Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Tree-based Data Structures for Triangle Mesh
Connectivity Encoding
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
Max-Planck-Institut für Informatik,
Stuhlsatzenhausweg 85, Saarbrücken, 66123, GERMANY
{ivrissim,roessl,hpseidel}@mpi-sb.mpg.de
1 Introduction
Triangle meshes have recently emerged as the de facto standard in many
Computer Graphics applications, generating a research interest in finding
data structures able to represent them efficiently. This is not a trivial task
given that the size of a typical meshes can vary from few hundreds triangles,
up to hundreds of millions of triangles for some very detailed models.
A typical data set describing a 3D triangle mesh model consists of connectivity, geometry and some external attributes. The connectivity describes the
way the vertices of the mesh are connected with edges and faces. It captures
intrinsic topological properties of the mesh, containing all the information
related to the genus and the existence and size of boundaries. The geometry
of the mesh describes the actual positions of the vertices in the 3-dimensional
Euclidean space R3 . Finally, there are the other attributes of the mesh, like
color or normals. In this paper we deal with the encoding of connectivity.
The choice of the most suitable data structure for connectivity encoding usually depends on the characteristics of the application. If the mesh is
going to be manipulated heavily, then the focus is on the efficient traversal
and access of the vertices, edges and triangles. Therefore, the most suitable
data structures, like for example the winged-edge data structure, have a lot
of redundant information. For rendering purposes more compact representations are preferred. The usual choice is a simple shared vertex representation
encoding triangles as triplets of indices into a vertex table. The ply-format,
supported also by the Stanford 3D Scanning Repository, is a well known example of such a representation. For storage and efficient transmission of the
mesh over low-bandwidth networks as the Internet the focus is on the further
compression of the data.
In this paper we propose a novel data structure for encoding triangle mesh
connectivity, consisting of a binary tree with positive integers attached on its
nodes. It is simple enough so that it can be implemented easily, and compact
enough so that it can be used for compression purposes. It arises naturally
from a Divide and Conquer Algorithm which we will describe in detail. Notice
that in the compression literature the focus is almost solely on the algorithms
172
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
themselves, and some of the most widely used methods do not use any data
structure other than a stream of symbols.
The main advantage of introducing and studying this data structure is
that we can find a simple criterion for deciding whether a member of the
data structures represents a valid mesh or not. This criterion can be used
directly to check the validity of a code without going into the reconstruction
of the mesh, or indirectly for enhancing the compression ratio. Criteria of this
kind are rather rare in the literature, because if the encoding is very compact
usually the corresponding algorithm is very involved, while otherwise it is
very difficult to deal with the redundant information.
1.1 Overview
In Section 2 we give some basic standard terminology. In Section 3 we give a
brief overview of the existing encoding techniques. In Section 4 we describe
in detail the Divide and Conquer Algorithm, mainly following [12]. Finally,
in Section 5 we study the data structure acquired by the Divide and Conquer
Algorithm, showing that we can achieve very good compression ratios and also
obtain an interesting new insight into the complex mathematics of triangle
meshes.
2 Terminology
Some basic terminology we use throughout the paper.
The Rooted Triangle Mesh is a triangle mesh, with one directed edge on
the boundary marked. The marked edge is called the gate. If the mesh has no
boundary we create one by removing one triangle. Usually we will refer to the
rooted triangle meshes simply as meshes, and we will make the distinction
between rooted and unrooted meshes only when it is necessary. Also, notice
that the same distinction can be carried over to the trees. A tree is defined
as an acyclic graph and the rooted tree as a tree with one node, the root,
marked. Again, it is customary to refer to the rooted trees simply as trees if
there is no room for confusion.
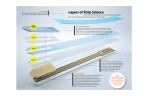
A zig-zag strip of length n is a mesh with n + 2 vertices (v0 , v1 , . . . , vn+1 )
and n triangles vi vi+1 vi+2 with 0 ≤ i ≤ n − 1 (cf. Fig. 1). In the rooted zigv1
v0
v3
v2
v5
v4
v9
v7
v6
v8
v11
v10
v13
v12
Fig. 1. A zig-zag strip of length 12. The gate is marked with a solid thick arrow,
the left leading directed edge is dashed, the right is dotted, and the leading vertex
is marked by a black dot.
Tree-based Data Structures
173
zag strips we use here the gate will always be the directed edge (v0 , v1 ). The
vertex vn+1 will be called the leading vertex and the triangle vn−1 vn vn+1 the
leading triangle. Assuming that all the triangles have the same orientation, as
indicated by the gate, the oriented leading triangle is (vn−1 , vn , vn+1 ) for odd
n and (vn , vn−1 , vn+1 ) for even n. For odd n, (vn , vn+1 ) and (vn+1 , vn−1 ) are
the left and the right directed leading edges, respectively. For even n the left
and right leading directed edges are (vn−1 , vn+1 ) and (vn+1 , vn ), respectively.
In both cases the left leading directed edge is the one pointing at the leading
vertex.
3 Overview of Mesh Encoding Algorithms
In the last years the increasing popularity of triangle meshes has rapidly accelerated the pace of research in the area of mesh encoding. As a result, many
diverse techniques have emerged for the encoding of triangle mesh connectivity, each one with some advantages over all the others when a particular
class of meshes is considered. Some of the earlier techniques include the encoding of the connectivity as a permutation of the vertices [5], the topological
surgery method [21], where a mesh is encoded as a vertex tree together with
the dual face tree, and the pioneering Cut Border Machine [10], [8], which
was the first recursive method based on a traversal of the triangles of the
mesh.
More recently two major branches of encoding techniques have started
to emerge. The valence driven techniques, where the algorithm traverses the
vertices of the mesh, and the EdgeBreaker like methods, where the algorithm
traverses the faces of the mesh. In the valence driven methods, each vertex
transmits its valence together with some special symbols. The method was initiated by Touma-Gotsman in [22], with a non-adaptive traversal of the mesh
vertices, while Alliez-Desbrun used an adaptive traversal of the vertices [1],
reporting the best compression ratios in practice. Alliez and Desbrun’s algorithm has been expanded to more complex problems such as the progressive
transmission of a 3D model including the geometry [2], or the encoding of
polygonal meshes [14], giving again the best reported results when compared
with any other similar method.
The other major branch of recently developed techniques is based on the
EdgeBreaker algorithm. The original EdgeBreaker was proposed in [19]. It
traverses a tree of the faces of a mesh and for each face returns one symbol
from an alphabet of five, determining the adjacencies of that face with the
not yet conquered part of the mesh. Its main advantage over the valence
driven methods is the existence of a sharp guaranteed worst-case bound,
which originally was reported at 4 bits per vertex, and later was improved
to 3.67 bits per vertex [15], and to 3.55 bits per vertex [9]. Numerous other
improvements in the efficiency of the technique followed. For example, [18]
make the encoding and decoding process linear in time, [11] simplify further
174
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
the decoding algorithm especially for meshes of arbitrary topology, while [20]
is an adaptation of the EdgeBreaker for highly regular meshes. The Divide
and Conquer algorithm we study here traverses the faces of the mesh and
can be classified into the family of the EdgeBreaker like schemes.
At a more theoretical level, we notice that some of the mathematical
foundations of the triangle mesh connectivity encoding were laid much earlier,
in 1962, with the results of Tutte [23] on the enumeration of the planar rooted
triangulations. Tutte found generating functions for the number of distinct
rooted triangulations over a plane, and studied their asymptotic behavior. His
results established a theoretical upper bound of 3.24 bits per vertex for the
encoding of sufficiently large triangle meshes. In [4], Tutte’s initial condition
that two boundary vertices cannot be connected with a non-boundary edge
is removed and it is proven that the generating functions have the same
asymptotic behavior.
Finally, in [6], a method employing an approach very similar to ours was
reported for graph compression. There, a graph is decimated with the use of
graph separators, that is, subgraphs whose removal separates the graph into
components of roughly similar size, and in a recursive process they encode
these components in a tree data structure. The different setting, especially
the nature of the graph as a combinatorial rather than a geometric object,
makes much more difficult conclusive answers, something that, as we see in
this paper, is not the case with triangle meshes.
4 The Divide and Conquer Algorithm
In this section we describe in detail the Divide and Conquer algorithm. The
algorithm was introduced in [12] where some additional details can be found.
We first describe the algorithm for planar meshes, then we study some basic
characteristics of its behavior, and show the necessary modifications for the
handling of arbitrary topology. We conclude the section with a brief discussion
of the internal similarities between our algorithm and the EdgeBreaker.
4.1 The Divide and Conquer Algorithm for Planar Meshes
In the beginning of the encoding process we mark the boundary vertices of the
mesh as conquered. We randomly choose a directed edge on the boundary of
the mesh as the initial gate and we build a zig-zag strip conquering its vertices.
We stop when we arrive at an already conquered vertex. The latter happens
when the leading vertex of the zig-zag strip reaches either the boundary
of the mesh or another vertex of the strip. In both cases the original rooted
mesh splits into two rooted submeshes: The left submesh with the left leading
directed edge of the strip as gate, and the right submesh with the right leading
edge of the strip as gate. Any of these submeshes or both can be empty. We
continue recursively, encoding separately the two submeshes and the encoding
Tree-based Data Structures
175
process terminates when all the submeshes are empty. A typical situation is
shown in Fig. 2. We organize the data acquired in this process in the form
Fig. 2. A triangle strip divides each mesh into two submeshes (left). The left and
the right submeshes are processed the same way recursively defining a binary tree.
The result is shown on the right side, the black lines denote the strip connectivity.
We can encode a planar triangle mesh as the resulting binary tree with only the
strip lengths stored in its nodes.
of a binary tree with the strip lengths stored in its nodes. The length of the
initial zig-zag strip is stored in the root of the tree, the encoding of the left
submesh is the left branch of the tree, and the encoding of the right submesh
is the right branch of the tree.
Encoding a triangle mesh can be written in pseudo code as:
tree = encode(edge) {
node.length=0;
while (!conquered(oppositeVertex(edge)) { // GROW
conquer(oppositeVertex(edge),triangle(edge));
edge=nextStripEdge(edge);
++node.length;
}
if (node.length==0)
return NULL;
// STOP
node.left =encode(leftLeading(edge));
// RECURSION
node.right=encode(rightLeading(edge));
return node;
}
The encoding starts with the enter gate as argument to encode(), e.g.
(v0 , v1 ) in Fig. 1. oppositeVertex() returns the “leading” vertex opposite of
the edge in the same triangle, e.g. v2 ∈ 4(v0 , v1 , v2 ). nextStripEdge() finds
the next edge in the next triangle of the strip, e.g. (v2 , v1 ) ∈ 4(v2 , v1 , v3 ), and
leftLeading()/rightLeading() return the adjacent edges in the same triangle,
e.g. (v1 , v2 ), (v2 , v0 ). Navigation in the mesh can be reduced to several calls
to next(edge,orientation) and neighbor(edge) operations returning the next
edge and the neighboring directed edge in the adjacent triangle.
Conversely, in one recursive step of the decoding process we have a zig-zag
strip of specified length and two rooted meshes, and we glue them together.
We identify the gate of the left rooted mesh with the left leading edge of the
strip, and we glue the left boundary of the strip with the boundary of the
176
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
mesh stopping at the gate of the strip. Then we repeat the same for the right
rooted mesh and the right boundary of the strip. The gate of the new mesh
is the gate of the strip.
Assume that the tree encoding the mesh is traversed in preorder. Then
the recursive decoding can be sketched as follows:
decode() {
length=getNextNode();
// READ, preorder traversal
if (length>0) {
// else: leaf, STOP
[ enter,leading[2] ]=createStrip(length);
enterSub[0]=decode(); // RECURSION
enterSub[1]=decode();
for (i=0;i<2;++i)
// GLUING
if (enterSub[i]!=EMPTY)
glue(leading[i],enterSub[i]);
return enter;
}
return EMPTY;
}
Here, getNextNode() returns the values of the tree nodes, createStrip()
creates a triangle strip and returns its enter gate/edge, e.g. (v0 , v1 ), in Fig. 1,
and the two leading[] edges, e.g. (v11 , v13 ), (v13 , v12 ). The recursive call to
decode() creates the two submeshes and returns their enter gates. Finally,
the strip boundaries are glued to the submeshes. The number of boundary
edges for glue() can easily be calculated from the strip’s length and parity,
e.g. 6 and 7 for the strip of length 12. Note that some modification is needed
to handle the self intersection, valence 3 and non-planar topology cases.
E.g. in Fig. 2 (left) we glue starting from the leading edges (top right in
the picture) first the blue and then the green submesh to the dividing strip
(red). In both cases gluing stops at the gate of the strip (bottom left). Fig. 3
shows an example run of the algorithm for a simple mesh.
Note that a strip may intersect not only with the boundary of a submesh
but also with itself resulting in a loop (cf. Fig. 4, left). This is the same situation as before but with an inner and an outer submesh. The leading vertex
now induces some kind of singularity for gluing: When we start gluing from
the inner leading edge (red-blue border) we cannot decide which direction to
take once we arrive back at the leading vertex as the outer boundary has not
been glued yet. This problem can be resolved by gluing both leading edges
first (glueSingleEdges(leading[1],enterSub[1]) removes the singularity) before gluing along the whole strip (glue(leading[0],enterSub[0])).
Another fine point of the algorithm is the occurrence of empty submeshes.
A strip of length 1, that is a single triangle, can have one or both submeshes
empty if one or both leading edges are boundary edges of the mesh. A strip of
length 2 can only have the left submesh empty because the non-gate vertex
of the first triangle of the strip is not boundary. Otherwise the process of
growing the strip would stop there. In a strip of length greater than 2 both
the leading directed edges are not boundary and an empty submesh occurs
only when the strip intersects itself and the internal submesh is empty. This
happens precisely when the strip passes through a vertex of valence 3. The
Tree-based Data Structures
!!! "!"!!
"!"!"! "!"!"! "
!""!"
"!"! "
"
2
2
.-.-.- .-.-.- .-.-.- .-.-.- .-.-..-.- .- .- . 1
1
%$#$
%#$
#$
&
#&#
#&#%$
##$
# $
# $#$#$#$#
%$# &$
$
$
&% %% $
&%
&&
2
211 0/0/0/ 211 0/0/0/ 0/0/0/ 0/0/0/
21 0/ 21 0/ 0/ 0/
21 21
22
1
')
)
) +) ++ ,++
(*)'))' *
(*)'))' *
)
' *
*)) +****))) ,
()' *
()' *
,+ ,+
)
*
'*
('' *
(' *) +
,,
(( +,+ ,+
2
2
1
1
3
3
3
3
3
34334334
433
4
55 3
6
334
3
4644 6565 4
444
55 655 444
6
66
1
1
1
177
2
1
1
1
1
1
1
2
7
7 7
78
8778877
7
8787 887
1
99 :99
9
:
9
:
9
9:9
:
9:9 ::9
2
1
Fig. 3. Example run of the algorithm. Top row : The mesh (top left) is recursively
encoded as a binary tree (top right) starting from the gate shown by the arrow.
The four resulting strips are filled with different patterns. The first strip of length
2 partitions the mesh into two submeshes, all other strips have one or two empty
submeshes. The dot denotes the leading vertex of the current strip, i.e. the point
where the strip touches a conquered/boundary vertex. For every new strip the
corresponding tree state is shown with the new node highlighted. Bottom row : For
decoding, the tree is traversed in preorder. The strips are created during the topdown traversal of the tree nodes, and submeshes are glued (thick line) when an
edge of the tree is followed in bottom-up direction. In the figure the corresponding
tree nodes and edges are shown below the state of the mesh.
Fig. 4. Left: A strip may intersect itself resulting in a loop. Right: Handles or
holes prevent the strip from splitting the mesh into two parts. A special split code
is output instead of the empty left submesh. It references the corresponding edge
in the right submesh drawn black. With this information the remaining boundary
(white) can be glued.
178
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
1
1
1
2
3
2
1
Fig. 5. From left to right. All strips are entered through the dashed gate (bottom
line). The first strip of length 1 has both submeshes empty, while the next strip of
length 1 has only the right submesh empty (solid gate). The strip of length 2 has
the left submesh empty (dotted gate). The strip of length 3 has the right submesh
empty (solid gate). Notice that in the case of a strip with length greater than 2 the
empty submesh is in the interior of the strip and not on the boundary (valence 3
case).
parity of the length of the strip determines if the right or the left mesh is
empty (cf. Fig. 5).
This case has to be checked separately, as the empty submesh does
not correspond to boundary. If the strip length>2 and the submesh k
is empty (enterSub[k]==EMPTY) then an extra glue operation is needed:
glue(stripEdge,enterSub[k]), where stripEdge is the corresponding edge of
the strip (cf. triangle 1 in Fig. 5, right) which can be referenced easily by a
fixed navigation path back through the strip.
4.2 Analysis of the Divide and Conquer Algorithm
Next, we give two basic propositions concerning the behavior of the Divide
and Conquer Algorithm. The first proposition is about the size of the obtained the binary tree, and the second describes the relationship between the
structure of the tree and the strip length information stored in its nodes.
The number of vertices of the mesh will be denoted by v, the number of
triangles of the mesh, which is equal to the sum of the strip lengths, will be
denoted by t, and the number of the strips, which is equal to the number of
the nodes of the tree, will be denoted by n. We have
Proposition 5. Let n be the number of the strips obtained from the divide
and conquer algorithm. We have n = v − 2, where v is the number of the
vertices of the mesh.
Proof: We notice that a strip of length l conquers l − 1 vertices, and thus n
strips of total length t conquer t − n vertices. The number of vertices to be
conquered is vI , the number of interior vertices of the mesh, hence, we have
t − n = vI , giving n = t − vI . The latter can also be written n = v − 2 as we
immediately see by applying Euler’s formula.
Tree-based Data Structures
179
The binary tree and the strip length information can be combined in
a single data structure, namely a binary tree with positive integer weights
assigned to its nodes. The next question is when such a data structure is
valid, i.e. when it represents a planar triangle mesh. We have
Proposition 6. Let T be a tree with n nodes and let the sum of the strip
lengths be t. Then, T represents a planar mesh if and only if
(i) t + 1 ≤ 2n holds for T and all its subtrees.
(ii) The strip lengths of the nodes with only left child are odd, and the strip
lengths of the nodes with only right child are either 1 or even.
Proof: Let b be the number of the boundary vertices of a planar mesh.
Applying Euler’s formula gives
b = 2v − t − 2
(1)
which from Proposition 5 becomes
b = 2n − t + 2
(2)
Then, the inequality 3 ≤ b, holding for the boundary of the mesh, gives
t + 1 ≤ 2n. Notice that the inequality 3 ≤ b is a standard assumption in the
literature of meshes as b = 2 would give two boundary vertices connected
between them with two different edges, while b = 1 would give a vertex
connected with itself.
Condition (ii) describes the exceptional cases where one of the submeshes
is empty and two edges of the dividing strip are glued together.
Conversely, if the condition (i) of the proposition holds, there is enough
free boundary to perform all the gluing operations and we get a valid triangle
mesh, while condition (ii) guarantees that we can perform the gluing in the
exceptional cases as well.
4.3 Arbitrary Topology
In the case of arbitrary topology the main difference is that a dividing strip
can have the same non-empty submesh on the left and the right. The simplest
example is a planar mesh with a hole in it, which is topologically equivalent
to a cylinder (cf. Fig. 4, right). In this case we need to encode only one branch
of the tree and give some additional information on how the boundary of the
corresponding submesh is glued to the other side of the strip.
If the genus of the mesh is g and there are h holes in it, it is a simple
topological fact that the number of the strips which do not separate the mesh
is at most 2g + h. For each such strip we need O(2 log v) bits to identify the
directed edge for gluing, and in the worst case O( 12 log v) bits for the extra
symbol.
180
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
4.4 The Connection with the EdgeBreaker
Before the study of the obtained data structure, it worth having a look at
the algorithm in a more general setting, clarifying some aspects which might
be obscured in a very concrete exposition. A first observation is that the
algorithm, like the EdgeBreaker, implicitly induces a traversal of the triangles
of the mesh. This traversal of the triangles can be seen at two levels, the first
level is the traversal of the triangles of a zig-zag strip, from the root of the
strip to the leading edges, and the second level is the traversal of the tree
that stores these zig-zag strips.
Also, we notice that the algorithm works not only with zig-zag strips but
with general strips as well. In fact, any bitstream the encoder and the decoder
would agree on, defines a way of building general strips, and thus a variation
of the method. Here we use the zig-zag strips as the most natural choice for
making a strip.
The fan strip is another important class of strips. In this case, assuming
a preorder traversal of the tree, we get the same traversal of the triangles as
the EdgeBreaker, and our approach differs only in the interpretation of the
obtained data. In fact, we can translate the encoding of the binary tree and
the strip lengths into the familiar C, L, E, R, S string of the EdgeBreaker and
vice-versa. Each strip length n can be written as a string of n − 1 C’s, and
for each node of the tree we use one of the L, R, S, E symbols, depending
on whether it has only left child, only right child, two children or no child.
Notice that because our data structure is non-linear, namely, a binary tree
rather than a symbol stream, it is not necessary to assume any particular
traversal of the tree to interpret the data. Although this has advantages in
the theoretical analysis of the algorithm, nevertheless, in the implementation
we usually assume a traversal to make things simpler.
5 Tree-based Data Structures
With the Divide and Conquer Algorithm, the encoding of triangle mesh connectivity encoding can be split into two separate but closely related subtasks.
The encoding of the binary tree, and the encoding of the strip lengths stored
in its nodes. We study these two encodings, first separately and then in their
interrelation. For simplicity we deal with planar meshes only. But, taking
into account the special output symbols and the changes of the Euler’s characteristic they introduce, the arbitrary topology can be treated in a similar
manner.
5.1 Binary Tree Encodings
The binary tree is one of the most popular structures for storage and maintenance of data, and thus, many basic related problems have been widely
Tree-based Data Structures
181
studied. For a brief comparative study of different binary tree encodings
see [13] and [16].
In our context, the relevance of the tree encoding methods becomes apparent with the observation that any binary tree can correspond to a planar
mesh. Indeed, if all the strip lengths are equal to 1, then by Proposition 6
every binary tree gives a valid planar mesh. The number of all the binary
trees with n nodes is given by the Catalan number Cn
Cn =
4n
(2n)!
∼ √ 3/2
n!(n + 1)!
πn
(3)
see [7] Exercise 9.8. Thus, there is an asymptotic bound of 2 bits per node.
Some of the existing methods for binary tree encoding enumerate all the
trees with n nodes so that each tree can be represented by an integer number. Obviously, such methods achieve optimal compression ratios, but the
encoding and decoding cost is very high, and especially for the large trees
we use here this cost is prohibitive. Other encoding methods traverse the
tree, transmitting one letter for each node. These methods are separated into
two categories. The methods which use a fixed alphabet and those using an
alphabet depending on the number of the nodes n.
The most common fixed alphabet encodement uses 4 letters, let say
{L, R, S, E} to make the analogy with the EdgeBreaker clearer. Each letter determines if the corresponding node has only left, only right, both or
none children. The cost is 2n bits, which, asymptotically achieves the bound
of 2 bits per node given by (3). By Proposition 5 this is also equal to 2 bits/v.
Another well-known fixed alphabet encoding is the Zaks’ sequences which
use the two letters alphabet {0, 1}. The encoding process first transforms the
binary tree into a complete binary tree by appending new leaves wherever
possible, that is, two new leaves at any old leaf and one new leaf at any
single child node. Then we traverse the nodes of the complete binary tree in
preorder, transmitting a 1 if the node is internal and a 0 if the node is a leaf.
There are standard algorithms deciding when a given sequence of 0’s and 1’s
is the Zaks’ sequence of a tree.
The size of the file encoding the tree can be further reduced with Arithmetic Coding [17]. In this case the compression ratio also depends on the
traversal of the tree. Notice that there are traversals, like the inorder, which
do not work with the above four or two letter encodings, because we can not
reconstruct the tree without some additional information.
The variable alphabet encodements now, most often use the letters of the
set {0, 1, . . . , n}. When it comes to compression issues they have the problem
that it is more difficult to find a sharp guaranteed upper bound which can be
trivially found for a fixed alphabet. Nevertheless, many times they are more
flexible, and there are standard algorithms determining the validity of a code,
making it easy to eliminate the transmission of redundant information.
An example of variable length encoding is the weight sequence, see [16].
There, the letter corresponding to a node is the number of the nodes of its
182
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
left subtree. The inductive argument showing that the method works is that
if we know the number of the nodes of the tree, and the number of the nodes
of the left subtree we can find the number of nodes of the right subtree by
subtraction, and we can continue recursively this process until reaching the
leaves. The weight sequence encoding of a tree has a special interest because
by Proposition 5 the number of the nodes n is related to v the number of
the vertices of the mesh. For this reason, the weight sequence is a useful
intermediate representation of a binary tree corresponding to a mesh.
5.2 Strip Lengths Encodings
The encoding of the strip lengths is equivalent to the encoding of v − 2
numbers summing up to t. The range of the numbers is from 1 up to the
length of the largest strip we create. Although the largest strip has always
length less than b v2 c, still this is not a sharp bound with any practical use.
The simplest way to encode such a sequence of numbers is to represent
the number k as a word of k bits consisting of k − 1 1’s followed by a 0.
The total cost in this case is t, and the total cost of encoding the mesh,
including the tree, is bounded by t + 2v − 4 < 4v. It worth noticing here that
the guaranteed performance of 4 bits/v of this very coarse encoding method,
can not be improved without going deeper into the study of the relationship
between the encoding tree and the corresponding strip-lengths.
Another, very popular method to encode a sequence of numbers is the
Huffman coding. Each number is assigned a unique code and the number of
bits we spend on each code depends on the probability of each number to
appear in the sequence. After the Huffman coding we can use Arithmetic
Coding to further exploit any existing entropy. Notice that the compression
achieved with the Arithmetic Coding depends on the order the strip lengths
are transmitted, that is, on the particular traversal of the tree. Also, notice
that because now the tree is given, and unlike the situation in Subsection 5.1,
any traversal works. For a survey of different tree traversals, see [3].
If the mesh has a relatively small boundary the number of vertices, and
thus, the number of tree nodes is about half the number of triangles. Therefore, the average strip length is near 2, and the entropy of strip lengths largely
depends on the number of strips with length 2. We have noticed by experiment that the more regular a mesh the more strips of length 2 occur in its
encoding. For an intuitive explanation of the last, see Figure 2: a large strip
passing through a regular area of the mesh creates a regular boundary with
vertices of valence 4, and this creates a lot of strips with length 2. This observation partly justifies the choice of the leading directed edges of the dividing
strip as the gates of the two submeshes. Another deterministic choice of the
gates, for example near the middle of the dividing strip, would increase the
length of the strips near the root of the tree but the result would be worse
compression ratios, because the total entropy would decrease.
Tree-based Data Structures
183
The Table 1 shows the experimental results for preorder and postorder
encoding of the tree with a 4 and a 2 letter alphabet, and preorder, inorder,
postorder and level traversal in the encoding of the strip lengths, for a variety
of meshes. In [12] we used preorder traversals for both the tree and the strip
lengths and we transmitted them in an interwoven fashion, that is, at each
node the code of the strip length followed immediately after the tree code.
Comparing the results there, even with the most favorable combination of
separate transmission of tree and strip lengths file, we see that they are
better. That means that there is a lot of entropy in the blend of tree codes
and strip lengths, and this entropy is exploited by the Arithmetic Coder.
Mesh
#V
315
david1
1512
david2
6035
david3
24085
david4
14070
dinosaure
6475
fandisk
428
mannequin1
mannequin2 11703
8268
venus
max-planck 100086
#F tpre,1 tpre,2 tpost,2
2.46 2.46 2.46
2.11 2.10 2.11
2.03 2.03 2.03
2.05 2.06 2.06
2.04 2.06 2.05
1.52 1.50 1.50
2.34 2.34 2.34
0.92 0.91 0.90
2.04 2.05 2.05
1.20 1.16 1.16
586
2924
11820
47753
28136
12946
839
23402
16532
199996
spre,H spre spost sin slevel
2.08 2.08 2.03 2.08
1.40
1.66 1.67 1.66 1.67
1.43
1.58 1.60 1.53 1.62
1.46
1.51 1.53 1.39 1.55
1.46
1.52 1.54 1.37 1.55
1.45
1.23 1.24 0.75 1.57
1.51
1.89 1.91 1.87 1.91
1.36
0.84 0.83 0.34 1.21
1.30
1.60 1.61 1.55 1.63
1.49
1.08 1.06 0.67 1.39
1.52
IRS02
3.94
3.56
3.39
3.18
3.13
1.95
3.79
1.06
3.46
1.42
Table 1. Compression ratios in bits/vertex for 10 models from [1]. The trees (t)
are encoded separately from the strip lengths (s). The suffixes indicate pre-, post-,
in-, and level-oder traversal, the 1-alphapbet (Zaks) or 2-alphabet. For spre,H only
Huffman coding is applied, Arithmetic Coding and a fixed alphabet is used in all
other columns. The last column shows the results in [12].
Next we assume that the tree code and the strip length code of a node
are sent one after the other. That means that we assume the same traversal
for both the tree code and the strip lengths code. We study the relationship
between the two encodings, and we see how we can save information from
the tree code using information from the strip-lengths and vice versa.
5.3 Tree First Transmission
Here we assume that the code of the tree is sent first, using the {L, R, S, E}
alphabet, and the code of the strip length follows. Some simple observations
can reduce the amount of information we have to send for the strip lengths.
A first observation is that because of Proposition 6, condition (ii), the
weight of an R node is either 1 or an even number, while the weight of
an L node is always odd. Another observation, from the same Proposition,
condition (i), is that all the leaves have strip length 1, and do not need
encoding. Going one step further, we notice that if an R is just above a leaf
then, by condition (i), the corresponding strip length is either 1 or 2 and can
be encoded with a single bit. Similarly, an L node just above a leaf can only
184
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
have a strip length 1, and we do not need to transmit any information. Fig. 6
shows the encoding near the leaves and the corresponding meshes.
1
1
1
2
1
1
1
2
1
1
1
1
3
1
1
1
Fig. 6. The encoding trees and the corresponding meshes near the leaves. Notice
that some of the rooted meshes are isomorphic as unrooted meshes.
The above observations are the simplest instances of a more general feature of our approach, namely that every node of the tree represents a gluing
operation and Proposition 6 gives a simple criterion to determine when such
a gluing operation is legal. Therefore, we can treat these instances in a unified
way by determining at each node all the legal gluing operations, and sending
only the necessary information for the decoder to distinguish between them.
This assumes a postorder reconstruction of the mesh.
Checking the criterion of the special gluings is straightforward. By Proposition 6 condition (ii), if the node is an L then the set of possible strip lengths
is restricted to the odd numbers, while if the node is an R the set of possible
strip lengths consists of the even numbers and the 1. For a criterion checking
the regular gluings, i.e. Proposition 6 condition (i), for each node we need
the number of nodes of its subtree, and the sum of the strip lengths of that
subtree. This information can be held in an auxiliary data structure, where
each node nj of the tree is assigned two integers (nj , wj ), the number of
nodes and the sum of strip lengths of its subtree. Notice that the integers w j
are essentially the weight sequence of the tree, see Subsection 5.1. When we
process a new node nj , we first find its children, let say njl , njr , and if the
integers assigned to them are (njl , wjl ) and (njr , wjr ), then
n j = n jl + n jr + 1
and
w j = w jl + w jr + s
(4)
where s is the strip length corresponding to nj . Then, Proposition 6, condition
(i), gives
(5)
wjl + wjr + s + 1 ≤ 2(njl + njr + 1)
giving
s ≤ 2njl + 2njr − wjl − wjr + 1
(6)
This way we find explicitly the set of all the strip lengths giving a legal
gluing operation at a node, and instead of transmitting the actual strip length
we send an offset determining its position in the set of all legal values. If the
Tree-based Data Structures
185
set contains only one element, that is, when the set is the {1} we send no
information. If the set has two elements, that is, if it is either the {1, 2} or
the {1, 3} we send only one bit. In all the other cases it is better to resort to
Huffman encoding of the offsets rather than using an ad hoc code for every
particular set, because of the significantly higher frequencies of the short
strips.
The algorithm we just described can also be used in conjunction with the
original Divide and Conquer algorithm, where we transmit the actual strip
lengths, as a test checking the validity of a code. In this case, proceeding as
above, we find the set of all legal strip lengths corresponding to a node and we
check if the actual value of s lies into that set. If this happens for every node
then all the gluing operations are legal and the code describes a valid mesh.
If there is a node with strip length outside the set, then the decoding process
will break at that point. Of course the testing algorithm must be coupled
with an algorithm checking the legality of the corresponding tree code, which
can be found in the literature.
5.4 Strip-lengths First Transmission
Suppose now that we first transmit the strip-length of a node and then the
tree code corresponding to it. From Proposition 6, condition (ii), even strip
lengths correspond to an S or an R node, while odd strip lengths greater
than 1 correspond to an S or an L node. Therefore, we need a single bit for
the tree code of the nodes with strip length greater than 1.
Table 2 shows some more results obtained with the encoding techniques
described in Subsections 5.3, 5.4. An additional column compares to the
Edgebreaker-like traversal when fan-strips are used instead of zig-zag strips.
We also show the results obtained the by the Alliez-Desbrun method [1],
which currently gives the best compression ratios.
5.5 The Valence 3 Vertices
From Proposition 6, and the above discussion of its implications, it is apparent
that the valence 3 vertices are very characteristic. Their peculiarity arises
from the fact that a zig-zag strip collapses to itself only when passing through
a valence 3 vertex. Equivalently, it is the only case when a strip of length
greater than 2 can correspond to an R or an L node . Therefore, in many
cases it may pay off to have an initial preprocessing step clearing the mesh
from its valence 3 vertices. Such a strategy to improve the efficiency of an
algorithm was also proposed in [2].
After the clearance step we work as in Subsections 5.3, 5.4 separating the
case of tree code transmission first from the case of strip length transmission
first. Sending the tree code first, we know that an L node can only store a strip
length equal to 1, because any greater strip length would create a valence 3
186
Ioannis Ivrissimtzis, Christian Rössl, and Hans-Peter Seidel
Mesh
pre post,H post fan
david1
david2
david3
david4
dinosaure
fandisk
mannequin1
mannequin2
venus
max-planck
3.94
3.53
3.36
3.13
3.09
1.90
3.79
1.02
3.42
1.38
3.30
3.35
3.40
3.39
3.38
3.42
3.29
3.27
3.40
3.43
3.94
3.53
3.36
3.14
3.10
1.94
3.78
1.07
3.42
1.42
3.86
3.57
3.37
3.19
3.13
1.94
3.79
1.05
3.45
1.42
A&D
2.96
2.88
2.70
2.52
2.25
1.02
2.51
0.37
2.37
n/a
Table 2. Compression ratios in bits/vertex. The table shows results for transmitting the tree (2-alphabet) and indices of valid strip lengths in an interwoven
fashion in pre- and post- oder with Huffman coding only resp. Arithmetic Coding.
The fan column gives results from using not zig-zag strips but fan-strips and a
preorder traversal, fixed alphabeth which corresponds to the bitstream obtained
from the Edgebreaker (with Arithmetic Coding applied). The compression ratios
are similar. The right most column shows the results of Alliez-Desbrun [1] for comparison. In this paper renderings of the corresponding meshes can be found. The
Max-Planck mesh with 100086 vertices has also been used for testing.
vertex, and therefore, we do not need to send any strip length information.
Similarly, a strip length corresponding to an R is either 1 or 2, and is encoded
in a single bit. On the other hand, if we first transmit the strip length of a
node, then any length greater than 2 corresponds to an S node and we do
not need any extra tree code. A strip length equal to 2, corresponds to either
an S or an R node and we need a single bit for the tree code.
6 Conclusion
We described a Divide and Conquer algorithm for the encoding of triangle
mesh connectivity. The naturally arising data structure for the storage of the
obtained information is a binary tree with positive integer numbers assigned
to its nodes. We studied this data structure, showing that there is a deep
correlation between the structure of the tree and the assigned integers, which
can benefit the performance of the algorithm.
References
1. P. Alliez and M. Desbrun. Valence-Driven connectivity encoding for 3D meshes.
In EUROGRAPHICS 01 Conference Proceedings, pages 480–489, 2001.
2. Pierre Alliez and Mathieu Desbrun. Progressive compression for lossless transmission of triangle meshes. In SIGGRAPH 01, Conference Proceedings, pages
195–202, 2001.
Tree-based Data Structures
187
3. Alfs Berztiss. A taxonomy of binary tree traversals. BIT, 26:266–276, 1986.
4. W.G. Brown. Enumeration of triangulations of the disk. Proc. Lond. Math.
Soc., III. Ser., 14:746–768, 1964.
5. M. Denny and C. Sohler. Encoding a triangulation as a permutation of its
point set. In Proceedings of the 9th Canadian Conference on Computational
Geometry, pages 39–43, May 15–17 1997.
6. N. Deo and B. Litow. A structural approach to graph compression. In MFCS
Workshop on Communications, pages 91–101, 1998.
7. Ronald L. Graham, Donald E. Knuth, and Oren Patashnik. Concrete mathematics: a foundation for computer science.2nd ed. Addison-Wesley, 1994.
8. Stefan Gumhold. Improved cut-border machine for triangle mesh compression.
In Erlangen Workshop ’99 on Vision, Modeling and Visualization, IEEE Signal
Processing Society, 1999.
9. Stefan Gumhold. New bounds on the encoding of planar triangulations. Technical Report WSI-2000-1, Wilhelm-Schikard-Institut für Informatik, Tübingen,
March 2000.
10. Stefan Gumhold and Wolfgang Straßer. Real time compression of triangle mesh
connectivity. In SIGGRAPH 98 Conference Proceedings, pages 133–140, July
1998.
11. Isenburg and Snoeyink. Spirale reversi: Reverse decoding of the edgebreaker
encoding. CGTA: Computational Geometry: Theory and Applications, 20, 2001.
12. I. Ivrissimtzis, C. Rössl, and H-P. Seidel. A divide and conquer algorithm
for triangle mesh connectivity encoding. In Pacific Graphics 02, Conference
Proceedings, 2002.
13. Jyrki Katajainen and Erkki Mäkinen. Tree compression and optimization with
applications. Int. J. Found. Comput. Sci., 1(4):425–447, 1990.
14. Andrei Khodakovsky, Pierre Alliez, Mathieu Desbrun, and Peter Schröder.
Near-optimal connectivity encoding of 2-manifold polygon meshes. Graphical
Models, special issue on compression, 2002.
15. Davis King and Jarek Rossignac. Guaranteed 3.67V bit encoding of planar
triangle graphs. In Proceedings of the 11th Canadian Conference on Computational Geometry, pages 146–149, 1999.
16. E. Mäkinen. A survey in binary tree codings. Comput. J., 34(5):438–443, 1991.
17. Moffat, Neal, and Witten. Arithmetic coding revisited. ACMTOIS: ACM
Transactions on (Office) Information Systems, 16, 1998.
18. Rossignac and Szymczak. Wrap&zip decompression of the connectivity of triangle meshes compressed with edgebreaker. CGTA: Computational Geometry:
Theory and Applications, 14, 1999.
19. Jarek Rossignac. Edgebreaker: Connectivity compression for triangle meshes.
In IEEE Transactions on Visualization and Computer Graphics, volume 5 (1),
pages 47–61. 1999.
20. Szymczak, King, and Rossignac. An edgebreaker-based efficient compression
scheme for regular meshes. CGTA: Computational Geometry: Theory and Applications, 20, 2001.
21. Gabriel Taubin and Jarek Rossignac. Geometric compression through topological surgery. ACM Transactions on Graphics, 17(2):84–115, April 1998.
22. Costa Touma and Craig Gotsman. Triangle mesh compression. In Proceedings
of the 24th Conference on Graphics Interface (GI-98), pages 26–34, June 18–20
1998.
23. W.T. Tutte. A census of planar triangulations. Can. J. Math., 14:21–38, 1962.
http://www.springer.com/978-3-540-40116-2