Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Computational chemistry wikipedia , lookup
Perturbation theory wikipedia , lookup
Plateau principle wikipedia , lookup
Mathematical physics wikipedia , lookup
Uncertainty principle wikipedia , lookup
Dirac bracket wikipedia , lookup
Renormalization group wikipedia , lookup
Scalar field theory wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
These notes provide two direct paths from classical mechanics to (non-relativistic) quantum mechanics
and back again. The “forward” paths proceed by succinct, step-by-step notes taken from “Classical
Mechanics,” 2nd edition by H. Goldstein, chapters 1, 2, 8, 9, and 10. The “inverse” path is already
detailed out in J. J. Sakurai’s “Advanced Quantum Mechanics,” 2nd edition, chapters 1 and 2. These two
chapters build quantum physics from scratch including the Schrödinger, Heisenberg, and Feynman
formulations. Before digging into Sakurai, I would recommend the notes on infinitesimal generators by
D. E. Soper at http://pages.uoregon.edu/soper/QuantumMechanics/momentum.pdf or at
https://drive.google.com/file/d/0B7rWAlRrr2kkT3R6bElWMl91T00/view?usp=sharing.
Classical mechanics to quantum mechanics: We begin with Hamilton’s principle and the Euler-Lagrange
equations, proceed to Legendre and canonical transformations, and take a brief, optional detour on
action-angle variables and old quantum mechanics. Hamilton-Jacobi theory follows. This theory will
allow us to see mechanics as a geometrical optics limit of a more general wave mechanics. Poisson
brackets are then briefly developed to connect classical mechanics to Heisenberg’s matrix mechanics. An
appendix will point out the excellent treatment by Goldstein of symmetries and conservations principles
that play a fundamental role in particle and field theory.
Hamilton’s Principle and the Euler-Lagrange Equations (chapter 2). Hamilton’s principle describes
motion of mechanical systems for which all forces (excluding forces of constraint) are derivable from a
generalized scalar potential that may be a function of the coordinates, velocities, and time. In the
language of the calculus of variations (or expressed in Variational terms), Hamilton’s principle is
𝑡2
𝛿 ∫ 𝐿(𝑞𝑖 , 𝑞̇ 𝑖 , 𝑡)𝑑𝑡 = 0,
𝑡1
where 𝐿 is difference of the kinetic energy and the potential energy, 𝐿 = 𝑇 − 𝑉. For a single particle, 𝐿
is a function of one generalized coordinate, its velocity, and time, 𝐿 = 𝐿(𝑞, 𝑞̇ , 𝑡). The Euler-Lagrange
equation (via the calculus of variations) is
𝑑 𝜕𝐿
𝜕𝐿
( )−
= 0,
𝑑𝑡 𝜕𝑞̇
𝜕𝑞
where 𝑝̇ =
𝜕𝐿
𝜕𝐿
and 𝑝 = .
𝜕𝑞
𝜕𝑞̇
Differentiating with respect to time we obtain
𝑑𝐿 𝜕𝐿 𝑑𝑞 𝜕𝐿 𝑑𝑞̇ 𝜕𝐿
=
+
+
𝑑𝑡 𝜕𝑞 𝑑𝑡 𝜕𝑞̇ 𝑑𝑡 𝜕𝑡
𝑑 𝜕𝐿
𝜕𝐿 𝑑𝑞̇ 𝜕𝐿
= ( )+
+
𝑑𝑡 𝜕𝑞̇
𝜕𝑞̇ 𝑑𝑡 𝜕𝑡
𝑑
𝜕𝐿
𝜕𝐿
= (𝑞̇ ) + .
𝑑𝑡 𝜕𝑞̇
𝜕𝑡
Therefore
0=
𝑑
𝜕𝐿
𝜕𝐿
− 𝐿] + .
[𝑞̇
𝑑𝑡 𝜕𝑞̇
𝜕𝑡
Let ℎ = 𝑞 ̇ 𝜕𝐿/(𝜕𝑞 ̇ ) − 𝐿. The value of ℎ is identical with the Hamiltonian 𝐻 (to be constructed later).
However, ℎ is a function of the 𝑞 ′ 𝑠, 𝑞̇ ′ 𝑠, and 𝑡, whereas 𝐻 is a function of the 𝑞 ′ 𝑠, 𝑝′𝑠, and 𝑡. Thus ℎ has
𝑛 independent variables requiring 2𝑛 initial conditions for the 𝑞 ′ 𝑠 and 𝑝′𝑠, or for the 𝑞′𝑠 at two distinct
times. It follows that𝑑ℎ/𝑑𝑡 = −𝜕𝐿/𝜕𝑡. If 𝐿 does not explicitly depend on 𝑡, then 𝑑/𝑑𝑡 ℎ(𝑞, 𝑞 ̇, 𝑡) =
0 and ℎ is a conserved quantity. Under certain circumstances ℎ corresponds to the total energy of the
system. See Goldstein, 2nd ed., p. 61.
Legendre Transformations (chapter 8). Let 𝐻 = 𝐻(𝑞, 𝑝, 𝑡), namely, let 𝐻 = 𝑝𝑞̇ − 𝐿(𝑞, 𝑞̇ , 𝑡). Then
𝜕𝐿
𝜕𝐿
𝜕𝐿
𝑑𝑞 −
𝑑𝑞̇ − 𝑑𝑡
𝜕𝑞
𝜕𝑞̇
𝜕𝑡
𝜕𝐿
= 𝑞̇ 𝑑𝑝 + 𝑝𝑑𝑞̇ − 𝑝̇ 𝑑𝑞 − 𝑝𝑑𝑞̇ − 𝑑𝑡
𝜕𝑡
𝜕𝐿
= 𝑞̇ 𝑑𝑝 − 𝑝̇ 𝑑𝑞 − 𝑑𝑡.
𝜕𝑡
𝑑𝐻 = 𝑞̇ 𝑑𝑝 + 𝑝𝑑𝑞̇ −
Then
𝜕𝐻
= 𝑞̇ ,
𝜕𝑝
𝜕𝐻
= −𝑝̇ ,
𝜕𝑞
𝜕𝐻
𝜕𝐿
=− .
𝜕𝑡
𝜕𝑡
The Legendre transformation transformed a Lagrangian in (𝑞, 𝑞̇ , 𝑡) to a Hamiltonian in (𝑞, 𝑝, 𝑡).
1
2
1
2
Example. Let𝐿(𝑞, 𝑞̇ ) = 𝑚𝑞̇ 2 − 𝑘𝑞 2 , the Lagrangian for a spring-mas system. Then
𝐻(𝑞, 𝑝) = 𝑝𝑞̇ − 𝐿
1
1
= 𝑝𝑞̇ − 𝑚𝑞̇ 2 + 𝑘𝑞 2 .
2
2
𝑝=
𝜕𝐿
= 𝑚𝑞̇ ,
𝜕𝑞̇
or 𝑞 ̇ = 𝑝/𝑚. Hence,
𝐻(𝑞, 𝑝) = 𝑝 ∙
𝑝
𝑝2 1 2
𝑝2 1 2
−
+ 𝑘𝑞 =
+ 𝑘𝑞 .
𝑚 2𝑚 2
2𝑚 2
A coordinate, 𝑞, is called cyclic if does not appear in 𝐿 explicitly. If 𝑞 is cyclic, then 𝜕𝐿/𝜕𝑞 = 0. Then
𝑑𝑝/𝑑𝑡 = 0, and 𝑝 is a constant, the “conserved conjugate momentum” to the generalized coordinate 𝑞.
Canonical Transformations (chapter 9). You have likely already seen orthogonal coordinate
transformations such as rotations or Galilean transformations of the form 𝑄 = 𝑄(𝑞, 𝑡). These are known
as point transformations. In Hamiltonian mechanics, the momenta are also independent variables on
the same level as generalized coordinates. We then generalize from invertible point transformations to
invertible transformations of the form:
𝑄𝑖 = 𝑄𝑖 (𝑞𝑖 , 𝑝𝑖 , 𝑡),
𝑃𝑖 = 𝑃𝑖 (𝑞𝑖 , 𝑝𝑖 , 𝑡).
We are only interested in transformations in which the 𝑄 and 𝑃 are canonical coordinates:
𝑄̇𝑖 =
𝜕𝐾
,
𝜕𝑃𝑖
𝑃𝑖 = −
𝜕𝐾
,
𝜕𝑄𝑖
where 𝐾 plays the role of 𝐻 in the new coordinates.
The “proportionality” concept in this paragraph is important. If 𝑄𝑖 and 𝑃𝑖 are canonical, they must satisfy
a modified Hamilton’s principle
𝑡2
𝛿 ∫ (𝑃𝑖 𝑄̇𝑖 − 𝐾(𝑄, 𝑃, 𝑡)) 𝑑𝑡 = 0,
𝑡𝑖
while
𝑡2
𝛿 ∫ (𝑝𝑖 𝑞̇ 𝑖 − 𝐻(𝑞, 𝑝, 𝑡))𝑑𝑡 = 0.
𝑡𝑖
Since the general form of the modified Hamilton’s principle has zero variation at the endpoints, both
statements will be satisfied if the integrands are connected by a relation of the form
𝜆(𝑝𝑖 𝑞̇ 𝑖 − 𝐻(𝑞, 𝑝, 𝑡)) = 𝑃𝑖 𝑄̇𝑖 − 𝐾(𝑄, 𝑃, 𝑡) +
𝑑𝐹
.
𝑑𝑡
𝐹 is any function of the phase space coordinates with continuous second derivatives, and 𝜆 is a constant
independent of the canonical coordinates and the time; 𝜆 is related to scale transformations. When 𝜆 =
1, we have canonical transformations—see Goldstein p. 381 for further details. 𝐹 is called the
generating function of the transformation.
Canonical transformations seek out cyclic coordinates. The number of cyclic coordinates depends the
choice of generalized coordinates. In central force problems, 𝑥 and 𝑦 are not cyclic, but 𝜃 is cyclic
(angular momentum being conserved), leaving 𝑟. Four “half” math examples will be shown before we
see why canonical transformations are important in the fifth example, and in Hamilton-Jacobi theory in
the next section. (Hamilton-Jacobi theory will show us how classical mechanics may be seen as quantum
mechanics in the geometric optics limit.) The utility of coordinate inversion is shown in example 5.
Example 1. Let 𝐹 = 𝐹1 (𝑞, 𝑄, 𝑡), 𝑄 = 𝑄(𝑞, 𝑝, 𝑡), 𝑃 = 𝑃(𝑞, 𝑝, 𝑡), and 𝐾 = 𝐻 + 𝜕𝐹/𝜕𝑡. Now,
𝑑𝐹1
𝑑𝑡
𝜕𝐹1 𝜕𝐹1
𝜕𝐹1
= 𝑃𝑄̇ − 𝐾 +
+
𝑞̇ +
𝑑𝑄̇ .
𝜕𝑡
𝜕𝑞
𝜕𝑄
𝑝𝑞̇ − 𝐻 = 𝑃𝑄̇ − 𝐾 +
Since the old and new coordinates 𝑞 and 𝑄 are separately independent, the above result can only hold
identically only If the coefficients of 𝑞̇ and 𝑄̇ each vanish: that is:
𝑝=
𝜕𝐹1
,
𝜕𝑞
𝑃=−
𝜕𝐹1
,
𝜕𝑄
𝐾=𝐻+
𝜕𝐹1
.
𝜕𝑡
𝜕𝐻
Notice that we began with a Hamiltonian 𝐻 = 𝐻(𝑞, 𝑝, 𝑡) with 𝜕𝐻/𝜕𝑝 = 𝑞̇ and 𝜕𝑞 = −𝑝̇ and now we
have 𝑝 = 𝜕𝐹1 /𝜕𝑞 and 𝑃 = 𝜕𝐹1 /𝜕𝑄.
Example 2. This is example is the key example to Hamilton-Jacobi theory. Let 𝐹2 = 𝐹(𝑞, 𝑃, 𝑡) − 𝑄𝑃.
Then
𝑑𝐹2
𝑑𝑡
𝜕𝐹2
𝜕𝐹2
𝜕𝐹2
= 𝑃𝑄̇ − 𝐾 +
𝑞̇ +
𝑃̇ +
− 𝑄̇ 𝑃 − 𝑄𝑃̇
𝜕𝑞
𝜕𝑃
𝜕𝑡
𝜕𝐹2
𝜕𝐹2
𝜕𝐹2
= −𝐾 +
𝑞̇ +
𝑃̇ +
− 𝑄𝑃̇.
𝜕𝑞
𝜕𝑃
𝜕𝑡
𝑝𝑞̇ − 𝐻 = 𝑃𝑄̇ − 𝐾 +
By the same independence argument of example 1, it must be that
𝑝=
𝜕𝐹2
,
𝜕𝑞
𝑄=−
𝜕𝐹2
,
𝜕𝑃
𝐾=𝐻+
𝜕𝐹2
.
𝜕𝑡
Example 3. 𝐹 = 𝐹3 (𝑝, 𝑄, 𝑡) + 𝑞𝑝.
Example 4. 𝐹 = 𝑞𝑝 − 𝑄𝑃 + 𝐹4 (𝑝, 𝑃, 𝑡).
So far the four types of generating functions appear to be related by Legendre transformations, but the
generating function doesn’t have to conform to one of the four general types for all degrees of freedom
(See Goldstein p. 385).
Example 5. Consider an ideal mass-spring system with Hamiltonian
𝐻=
𝑝2 𝑘𝑞 2
+
.
2𝑚
2
1
Let 𝜔2 = 𝑘/𝑚. Then 𝐻 = 2𝑚 (𝑝2 + 𝑚2 𝜔2 𝑞2 ). That 𝐻 is written as the sum to two squares suggests a
transformation in 𝐻 in which 𝐻 itself is cyclic. If we could find a canonical transformation of the form:
𝑝 = 𝑓(𝑃)𝑐𝑜𝑠𝑄,
𝑞=
𝑓(𝑃)
𝑠𝑖𝑛𝑄,
𝑚𝜔
then the Hamiltonian as a function of Q and P would be
𝐾=𝐻=
𝑓 2 (𝑃)
𝑓 2 (𝑃)
(cos 2 𝑄 + sin2 𝑄) =
,
2𝑚
2𝑚
So that 𝑄 is cyclic. We need to find 𝑓(𝑃) such that the transformation Is canonical. From the equations
for 𝑝 and 𝑞, we have
𝑝 = 𝑚𝜔𝑞 cot 𝑄,
which is independent of 𝑓(𝑃). Note that 𝑝 is of the form 𝐹 = 𝐹1 (𝑞, 𝑄, 𝑡) generating function from
example 1, namely 𝑝 = 𝜕𝐹1 (𝑞, 𝑄)/(𝜕𝑞). The simplest form of 𝐹1 corresponding to = 𝑚𝜔𝑞 cot 𝑄 is
𝐹1 =
𝑚𝜔𝑞 2
cot 𝑄.
2
Then it follows that
𝑃=−
𝜕𝐹1
𝑚𝜔𝑞 2
=
.
𝜕𝑄 2 sin2 𝑄
Solving for 𝑞 (by inversion) results in
2𝑃
𝑓(𝑃)
𝑞=√
sin 𝑄 =
sin 𝑄 ,
𝑚𝜔
𝑚𝜔
Thus the only form for 𝑓(𝑃) leading to a canonical transformation is 𝑓(𝑃) = √2𝑚𝜔𝑃. Thus the
Hamiltonian (Kamiltonian) in the transformed equations is 𝐻 = 𝜔𝑃.
In the new coordinates, 𝐻 is cyclic in 𝑄. Thus the conjugate momentum 𝑃 is a constant, and 𝐻 = 𝐸, the
total energy. Thus 𝑃 = 𝐸/𝜔, and
𝑄̇ =
𝜕𝐻
= 𝜔.
𝜕𝑃
This differential equation has solution 𝑄 = 𝜔𝑡 + 𝛼, where 𝛼 is a constant of integration fixed by the
initial conditions. Finally,
2𝐸
𝑞=√
sin(𝜔𝑡 + 𝛼),
𝑚𝜔 2
the customary solution for a simple harmonic oscillator. This was overkill for the simple harmonic
oscillator, but it demonstrated finding new, canonical coordinates in which one of the canonical
variables is cyclic.
Section 9-3 The Symplectic Approach To Canonical Transformations is skipped. It should be covered by
the student because this approach comes back in (Lie) group theory and is useful.
Section 9-4 Poisson Brackets And Other Canonical Invariants will be treated after we derive the main
result of the Goldstein notes showing the classical mechanics may be viewed as the geometric optics
limit of quantum physics. Poisson brackets, of course, are closely related to one of the original
quantization schemes in quantum physics as we will see in the Sakurai notes.
Hamilton-Jacobi theory (chapter 10). The theory will be clarified by overkill to the simple harmonic
oscillator. If a Hamiltonian is conserved, a canonical transformation may be sought to cyclic coordinates
such as we’ve done above. We may also seek out a canonical transformation to constant quantities such
as initial conditions 𝑞 = 𝑞(𝑞0 , 𝑝0 , 𝑡0 ), 𝑝 = 𝑝(𝑞0 , 𝑝0 , 𝑡0 ), even if 𝐻 involves time. Certainly 𝐾 = 0 if 𝐻 +
𝜕𝐹/𝜕𝑡 = 0. Then it would follow that
𝑄̇𝑖 =
𝜕𝐾
= 0,
𝜕𝑃𝑖
𝑃𝑖 = −
𝜕𝐾
= 0.
𝜕𝑄𝑖
We choose the form 𝐹 = 𝐹2 (𝑞, 𝑃, 𝑡) omitting the −𝑄𝑃 term. 𝐻(𝑞, 𝑃, 𝑡) + 𝜕𝐹/𝜕𝑡 = 0 becomes the
Hamilton-Jacobi equation
𝐻 (𝑞,
𝜕𝐹2
𝜕𝐹2
, 𝑡) +
= 0,
𝜕𝑞
𝜕𝑡
⃗ = (𝑞1 , 𝑞2 , … , 𝑞𝑛 , 𝑡).
a partial differential equation (PDE). Typically it is a PDE in 𝑛 + 1 variables 𝑞 = 𝐪
That is,
𝜕𝐹2
𝜕𝐹2
𝐻 (𝑞𝑖 ,
, 𝑡) +
= 0.
𝜕𝑞𝑖
𝜕𝑡
The Hamilton-Jacobi equation has the form of a first-order in 𝑛 + 1 variables. Whatever the new
momenta are (in the transformed coordinates) we know that they must be constant since 𝐾 = 0. Let us
suppose that a solution exists
𝐹2 = 𝑆 = 𝑆(𝑞1 , 𝑞2 , … , 𝑞𝑛 ; 𝛼1 , 𝛼2 , … , 𝛼𝑛+1 , 𝑡),
where 𝑆 is Hamilton’s principle function. The quantities (𝛼1 , 𝛼2 , … , 𝛼𝑛+1 ) are 𝑛 + 1 independent
constants of integration. One of the constants of integration is in fact irrelevant to the solution, for 𝑆
itself does not appear in the Hamilton-Jacobi equation. Hence if 𝑆 is a solution, so too is 𝑆 + 𝛼, where 𝛼
is any constant. Thus one of the 𝑛 + 1 constants must be an additive constant tacked on to 𝑆. An
additive constant has no importance in a generating function, since only partial derivatives of the
generating function occur in the transformation equations. Hence, really,
𝑆 = 𝑆(𝑞1 , 𝑞2 , … , 𝑞𝑛 ; 𝛼1 , 𝛼2 , … , 𝛼𝑛 ; 𝑡),
where none of the 𝑛 independent constants is solely additive. Then 𝑆 is of the form 𝐹2 (𝑞, 𝑃, 𝑡), for 𝑆 is a
function of 𝑛 coordinates, time, and 𝑛 independent quantities 𝛼𝑖 . We are therefore at liberty
(mathematically) to take the 𝑛 constants of integration to be the new (constant) momenta: 𝑃𝑖 = 𝛼𝑖 .
Such a choice doesn’t contradict the original assertion that the new momenta are connected with the
initial values of 𝑞 and 𝑝 at time 𝑡0 . Then the 𝑛 transformation equations 𝑝𝑖 = 𝜕𝐹2 /𝜕𝑞𝑖 can now be
written as
𝑝𝑖 =
𝜕𝑆(𝑞, 𝛼, 𝑡)
,
𝜕𝑞𝑖
where the 𝑞𝑖 and 𝛼 stand for the complete set of quantities. At time 𝑡0 these constitute 𝑛 equations
relating the 𝑛 𝛼′s with the initial values of 𝑞 and 𝑝, thus enabling one to evaluate the constants of
integration in terms of the specific initial conditions. Then the other half of the equations of
transformation, which provide the new constant coordinates (review example 2), appear as
𝑄𝑖 = 𝛽𝑖 =
𝜕𝑆(𝑞, 𝛼, 𝑡)
.
𝜕𝑞𝑖
The constant 𝛽′s can be similarly obtained from the initial conditions, simply by calculating the value of
the right side of the above equation at time 𝑡 = 𝑡0 with the known initial values of 𝑞𝑖 . That is, the
equation above can be “turned inside out” to furnish 𝑞𝑗 in terms of 𝛼, 𝛽, and 𝑡:
𝑞𝑗 = 𝑞𝑗 (𝛼, 𝛽, 𝑡),
which solves the problem of giving the coordinates as functions of the time and the initial conditions.
After 𝑝𝑖 = 𝜕𝑆(𝑞, 𝛼, 𝑡)/𝜕𝑞, has been performed, 𝑞𝑗 = 𝑞𝑗 (𝛼, 𝛽, 𝑡) may be substituted for the 𝑞′s, thus
giving the momenta 𝑝𝑖 as functions of 𝛼, 𝛽, and 𝑡: 𝑝𝑖 = 𝑝𝑖 (𝛼, 𝛽, 𝑡). With the 𝑞𝑗 ′s and the 𝑝𝑖 ′s we have
the complete solution of Hamilton’s equation of motion.
Hamilton’s principle function 𝑆 is thus the generator of a canonical transformation to constant
coordinates and momenta, that solves the mechanical problem. Mathematically, we could just as well
have chosen 𝑛 quantities 𝛾𝑖 which are independent functions of the 𝛼𝑖 constants of integration and then
proceeded pretty much as before (see Goldstein p. 441).
Let us consider the physical meaning of the total time derivative of 𝑆.
𝑑𝑆 𝜕𝑆
𝜕𝑆
=
𝑞̇ 𝑖 + ,
𝑑𝑡 𝜕𝑞𝑖
𝜕𝑡
since the 𝑃𝑖 ′s are constants in time. From 𝑝𝑖 = 𝜕𝑆(𝑞, 𝛼, 𝑡)/𝜕𝑞𝑖 and the Hamilton-Jacobi equation, we
get
𝑑𝑆
= 𝑝𝑖 𝑞̇ 𝑖 − 𝐻 = 𝐿,
𝑑𝑡
so that Hamilton’s principle function differs at most from the indefinite time integral of 𝐿 only by a
constant:
𝑆 = ∫ 𝐿𝑑𝑡 + constant.
Now, Hamilton’s principle is a statement about the definite integral of 𝐿 and from it we obtained the
solution of the problem via the Lagrange equations. Here the same action integral in an indefinite form,
furnishes another way of solving the problem.
Example. The Harmonic Oscillator Problem As An Example Of The Hamilton-Jacobi Method. Recall
𝐻=
1
(𝑝2 + 𝑚2 𝜔2 𝑞2 ) ≡ 𝐸,
2𝑚
where
𝑘
𝜔=√ .
𝑚
The Hamilton-Jacobi equation for 𝑆 is obtained by setting 𝑝 to 𝜕𝑆/𝜕𝑞 and substituting in the
Hamiltonian:
1 𝜕𝑆 2
𝜕𝑆
[( ) + 𝑚2 𝜔2 𝑞2 ] +
= 0.
2𝑚 𝜕𝑞
𝜕𝑡
Since the explicit dependence of 𝑆 on 𝑡 is involved only in the last term for our example, a solution can
be found in the form
𝑆(𝑞, 𝛼, 𝑡) = 𝑊(𝑞, 𝛼) − 𝛼𝑡,
where 𝛼 is a constant of integration (to be designated later as the transformed momentum). With this
choice of solution the time can be eliminated from our Hamilton-Jacobi equation in 𝑆. It follows that
1 𝜕𝑊 2
[(
) + 𝑚2 𝜔2 𝑞2 ] = 𝛼.
2𝑚 𝜕𝑞
We could recognize that 𝛼 = 𝐸 from 𝑆(𝑞, 𝛼, 𝑡) = 𝑊(𝑞, 𝛼) − 𝛼𝑡 and the Hamilton-Jacobi relation
𝜕𝑆
+ 𝐻 = 0,
𝜕𝑡
which reduces to 𝐻 = 𝛼 and therefore 𝐸 = 𝛼. Now
𝑊 = √2𝑚𝛼 ∫ 𝑑𝑞√1 −
𝑚𝜔 2 𝑞2
,
2𝛼
so that
𝑆 = √2𝑚𝛼 ∫ 𝑑𝑞√1 −
𝑚𝜔 2 𝑞2
− 𝛼𝑡.
2𝛼
We are interested in the partial derivatives of 𝑆.
𝛽=
𝜕𝑆
2𝑚
=√
∫
𝜕𝛼
𝛼
𝑑𝑞
2 2
√1 − 𝑚𝜔 𝑞
2𝛼
− 𝑡,
which integrates to
𝑡+𝛽 =
1
𝑚𝜔 2
arcsin 𝑞√
.
𝜔
2𝛼
We invert this result to obtain 𝑞 as a function of 𝑡 and the two constants of integration 𝛼 and 𝛽:
2𝛼
𝑞=√
sin 𝜔(𝑡 + 𝛽),
𝑚𝜔 2
the recognized simple harmonics oscillator solution. Now
𝑝=
𝜕𝑆 𝜕𝑊
=
= √2𝑚𝛼 − 𝑚𝜔 2 𝑞2 = √2𝑚𝛼(1 − sin2 𝜔(𝑡 + 𝛽)) = √2𝑚𝛼 cos 𝜔(𝑡 + 𝛽),
𝜕𝑞
𝜕𝑞
which jives with 𝑝 = 𝑚𝑞̇ . Now to determining our constants 𝛼 and 𝛽 from the initial conditions. Take
the sum 𝑞 2 + 𝑝2 we get
2𝑚𝛼 = 𝑝02 + 𝑚2 𝜔2 𝑞02 .
The same result holds from connecting 𝛼 with𝐸. Finally, the phase constant 𝛽 is related to 𝑞0 and 𝑝0 by
tan 𝜔𝛽 = 𝑚𝜔
𝑞0
.
𝑝0
Thus the Hamilton’s principle function is the generator of a canonical transformation to a new
coordinate that measures the phase angle of the oscillation and to a new canonical momentum
identified as the total energy.
If the solution for 𝑞 is substituted into the integral equation for 𝑆, we get
1
𝑆 = 2𝛼 ∫ cos 2 𝜔(𝑡 + 𝛽)𝑑𝑡 − 𝛼𝑡 = 2𝛼 ∫ (cos2 𝜔(𝑡 + 𝛽) − ) 𝑑𝑡.
2
Now, the Lagrangian is
1
(𝑝2 − 𝑚2 𝜔2 𝑞2 )
2𝑚
= 𝛼(cos 2 𝜔(𝑡 + 𝛽) − sin2 𝜔(𝑡 + 𝛽))
1
= 2𝛼 (cos2 𝜔(𝑡 + 𝛽) − ),
2
𝐿=
so that 𝑆 is the time integral of the Lagrangian in agreement with the general relation 𝑆 = ∫ 𝐿𝑑𝑡 +
constant. Note that the identity could not be proved until after the solution to the problem had been
obtained.
10-3 The Hamilton-Jacobi Equation For Hamilton’s Characteristic Function. Note that 𝐻 is not an
explicit function of 𝑡. The Hamilton-Jacobi equation is therefore a separable PDE
𝜕𝑆
𝜕𝑆
+ 𝐻 (𝑞𝑖 ,
) = 0.
𝜕𝑡
𝜕𝑞𝑖
This allows us to assume a solution for 𝑆 of the form 𝑆(𝑞𝑖 , 𝛼𝑖 , 𝑡) = 𝑊(𝑞𝑖 , 𝛼𝑖 ) − 𝛼1 𝑡, reducing our
differential equation to
𝐻 (𝑞𝑖 ,
𝜕𝑊
) = 𝛼1 ,
𝜕𝑞𝑖
which no longer involves time. We just saw above that −𝐻 = 𝜕𝑆/𝜕𝑡. One of the constants of integration
appearing in 𝑆, namely 𝛼1 , is thus equal to the constant value of 𝐻, which is normally the energy. The
time-independent function 𝑊 appears here merely as a part of the generating function 𝑆 when 𝐻 is
constant. It can also be shown that 𝑊 separately generates its own contact transformation with
properties quite different from that generated by 𝑆. 𝑊 is known as Hamilton’s characteristic function
that generates a canonical transformation in which all of the new coordinates are cyclic.
10-4 Separation Of Variables In The Hamilton-Jacobi Equation. This discusses that Hamilton-Jacobi
techniques become useful when separation of variables can be effected. The central force problem is
treated as an example. It would be cool to revisit, if only lightly, this material after section 10-8 in terms
of the modeling the hydrogen atom with Schrödinger’s equation. For the theoretician in training, this
section develops math tools to determine the most general form of a scalar potential for a particle in
spherical polar coordinates that still allows for separation of variables of the Hamilton-Jacobi equation.
Sections 10-5 Action Angle Variables in Systems Of One Degree Of Freedom. This section can be
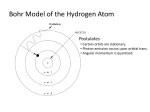
skipped as it relates only to the old Bohr quantum theory of atomic spectra (and to some modern
applications in accelerator design). Action-angle variables are a variation of the Hamilton-Jacobi
procedure in which the integration constants 𝛼𝑖 appearing directly in the solution of the Hamilton-Jacobi
equation are not themselves chosen to be new momenta. Instead we use suitably defined constants 𝐽𝑖
which form a set of 𝑛 independent functions of the 𝛼 ′ 𝑠, which are known as action-angle variables. A
toy example is given. It is assumed that we have a conservative system so that 𝐻(𝑞, 𝑝) = 𝛼1 . Solving for
the momentum we have 𝑝 = 𝑝(𝑞, 𝛼1 ). We define a so-called action variable 𝐽 defined as
𝐽 = ∫ 𝑝𝑑𝑞,
where the integral is conducted over a complete period of libration or of rotation; the name results from
the similarity to the abbreviated action in section 8-6. It follows that 𝐽 is always some function of 𝛼1
alone: 𝛼1 ≡ 𝐻 = 𝐻(𝐽). Hence Hamilton’s characteristic function can be written as 𝑊 = 𝑊(𝑞, 𝐽). The
generalized coordinate conjugate to 𝐽, known as the angle variable 𝑤 is defined by
𝑤=
𝜕𝑊
.
𝜕𝐽
Correspondingly, the equation of motion for 𝑤 is
𝑤̇ =
𝜕𝐻
= 𝜈(𝐽),
𝜕𝐽
where 𝜈 is a constant of 𝐽 only. Thus 𝑤 = 𝜈𝑡 + 𝛽. Now consider the change in 𝑤 as 𝑞 goes through a
cycle of libration or rotation:
∆𝑤 = ∮
𝜕𝑤
𝜕2𝑊
𝑑𝑞 = ∮
𝑑𝑞 .
𝜕𝑞
𝜕𝑞𝜕𝐽
Since 𝐽 is a constant,
∆𝑤 =
𝑑 𝜕𝑊
𝑑
∮
𝑑𝑞 = ∮ 𝑝𝑑𝑞 = 1.
𝑑𝐽 𝜕𝑞
𝑑𝐽
So 𝑤 changes only by unity through a period of 𝑞. So
𝑤(𝑡 = 0) − 𝑤(𝑡 = 𝜏) = 𝜈𝜏 + 𝛽 − 𝜈 ∙ 0 − 𝛽 = 𝜈𝜏 = 1.
Thus
1
𝜈= .
𝜏
We have found the frequency without finding a complete solution to the problem.
1
Example. Consider the simple harmonic oscillator. Recall that 𝐻(𝑝, 𝑞) = 2𝑚 (𝑝2 + 𝑚2 𝜔2 𝑞2 ) = 𝐸, where
𝜔 = √(𝑘/𝑚). Then
𝐽 = ∮ 𝑝𝑑𝑞 = ∮ √2𝑚𝛼 − 𝑚2 𝜔 2 𝑞2 𝑑𝑞.
The substitution
2𝛼
𝑞=√
sin 𝜃,
𝑚𝜔 2
reduces the integral to
2𝛼 2𝜋 2
2𝜋𝛼
𝐽=
∫ cos 𝜃 𝑑𝜃 =
.
𝜔 0
𝜔
Thus 𝛼 ≡ 𝐻 = 𝐽𝜔/2𝜋. The frequency of oscillation is therefore
𝜕𝐻
𝜔
1 𝑘
√ .
=𝜈=
=
𝜕𝐽
2𝜋 2𝜋 𝑚
Section 10-6 Action-Angle Variables For Completely Separable Systems. (Skip this if you’re skipping 105) This is a generalization of section 10-5 to, say, harmonic oscillators in two or three dimensions, or two
an old, Bohr quantum mechanical understanding of atomic spectra. The big idea is that a multi-periodic
function for the 𝑞𝑘 may be written as a multiple Fourier expansion
∞
𝑞𝑘 = ∑
∞
∞
(𝑘)
∑ , … , ∑ 𝑎𝑗1 ,…,𝑗𝑛 𝑒 2𝜋(𝑗1 𝑤1 +⋯+𝑗𝑛 𝑤𝑛 ) .
𝑗1 =−∞ 𝑗2 =−∞
𝑗𝑛 =−∞
10-7 The Kepler Problem In Action-Angle Variables. (Skip if you’re skipping 10-5 and 10-6.) The method
of action-angle variables gave the royal road to (old) quantization. After the Kepler problem is treated,
the quantization by fiat scheme of old quantum mechanics is discussed (𝐽 = ∫ 𝑝𝑑𝑞 = 𝑛ℏ). Sommerfeld
stated that the method of action-angle variables provided “a royal road to quantization.”
Section 10-8, Hamilton-Jacobi Theory, Geometrical Optics, And Wave Mechanics. We have just seen
how Hamilton’s principle and characteristic functions are related according to
𝑆(𝑞, 𝑃, 𝑡) = 𝑊(𝑞, 𝑃) − 𝐸𝑡.
Since the characteristic function is independent of time, the surfaces of constant 𝑊 in configuration
space have fixed locations. A surface characterized by a constant value of 𝑆 must coincide at a given
time with some particular surface of constant 𝑊. However, the value of 𝑊 corresponding to a definite
value of 𝑆 changes with time in accordance with 𝑑𝑆/𝑑𝑡 = 𝑝𝑖 𝑞̇ 𝑖 − 𝐻 = 𝐿. Thus at 𝑡 = 0 the surfaces 𝑆 =
𝑎 and 𝑆 = 𝑏 coincide with the surfaces for which 𝑊 = 𝑎 and 𝑊 = 𝑏, see figure below.
Surfaces of constant 𝑆 are dragged along by surface of constant 𝑊. The motion of a given surface of
fixed 𝑆 is similar to the propagation of a wave front, such as a shock wave across space, propagating in
configuration space. In case you haven’t noticed it, we are now talking about “wave” mechanics.
Since the constant 𝑆 surfaces in general change their shape in the course of time, the wave velocity, i.e.,
the velocity with which the surfaces move, will not be uniform for all points of the surfaces. However, it
is possible to calculate the value of the wave velocity at any given point. We consider only one particle in
Cartesian coordinates to make things easy. Configuration space is thus ordinary three-dimensional
space.
The change 𝑑𝑊 is related to the normal distance 𝑑𝑠 according to
|∇𝑊| =
𝑑𝑊
,
𝑑𝑠
where 𝑑𝑠 is the perpendicular change. In 𝑑𝑡 a constant surface 𝑆 slides to 𝑊 + 𝑑𝑊 with 𝑑𝑊 = 𝐸𝑑𝑡 so
that the wave velocity 𝑢 is as follows
𝑑𝑊
𝑑𝑠 |∇𝑊|
𝐸
𝑢=
=
=
.
𝑑𝑊
|∇𝑊|
𝑑𝑡
𝐸
The Hamilton-Jacobi equation 𝐻(𝑞𝑖 , 𝜕𝑊/(𝜕𝑞𝑖 )) = 𝛼𝑖 becomes
𝐻(𝑞, 𝑃) =
𝑃2
+ 𝑉 = 𝐸.
2𝑚
Thus
𝑃2 = 2𝑚(𝐸 − 𝑉) = 2𝑚𝑇.
But 𝑝 = 𝐸/𝑢 = |∇𝑊|. In three dimensional space p
⃗ = ∇𝑊, normal to surfaces of constant 𝑆 𝑜𝑟 W. Thus
2
|∇𝑊| = 2𝑚𝑇 and
𝑢=
𝐸
𝐸
= .
√2𝑚𝑇 𝑝
The surfaces of constant 𝑆 have been characterized as wave fronts because they propagate in space in
the same manner as wave surfaces of constant phase. We have computed wave velocity, but nothing
has been said as to the origins of these waves. The most striking features of all wave motion result from
their periodicity, and there has been no indication so far of the frequency and wavelength spectra of the
waves associated with 𝑆. Let’s review some properties of light. The scalar wave equation of optics is
𝑛2 𝑑2 𝜙
∇ 𝜙 − 2 2 = 0,
𝑐 𝑑𝑡
2
where 𝜙 is a scalar quantity such as the scalar electromagnetic potential, 𝑐 is the velocity of light, and 𝑛
is the index of refraction. In general 𝑛 depends upon the medium and will be a function position in
space. If 𝑛 is constant the wave equation has solution of the form
𝜙 = 𝜙0 𝑒 𝑖(𝐤∙𝐫−𝜔𝑡) ,
where the wavenumber 𝑘 and the frequency 𝜔 are connected by the relation 𝑘 =
2𝜋
𝜆
=
𝑛𝜔
.
𝑐
Le the
direction of 𝐤 be the z axis. Then
𝜙 = 𝜙0 𝑒 𝑖𝑘0 (knz−𝑐𝑡) ,
where 𝑘0 is the wave number in the vacuum. We shall be interested, however, in the case of
geometrical optics, where 𝑛 varies slowly (linearly) in space. Since 𝑛 is assumed to change only gradually
in space, we seek solutions resembling the plane wave solution:
𝜙 = 𝑒 𝐴(𝐫)+𝑖𝑘0 (𝐿(𝐫)−𝑐𝑡) .
The quantities 𝐴 and 𝐿 are taken as functions of position to be determined and are both considered real.
Therefore 𝐴 is a measure of the amplitude of the wave. If 𝑛 were constant, 𝐿 would reduce to 𝑛𝑧 and in
consequence is called the optical path length of phase of the wave. It is also referred to as the eikonal.
Successive applications of the gradient operator to the solution of 𝜙 result in the relations
∇𝜙 = 𝜙∇(𝐴 + 𝑖𝑘0 𝐿),
∇2 𝜙 = 𝜙[∇2 (𝐴 + 𝑖𝑘0 𝐿) + (∇𝜙)∇(𝐴 + 𝑖𝑘0 𝐿)]
= 𝜙[∇2 (𝐴 + 𝑖𝑘0 𝐿) + ∇(𝐴 + 𝑖𝑘0 𝐿)∇(𝐴 + 𝑖𝑘0 𝐿)]
2
= 𝜙 [∇2 (𝐴 + 𝑖𝑘0 𝐿) + (∇(𝐴 + 𝑖𝑘0 𝐿)) , ]
or
∇2 𝜙 = 𝜙[∇2 𝐴 + 𝑖𝑘0 ∇2 𝐿 + (∇𝐴)2 − 𝑘02 (∇𝐿)2 + 2𝑖𝑘0 ∇𝐴 ∙ ∇𝐿].
𝑑2 𝜙 𝑛2
= 2 (𝑖𝑘0 )2 (−𝑐)2 = 𝑛2 𝑘02 .
𝑑𝑡 2
𝑐
The wave equation then becomes
𝑖𝑘0 [2∇𝐴 ∙ ∇𝐿 + ∇2 𝐿]𝜙 + [∇2 𝐴 + (∇𝐴)2 − 𝑘02 (∇𝐿)2 + 𝑛2 𝑘02 ]𝜙 = 0.
Since 𝐴 and 𝐿 are real, the equation hold only if the two expressions in the square brackets vanish
separately:
∇2 𝐴 + (∇𝐴)2 − 𝑘02 (∇𝐿)2 + 𝑛2 𝑘02 = 0,
2∇𝐴 ∙ ∇𝐿 + ∇2 𝐿 = 0.
Results to this point are exact. We can now introduce the assumption that 𝑛 varies only slowly with
distance; in particular, that 𝑛 does not change greatly over distances of the order of the wavelength.
Effectively, this means that the wavelength is small compared to the dimension of any change in the
medium. This is the assumption of geometrical optic. The term 𝑘02 = 4𝜋 2 /𝜆20 is therefore the prominent
term in ∇2 𝐴 + (∇𝐴)2 − 𝑘02 (∇𝐿)2 + 𝑛2 𝑘02 = 0. (That is ∇2 𝐴 + (∇𝐴)2 are negligible.) Thus we get
(∇𝐿)2 = 𝑛2 ,
which is the eikonal equation of geometrical optics. The surfaces of constant 𝐿 determined by this
equation are the surfaces of constant optical phase and thus define the wave fronts. The ray trajectories
are everywhere perpendicular to the wave fronts.
The eikonal equation (∇𝐿)2 = 𝑛2 is identical in form to the Hamilton-Jacobi equation|∇𝑊| = √2𝑚𝑇.
The characteristic 𝑊 plays the same role as the eikonal 𝐿, and √2𝑚(𝐸 − 𝑉) serves the same role as the
index of refraction 𝑛. The Hamilton-Jacobi equation thus tells us that classical mechanics corresponds to
the geometrical optics limit of a wave motion in which the rays are orthogonal to the surfaces of
constant 𝑆. It is now clear why Newton’s corpuscular theory and Huygens’ wave theory produce
identical results regarding reflection and refraction. See Goldstein p. 489 on how the principle of least
action is identical to Fermat’s principle of least time.
As a species of geometrical optics, classical mechanics is precisely the field in which the phenomena
depending on the wavelength (interference, diffraction, etc.) cannot occur. There is a duality of particle
and wave even in classical mechanics, but the particle plays the role of the senior partner. (Wave physics
occurs in continuum mechanics; not in the classical mechanics of point particles and rigid bodies.) Pre
quantum physics physicists could have speculated, nonetheless, on a generalization of classical
mechanics to a wave mechanics. The similarity of the short wavelength Hamilton-Jacobi equation and
the eikonal equation implies proportionality. If 𝑊 corresponds to 𝐿, then 𝑆 = 𝑊 − 𝐸𝑡 must correspond
to the total phase of the wave described by 𝜙 = 𝑒 𝐴(𝐫)+𝑖𝑘0 (𝐿(𝐫)−𝑐𝑡) . The total phase is
𝐿
𝑘0 (𝐿 − 𝑐𝑡) = 2𝜋 ( − 𝜈𝑡).
𝜆0
An optical theory is being linked to a mechanical theory via 𝐸𝑡 term in mechanics and the 𝜈𝑡 term in
optics. Hence the total energy 𝐸 and the wave frequency 𝜈 must be proportional, and we shall call the
constant of proportionality ℎ. Wow!
𝐸 = ℎ𝜈.
The wavelength and the frequency are connected by 𝜆𝜈 = 𝑢, and so that from the Hamilton-Jacobi
result that 𝑢 = 𝐸/𝑝, we get
𝐸
𝑢 𝑝 ℎ
𝜆= = = .
𝜈 𝐸 𝑝
ℎ
Can one see a path of inspiration to the de Broglie wavelength of 1924? The expression for the phase in
the term 2𝜋(𝐿/𝜆0 − 𝜈𝑡) may be rewritten as
2𝜋 𝐿ℎ
( − ℎ𝜈𝑡).
ℎ 𝜆0
The quantity in the parenthesis is of the form 𝑊 − 𝐸𝑡 = 𝑆. This suggests that the wave amplitude to be
associated with the mechanical particle motion should have the form
𝜓 = 𝜓0 𝑒
𝑖𝑆⁄
ℏ,
where ℏ ≡ ℎ/2𝜋. If this speculation is right, then the equation governing this wave amplitude should
reduce to the Hamilton-Jacobi equation in the limit of small ℎ or, equivalently, in the limit of short 𝜆. By
hindsight we know that the equation satisfied by 𝜓 is the Schrödinger (time-dependent) wave equation
ℏ2 2
ℏ 𝜕𝜓
∇ 𝜓 − 𝑉𝜓 =
.
2𝑚
𝑖 𝜕𝑡
Well, is the Hamilton-Jacobi equation the shortwave length limit of the Schrödinger wave equation? Let
us substitute 𝜓 = 𝜓0 𝑒
𝑖𝑆⁄
ℏ
into the Schrödinger equation. We have
𝜕𝜓 𝑖 𝜕𝑆
=
,
𝜕𝑡 ℏ 𝜕𝑡
𝜕𝜓 𝑖 𝜕𝑆
=
.
𝜕𝑥 ℏ 𝜕𝑥
The equivalent Laplacian in Cartesian coordinates is equivalent to
∇2 𝜓 =
𝑖
𝜓
𝜓∇2 𝑆 − 2 (∇𝑆)2 .
ℏ
ℏ
In terms of 𝑆 the Schrödinger equation can therefore be written as
[
1
𝜕𝑆
𝑖ℏ 2
(∇𝑆)2 + 𝑉] +
=
∇ 𝑆.
2𝑚
𝜕𝑡 2𝑚
The square bracket is the Hamiltonian in the Hamilton-Jacobi equation for a single particle described in
Cartesian coordinates under potential 𝑉, but the right hand side is not zero. Our result may be called the
quantum mechanical Hamilton-Jacobi equation. It reduces to the classical equation as ℏ → 0, or
equivalently as 𝜆 → 0. Note that ∇2 𝑆 arises in association with (∇𝑆)2 in the evaluation of ∇2 𝜙.
Therefore one can drop the term if ℏ∇2 𝑆 ≪ (∇𝑆)2 , or equivalently, if ℏ∇ ∙ 𝐩 ≪ 𝑝2 . In one dimension
𝜆 𝑑𝑝
≪ 1.
2𝜋𝑝 𝑑𝑥
Classical mechanics, as the geometrical optics limit, is valid when the wavelength is so short that the
momentum changes by a negligible fraction over a distance of 𝜆. In turn this implies that the potential
doesn’t vary appreciably over the wavelength.
Hamilton realized the equivalence of the Hamilton-Jacobi equation and the eikonal in 1834; the
corresponding wave equation was first derived by Schrödinger in 1926. There was no justification for a
generalization of classical mechanics to a purely speculative, more general wave theory in Hamilton’s
time. Lastly, if we expand
[
1
𝜕𝑆
𝑖ℏ 2
(∇𝑆)2 + 𝑉] +
=
∇ 𝑆.
2𝑚
𝜕𝑡 2𝑚
in a power series in ℏ, collect coefficients of the same power of ℏ, the lowest approximation is the
classical Hamilton-Jacobi equation. The next approximation, linear in ℏ is the WKB or semiclassical
approximation.
Poisson Brackets (chapter 9). The Poisson bracket of two functions 𝑢, 𝑣 with respect to the canonical
variables (𝑞, 𝑝) is defined as
[𝑢, 𝑣]𝑞,𝑝 =
𝜕𝑢 𝜕𝑣
𝜕𝑢 𝜕𝑢
−
.
𝜕𝑞𝑖 𝜕𝑝𝑖 𝜕𝑝𝑖 𝜕𝑞𝑖
This bilinear expression has a symplectic structure (section 9-3), as in Hamilton’s equations, where 𝑞 is
coupled to 𝑝 and 𝑝 with −𝑞. The Poisson bracket lends itself to be written in matrix form. It has (Lie)
algebraic properties
[𝑢, 𝑢] = 0
(antisymmetry):
[𝑢, 𝑣] = −[𝑣, 𝑢].
Also
[𝑎𝑢 + 𝑏𝑣, 𝑤] = 𝑎[𝑢, 𝑣] + 𝑏[𝑣, 𝑤],
[𝑢𝑣, 𝑤] = [𝑢, 𝑤]𝑣 + 𝑢[𝑣, 𝑤],
[𝑢, [𝑣, 𝑤]] + [𝑣, [𝑤, 𝑢]] + [𝑤, [𝑢, 𝑣]] = 0,
with this last result named Jacobi’s identity. Studying Bianchi’s identity and Ricci’s identity is good for
the future particle and field theorist. Ryder QFT 2nd ed. does a nice job of this.
Example. Let 𝐻 = 𝑝2 /2𝑚 − 𝑚𝑎𝑥, a particle in a constant gravity field causing motion (flat Earth
approximation). Consider
[𝑥, 𝐻] =
[[𝑥, 𝐻], 𝐻] = [
𝜕𝑥 𝜕𝐻 𝜕𝑥 𝜕𝐻 𝑝
−
= .
𝜕𝑥 𝜕𝑝 𝜕𝑝 𝜕𝑥 𝑚
𝑝
1 𝜕𝑝 𝜕𝐻 𝜕𝑝 𝜕𝐻
, 𝐻] = {
−
} = 𝑎.
𝑚
𝑚 𝜕𝑥 𝜕𝑝 𝜕𝑝 𝜕𝑥
No more recursive Poisson brackets are possible. But what we have arrived at is
𝑥 = 𝑥0 + [𝑥, 𝐻]𝑡=0 𝑡 +
1
= 𝑥0 + 𝑣𝑡 + 𝑎𝑡 2 .
2
1
[[𝑝, 𝐻], 𝐻]𝑡=0 𝑡 2
2!
Thus, 𝐻 in the Poisson bracket formulation of classical physics is the infinitesimal (Lie) generator of
motion just as it is in quantum mechanics. Notionally we could think that 𝑥 evolves as 𝑥0 𝑒 [𝑥,𝐻]𝑡 . The
Poisson bracket formulation is thus the analog of the Heisenberg picture of quantum mechanics, but
remember, Heisenberg developed matrix mechanics during the time of old quantum mechanics in its
action-angle Fourier expansion formulation.
∞
𝑋(𝑡) = ∑ 𝑒
2𝜋𝑖𝑛𝑡
𝑇 𝑋𝑛 ,
𝑛=−∞
∗
where the 𝑋𝑛 are real 𝑋𝑛 = 𝑋−𝑛
. It was known that for large 𝑛 and 𝑚, but with 𝑛 − 𝑚 is relatively small
and 𝐸𝑛 − 𝐸𝑚 ≈ ℎ(𝑛 − 𝑚)/𝑇, where 𝑇 is the classical period of either orbit 𝑛 or orbit 𝑚, since the
difference between them is higher order in ℎ. For 𝑛, 𝑚 small or 𝑛 − 𝑚 large, the frequencies are not
integer multiples of any single frequency. Since the frequencies which the particle emits are the same
as the frequencies in the Fourier description of its motion, this suggests that something in the timedependent description of the particle is oscillating with frequency (𝐸𝑛 − 𝐸𝑚 )/ℎ. Heisenberg called this
quantity 𝑋𝑛𝑚 and demanded that it should reduce to the classical Fourier coefficients in the classical
limit. For large values of 𝑛, 𝑚, with 𝑛 − 𝑚 relatively small, 𝑋𝑛𝑚 is the (𝑛 − 𝑚)th Fourier coefficient of
the classical motion at orbit𝑛. Since 𝑋𝑛𝑚 has opposite frequency to𝑋𝑛𝑚 , the condition that 𝑋 is real
∗
becomes 𝑋𝑛𝑚 = 𝑋𝑚𝑛
, anticommuting matrices. By definition, 𝑋𝑛𝑚 only has the frequency (𝐸𝑛 −
𝐸𝑚 )/ℎ so that its time evolution is
𝑋𝑛𝑚 (𝑡) = 𝑒
2𝜋𝑖(𝐸𝑛 −𝐸𝑚 )𝑡
ℎ
𝑋𝑛𝑚 (0).
This is the original form of Heisenberg’s equation of motion (Wikipedia). Today, one way we connect
classical mechanics to quantum physics is through so-called canonical quantization, e.g.,
[𝑥, 𝑝]𝑐𝑙𝑎𝑠𝑠𝑖𝑐𝑎𝑙 → [𝑥̂, 𝑝̂ ]𝑄𝑀 .
This is will be developed in the Sakurai notes.
Additional historical notes. We have seen that Hamilton-Jacobi mechanics “corresponds” to geometric
optics. The Schrödinger path started by an offhand comment by Debye on de Broglie. Schrödinger
started off with the relativistic Kline-Gordon equation, but the spectral hydrogen lines via the KlineGordon equation disagreed with the Sommerfeld relativistic corrected Bohr model, so he ended up
using the classical mechanics equation. He published in 1926. Max Born attended a lecture in the
summer of 1926 and learned of the accidental Davisson-Germer data. Wanting to clean their apparatus,
they heated it in the presence of nitrogen and created crystals of nitrogen oxide. These crystals
diffracted the electron beam showing that corpuscular matter had wave properties!
Author’s notes. I strongly recommend reading of Goldstein chapter 11, Canonical Perturbation Theory
for both time-dependent and time-independent cases. It is far more complex than in quantum
mechanics. Treatment of orbits around an oblate sphere relate to the orbital mechanics of satellites and
to the classical precession of the perihelion of Mercury. As we know, the classical value fell short.
Einstein’s theory of general relativity fixed this shortfall. The material on adiabatic invariants in terms of
action-angle variables treat practical problems. Chapter 12 is a must read for the future particle and
field theorist as it develops classical theory and Noether’s theorem.