Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Resistive opto-isolator wikipedia , lookup
Index of electronics articles wikipedia , lookup
Superconductivity wikipedia , lookup
Power MOSFET wikipedia , lookup
Opto-isolator wikipedia , lookup
Magnetic core wikipedia , lookup
Current mirror wikipedia , lookup
Power electronics wikipedia , lookup
Surge protector wikipedia , lookup
Switched-mode power supply wikipedia , lookup
1
BASIC ELECTRICAL ENGINEERING
Unit I – DC Circuit
Basic Definitions
The electric potential at a point is the amount of bringing a unit positive charge from infinity to
that particular point. The electric potential due to a point charge at a distance r from it is equal to
where
is the permitivity of free space.
EMF is the external work expended by unit of charge to produce an electric potential difference
across two open circuited terminals. Unit: Volt. Example: Electrochemical cells.
Resistance is the property of a body by virtue of which it resists the flow of electricity through
it. It equals the difference of potential across the body divided by the current through it. Unit:
Ohm.
Electrical Conductance is the inducement to the flow of current. Hence, the electrical
conductance is the reciprocal of resistance. G=1/R.Unit: mho.
Electric Current : The flow of free electrons in a metal or a conductor is called electric current.
It is also defined as the rate of change of charge.
D.C and A.C
D.C: Direct Current is the unidirectional flow of electric charge. It is produced by
sources such as batteries, thermocouples, solar cells. The electric current flows in a constant
direction.
A.C: Alternating current is an electrical current that frequently reverses direction. It is
measured according to its cycles, with one complete cycle being counted each time a given
current travels in one direction and then doubles back on itself.
Electric Power : The rate at which work is done in an electric circuit is called electric power.
Units: i) P= VI Joules / sec (or) Watt/kW/MW (ii) P = horse power. (1hp=735 watts)
Electrical energy is the product of electric power and time for which the current flow in the
circuit.
Specific resistance of a material is the resistance offered by 1m length of the wire of material
having an area of cross section of 1m2.
2
Potential difference : The difference in the potentials of two charged bodies is called potential
difference. If the potential difference is 1volt, if 1 joule of work is done in transferring 1coulomb
of charge from one point to other.
Electrical energy is the product of electric power and time for which the current flow in the
circuit. Units: Joule, watt-hour, kilo watt-hour, 1 unit.
Statement of Ohm’s Law: the ratio of potential difference between any two points of a
conductor to the current flowing between them is constant, provided the physical conditions do
not change.
Significance: Ohm’s law can be expressed in three forms.
It is the basic equation to solve any AC and DC circuits
Difference between emf and P.D
Potential difference
EMF
It causes current to flow It
through the circuit
maintain
the
potential
difference in the circuit
Component and circuit
Component: The individual elements in the circuit is called component.
Circuit: The closed path followed by an electric current is called an electrical circuit.
Node is a junction where two or more circuit elements are connected together
A branch in an electrical circuit is that part of a circuit which lies between two
junction points.
A loop is any closed path of a circuit through which the electric current passes.
A mesh is the most elementary form of a loop and cannot be further divided into other loops. But
a loop cannot be called as mesh.
3
Comparison of series and parallel circuits.
S.No
Series circuit
1
The same current flows through The same voltage exist across all the
each resistance
2
resistances in parallel
The voltage across each resistance is The current through each resistance is
different
3
Parallel circuit
different
The sum of the voltages across all The sum of the currents through all the
the resistances is the supply voltage
V=
resistances is the supply current
I=
Characteristics of series circuit.
1. The same current flows through each resistance.
2. The supply voltage is the sum of the individual voltage drops across the resistance
i.e. V=
3. The equivalent resistance is equal to the sum of the individual resistances.
4. The equivalent resistance is the largest of all the individual resistances.
Characteristics of parallel circuit.
1. The total current gets divided into the number of paths equal to the number of resistances in
parallel. The total current is always sum of all the individual currents
i.e. I =
2. The same potential difference gets across the resistance in parallel.
3. The reciprocal of the equivalent resistance of a parallel circuit is equal to the sum of the
reciprocal of the individual resistances.
4. The equivalent resistance is the smallest of all the individual resistances.
4
Reason for domestic appliances are connected in parallel
The electrical appliances are rated for same voltages but different power hence can be connected
in parallel without affecting their individual performance. If a break occurs in any one branch of
the circuit, it will have no effect on the other.
Kirchoff’s current and voltage law.
Kirchoff’s current law: The algebraic sum of currents meeting at a junction or node in an
electrical circuit is zero.
It is also stated that the sum of incoming currents is equal to the sum of outgoing
currents.
Kirchoff’s voltage law: In any closed circuit or mesh or loop, the algebraic sum of all the
voltages
taken
around
is
zero
Kirchoff’s law statement and illustrations:
All electrical circuits are based on this law. It is a set of two laws, a current law and a
voltage law together known as Kirchoff’s law.
Kirchoff’s First law –current law:
Statement: The algebraic sum of currents meeting at a junction or node in an electric circuit is
zero.
Explanation:
In algebraic sum sign is taken into account. Consider five conductors,
carrying
currents, I1,I2,I3,I4 and I5 meeting at a point O as shown in figure. If we assume the currents
flowing towards the point O is taken as positive and going away as negative.
Applying kirchoff’s law we get
5
The above law can also be stated as ‘The sum of the currents flowing towards any
junction in an electric current is equal to the sum of the currents flowing away from that
junction’.
Kirchoff’s second law –voltage law
Statement: In any closed circuit or mesh or loop, the algebraic sum of all the voltages taken
around is zero.
Sign convention:
(i)
If we go from a positive terminal of the battery or source to the negative terminal, there is a fall
in potential so emf is assigned a negative sign
(ii)
If we go from a negative terminal of the battery or source to the positive terminal, there is a fall
in potential so emf is assigned a positive sign
(iii)
If we go through the resistance in the same direction as the current there is a fall in potential. So
the sign of drop in potential is negative
(iv)
If we go through the resistance in the opposite direction to the current flow then there is a rise in
potential. So the sign of gain in potential is positive.
Illustrations of Kirchoff’s law:
Kirchoff’s law can be explained with the help of a circuit given below
6
(i)
Applying KCL at junction C, we get I3 = I1+I2
(ii)
There are three loops, namely ABCFA, EDCFE, & ABCDEFA. Kirchoff’s voltage law can be
applied to get desired equation.
Loop ABCFA:
As we go round the loop, the sign of emf E1 is positive. The sign of I1R1drop is negative,
and for I3 R2 is also negative as there is a potential drop.
So we get
+E1- I1R1- I3R2 = 0
E1 = I1R1 + I3R2
Loop EDCFE:
If we go round the loop in the order, the sign of emf E2 is positive, drop I2R3 is negative
and drop I3R2 is negative. Hence we get
+E2- I2R3- I3R2 = 0
E2 = I2R3 + I3R2
Loop ABCDEFA:
Applying KVL we get
+E1- I1R1+ I2R3 - E2 = 0
E1 - E2 = I1R1 - I2R3
By solving the above equation we can determine the current and resistance and voltage drops.
Equations for star to delta transformation.
Consider a star network and its equivalent delta network as shown in figure. The equivalent
resistance between the terminals a,b and c is R AB, RBC and RCA . When the two networks are
electrically equivalent, the resistances between the terminals as measured in star and delta must
be same.
In star network the resistance
Between the terminals a and b is Rab = Ra + Rb
(1)
Between the terminals b and c is Rbc = Rb + Rc
(2)
Between the terminals c and a is Rca = Rc + Ra
(3)
7
The equivalent resistance between the terminals a and b in delta form is
(4)
Equating equation (1) and (4) we get
(5)
In a similar manner, equating the effective resistances between the terminals b, c and a we get
(6)
(7)
Subtracting (6) from (5) we get
Taking LCM and simplifying we get
(8)
Adding equation (8) and (7) we get
Simplifying we get
(9)
8
Similarly we get for other resistances as
(10)
(11)
Dividing equation (9) by (10) we get
=
(12)
Dividing equation (9) by (11) we get
=
(13)
Substituting (12) and (13) in (9) we get
(14)
Similarly we can derive for
(15)
(16)
Equations for delta to star transformation.
Consider a delta network and its equivalent star network as shown in figure.
The
equivalent resistance between the terminals a,b and c is RAB, RBC and RCA . When the two
9
networks are electrically equivalent, the resistances between the terminals as measured in star
and delta must be same.
In star network the resistance
Between the terminals a and b is Rab = Ra + Rb
(1)
Between the terminals b and c is Rbc = Rb + Rc
(2)
Between the terminals c and a is Rca = Rc + Ra
(3)
The equivalent resistance between the terminals a and b in delta form is
(4)
Equating equation (1) and (4) we get
(5)
In a similar manner, equating the effective resistances between the terminals b, c and a we get
(6)
(7)
Subtracting (6) from (5) we get
Taking LCM and simplifying we get
(8)
Adding equation (8) and (7) we get
10
Simplifying we get
(9)
Similarly we get for other resistances as
(10)
(11)
Resistance in Series
The circuit in which resistances are connected end to end so that there is one path for the
current flow is called series circuit. Let three resistances R1,R2 and R3 can be connected in series
across a battery of voltage V volts as shown in figure. The current I is same throughout the
circuit. By applying ohm’s law, the voltages across
The resistances are
The ratio of (V/I) is the total resistance between the points A and B. It is called total or
equivalent resistance of the three resistances. Hence when number of resistance is connected in
series the equivalent resistances is the sum of all the individual resistances.
RT = R1+R2+R3
11
Voltage division technique:
Consider the resistances R1,R2, R3 …Rn be connected in series across a battery of V volts. The
current flowing through all the resistances is same as shown in figure.
For n resistances in series the equivalent resistance is
RT= Rs =
By Ohm’s law the current through the series circuit
Voltage across each resistance is
=
Resistance in Parallel
If one end of each resistance connected to one common point and the other end of each
resistance connected to another common point, there will be many paths for the current flow as
the number of resistances. This is called parallel circuit. Let three resistance R1,R2and R3 be
connected in parallel across a battery of volts V. the total current I divides into three parts: I1
flowing through R1 and I2 through R2 and I3 through R3. The voltage across each resistance is
same.
12
By applying Ohm’s law, current through each resistance is
The ratio of (V/I) is the total resistance between the points A and B. It is called total or
equivalent resistance of the three resistances.
And
Hence
Hence, when a number of resistances are connected in parallel, the reciprocal of the total
resistance is equal to the sum of the reciprocals of individual resistances.
Current Division Techniques:
Two resistances R1 and R2 are connected in parallel across a battery of V volts. Current through
R1 is I1 and through R2 is I2. The total resistance RT is
13
Hence the total value of two resistances connected in parallel is equal to their product divided by
their
sum.
The
branch
currents
I1
and
I2
can
be
deduced
as
By applying ohm’s law the current through the resistance R1
And current through the resistance R2
Hence in a parallel circuit of two resistances, the current in one resistor is the total current times
the opposite resistance divided by the sum of the two resistances.
Voltage & Current Division Techniques:
Voltage division technique:
Consider the resistances R1,R2, R3 …Rn be connected in series across a battery of V volts. The
current flowing through all the resistances is same as shown in figure. For n resistances in series
the equivalent resistance is
RT= Rs =
By Ohm’s law the current through the series circuit
Voltage across each resistance is
Voltage across any resistance in the series circuit
=
14
Current Division Techniques:
Two resistances R1 and R2 are connected in parallel across a battery of V volts. Current through
R1 is I1 and through R2 is I2. The total resistance RT is
Hence the total value of two resistances connected in parallel is equal to their product divided by
their
sum.
The
branch
currents
I1
and
I2
can
be
deduced
as
By applying ohm’s law the current through the resistance R1
And current through the resistance R2
Hence in a parallel circuit of two resistances, the current in one resistor is the total current times
the opposite resistance divided by the sum of the two resistances.
15
Unit II – AC Circuits
Basic Definitions
Resistance
It is defined as the property of the material by which it opposes the flow of current through it. It
is denoted by R. Unit is Ohm (Ω)
Symbol :
Inductance.
A property of an electric circuit by which an electromotive force is induced in it by a variation of
current either in the circuit itself or in a neighboring circuit.
Capacitance.
A capacitor is an electronic component used for storing charge and energy. The usual capacitor is
a pair of parallel plates separated by a small distance. When a steady voltage is applied across a
capacitor, a charge +Q is stored on one plate while -Q is stored on the opposite plate. The
amount of charge is determined by the capacitance C and the voltage difference V applied across
the capacitor:
Capacitance is measured in farads. One farad (F) equals one coulomb per volt.
Alternating voltage.
A voltage that reverses direction in regular cycle is called alternating voltage.
Actual power : There is real power consumption in any circuit when a current component is in
phase with voltage. It is measured in watts.
Actual or real power
P
Reactive or Quadrature power.
There is a reactive power consumption in any circuit when a current component is in Quadrature
with voltage, it is measured in Ampere reactive.
Reactive power = V
Power factor: It is the cosine of the phase angle between voltage and current.
Power factor =
16
Complex or apparent power.
Complex or apparent power (S): It is calculated as the product of voltage and current. It is
measured in volt ampere. Complex or apparent power S = V× I
Waveform: A wave form is a graph in which the instantaneous value of any quantity is plotted
against time.
Amplitude and Frequency.
Amplitude: The maximum positive or negative value of an alternating quantity is called
amplitude.
Frequency: The number of cycles per second of an alternating quantity is known as
frequency. Unit of frequency is expressed in hertz.
Admittance.
It is defined as the inverse of impedance. The SI unit of admittance is the mho.
Where, Y is the admittance, measured in mho. Z is the impedance, measured in ohms.
Phasor diagram for RC series circuit.
Phasor diagram for RLC series circuit.
17
Impedance triangle
A triangle formed of three sides namely resistance, reactance and impedance is called
impedance triangle.
Bandwidth
Band width of a circuit is given by the band of frequencies which lies between two
points on either side of the resonant frequency where current falls to 1/
of its
maximum value. This band of frequencies also provides resonance effects. There are two
frequencies (
and
) on either side of
Power at these frequencies =
at which current is equal to
R.
Band width =
=
Q factor.
Q factor is defined as the voltage magnification at resonance.
Q=
=
(or)
Q=
Resonance frequencies?
The frequency at which resonance occurs is called resonance frequency.
=
Inductive reactance and capacitive reactance.
Inductive reactance
= ωL
Capacitive reactance
= 1/ωC
Peak factor and Form factor.
Form factor is defined as the ratio of RMS value to the average value.
Form factor =
Peak factor is defined as the ratio of peak value to the RMS value.
Peak factor
.
18
Difference between direct current and alternating current
S.No.
Direct current (DC)
1
It is the unidirectional flow of electric It
charge
Alternating current (AC)
is
the
flow
of
electric
charge
periodically reverses direction.
Direct current is produced by sources Nuclear power, Thermal power
2
such as batteries, thermocouples, solar
cells.
3
Square wave
Sinusoidal wave or sine wave.
Reason for sinusoidal wave form taken as standard waveform in ac circuits?
Because sinusoidal waveform is an alternating waveform in which sine law is followed. NonSinusoidal wave form is an alternating wave form in which sine law is not followed
.
RMS value of alternating quantity.
RMS value or effective value : The effective value or RMS value of an alternating current is
defined by that steady value of current (dc) which when flowing in a given circuit for a given
time produces the same heat as would be produced by the alternating current flowing in the same
circuit for the same time.
RMS value =
Average value of alternating quantity.
Average value of ac: The average value of an ac is given by that steady current which
transfer across a circuit the same charge as would be transferred by the ac across the same
circuit in the same time.
=
Representation of alternating quantity in rectangular and polar form.
The phasor diagram for alternating quantities can be represented in Rectangular and polar
form.
19
Rectangular form :
From figure
It is seen that the x component of
is R
and y- component of
phasor R can be represented as
is R. Thus the
this is equivalent to
and it is called rectangular form. In general, the rectangular form is
Polar form: In figure
represents the magnitude of vector.
represents its
inclination counter-clock wise direction with x-axis. A
polar form of
complex quantities.
Balanced three phase system
A balanced three phase system is where the current into loads placed on all three phases of the
service are assembly close to each other in amperage. In a balanced three phase system describes
a three phase load in which each phase current is identical in both magnitude and phase.
Relation between line and phase value of voltage and current in a star connected load.
Phase current = Line voltage.
Line voltage =
phase voltage.
Relation between line and phase value of voltage and current in a delta connected load.
Phase voltage = Line voltage
Line current =
phase current
20
Relation between the phase and line voltage and current in a delta connected load
Here the dissimilar ends of the three phase coils are connected together to form a mesh. Wires
are drawn from each junction for connecting load. We can connect only three phase loads as
there is no fourth wire available. Let us now analyze the above connection. The system is a
balanced one hence the currents and the voltages will be balanced.
Notations used in the star connection are used here.
Phase voltage.
Phase currents.
Line voltage.
Line current.
Voltage relationship: Applying KVL to the loop consisting of
We have ,
and
.
Similarly,
.
Thus,
. Phase voltage = Line voltage.
Current relationship: Applying Kirchhoff’s current law at the junction of
have
,Using law of parallelogram,
=
=
We have,
Hence
=
–
and
and
, and
. We
21
Thus, Line current =
IL =
Power relationship: Let
be the power factor of the system.
Power per phase =
Power consumed in three phase = 3
=3
=
watts.
Reactive power in one phase =
Total reactive power =
=
Apparent power per phase =
Total apparent power =
=
Relation between the phase and line voltage and current in a star connected load
The three similar ends of the three phase coils are joined together to form a component point.
Such a point is called the star point or the neutral point. The free ends of the three phase coils
will be operating at specific potentials with respect to the potential at the star point.
It may be noted that wires are drawn from the three free ends for ends for connecting loads. We
actually have here three phase four wire system and three phase three wire system.
Let us analyses the relationship between currents and relationship between voltages.
Notation defined:
phase voltage.
phase currents.
line voltage.
line current.
22
In a balanced system,
.
Current relationship:
Applying Kirchhoff’s current law at nodes
We get,
;
;
.
This means that in a balanced star connected system, phase current equal the line current.
Voltage relationship:
Apply KVL to the loop consisting of voltage
.
We have,
Using law of parallelogram,
=
Similarly,
and
and
=
=
Thus,
Line voltage =
Phase voltage.
Power relationship:
Let
be the power factor of the system.
23
Power consumed in one phase =
Power consumed in three phase = 3
=3
=
watts.
Reactive power in one phase =
Total reactive power
= 3
Apparent power per phase
= 3
Total apparent power
=3
=
=
(volt ampere)
Measurement of three phase power using two watt meter method.
The power in a three-phase balanced or unbalanced circuit can be measured with two
wattmeter method. We shall discuss the measurement of power in a balanced system
only. We shall assume the following.
i)
The three phase supply is balanced.
ii) The three phase load is balanced.
iii) Phase sequence is R, Y and B.
iv) Load is R-L in nature.
The measurement of power when the load is star connected. The current coil of the watt
meters are connected in R and B lines and the pressure coils across R & Y and B & Y
respectively.
For wattmeter 1:
Current measured =
Voltage measured =
Phase angle between them = (30° + ø)
Power measured =
=
=
24
For wattmeter 2:
Current measured =
Voltage measured =
Phase angle between them =
Power measured =
=
==
Now
=
=
=
.
= total power in a three phase circuit.
Thus, two wattmeter connected approximately in a 3- phase circuit can measure the total
power consumed in the circuit.
Power factor expression:
=
25
Power factor, cos ø =cos {
}
Delta connected load: The measurement of power when the load is delta connected.
i) The three phase supply is balanced.
ii)
The three phase load is balanced.
iii) Phase sequence is RYB.
iv) Load is R-L in nature.
For wattmeter 1:
Current measured =
Voltage measured =
Phase angle between them = (30° + ø)
Power measured =
=
=
For wattmeter 2 :
Current measured =
Voltage measured =
Phase angle between them = (30°- ø)
Power measured =
=
=
Now
=
26
=
=
.
= Total power in a three phase circuit.
=
Power factor,
=
{
}
It can be noted that from the above two analyses that the reading of the individual
wattmeter remain the same for the quantum of load irrespective of the nature of
connection.
Principle and generation of three phase emf
Definition: The three phase system is a very common poly phase system. It could be viewed as
the combination of three single phase system with a phase difference of 120° between every pair.
Generation, transmission and distribution of three phase power are cheaper. Three phase system
is more efficient compared to single phase system. Uniform torque production occurs in three
phase system whereas pulsating torque is produced in the case of a single phase system. Because
of these advantages, the overall generation, transmission and distribution of electrical power is
usually of three phase.
Generation: Consider three similar coils RR’, YY’ and BB’ placed in a magnetic field of
maximum value
Webers. The coils are displaced by an angle of 120° in space between any
two. Let all the coils rotates in the anti clock wise direction at an angular velocity ω.
27
According to Faraday’s law of electromagnetic induction emfs are induced in the coils
RR’, YY’ and BB’. The induced emf in coil YY’ lags behind the induced emf in coil RR’ by
120°.The induced emf in coil BB’ lags behind that in coil RR’ by 240°.
Expressing mathematically,
(Reference quantity)
All the three induced emfs have the same amplitude, same period and frequency. Thus
the above sets of voltages are called three phase balanced system of voltages. The Waveforms of
the induced voltages are shown in figure.
Phasor representation: Let the emf induced in R phase,
by 120° and
lags
be taken as reference
by 240°. The three phasors are represented in above
lags
the
above fig.
Phase sequence: It indicates the rotation of phasors in a particular direction. The order in
which the different phasors reach their respective maximum value is known as phase sequence.
If the phase sequence is given as RYB then the convention is R phase reaches its maximum
value first, Y phase follows R and B phase follow Y In reaching the maximum value. The RYB
sequence in the anti clock wise direction define the positive phase sequence.
For the same system if the phase sequence is given as RBY it indicates that R phases
reaches its maximum value first , B phase follows R and Y phase follows B in
the maximum values. RBY defines the negative phase sequence.( refer fig.)
reaching
28
Expression for the average value and RMS value of sinusoidal equation.
Definition: The average value of an ac is given by that steady current which transfers across a
circuit the same charge as would be transferred by the ac across the same circuit in the same
time.
The average value,
The average value can be easily obtained by first finding the average value for a small
interval of time and then integrating over the curve, i.e.
=
This is nothing but the ration of the area under the curve over one complete cycle to
the base. Analytical method,
Let,
Since this is a symmetrical wave it has two equal half cycles a namely positive and
negative halves. Considering one half cycle for this symmetrical wave the average
value is
=
=
=2
=
×2
/
= 0.637
RMS value:
The effective value or RMS value of an alternating current is defined by that steady
value of current (dc) which when flowing in a given circuit for a given time produces the same
29
heat as would be produced by the alternating current flowing in the same circuit for the same
time.
Determination of RMS value:
Let the alternating current be represented by
=
(
ω t)
Mean square of AC =
=
d
=
=
=
=
The RMS value of the alternating sinusoidal current is
I=
=
= 0.707
Similarly for an alternating voltage Vrms
RMS value of a wave can also be obtained by the formula
RMS value =
R-L SERIES CIRCUIT:
Let us consider a circuit in which a pure resistance R ohms and a purely inductive
coil of inductance L henries are in series (Figure.)
Let
be the applied voltage
Circuit current at any instant
I = Effect value of circuit current
= Potential difference across resistor
Potential difference across inductor
= Frequency of applied voltage
30
The same current I flow through R and L. hence I is taken as reference vector
Voltage across R =
=IR in phase with I.
Voltage across L =
=
Leading I by 90
At any instant, applied voltage
V=
The Applied voltage
V=
=
Magnitude of
Current
I=
(refer Fig.)
= impedance of circuit (Fig.)
=
=
)
= I
)
,
=
=
)=
)
31
From the voltage triangle figure, if common parameter I is removed, the same becomes
an impedance triangle, shown in Fig. From the ∆le ABC,
tan
=
=
=
=
is called the phase angle and it is the angle between V and I. It is the value lies
between 0 and 90 and Z = R + j XL, Z = R + j
=Z
.
Power factor: from the ∆ ABC
Power factor =
=
the current I lags the total voltage (V). So the
power factor of an R-L circuit is lagging .Also
=
Actual power (P):
There is a real power consumption in any circuit when a current
component is in phase with the voltage. It is measured in watts.
P=
P= VI
=VI× =
Reactive power:
Reactive power = V × Quadrature component of current
The unit of reactive power is VAR.
Apparent power:
It is calculated as the product of voltage and current. It is measured in volts
ampere. Complex or apparent power S = V× I=
=
From the figure,
Magnitude of
S=
32
Wave form: The current I lags behind the applied voltage V by an angle . Hence if the
applied voltage is given as
The current equation is
Where,
RC circuit:
Let us consider the circuit shown in fig .in which a pure resistance R ohm and a pure
Capacitance of C Farad is in series.
Let
be the applied voltage.
i = Circuit current at any instant.
I = Effect value of circuit current.
= Potential difference across resistor.
= Potential difference across capacitor.
= Frequency of applied voltage.
The same circuit I flows through R and C
Voltage across R =
= IR in phase with I.
33
Voltage across L =
= IXC lagging I by 90
Applied voltage
=
Applied voltage
=
=
Magnitude of V =
= impedance
=
=
= I
Current
I=
=
)
=
From the voltage triangle of fig, if the common parameter I is removed the same becomes an
impedance triangle shown in figure.
From the ∆ ABC
tan
=
=
=
=
is called the phase angle and it is the angle between V and I.
It is the value lies between 0 and 90 and Z = R - j XL.
Z=R-j
Power factor: From the ∆ A
=Z
.
34
Power factor =
=
the current I leads the total voltage. So the power factor of an R-C
circuit is leading. Also
= cos {
Power calculation: As in the case of R-C series circuit, here also we can define actual power
reactive and apparent power.
Actual power (P): There is real power consumption in any circuit when a current component is
phase with the voltage. It is measured in watts.
P=V
P= VI
= VI × =
Reactive or quadrature power measured in volt ampere reactive is Q = VI sin
Complex or apparent power measured in volt ampere is S = V I.
Here,
Magnitude of
S=
Wave form: referring the fig., the current I leads the applied voltage V by an angle
the applied voltage is given as
The current equation is
Where,
. Hence if
35
RLC circuit:
Consider a circuit as shown in figure having resistance R ohms, inductance L
Henry and capacitance C farads which are all connected in series.
Let the applied voltage be
the applied voltage.
i = Circuit current at any instant.
I = Effect value of circuit current.
= Potential difference across resistor.
= Potential difference across inductance.
= Potential difference across capacitor.
f = Frequency of applied voltage.
The same current I flow through R, L and C. Hence the current I is taken as reference vector.
Voltage across R =
= IR in phase with I.
Voltage across L =
=I
voltage leads I by 90
=jI
Voltage across C =
= IXC voltage lags I by 90
=-jI
36
Applied voltage
=
Applied voltage
= I (R +j
= (R +j
-j
=
)=
-j
)
= impedance
,
is called net reactance. If
circuit. If the
>
Magnitude of V =
Current
>
the circuit will behave like R-L
the circuit will behave like R-C circuit.
=
I=
I=V/
Phasor diagram:
Case (i) if
>
X will be in inductive in nature if
>
The circuit will behave like an R-L circuit.
From the impedance triangle of figure
tan
=
=
=
Power factor =
=
Current lags the applied voltage by an angle , Power factor is lagging.
37
Case (ii) If
>
, reactance will be capacitive in nature and the circuit will behave like
a R-C circuit. From figure we can draw the impedance diagram.
tan
=
=
=
Power factor =
=
current leads applied voltage by an angle φ.
Therefore Power factor is lead.
is called the phase angle and it is the angle between V and I. It
is the value lies between 0 and 90 .
Power calculation:
As in the case of R- L circuit, here also
Actual or real power P = V I
Reactive or quadrature power Q = VI sin
VAR
Complex or apparent power S = V I volts ampere
Here,
Power factor = cos
=
Waveform:
Referring the figure, the applied voltage is given as
The current equation is
Positive for case (ii) i.e
>
38
Negative for case (i) i.e
>
39
UNIT III - Machines
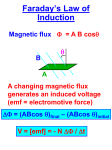
Magnetic flux.
The Magnetic lines of force or the amount of magnetic field produced by a magnet is
called magnetic flux. Its unit is Weber. (1 wb = 108 magnetic lines).
Magnetic flux density.
Magnetic flux density is defined as the flux per unit area, which is held at right angles to
the flux direction.
B=
wb/m2 (or) Tesla.
Magnetomotive force
Magneto motive force is the cause for producing flux in a magnetic circuit. It is the
product of current flowing through a coil of N turns. Its unit is ampere. It is also referred
as Ampere turns (AT).
F = N I amps turns
Magnetic field intensity.
Magnetic field Intensity or Magnetizing force (H) is defined as MMF per unit length of
the magnetic flux path. It is a measure of the ability of a magnetized body to produce
magnetic induction in other magnetic substances. Its unit is ampere/meter.
H=
Permeability.
The flux density (B) is proportional to the magnetizing force which produces it.
BαH
B = µH
µ is called permeability. It is defined as the ratio of magnetic flux density and magnetic
field intensity.
Relative permeability
Relative permeability of a medium is defined as the ratio of the flux density produced in
that medium to the flux density produced in vacuum by the same magnetizing force.
=
Absolute permeability µo = 4π x 10-7 Henry/m.
for any other medium µ = µr x µo
40
Reluctance
Reluctance is defined as the ratio of magneto motive force and magnetic flux. It is
denoted by S.
S=
. Its unit is Amp/Weber.
Permeance
Permeance is defined as the reciprocal of reluctance and is the readiness with which
magnetic flux is developed. Its unit is Weber per Amp.
Leakage flux.
The flux which does not follow the desired path in magnetic circuit is known as leakage
flux. To account for the leakage flux, leakage coefficient is used which is defined as
λ=
=
Magnetic circuit
Magnetic circuit is the path followed by magnetic flux. Magnetic flux follows a complete
loop or circuit coming back to the starting point. Generally magnetic flux leaves the north
pole, passing through air, medium and enters at its south pole and finally reaches the
point where it started.
Leakage coefficient.
Leakage coefficient is defined as the ratio of total flux and useful flux. It is denoted by λ
λ=
=
Right hand gripping rule.
Hold the conductor in the right hand with the outstretched thumb pointing in the direction
of current. Then the other fingers point in the direction of the magnetic field around the
conductor.
Right hand cork screw rule.
The direction of the magnetic field is the direction of rotation of the right handed
corkscrew turned so as to advance along the wire in the current direction.
Fleming left hand rule.
Stretch out the fore finger, middle finger and thumb of the left hand so that they are in
right angles to each other. If the fore finger points in the direction of magnetic field and
41
the middle finger points towards the direction of current, then the thumb will point to the
direction of motion of the conductor.
Fleming right hand rule.
Hold the thumb, the fore finger and the middle finger of the right hand at right angles to
each other. If the thumb points to the direction of motion and the fore finger points to the
direction of magnetic field, then the middle finger will point the direction of induced emf.
Faraday’s law of electromagnetic induction.
Whenever the magnetic flux linked in a circuit changes, an emf is always induced in it.
The magnitude of such an emf is proportional to the rate of change of flux linkages.
Lenz’s law.
Lenz’s law states that any induced emf will circulate a current in such a direction so as to
oppose the cause producing it. This law gives the nature of induced emf.
Induced emf.
Whenever there is a change in magnetic flux linked to a circuit, an emf is produced. This
emf which is produced due to the change in flux linkage is known as induced emf.
Types of induced emf
There are two types of induced emf
a)
Statically induced emf
b)
Dynamically induced emf.
Statically induce emf is further divided into
a) Self induced emf
b) Mutually induced emf.
Statically induced emf
If the conductor is held stationary and the magnetic field is moving or changing, then the
emf induced is known as statically induced emf.
(e.g) Transformer
Whenever the conductor is held stationary in a varying magnetic field, statically induced
emf is created. It is classified into two types.
(i)
Self induced emf
(ii)
Mutually induced emf.
42
Dynamically induced emf
If the conductor is moved in a stationary magnetic field in such a way that there is a
change in magnitude of magnetic flux, then the emf induced is known as dynamically
induced emf.(e.g) Generator.
Mutual inductance.
Mutual inductance between two circuits is defined as the flux linkages of one circuit per
unit current in the other circuit. Its unit is Henry.
M=
or
Coefficient of coupling.
Coefficient of coupling or coupling coefficient is defined as
K=
Where M – Mutual inductance,
L1, L2 – Self inductance of individual coils.
Principle behind the working of DC motor.
Whenever a current carrying conductor is kept in a stationary magnetic field an electro
motive force is produced. This force is exerted on the conductor and hence the conductor
is moved away from the field.
Back emf in a DC motor
In a DC motor, as the coil rotates, magnetic flux through it changes and it starts working
as a dynamo. An induced emf is produced. It opposes the applied potential difference V.
Hence this emf is called back emf. Due to this the current in the coil is reduced.
Transformer is a device that converts a low alternating voltage at high current into a high
alternating voltage at low current and vice versa. It is an electrical device based on the principle
of mutual induction between the coils.
Transformer ratio.
In an ideal transformer,
=
=k
k is called turn ratio or transformation ratio of the transformer.
Where Ep - induced emf in primary; Es - induced emf in secondary; Np – number of turns
in primary and Ns – number of turns of secondary coil.
43
In a DC motor, for maximum output power, the back emf must be half of the applied
potential.
Efficiency of a motor
Η=
=
= =
For max. output
E I = maximum
E(
= max
Differentiating with respect to E, we have
-
=0
E = V/2. Hence Proved.
Step up and step down transformers.
S.No.
Step up transformer
1.
No.
of
windings
Step down transformer
in
the No. of windings in the secondary is
secondary is greater than the lesser than the primary.
primary.
2.
Transformer ratio (k) is greater Transformer ratio (k) is less than 1.
than 1.
3.
The
induced
emf
secondary is more.
in
the The induced emf in the secondary is
less.
Eddy currents
When an ac source is used to drive current through the coil, an oscillating flux is set up
throughout the material. This induces an emf similar to other emfs throughout the core
and causes circular currents within the coil. These circular currents are called eddy
currents
Hysteresis : The lagging of the magnetic flux density (B) behind the Magnetizing field (H) is
known as hysteresis.
Coercivity and retentivity : The field which is required for the material, in the direction
opposite to its magnetization, to remove the residual magnetization is called coercivity. When
the magnetizing field becomes zero, the magnetization does not become zero but retains a certain
amount. This value of magnetization is called retentivity.
44
B-H Curve for a magnetic material.
Self inductance.
Self inductance of a circuit is the flux linkage per unit current in it. Its unit is Henry. It is
denoted as L.
L=
Transformer
Principle
It works on the principle of electromagnetic induction. Here conductor is stationary and the
magnetic flux is varied with respect to time. Hence the emf induced is statically induced emf.
Construction
Transformer is a static piece of apparatus used to transfer electrical energy from one circuit to
another. The two circuits are magnetically coupled. One of the circuits is energized by
connecting it to a supply at specific voltage magnitude, frequency and waveform. Then, a
mutually induced voltage available across the second circuit at the same frequency and
waveform but with a change in voltage magnitude is desired.
45
Essential requirements
a) A good magnetic core
b) Two windings
c) Time varying magnetic flux
Transformer core is generally laminated and is made out of a good magnetic material (e.g.)
silicon steel. The material should have high relative permeability and low hysteresis loss.
There are two windings in a transformer. They are primary and secondary windings. Generally
the windings are made of copper.
Working
Let N1 – number of windings in primary
N2 - number of windings in secondary
Primary winding is connected to a sine voltage V1.
A working flux of ф webers is set up in the magnetic core. The flux is alternating in nature.
When this flux in the primary is linked to the secondary windings, an emf is induced in them.
The emf induced in the primary is self induced emf and that induced in the secondary is
mutually induced emf.
Induced voltage in primary = E1
Induced voltage in secondary = E2
Let
Current in primary = I1
Current in secondary = I2
Transformer ratio
k=
Induced emf is proportional to the number of turns.
In any transformer
Primary ampere turns = secondary ampere turns
N1 I1 = N2 I2
= = =
=k
When any load is connected, primary draws a current in order to keep the working flux constant.
From Faraday’s law of electromagnetic induction,
E2 = -
= -N2
46
E1 =
=
= -N1
= k,
Where k is turn ratio or transformer ratio.
DC Generator
Principle
Generator is a dynamic machine in which mechanical energy is converted into electrical energy.
It operates on the principle based on the Faraday’s law of electromagnetic induction. The emf
generated is dynamically induced emf.
Basic requirements
a) A steady magnetic field
b) A conductor capable of carrying current conductor to move in magnetic field
Working principle
Here a steady magnetic field is produced by pole pieces of a magnet N and S. A single turn coil
ABCD is placed in the field produced between the pole pieces. The coil is rotated by means of a
prime mover. As per Faraday’s law, emf is induced. This bidirectional induced emf is made
unidirectional using a commutator.
Construction
The generator is divided into two parts as
Stator - Yoke (frame)
Main field system
Brushes
47
Rotor - Armature
Commutator
Yoke/frame
-
Outermost solid metal part of the machine
-
Forms part of magnetic circuit and protect all inner part from mechanical
damage.
Field system
-
Consist of main field poles and field windings
-
Suitable magnetic material with high permeability and low hysteresis loss
-
Poles in the form of horse shoe (for uniform flux distribution)
Brushes
-
Made of carbon/graphite
-
Fixed in such a way that they are always in gentle touch with the revolving
armature.
-
Generator is connected to external circuits by means of these brushes.
48
Armature
-
Form of a laminated slotted drum
-
Slots are cut axially (i.e.) parallel to the shaft.
-
In these slots are embedded armature conductors.
-
All conductors are series connected to form a single armature windings
-
Armature windings may have two or more parallel paths depending on the
type of windings.
Two ways of armature windings
1. Wave windings: No. of parallel paths formed between the armatures
terminals is two irrespective of no. of poles.
2. Lap windings: No. of parallel paths is equal to number of poles (any
number).
Emf equation
Let,
p – no. of poles
ф – flux/pole (wb)
z – total number of armature conductors
A – no. of parallel paths
A=z; A=p.
N- speed of rotation of armature (rpm)
Eg – emf induced across armature terminals.
From Faraday’s laws
Avg. induced emf =
Here
dф = pф (wb)
dt =
e=
(sec)
=
volt
No. of conductors connected in series in 1 parallel path =
Eg =
49
DC MOTOR
Principle : when a current carrying conductor capable of a free movement is placed in a
magnetic field, it experiences a mechanical force and begins to move in a direction given by
Flemings’s left hand rule. An electric motor is a machine which converts electrical energy into
mechanical energy. When it works on direct current, it is called DC motor.
Construction
It consists of a rectangular coil ABCD, called armature, situated between the poles of a
permanent magnet or electromagnet. The ends of a coil are connected to a commutator consisting
of two split rings R1 and R2. The armature is capable of rotating about an axis.
As the armature rotates, the two split rings make contact alternatively with the copper brushes B1
and B2.
The coil and the brushes are adjusted in such a way that when the plane of the coil becomes
perpendicular to the magnetic lines of force, their contact with the segments gets reversed.
Current is passed through the armature from a battery.
Working
Let the plane of the coil be parallel to the field and the direction of current through the coil is
along ABCD. The coil carrying current experiences a torque as it is in a magnetic field.Because
of this, the section CD moves up and AB moves down. Thus it begins to rotate in anticlockwise
direction. The torque on the coil of N turns, carrying a current I placed in a magnetic field B and
enclosing an area A is given by
τ = INAB sin θ
where θ is the angle which the normal to the plane of the coil makes with the direction of
magnetic field. As the coil rotates, the torque goes on decreasing and becomes zero, when the
50
coil is perpendicular to the lines of force. But the coil is able to cross this position due to its
inertia. As soon as half a rotation is completed, the segment R1 comes in contact with B2 and
segment R2 with B1. So current is reversed (i.e.) along DCBA. Again the coil experiences a
torque and hence rotation is continued in the same direction.
Back EMF
As the coil rotates, magnetic flux through it changes and an induced emf E is produced. It
opposes the applied potential difference V. It is called back emf. Current flowing in the coil is
reduced and is given by
I=
R - resistance of armature circuit.
At low speeds, the back emf E is small compared to armature current I, which is large.
Sometimes I is so large sufficient enough to damage the armature windings. This
is prevented by inserting a variable resistance called starter, in series with the armature.
Efficiency of a motor
Input power = VI
Heat losses of motor = I2 R
Output power = input – loss
= VI – I2 R
= I(V- IR)
=IE
Efficiency η =
=
=
η=
For maximum output power
E I = maximum
E
-
= maximum
Diff w.r.to. E
-
= 0.
= maximum
51
V= 2E
E=
Hence for maximum output power, back emf must be half of applied potential.
Magnetic effect of electric current
When an electric current flows through a conductor, magnetic field is set up all along the
conductor’s length. Magnetic lines of force are in the form of concentric circles around the
conductor. The direction of lines of force depends upon the direction of current. It may be
determined by any one of the following rules:
Right hand gripping rule
Hold the conductor in the right hand with the outstretched thumb pointing in the direction of
current. Then the other fingers point in the direction of the magnetic field around the conductor.
Right hand cork screw rule
The direction of the magnetic field is in the direction of rotation of a right handed cork screw
turned so as to advance along the wire in the current direction.
Current carrying conductor in a magnetic field
Consider a current carrying conductor placed at right angles to magnetic field as shown in
figure.
Let
I-current
l-effective length
B-flux density
The conductor experiences a force which acts in a direction perpendicular to both field and
current.
Force F=BIl
52
This relation holds good when the conductor and magnetic field are at right angles. For an
inclination θ,
F= BIl sin θ
Direction of the force is given by Fleming’s left hand rule.
Faraday’s laws and Lenz’s law.
Faraday’s law
Whenever the magnetic flux linking a circuit changes, an emf is always induced in it. The
magnitude of such an emf is proportional to the rate of change of flux linkage.
Lenz’s law
Any induced emf will circulate a current in such a direction so as to oppose the cause
producing it.
So an emf is induced in the coil only when there is a change of flux linkages with the
coil. Stationary flux cannot induce any emf in a stationary conductor.
Let,
N-no. of turns in the coil
ф1-initial flux linked in the coil
ф2-final flux
t-time taken for creating changes in flux
flux linkage is the product of number of turns and the flux linking the coil.
Initial flux linkage = N ф1
Final flux linkage = N ф2
Magnitude of average induced emf
E=
=
=
=N
Incorporating Lenz’s law
e= - N
Direction of induced emf is given by Fleming’s right hand rule.
53
Motion of conductor (thumb)
Field (fore finger)
EMF
(middle finger)
Induced EMF : An emf is induced in a coil or conductor whenever there is a change in flux
linkages. Change in flux linkages can be brought in following two ways
(1) The conductor is moved in a stationary magnetic field in such a way that there is a
magnitude change in flux linkages. This type of induced emf is known as dynamically
induced emf.
(2) The conductor is stationary and the magnetic field is changes. This is called statically
induced emf.
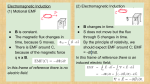
Dynamically induced emf:
Consider a stationary magnetic field of flux density B. In this field, a conductor with
circular cross section is placed. Let the conductor be moved in a direction perpendicular to the
field at a time dt sec.
effective length of the conductor =l
The distance moved = dx
area swept by moving conductor =l dx
magnetic flux linked Ψ= l dx B
for one turn, Ψ = 1 x l dx B
Rate of change of flux linkages
=
From Faraday’s law, emf induced e=
E=Blv
where v-
- linear velocity
Direction of induced emf is obtained by Fleming’s right hand rule.
Let the conductor be moved with same velocity v in an inclined direction making an
angle θ to the direction of field.
54
Statically induced emf
Here the conductor is held stationary and magnetic field is varied.
Consider two coils A and B wound over a magnetic specimen. Coil A is energized using a
battery of strength E. Let a steady current I flow through A. It produces a flux ф.
Assume all flux linked from A to B. When current is reduced to zero, emfs are induced in A and
B. This emf is known as statically induced emf.
Classification
Self induced emf
If a single coil carries a current, a flux will be set up in it. If the current changes, the flux will
also change. This change in flux will induce an emf, which is known as self induced emf.
e=N
(emf induced in same circuit as to oppose any change of flux)
Mutually induced emf
It is the emf induced in one circuit due to change of flux linking it. The flux being
produced by current in another circuit.
M=
M=
Self and mutual induction.
Self inductance (L)
Self inductance of a circuit is the flux linkages per unit current in it.
L=
Consider a magnetic circuit
Henry
55
Flux (ф)
Let,N- no. of turns
I-current
l-length
a-cross sectional area
µr – relative permeability
magnetizing force
H=
=
Magnetic flux density
B=µ0 µr H = µ0 µr
Magnetic flux
ф=Ba =
a
Flux linkage N ф =
a
Self inductance
L=
=
a
=
a
=
=
=
Relation between self induced emf and self inductance
Induced emf e=-N
L=
LI=Nф
For small current di, let the flux linked be dф
L di = N dф
56
L
-L
=N
= -N
e=-L
where L=
Self induced emf is directly proportional to rate of change of current in the same circuit. L is self
inductance or coefficient of self induction.
Mutual inductance (M)
Mutual inductance between two circuits is defined as the flux linkages of one circuit per
unit current in other circuit.
M=
M=
Let
N1 – no. of turns in coil 1
N2 – no. of turns in coil 2
l - length of magnetic circuit
a – cross sectional area
µr – relative permeability
I1 – current in coil 1
- magnetic flux produced by I1
=
=
Assume that all the flux
Flux linkage in coil 2 is
Ψ21 =
M=
=
links the entire coil 2
57
Relation between M and induced emf
Mutually induced emf in coil 2
Em2 =
=
em2 = -N2
M=
M I1=N2ф1
M
= N2
-M
= - N2
em2 = - M
Similarly emf in coil 1
em1 =- M
Coefficient of coupling (k) between two magnetically coupled circuits
Let I2 –magnetic current in coil 2
ф2 – flux due to I2
There will be mutual flux linkages when both the coils are energized.
Let a fraction of flux ф1, say k1 ф1 linked in coil 2.
Flux linkage of coil 2 is
Ψ21 = N2
M=
=
=
(ф=
x
M=
,
)
s=
Let a fraction of flux ф2 say k2 ф2 is linked to coil 1
Flux linkage
Ψ12 = N1
58
M=
=
=
x
M=
M2 = k1k2
= k2
M2 = k2 L1L2
B-H curve for a magnetic material.
The lagging of the intensity of magnetization M (or magnetic induction B) behind the
magnetizing field H is known as hysteresis.
The energy required to magnetize a
specimen is not completely recovered
when the magnetizing field is turned off.
Since the magnetization does not become zero. To tear them out completely, a coercive force in
reverse direction has to be applied.
Thus there is a loss of energy in taking a ferromagnetic material through a cycle of
magnetization. This loss of energy is called hysteresis loss and appears as heat.
Energy losses
There are two types of losses as copper loss and iron loss
Iron or core losses: These losses are produced by the alternating flux in the core and
consist of hysteresis loss and eddy current loss.
Hysteresis loss : The lagging of the intensity of magnetization M (or magnetic induction
B) behind the magnetizing field H is known as hysteresis. This loss of
59
energy is called hysteresis loss and appearsas heat.
Hysteresis loss is proportional to
Bm – magnetic flux density,
Where,
f-frequency,
n-Steinmety constant.=1.6 to 2.
Eddy current loss:
When an ac current is made to flow through a circuit coil, an oscillating flux is set up
through the metal, carrying the coil, since the flux keeps changing; an emf is induced through the
core. This induced emf similar to other emfs induced, causes circular current within the coil.
Such circular currents are called eddy currents.Such currents cause unwanted heating in
transformers.
Eddy current loss is proportional to
Where,
Bm – magnetic flux density,
f-frequency,
n-Steinmety constant.=1.6 to 2.
t-thickness of lamination.
Copper losses : These are the losses due of ohmic resistances of the transformer
windings.
Copper loss is directly proportional to
or
.
Thus if the output is reduced to half, the copper loss reduced to (1/2)2 i.e. one fourth.
60
UNIT IV – Measuring Instruments
Indicating instrument
These instruments make use of dial and pointer for allowing or indicating magnitude of unknown
quantity. Examples are ammeter and voltmeter.
Recording instrument
These instruments give a continuous record of the given electrical quantity which is being
measured over a specific period. Examples are various types of recorders.
Integrating instrument
These instruments measure the total quantity delivered over a period of time. Example is
household energy meter.
Deflecting torque.
This torque acts on the moving system of the instruments to give the required deflection. The
magnitude of the deflecting torque produced is dependent on the quantity to be measured.
Controlling torque.
This torque always present in the system and opposite to the deflecting torque.
Damping torque.
This torque is produced only when the instrument is in operation. This ensures that the moving
system takes just the required time to reach its final deflected position.
Rotating torque
In induction type energy meter, a torque is exerted when the disc is in rotation due to the
interaction between the sets of fluxes and the eddy currents. This is known as rotating torque.
Braking torque
The induced currents interact with the permanent magnetic flux and produce the braking torque.
The braking torque opposes the rotating torque.
61
Difference between moving coil instrument and moving iron instrument.
Moving coil instrument
Moving iron instrument
1. Moving coil instruments are used to
1. Moving iron instruments are used to
measure dc current and voltage
2. A
moving
coil
measure ac and dc current and
measuring
instrument has a coil attached to the
voltage.
2. A
indicator, surrounded by a magnet.
moving
iron
measuring
instrument has a magnet attached to
the indicator, surrounded by a coil.
Classification of measuring instruments.
Depending on quantity measured.
(eg) voltmeter, ammeter, wattmeter, energymeter and ohmmeter
Depending on the different principles used for their working
(eg) moving iron type, dynamometer and induction type
Depending on how the quantity is measured
(eg) Deflecting type, integrating type and recording type
Operating principle of moving iron instruments
The soft iron piece gets magnetized when it is brought into a magnetic field produced by a
permanent magnet.
Attractive type moving iron instrument
When the soft iron piece is brought near either of the ends of a coil carrying current, the iron
piece is attracted towards that portion where the magnetic flux density is more.
Repulsive type moving iron instrument
Two iron pieces kept with close proximity in a magnetic field get magnetized to the same
polarity. Hence a repulsive force is produced. If one of the two pieces is made movable, the
repulsive force will act on it and move it on to one side.
Eddy current damping
A thin disc of conducting but non-magnetic material (copper or aluminium) is mounted on the
spindle. A permanent magnet is used to produce the required magnetic flux. The disc cut the
magnetic flux when it is in motion. Eddy currents are formed and so the required damping torque
is produced. This is called eddy current damping
62
Use of brake magnet in energy meter
Brake magnet is a permanent magnet. Aluminium disc is in the gap between the pole pieces of
permanent magnet. When the aluminium disc rotates, it cut the magnetic flux produced between
the magnet.
Instruments used to measure ac current and voltages.
Moving iron instruments, induction type energy meter and electrodynamometers are used to
measure ac current and voltages.
Instruments used to measure dc current and voltages.
Permanent magnet moving coil instruments
Instruments whose output is linear with input.
Induction type energy meter and linear variable differential transformer (LVDT)
Instruments whose output is non-linear with input.
Moving iron instruments
Transducer
A transducer is defined as devices that convert one form of energy into another form
Photo voltaic transducer
A photovoltaic transducer is a light sensitive semiconductor device, produces a voltage when
illuminated which may be used directly to supply small amounts of electric power.
Photo electric transducer
This is an optoelectronic or optical transducer. It uses a phototube and a light source separated by
a small window whose aperture is controlled by force summing device.
Piezoelectric transducer
A symmetrical crystalline material such as quartz produces an emf when they are placed under
stress. This property is used in piezo electric transducers.
Different types of transducers
Transducers may be classified according to their application, method of energy conversion,
nature of output signal and so on. They may also be classified as (i) active and (ii) passive
transducer. Active transducer is known as self generating type. Examples are thermocouple,
piezoelectric transducer, photovoltaic transducer etc. Passive transducer is known as externally
powered transducers. Examples are photoconductive cell, Linear Variable Differential
Transformer (LVDT), devices using Hall effect.
63
Hall Effect
When a transverse magnetic field B is applied to a metal or a semiconductor carrying a
current I, an electric field E is induced in the direction perpendicular to both I and B. This
phenomenon is called as Hall effect.
Applications of Hall Effect
(i)
It is used to determine whether the material is p type or n type semiconductor.
(ii)
It is used to find the carrier concentration
(iii)
It is used to find the mobility of charge carriers
(iv)
It is used to determine the sign of the current carrying charges
(v)
It is used to design magnetic flux meters and multipliers
(vi)
It is used to find the power flow in the electromagnetic wave.
Basic requirements of transducers
(i)
Ruggedness: It should be capable to withstand overloads
(ii)
Linearity: Its input-output characteristic should be linear
(iii)
Repeatability: It should give same output for the same input, if applied again
and again
(iv) High output quality: The output should have high signal noise ratio
(iv)
No hysteresis : It should not give any hysteresis effect, when varied from low to
high value or vice-versa
Strain gauge & its types.
It is a passive transducer that uses the variation in electrical resistance in wires to sense
the strain produced by a force on the wires.
Types
Electrical strain guage
Unbonded strain guage
Bonded wire strain guage
Gauge Factor.
Gauge factor (GF) or strain factor of a strain gauge is the ratio of relative change in
electrical resistance to the mechanical strain ε, which is the relative change in length.
G=
strain =
64
= absolute change in length
L= original length
ΔR = change in strain gauge resistance
R = unstrained resistance of strain gauge
LVDT and its application.
It is a type of passive transducer which is used to find the inductance. LVDT is
commonly used for position feedback in servomechanisms, and for automated
measurement in machine tools and many other industrial and scientific applications.
Wattmeter
The wattmeter is an instrument for measuring the electric power (or the supply
rate of electrical energy) in watts of any given circuit. Electromagnetic wattmeters are
used for measurement of utility frequency and audio frequency power; other types are
required for radio frequency measurements.
Permanent Moving Coil Instruments
Principle
A current carrying coil is placed in a magnetic field; a force is exerted on the coil and moves it
away from the field. This movement of the coil is used to measure current or voltage.
Construction
In this instrument, a coil is suspended in a magnetic field of a permanent magnet in the shape of
a horse shoe. The coil is suspended so that it can rotate freely in the magnetic field. The figure
shows a permanent horse shoe magnet with soft iron pole pieces attached to it. Between the pole
pieces is a cylinder of soft iron which serves to provide a uniform magnetic field in the air gap
between the pole pieces and the core.
The coil is moved on a light metal frame and is
mounted so that it can rotate freely in the air gap. The pointer attached to the coil moves over a
graduated scale and indicates the angular deflection of the coil, which is proportional to the
current flowing through it.
65
Working:
When current flows in the coil, the developed torque causes the coil to rotate. This is balanced by
a mechanical torque of control springs attached to the movable coil. The balance of torque and
therefore the angular position of the movable coil are indicated by a pointer against a fixed
reference (scale).
Torque is given by
τ = BAIN
where, B-flux density
A-effective coil area
N-Number of turns of wire of the coil
I-current
From the above equation, the number of turns and flux density are constant. Hence torque
developed is a direct indication of the current in the coil. The pointer deflection can therefore be
used to measure current.
Permanent Magnet Moving Iron Instrument
Moving iron instruments are used mainly to measure current or voltage. There are two types of
moving iron instruments.
(i)Attractive type
When a soft iron piece is brought near either of the ends of the coil carrying current it gets
magnetized. The iron piece is attracted towards that portion where the magnetic flux density is
more. This movement of the soft iron piece is used to measure the current or voltage which
produces magnetic field.
66
The figure shows attraction type moving iron instrument. The instrument consists of a coil or
solenoid and an oval shaped iron. The oval shaped iron is pivoted in such a way that it can move
in and out of the solenoid. To this iron, a pointer is attached. The pointer deflects along with the
moving iron over a graduated scale.
To measure the current, the current is passed through the solenoid. A magnetic field inside the
solenoid is set up such that it magnetizes the iron and attracts towards the coil. These instruments
have spring control and damping. The instantaneous deflecting toque is proportional to the
square of the current.
(ii) Repulsion type
It consists of a stationary coil of many turns which carries the current to be measured. Two iron
vanes are placed inside the coil. One vane is rigidly attached to the coil frame; the other is
movable vane which rotates freely. A pointer is attached to the movable vane.
67
The current through the coil magnetizes both the vanes with the same polarity. The two
magnetized vanes experience a repelling force, and since only one vane can move, its
displacement is an indicator of the magnitude of the coil current. The deflection will always be in
the same direction, since there is always repulsion between the fixed and movable vane. The
instruments have spring control system and damping.
Single phase energy meter
Energy meter is an integrating meter. It gives the quantities of electrical energy
consumed over a specified period.
Principle: When a conducting metal part is placed in an magnetic field, eddycurrents are
induced in the metal part. The magnetic flux produced by these eddy currents are made to
interact with another magnetic field. Thus the required operating torque is produced.
Construction
M1 – Shunt magnet. The coil over this carries a current proportional to the
system voltage
M2 – series magnet. The coil carries a current proportional to the system
current
AL – Aluminium Disc connected to the spindle (sp)
M3 – Brake magnet. This is a permanent magnet. It is arranged in such a way
that the aluminium disc is in the gap between the pole pieces ofm3. Due
to this, when in rotation, aluminium disc cut the permanent flux.
68
Working
Rotating torque:
The current in the shunt magnet produces a flux which in turn produces eddy current in the disc.
Similarly the current in the series magnet set up a flux which produces current in the disc.
Due to interaction between the flux and eddy current, a torque is exerted on the disc and the disc
is put into rotation. Such a torque continuously exerted and the disc rotates as long as the
instrument is connected to the supply. This torque is called rotation torque and is proportional to
the power consumed. Thus energy is recorded.
Braking torque
This is similar to damping torque when in rotation, the aluminum disc cuts the magnetic flux
produced by the brake magnet. Hence the induced current interacts with the permanent magnetic
flux and produces braking torque.
According to Len’s law, the breaking torque opposes the rotating torque. The aluminium disc
attains a steady speed when the braking torque balances the rotating torque. The instrument has a
suitable registering mechanism by which energy consumption is recorded.
LVDT: It consists of a single primary winding P1 and two secondary windings S1 and S2 wound
on a hollow cylindrical former.
The secondary windings have an equal number of turns and are identically placed
on either side of the primary windings. The primary winding is connected to an AC
source.
A movable soft iron core slides within the hollow former and therefore affects the magnetic
coupling between the primary and the two secondary.
69
The displacement to be measured is applied to an arm attached to a soft iron core. When the core
is in its normal (null) position, equal voltages are induced in the two secondary windings.
Let the output voltage of secondary winding S1=ES1 and S2=ES2
To convert the outputs of S1 and S2 into a single voltage signal, S1 and S2 are connected in series
opposition.
Hence output voltage E0 = ES1~ ES2
In null position, fluxes linked are equal and hence equal emfs are induced.
ES1= ES2 , E0 =0.
If core is moved to left side of null position, more flux is linked with S1 when compared to S2.
ES1> ES2
Magnitude of output voltage is
ES1- ES2, in phase with ES1
If core is moved to right side
ES2> ES1
E0 = ES2 – ES1 in phase with ES2.
Amount of voltage change is proportional to amount of movement of the core.
Hence we have indication of the amount of linear motion. Amount of output
voltage is measured to determine the displacement. Output is a linear function of core
displacement.
Hall Effect transducer
When a transverse magnetic field B is applied to a metal or a semiconductor carrying a
current I, an electric field E is induced in the direction perpendicular to both I and B. This
phenomenon is called as Hall effect.
Assume the material as n type semiconductor; the current flow consists of
electrons moving from left to right. If ‘v’ is the velocity of electrons experiences a
downward force and are deflected in downward direction in a magnetic field B,
70
eEH = Bev
EH = RH Jx B
Jx = nev; RH =
The negative sign indicates the direction of electric field along negative y
direction.
Hall voltage is
VH = EH t
VH = RH Jx B
VH = RH B t
VH = RH B
The output voltage is the Hall voltage.
Electrodynamometer
An electrodynamometer is an instrument used for measuring the electric power. When the same
current passes through two concentric coils placed at right angles to each other, the resulting
torque depends on the square of the current.
71
The stationary coil is made of relatively few turns of heavy wire and is connected in series with
the circuit. The rotating coil consists of many turns of fine wire, and is connected across the load
with a multiplier resistance in series with it to measure the potential drop.
If a current is passed through the fixed coil and movable coil are in series with one another. The
movable coil tends to displace itself so as to bring the axes of the coils into the same direction.
This tendency can be resisted by giving a twist to the torsion head and so, applying a restoring
torque to the movable coil through the spring, which opposes the torque due to the dynamic
action of the currents. If then the torsion head is provided with an index needle, and also if the
movable coil is provided with an indicating point, it is possible to measure the torsional angle
through which the head must be twisted to bring the movable coil back to its zero position. In
these circumstances, the torsional angle becomes a measure of the torque which is the product of
the strengths of the currents in the two coils.The currents through the two coils are I and it is
proportional to V.The product of the two currents is proportional to the power dissipated in the
load.
Uses
1. Used as ammeter-measuring ac and dc current
2. Used as voltmeter-measuring ac and dc voltage
3. Used as wattmeter-measuring power
Photoelectric transducer
This is an optoelectronic or optical transducer. It uses a phototube and a light source separated by
a small window whose aperture is controlled by force summing device. The quantity of incident
light on the photo sensitive cathode is varied according to the external applied force there by
changing the anode current.
72
Piezoelectric transducer
Piezoelectric effect
When a pair of opposite faces of certain crystal such as quartz is subjected to
pressure, opposite electric charges are developed in the other pair of opposite faces.
A symmetrical crystalline material such as quartz produces an emf when they are
placed under stress. This property is used in piezoelectric transducers. When a crystal is
placed between a solid base and the force summing device.
An externally applied force entering the transducer through its pressure port, applies
pressure to the top of the crystal. This produces an emf across the crystal proportional to
the magnitude of applied pressure.
The device needs no external power source and it therefore self generating
Output voltage is E =
Photovoltaic transducer
Where, Cp is capacitance and Q is charge.
73
A photovoltaic transducer is a light sensitive semiconductor device, produces a
voltage when illuminated which may be used directly to supply small amounts of electric
power. The voltage increases as the intensity of light falling on the semiconductor
junction of this cell increases.
It consists of a piece of semiconductor material which is bonded to a metal plate.
Photovoltaic transducers are used in the low power devices such as light meters.
Ammeter
Ammeter is an electrical measuring device, which is used to measure electric current through the
circuit. Its symbol is
The two coils are electrically in series. They carry the current to be measured. The deflecting
torque is proportional to (current)2. Hence the instrument can be used for measuring dc and ac.
Voltmeter
Voltmeter is an electrical measuring device, which is used to measure potential difference
between two points in a circuit. Its symbol is
The two coils are electrically in series. They carry a current proportional to the voltage to be
measured. The deflecting torque is proportional to (voltage)2.Hence the instrument can be
used for measuring dc and ac voltages.
74
UNIT V- Basics of Power system
Electric power : Electric power is the rate at which electric energy is transferred. Electric power
is commonly expressed in megawatts (MW) . A megawatt (MW) is one million watts.
The electric power P is equal to the energy consumption E divided by the consumption time t
P=
,
Where P is the electric power in watt (W), E is the energy consumption in joules (J)
t is the time in seconds (S).
Thermal power : The thermo power, or thermoelectric power (also called the Seebeck
coefficient) of a material is a measure of the magnitude of an induced thermoelectric voltage in
response to a temperature difference across that material. The thermo power has units of volts
per Kelvin (V/K), although it is more often given in micro volts per Kelvin (μV/K).
Hydro power : Hydro power is the power generated by the potential energy of water at a certain
height from ground.
Wind power is the conversion of wind energy into a useful form of energy, such as using wind
turbines to make electrical power, windmills for mechanical power, wind pumps for water
pumping or drainage, or sails to propel ships.
Solar power is the conversion of sunlight into electricity, either directly using photovoltaic
(PV), or indirectly using concentrated solar power (CSP). Concentrated solar power systems use
lenses or mirrors and tracking systems to focus a large area of sunlight into a small beam.
Photovoltaic convert light into electric current using the photoelectric effect.
Solar energy is defined as the energy produced by the sun and collected on earth. The heat
continues to remain in the sun and has the ability to maintain thermo nuclear reaction.
Electric generator : In electricity generation, an electric generator is a device that converts
mechanical energy to electrical energy. The source of mechanical energy may be a reciprocating
or turbine steam engine, water falling through a turbine or waterwheel, an internal combustion
engine, a wind turbine, a hand crank, compressed air, or any other source of mechanical energy.
Generators provide nearly all of the power for electric power grids.
Some methods of generating electricity.
1. Steam turbine
2. Gas combustion turbine
3. Water turbine
4. Wind turbine
75
5. Internal combustion engines
6. Thermal
7. Solar
8. Biomass
Conventional energy source:
solids : coal, uranium
liquids : petroleum
Gases fuels: Natural gas
Non conventional energy sources
Tidal power
Wind power
Geothermal energy
Solar energy
Wave power
Magneto hydro dynamic (MHD) generation
Biomass & Bio fuel
Power plant : A machine or assemblage of equipment that produces and delivers a flow of
mechanical work and electrical energy is a power plant.
Types of conventional power plant:
1. Hydro power plant
2. Steam power plant
3. Nuclear power plant
4. Gas turbine power plant
Advantages of utilizing renewable energy sources
a) Locally available and everlasting
b) Conversion process does not involve in emission of green house gases
c) Power generation is at local level and does not involve in T&D losses
d) System are modular in nature
Primary transmission system: The powers generated at the generating stations are transmitted
at higher voltage to the main load centers. This transmission system is known as primary
transmission system. The voltage level here may be 1500 KV, 700KV, 400KV, or 230KV
76
Secondary transmission system:The power from the main load centers is transmitted to
different sub load centers at voltages 33KV, 66KV or 110KV. This part of transmission is
known as secondary transmission systems.
Primary distribution system:
The power is distributed through the 11Kv lines, which runs along the main roads. This
distribution system is referred to as primary distribution system.
Secondary distribution system:
From the distributor, power is supplied to the consumers by means of lines called service lines
combined, form the secondary distribution system.
Feeders: The line feeding the power from the distribution transformer to the distributors is
called feeders.
Distributors: The power is distributed through distribution lines, which run along all the streets.
This distribution line is called a distributor.
Thermal power plant
A thermal power station comprise all of the equipment and systems required to produce
electricity by using a steam generating boiler fuel with fossil fuels or bio fuels to drive an
electrical generator .
Electrical generator is a device that converts kinetic energy to electrical energy generally using
electromagnetic induction. The reverse conversion of electrical energy in to mechanical energy is
done by a motor.
Working
In a thermal power plant, coal, oil or natural gas is used to heat the boiler to covert the water
into steam. The steam is used to turn a turbine, which is connected to a generator. When the
turbine turns, electricity is generated and given as output by the generator, which is then supplied
to the consumes through high voltage power lines
77
Process:
1. Water intake: Firstly, water is taken into the boiler through a water source, if water is
available in plenty, then source is an open pond or river. If water is scarce, then it is recycled and
the same water is used over and over again
2. Boiler Heating: The boiler is heated with the help of oil, coal or natural gas. A furnace is used
to heat the fuel and supply the heat produced to the boiler. The increase in temperature helps in
the transformation of water into steam.
3. Steam Turbine: The steam generated in the boiler is sent through a steam turbine. The
turbine has blades that rotate when high velocity steam flows across them. This rotation of
turbine blades is used to generate electricity.
4. Generator: A generator is connected to the steam turbine. When the turbine rotates, the
generator produces electricity which is then passed on to the power distribution system.
5. Special mountings: It consists of economizer and air pre heater. An economizer uses the heat
from the exhaust gases to heat the feed water. An air pre heater heats the air sent into the
combustion chamber to improve the efficiency of the combustion process.
6. Ash collection system: There is a separate residue and ash collection system in place to
collect all the waste materials from the combustion process and to prevent them from, escaping
into the atmosphere.
Apart from this, there are various other monitoring systems and instruments in place to keep
track of the functioning of all the devices. This prevents any hazards from taking place in the
plant.
Main parts of the plant are:
1. Coal conveyor
78
2. Stoker
3. Pulverize
4. Boiler
5. Coal Ash
6. Ash Air pre heater
7. Smoke stack
8. Turbine
9. Condenser
10. Transformer
11. Cooling towers
12. Generator
13. High voltage power lines
14. Electrostatic precipitator
Coal conveyor is a belt type arrangement. With this, coal is transported from coal storage
place in power plant to the place near the boiler. The coal which is brought nearby boiler has to
put in boiler furnace for combustion. Thus the stoke is formed in boiler furnace for combustion.
This stoke is a mechanical device for feeding coal to furnace. A pulverize is a device for grinding
coal for combustion which is furnace in the plant. Boiler is an enclosed vessel in which water is
heated and circulated until the water is turned in to steam at the required pressure. Steam after
rotating steam turbine comes to condenser. Condenser refers to shell and tube heat exchanges
installed at the outlet of every steam turbine. These condensers are heat exchangers which
convert steam from its gaseous to its liquid state, the condensate formed in the condenser after
condensation is initially at high temperature. This hot water is passed to cooling towers, which
serves as heat sink. Electrostatic precipitators remove dust or other finely divided particles from
fuel gases by charging the particles inductively with an electric field, then attracting them to
highly charged collector plates.
Advantages:
1. Quick response to rapidly changing loads without difficulty
2. Easy to locate
3. Steam engines and turbines can work under 25% of overload continuously.
4. Fuel used is cheaper
5. Portion of steam can be used for different industries also.
79
Disadvantages:
1. Takes long time for erection and action
2. Large quantity of water required
3. Maintenance and operating cost are high
Hydro power plant
Flow of water represents a huge supply of kinetic energythat can be put to work. Water wheels
are used for generating mechanical energy. Hydro electric plants are very different. They use
mode turbine generators to produce electricity just as thermal power plants do.
Working:
A hydro plant uses the force of falling water to make electricity. It consists of
1. An electric plant
2. A dam
3. A reservoir
To make electricity, a dam opens. It gates to allow water from the reservoir to flow through a
large tube called a penstock. At the bottom of the penstock, the fast moving water spins the blade
of a turbine. The turbine is connected to a generator to produce electricity. The electricity is then
transported via huge transmission lines to a local utility company.
The amount of electricity that can be generated at a hydro plant is determined by 2 factors: Heat
and flow. Heat is the distance from the highest level of the dammed water to the point where it
goes through the power producing turbine. Flow is how much water moves through the system.
A dam serves two purposes at a hydro plant. First, a dam increases the head or height of a
water fall. Second, it controls the flow of height. Dam stores water. Near bottom of the dam wall,
there is water intake. Gravity causes it to fall through the penstock inside the dam. At the end of
the penstock there is a turbine propeller, which is turned by the moving water. The shaft from
turbine goes up into the generator which produces the power. Power lines are connected to the
generator that carries electricity.
80
Reservoir
Generator
turbine
Outflow River
One of the biggest advantages of a hydro plant is its ability to store energy. Water can be stored
in a reservoir and released when needed for electricity production.
Some hydro plants also use pumped storage systems. A pumped storage system operates
similar to public fountain. Same water is used again and again. At a pumped storage hydro plant,
water is used to make electricity and then stored in a lower pool. Depending on how much
electricity is needed, the water may or may not pumped back to an upper pool. Pumping water to
the upper pool requires electricity so hydro plant usually uses pumped storage systems when
there is a big demand for electricity.
Parts of Hydro electric plant:
Most conventional hydro electric plants have 4 major components.
1. Dam – to create water falling and control flow of water.
2. Turbine – To convert kinetic energy of falling water to mechanical energy
3. Generator - converts mechanical energy to electrical energy
4. Transmission lines
81
The amount of electricity produced by a hydro power plant depends on 2 factors
1. How far the water falls
2. Amount of water falling
To calculate power of a dam
Power = height of Dam ×River flow ×efficiency / 11.8 where
(11.8)→ converts units of feet and seconds in Kilowatts
Power→ electric power in Kilowatts
Height of dam → Distance of waterfalls measured in feet
River flow → amount of water flowing in the rive measured in cubic feet /sec
Efficiency → how well the turbine and generator converts the power of falling
Water to electric power.
82
Advantages:
1. Highly reliable
2. Maintenance and operation charges – low
3. Running cost of plant – low
4. No fuel and transportation problem
5. Less time to run and synchronize the plant
6. Used to control flood.
Disadvantages:
1. Initial cost of the plant is high
2. Long time needed for erection of such plants
3. Requires long transmission lines to deliver power.
Generation of electric power from wind energy
A wind turbine is a machine that converts kinetic energy in wind into mechanical energy. If
mechanical energy is used directly by machinery, the machine is called a wind mill. If
mechanical energy is converted to electricity, the machine is called a wind generator.Wind
turbine which is used to generate electricity come in a wide variety of sizes.
Working:
voltage
wind
Aerodynamic
torque
generator
Drive train
Electric
generator
Grid
interface
Power
grid
Electric power
Mechanical
control
Electrical
control
mechanical
protection
electrical
protection
master
controller
83
Generalized wind turbine
A wind turbine converts kinetic energy in a moving air stream to electric energy.
Mechanical torque created by aerodynamic lift from the turbine blades is applied to a rotating
shaft. An electrical generator on the same rotating shaft produces an opposing electromagnetic
torque. In steady operation, the magnitude of the mechanical torque is equal to that of the
electromagnetic torque, the rotational speed remains constant, real power (product of rotational
speed and torque) is delivered to the grid. Since the wind speed is not constant, a variety of
control mechanisms are employed to manage the conversion process and protect the mechanical
and electrical equipment from conditions that would result is failure or destruction.
Wind is merely the movement of air from one place to another. There are global wind patterns
due to the effects of temperature differences between land and seas, or mountains and valleys
wind speed generally increases with height above ground.
The power in the wind is proportional to
1) The area of wind mill being swept by the wind
2) The cube of the wind speed
3) The air density – which varies with attitude
Power =
P =
ρAV3
The actual power will depend on several factors, such as Type of machine
Friction loss
Losses in pump or other equipment connected to wind machine is given by
Ρm =
Cp. ρ .A. V3
Where
Pm -
power ( in watts available from the machine)
Cp – coefficient of performance of the wind machine
Wind machine will only operates at its maximum efficiency for a fraction of the time it is
running, due to variations in wind speed.
Average power output in watts over the year is
ρA = 0,2 AV3
V→ annual wind speed (m/s)
84
Principle of wind energy conversion:
There are two primary physical principles by which energy can be extracted from the wind
through creation of either lift or drag force.
The difference between drag and lift drag forces provide the most obvious means of propulsion,
when compared to lift forces. The basic features that characterize lift and drag are
Drag is in the direction of air flow
Lift is perpendicular to the direction of air flow
Generation of lift always causes a certain amount of drag to be developed.
With a good aerofoil, the lift produced can be more than thirty time greater than
the drag
Lift devices are generally more efficient than drag devices types.
Components of wind energy systems:
Basic components include
A rotor consisting of blades with aerodynamic surfaces, when the wind blow over
the blades , the rotor turns, causing the generator or alternator in the turbine to
rotate and produce electricity.
A gear box, which matches the rotor speed to that of the generator / alternator
An enclosure, which protects the gearbox, generator and other components of the
turbine
A tail vane, which aligns the turbine with the wind.
85
It needs a disconnect switch that can electrically isolate the wind turbine from the rest of the
wind energy system. An automatic disconnect switch necessary to prevent damage to the rest of
the system in case of an electrical malfunction or a lightning strike. It also allows maintenance
and system modifications to be safely made to the turbine. It needs batteries to store excess
energy generated by the wind turbine.
Maintenance: A wind turbine required periodic maintenance such as oiling and greasing and
regular safety inspections. Bolts and electrical connection should be checked periodically wind
turbines should be checked for corrosion.
Safety measures: All wind turbines have a maximum wind speed, called survival speed at which
they will not operate above when winds over this maximum speed occurs, they have an internal
brake and lock to prevent them from going faster than the survival speed.
Generation of electric power from solar power plant
Solar energy:
The total solar energy available to the earth is approximately 4×1024 joules /year.Solar
energy can produce most of the world’s need for energy. Out of all the renewable and non
polluting sources solar power become the most the primary source of commercial power for
everyone in the world.
Solar energy is energy from the sun. This energy, in the form of heat and light, supports all
life on earth, drives the earth’s climate and weather and is predominately responsible for the clan
of resources collectively known as renewable energy.
86
Modern solar technologies continue to harness the sun to provide water heating and day
lighting. Solar panels have no maintenance, no noise and do not harm the environment. The
disadvantage is the cost.
Solar energy is defined as the energy produced by the sun and collected on earth. The heat
continues to remain in the sun and has the ability to maintain thermo nuclear reaction. Solar
heating and solar electric system can now generate thermal and electric energy over their service
life up to 100 times the energy input during their manufacture
Components of solar energy plant:
1. A collector
2. A storage unit
3. Functional solar energy generator
Solar power plant technology:
Solar technology is currently divided into two categories
1. Thermal
2. Photo voltaic
Thermal solar power uses the heat of the sun and photo voltaic (PV), is the technology that
converts its light directly into electricity.
I Solar photo voltaic systems power plants:
These operate on the principle of photo electric phenomenon – direct conversion of light of
electricity. The solar radiation incident upon a silicon based semiconductor photovoltaic
cell
produces direct electric current. Photo voltaic cells are integrated into so called modules with a
voltage of 6- 12V, the electrically interconnected modules form solar systems with the output
voltage of 230V and more.
PV cell: A photo voltaic panel consists of several connected 0.6 V dc PV cells, which are made
out of semiconducting materials, generally monomulti crystalline silicon. The thin layer of
silicon is sandwiched between two metallic electrodes and the cells are usually encapsulated
behind glan to make them weather proof. Multiple PV panels can be then connected to form and
array, capable of providing sufficient power for everything from common electrical applications
like single household electricity.
A solar cell made of multi crystalline silicon, which accounts for most of the PV panels
currently in use and production, coverts sunlight to electricity at about 13.5% efficiency
87
Basic photovoltaic system for power generation
1. Solar array
2. Blocking diode
3. Battery storage
4. Inverter/ converter
5. Appropriate switches and CB
From utility feeder
Blocking
diode
Solar cell array
Inverter/converter
From load
Battery storage
Solar array – converts the insulation to useful DC electrical power.
Blocking diode- lets the array generated power flow only towards the battery of grid without a
blocking diode the battery would discharge back through the solar array during times of no
insulation.
Battery storage - solar generated electric energy is stored.
Inverter / converter – solid state which converts battery voltage to AC frequency and phase to
match that needed to integrate with the utility grid. It may also contain a suitable output step of
transformer.
Switches & circuit breakers: it permit isolating parts of the system, as the battery and to
include breakers and fusing protection between the inverter output and the utility grid to protect
both the photovoltaic system and the grid
Solar concentration thermic power plants:
These operate on the principle of concentrating the sunrays using mirrors into a small area
where the produced high heat is used to generate steam and electricity. Thermal solar energy can
be used for water heating, cooking, drying, water distillation refrigeration etc.
88
Basic types are used to concentrate solar radiation:
Linear parabolic mirrors
Concentrate solar radiation into a tube placed in the reflector focal point. Oil flows over
the tube getting hot up to 400o C,
the heat is used to generate steam and for the turbine
connected to the electric generator.
Plate parabolic mirrors
Concentrate solar radiation into an absorber positioned in the plate focal point oil is heated
and is used to generate steam.
Thermal solar towers
Mirrors are arranged into a circle around the tower, being always turned towards
the sun and concentrating sun rays into a collector placed on the tower.
Advantages:
1. Solar energy is free of pollution
2. The plant requires little maintenance or help after setup
3. Economical
Disadvantages
1. Available only by day.
2. Needs a backup power plant to be kept hot
3. Keeping back up plants hot includes an energy cost which includes burning
4. It can only be used to power transport vehicles by converting energy into another form of
energy.
5. Produce only DC power, which needs to be converted to AC power.
Transmission and Distribution system of electric power
Generation of electric power:
Electric power is an important commodity in all aspects of life. Generation of electric power
is a necessary component for the operation of modern society. Electric power plants generate
electricity and deliver it to consumers through power transmission lines. Outputs of electric
power generated through power plants should be adjusted separately according to electricity
consumed.
89
Electricity generation is the first process in the delivery of electricity to consumers. Other
processes are electric power transmission and electricity distribution. Electrical generators are
devices which transform mechanical energy into electrical energy. To generate electricity,
hydraulic power, thermal power or atomic power is utilized.
Methods of generating Electricity
1. Steam turbine
2. Gas combustion turbine
3. Water turbine
4. Wind turbine
5. Internal combustion engines
6. Thermal
7. Solar
8. Bio mass
Transmission system
The powers generated at the generating stations are transmitted at higher voltage to the main
load centers. This transmission system is known as primary transmission system. The voltage
level here may be 1500 KV, 700KV, 400KV, or 230KV
There are advantages when power is transmitted at high voltages
a)
Volume of conductor material required is low.
b)
For a given amount of power transmitted the current through the line is reduced,
when the transmission system voltage is high. This reduces the line losses and
hence efficiency of transmission is increased.
c)
As the current is reduced the voltage in the line is reduced and hence the time
regulation is improved. The power from the main load centers is transmitted to
different sub load centers at voltages 33KV, 66KV or 110KV. This part of
transmission is known as secondary transmission systems. The primary
transmission system employs over head lines is general. The secondary
transmission of power is either by means of OH lines or underground cable.
When power is transmitted by dc, there are advantages when compared to a.c transmission
systems.
a)
The amount of insulation required is less in dc transmission as compared to that
for ac transmission
90
b)
The size of tower , cross arms required are small
c)
It improves the stability of the system.
d)
Power factor of dc transmission system is unity
e)
There is no changing current.
f)
There is skin effect due to which there is increase in effective resistance of the
line conductors.
Disadvantages of HVDC Transmission:
a)
There is no equipment like a transformer, available for step up or step
down the voltage.
b)
Power cannot be generated at higher voltages because of commutation problem
c)
There are limitations with HVDC switching devices and circuit measures.
HDVC transmission system is more economical when the distance of transmission is more than
600km of OH line.
The component used in a substation for dc transmission purpose are more.
AC
generator
Rectifier
unit
Rectifeir
unit
~
Step up
transformer
HVDC
Transmission
line
Step down
transformer
Distribution system:
The power is received at the sub load centre at voltages of 33kv, 66kv or 110kv. The voltage
level is stepped down to 11kv at the sub load centers. The power is distributed through the 11kv
lines, which runs along the main roads. This distribution system is referred to as primary
distribution system.
Number of 11kv/415v transformers is connected to enroute 11kv lines. Now the power is
distributed through distribution lines, which run along all the streets. This distribution line is
called a distributor. The power is distributed with the help of 3 phase, 4 wire lines or cables.
Voltage levels available are 1phase/230v and 3phase /415v. The line feeding the power from the
distribution transformer to the distributors is called feeders.
91
From the distributor, power is supplied to the consumers by means of lines called service lines.
The feeder distribution and service lines combined form the secondary distribution system. The
distributor may be radial or ring. The secondary distribution of power is by means of ac only.
This is because all the loads are designed to work on ac only, which are most efficient and less in
cost.
AB,BC,CD,
DE,EF,FG are
distribution
sections
Distributors
C
B
From 11KVline
Feeders
Distribution
transformer
11KV / 415V
distribution
Main components of Transmission and Distribution systems.
a)
Conductors which are used to carry the electrical power from one place to another place.
b)
Supports, which may be poles or towers, are used to keep the conductors at proper height
from the ground.
c)
Cross arms, which are attached to the poles or towers for support,
d)
Insulators, which are used to isolate the conductors at higher potential from the ground.
e)
Lightning arresters, ground wires, stay wires etc.
Comparison of over head (OH) and underground (UG) systems.
It is compared based on the following factors.
a)
Public safety: UG preferred as there is less chance of any hazard to the public
b)
Initial cost: OH preferred, as, for UG cost 10 times than that of OH
c)
Flexibility: OH lines system is more flexible than the UG cable system. OH line
system can be modified easily.
d)
Faults: chance of occurrence of fault in an UG cable system is less when compared to
the OH line system , as it is exposed to atmosphere
e)
Appearance: general appearance of UG cable system is better.
f)
Fault location and repair : location and rectification of fault is easier in OH line
92
g)
Useful life: life period of an OH system is only 50% that of UG cable system.
h)
Maintenance cost: This is low for UG
i)
Interference with communication circuits. It is less with an UG cable system and more
with OH line.
Single line representation of power system