha with several nuclei. They expected small deviations, based on Thompson’s model but instead, in Rutherford’s words, “It was quite the most incredible event that has ever happened to me in my life. It was almost as incredible as if you fired a 15-inch shell at a piece of tissue paper and it came back and hit you.” I will sketch the basic set-up on the board. We send N particles at the foil that has n atoms per unit area in the foil. We can measure the number of particles, dN , scattered between angles θs and θs + dθs and write this in terms of a differential scattering cross section σ(θs ) and an infinitesimal solid angle dΩ, dN = nσ(θs )dΩ N (75) The differential cross-section has units of area, with the area of 10−28 m2 being called a barn (b). The area of a uranium nucleus is approximately 1 b. A shed is 10−24 b = 10−52 m2 . Solid angle, Ω, is defined in an analogous manner as an angle in radians. θ(radians) = s/R Ω(steradians) = Area/R2 (76) (77) The solid angle for a complete sphere is thus 4π, and this is the solid angle for any closed surface. The differential solid angle, dΩ, that the particles are scattered into is the area of an annulus (radius R sin θs and width R dθs ) divided by R2 , or dΩ = 2π sin θs dθs (78) 5 From Wikipedia’s Plum Pudding article, “Christmas pudding is a steamed pudding, heavy with dried fruit and nuts, and usually made with suet. It is very dark in appearance — effectively black — as a result of the dark sugars and black treacle in most recipes, and its long cooking time. The mixture can be moistened with the juice of citrus fruits, brandy and other alcohol (some recipes call for dark beers such as mild, stout or porter).” 20 so dN = nσ(θs )2π sin θs dθs (79) N The differential cross section is the fraction of incident particle scattered into a particular solid angle per scattering site. Rutherford and his students measured the cross section. We will derive the theoretical cross section assuming a nuclear model of the atom with the mass concentrated in a small region at the center of the atom. We shall ignore the light negative electrons and just consider scattering a positive particle (an α-particle) from a very heavy positive nucleus, so heavy that we will consider it to be fixed. Begin with the repulsive Coulomb force, f (r) = kqQ r2 (80) The text uses cgs units (charge in esu, distance in cm, and force in dynes) and k =1. We can use SI units (coulombs, m, N) with k = 9 × 109 N m2 /C2 . The energy is kqQ 1 >0 E = mv 2 + 2 r so the trajectories are hyperbolas. The solutions to the differential equation 17 (81) d2 u f +u=− 2 2 dθ2 m` u then becomes (compare to Equation 21) r= −kQq/m`2 1 m`2 /(kQq) = 2 + A cos(θ − θ0 ) −1 + m` A/(kQq) cos(θ − θ0 ) (82) or for the energy solution (compare to text Eq. 6.10.7c) r= m`2 /kQq q 2 −1 + 1 + k2Em` cos(θ − θ0 ) 2 Q2 q 2 (83) A and θ0 , or E and θ0 are determined from initial conditions. The incoming particle is closest to the scattering atom at θ0 . Unlike the gravitational case we do not make θ0 = 0. Instead we imagine the incoming particles are moving along the x-axis as shown in Figure 6. On that diagram we define incident and scattering angles θ0 and θs and it is easily seen that θs = π − 2θ0 21 (84) Figure 6: Rutherford Scattering parameters. Incoming particles start at r = ∞ and θ = 0. This means that the denominator of Equation 83 must be zero. Square and rearrange to get 2Em`2 (85) 1 + 2 2 2 cos2 θ0 = 1 k Q q This can be rearranged to give √ ` kQq (86) θs √ ` = 2Em 2 kQq (87) tan θ0 = 2Em From Equation 84 we rewrite this cot Next we introduce the impact parameter b. Incoming particles that enter through an annulus of radii b and b + db scatter between θs and θs + dθs (logically dθs < 0) . Using ` = bv0 and the total energy E = mv02 /2, cot θs 2bE = 2 kQq (88) b= kQq cot θ2s 2E (89) or Take the derivative to get kQq db =− dθ 4E sin2 θs /2 22 (90) Logically we can look at the incoming side and see dN = (2πbdb)n = nσ(θs )2π sin θs dθs N where the last expression is from Equation 79. Rearrange to get b db σ(θs ) = sin θs dθs (91) (92) Now use Equations 89 and 90 in 92, and the trig identity sin θs = 2 sin θ2s cos θ2s to yield 1 Q2 q 2 (93) σ(θs ) = 4 2 16E sin θs /2 This is the formula that Rutherford derived and was able to fit to the data (I’ll show you an example). In addition to showing that a nuclear model of the atom is the appropriate one, Rutherford scattering is used an analysis tool. A beam of alpha particles is sent into a sample, and scattering at an angle very close to 180◦ , “backscattering”, is measured. In University Physics you discussed one-dimensional elastic scattering of a particle from a stationary target and found the rebounding velocity in terms of the incident velocity, v10 = m2 − m1 v1 m2 + m1 This leads to a relation between the scattered alpha energy (mass 4) and the incident energy, m2 − m1 2 M −4 2 0 Eα = Eα = Eα (94) m2 + m1 M +4 Consider a sample that consists of a silicon substrate with a thin film of TaSi. We would like to know how thick the film is, and what the elemental composition of the film is. Sample data are shown in Figure 7. Thus for incident energy of 2.2 MeV, alphas scattered from Tantalum should have energy 2.01 MeV, and those scattered from silicon should have energy 1.26 MeV. The edges of the two features in the figure are at these energies. As the alphas penetrate the sample, they will lose energy primarily in interactions with electrons, so the data in Fig 7 shows alphas with less energy than that predicted by elastic collisions. 23 Figure 7: Rutherford Backscattering (RBS) from two different samples of a TaSi alloy film on top of a Si substrate. Incident energy is about 2.2 MeV. Composition as a function of depth can be extracted from this data. The Ta peaks are simpler to understand. Sample 1 shows a tall narrow feature for Ta, indicating that the Ta is spread over a narrower depth in Sample 1 than in Sample 2. The maximum count is higher for Sample 1, so there must be more Ta at the surface. Looking at the Si features confirm this, the Si signal near the surface is smaller for Sample 1 meaning less Si. Near the surface the alphas can scatter either from the Ta or the Si. Once through the film, the alphas only scatter from the Si, so once the thin film layer is passed, the Si signal becomes larger, and is the same for both samples. Full analysis programs allow us to extract the composition as a function of depth, and to get the depth in nm. RBS can ample to a depth of about 1 µm. For more, http: //www.eaglabs.com/training/tutorials/rbs_theory_tutorial/ 24