Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Velocity-addition formula wikipedia , lookup
Jerk (physics) wikipedia , lookup
Equations of motion wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Coriolis force wikipedia , lookup
Frame of reference wikipedia , lookup
Classical mechanics wikipedia , lookup
Fundamental interaction wikipedia , lookup
Inertial frame of reference wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Mass versus weight wikipedia , lookup
Hooke's law wikipedia , lookup
Fictitious force wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Centrifugal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
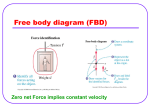
Concept of Force Force is a vector quantity Concept of Force and Newton’s Laws of Motion 8.01 W03D1 The magnitude of the total force is defined to be F = (mass) x (magnitude of the acceleration) The direction of the total force on a body is the same as the direction of the acceleration. The SI units for force are newtons (N): 1 N = 1kg . m/s2 Superposition Principle G Apply two forces F1 and Forces G F2 on a body, the total force is the vector sum of the two forces: G G G F total = F1 + F2 Notation: The force acting on body 1 due to the G interaction between body 1 and body 2 is denoted by F12 G G Ftotal ≡ ma Gravitation Electric and magnetic forces Elastic forces (Hooke’s Law) Frictional forces: static and kinetic friction, fluid resistance Example: The total force exerted on m3 by m1 and m2 is: G G G F3total = F31 + F32 Contact forces: normal forces and static friction Tension and compression 1 Free Body Diagram Newton’s First Law 1. Represent each force that is acting on the object by an arrow on a free body force diagram that indicates the direction of GT G G the force F = F1 + F2 + ⋅⋅⋅ 2. Choose set of independent unit vectors and draw them on free body diagram. 3. G Decompose each force Fi in terms of vector components. G Fi = Fi , x ˆi + Fi , y ˆj + Fi , z kˆ 4. Add vector components to find vector decomposition of the total force Every body continues in its state of rest, or of uniform motion in a right line, unless it is compelled to change that state by forces impressed upon it. G G ∑F = 0 i G ⇒ v = constant FxT = F1, xT + F2, xT + ⋅⋅⋅ Fy T = F1, yT + F2, yT + ⋅⋅⋅ Fz T = F1, z T + F2, z T + ⋅⋅⋅ Reference Systems Use coordinate system as a ‘reference frame’ to describe the position, velocity, and acceleration of objects. Relatively Inertial Reference Frames Two reference frames. Origins need not coincide. One moving object has different position vectors in different frames G G G r1 = R + r2 Relative velocity between the two reference frames G G V = dR dt is constant since the relative acceleration is zero G G G A = dV dt = 0 2 Law of Addition of Velocities Suppose the object is moving; then, observers in different reference frames will measure different velocities Velocity of the object in Frame 1: G G v1 = dr1 dt Velocity of the object in Frame 2: G G v 2 = dr2 dt Newton’s First Law Newton’s First Law in relatively inertial reference frames: If there is no net force impressed on an object at rest in Frame 2, then there is also no net force impressed on the object in Frame 1. An object that is at rest in Frame 2 is moving at a constant velocity in reference Frame 1. Velocity of an object in two different reference G G G frames dr1 R r2 = + dt dt dt G G G v1 = V + v 2 Table Problem Suppose two cars, Car A, and Car B, are traveling along roads that are perpendicular to each other. One observer is at rest with respect to the ground. A second observer is in Car A. According to the observer ground, Car A G on the ˆ is moving with velocity v A = vA j , and Car B is G ˆ moving with velocity v B = vB i . What is the velocity of Car B according to the observer in Car A? Express the velocity of Car B according to the observer in Car A as a vector (specify the components) and give the direction and magnitude. Newton’s Second Law The change of motion is proportional to the motive force impresses, and is made in the direction of the right line in which that force is impressed, G G F = m a. When multiple forces are acting, G N G ∑ F = m a. i i =1 In Cartesian coordinates: N ∑F i =1 x,i = m ax , N ∑F i =1 y,i = m ay , N ∑F i =1 z,i = m az . 3 Force Law: Newtonian Induction Newton’s Third Law To every action there is always opposed an equal reaction: or, the mutual action of two bodies upon each other are always equal, and directed to contrary G G parts. F1,2 = −F2,1 • Definition of force has no predictive content. • Need to measure the acceleration and the mass in order to define the force. • Force Law: Discover experimental relation between force exerted on object and change in properties of object. • Induction: Extend force law from finite measurements to all cases within some range creating a model. Action-reaction pair of forces cannot act on same body; they act on different bodies. Force Law: Gravitational Force near the Surface of the Earth Near the surface of the earth, the gravitational interaction between a body and the earth is mutually attractive and has a magnitude of G Fgrav = mgrav g where mgrav is the gravitational mass of the body and g is a positive constant. g = 9.80665 m ⋅ s −2 • Second Law can now be used to predict motion! • If prediction disagrees with measurement adjust model. Empirical Force Law: Hooke’s Law Consider a mass m attached to a spring Stretch or compress spring by different amounts produces different accelerations Hooke’s law: G | F | = k Δl Direction: restoring spring to equilibrium Hooke’s law holds within some reasonable range of extension or compression 4 Concept Question: Hooke’s Law Two identical springs with spring constant k are attached to each other. A block of mass m is suspended from the lower spring. What is the equivalent spring constant keq of the system of two springs? Note the block displaces the same amount in the two figures. Lecture Demo: Spring Constant Group Problem: Hooke’s Law and Free Body Diagram The spring in configuration (a) is stretched a distance Δx . The same spring in configuration (b) will stretch a distance 1) 2) 3) 4) 5) 2 Δx Δx Δx/2 0 Not sure 1) keq = k 2) keq = k/2 3) keq = 2k 4) an unknown relation; there is not enough information. Force Laws: Contact Forces Between Surfaces The contact force between two surfaces is denoted by the vector G G total Fsurface , hand ≡ C Normal Force: Component of the contact force perpendicular to surface and is denoted by G normal G Fsurface , hand ≡ N Friction Force: Component of the contact force tangent to the surface and is denoted by G G tangent Fsurface , hand ≡ f G G G C≡ N+f Therefore the contact force can be modeled as a vector sum 5 Concept Question: Normal Force Consider a person standing in an elevator that is accelerating upward. The upward normal force N exerted by the elevator floor on the person is Concept Question: Car-Earth Interaction Consider a car at rest. We can conclude that the downward gravitational pull of Earth on the car and the upward contact force of Earth on it are equal and opposite because 1) 2) 3) 4) 1) larger than 2) identical to 3) smaller than the two forces form an interaction pair. the net force on the car is zero. neither of the above. unsure the downward force of gravity on the person. Kinetic Friction The kinetic frictional force fk is proportional to the normal force, but independent of surface area of contact and the velocity. The magnitude of fk is fk = μk N Static Friction Varies in direction and magnitude depending on applied forces: 0 ≤ f s ≤ f s,max = μ s N Static friction is equal to it’s maximum value f s,max = μs N where µk is the coefficients of friction. Direction of fk: opposes motion 6 Friction on Motorcycle Wheel A motorcycle has mass m and is accelerating forwards with acceleration a. The coefficient of friction of the rear wheel with the road is μ. The weight W is equally divided between front and rear wheels. The force of friction on the rear wheel is: 1. 2. 3. 4. 5. 6. 7. 8. 9. W μ forwards Wμ/2 forwards Wμ backwards Wμ/2 backwards Ma forwards Ma backwards Ma/2 forwards Ma/2 backwards None of above Tension in a Rope The tension in a rope at a distance x from one end of the rope is the magnitude of the action-reaction pair of forces acting at that point , G G T ( x) = Fleft,right ( x) = Fright,left ( x) Concept Question: Tension in Rope You are trying to pull a rock resting on the ground with a heavy rope (the rope has non-zero mass). Just before the rock slips and starts to move, the magnitude of the tension in the rope is 1) greater than the magnitude of the pulling force? 2) equal to the magnitude of the pulling force? 3) less than the magnitude of the pulling force? 4) Not enough information is given to answer. 7