Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Relativistic quantum mechanics wikipedia , lookup
Hooke's law wikipedia , lookup
Internal energy wikipedia , lookup
Centripetal force wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Atomic theory wikipedia , lookup
Old quantum theory wikipedia , lookup
Quantum vacuum thruster wikipedia , lookup
Angular momentum wikipedia , lookup
Classical mechanics wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Angular momentum operator wikipedia , lookup
Mass in special relativity wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Center of mass wikipedia , lookup
Equations of motion wikipedia , lookup
Seismometer wikipedia , lookup
Hunting oscillation wikipedia , lookup
Electromagnetic mass wikipedia , lookup
Work (physics) wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Photon polarization wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Classical central-force problem wikipedia , lookup
Relativistic angular momentum wikipedia , lookup
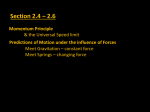
6/06 Linear Momentum Conservation Conservation of Linear Momentum About this lab: In certain circumstances (only third-law force pairs acting), Newton's laws predict a conserved (unchanged) quantity, total linear momentum, for a system of interacting parts. This is true independent of force type or details of internal interaction, offering great simplification if the assumptions are satisfied. Linear momentum is a vector quantity, so attention to direction and signs is important, even for one dimensional situations. The existence of the linear momentum conservation law is related to translational coordinate invariance, the independence of the laws of physics of position in space. (This does not mean that things are the same everywhere, only that physical laws are the same everywhere). If there are external forces (non-action reaction third law-pair forces), the net linear momentum of the system center of mass changes at a time rate proportional to the net external force. Apparatus: Pasco track, Pasco cart (two), Logger Pro, LabPro interface and cables, motion sensor (two), cart weights References: Cutnell & Johnson: Physics, 6th ed. Chapter 7, Examples 5 and 7 6/06 Linear Momentum Conservation Figure 1 An elastic collision conserving both organized mechanical energy and vector linear momentum for the system as a whole. The only horizontal forces are internal (action-reaction pair). There is exchange of momentum and energy. between system components. (Black vectors are total momentum vectors.) There are two equations in the two unknowns, v 1f and v 2f . These are the conservation of kinetic energy (a scaler equation, no direction) and the conservation of linear momentum (signs matter) For a tilted track there would be a non-zero gravitational component affecting the motion along the track. If the collision is fast enough, one may be able to make the approximation that the gravitational force is much smaller than the collision forces, and can be neglected during the collision. But some time after the collision is over the continuing effects of the gravitational force on momenta and kinetic energy would become apparent. 6/06 Linear Momentum Conservation Figure 2 The two carts approach each other for a maximally inelastic collision (final velocities will be the same ( v1f = v2f ). Organized mechanical energy will not be conserved, but vector linear momentum will be conserved for the system as a whole. Again, the only horizontal forces are internal (action-reaction pair), assuming no friction. There is exchange of momentum and energy between system components. “Lost” mechanical energy will be transformed into disorganized form (“heat”). Maximum loss of organized kinetic energy occurs for this case (same final velocities). There is a range of intermediate energy loss collisions where the final velocities are not the same. Introduction: 6/06 Linear Momentum Conservation Figure 3 Two low-friction carts and motion sensors, on a horizontal track The changes in motion of the constituents of the system shown above (two colliding carts) will arise from the internal forces between them. According to Newton's third law, these forces should be of equal (magnitude) and opposite (direction) at all times during collision, so the integrals of force times time are also so . Newton's second law (F = ma), integrated over time with a written instead as dv/dt, then gives equal and opposite linear momentum changes, or conservation of total linear momentum (no external forces). For a level track, the downward gravitational force on a cart is exactly counteracted by the upward track force, so there should be no change in linear momentum perpendicular to the track. If the track is tilted, there are net external (gravitational and track-support) forces along and perpendicular to the track and the momenta and kinetic energy will change with time. To the extent that the collision time is very short, these changes will usually be small during collision in comparison with those due to collision forces. (Actually, Newton originally stated his second law using momentum, rather than acceleration : F= p t where p = m v (1) (If m is considered constant (non-relativistic speeds), this becomes =m F a For a system of N particles, we can rewrite this as Fnet = pnet t where pnet =∑ p i = p1 p2 p3. ... pN N (2) or 6/06 Linear Momentum Conservation Fnet∗ t= pnet . The left hand quantity is called the impulse. So the average net (vector) force multiplied by the duration of application gives the change in the system's (vector) linear momentum. This change may either increase, decrease or alter the direction of the initial momentum. In the case we are considering, namely where there are no external forces along the track (level track with no friction) or external forces are very small compared with internal forces, Fnet on the combined system is zero by Newton's Law (cancellation of action-reaction pairs) and the above equation reads pnet =0 t pnet =constant or (3) which states that the linear momentum of a system is conserved, for no net external forces. Note that there may be very strong internal forces, as in a collision or explosion. For a system composed of two masses along a track, we can relate their momentum values before and after the collision as follows. Here we have dropped the vector notation, and adopted the convention that the only directional information needed comes from positive or negative velocity values: i i f f m1 v 1 m 2 v 2 =m 1 v 1 m 2 v 2 (4) (masses 1 and 2, times i ( initial ) and f ( final ). The experiment consists of colliding two carts along a track, while monitoring their velocities with two sonic rangers mounted at opposite ends of the track. If cart masses are correctly input to definitions of P and KE, Logger Pro will calculate and output the real-time momentum and energy values. To provide initial motion, you provide initial external force. We are interested in subsequent motion during the collision. If this interval becomes vanishingly small 6/06 Linear Momentum Conservation (instantaneous collision, not exactly true – see graph below), friction and gravity may be neglected, even for a tilted track. During that interval external forces on the system are small compared to strong internal (action-reaction, equal but opposite) forces. Study two types of collisions: elastic collisions, in which energy is ideally conserved, and inelastic collisions, in which mechanical energy is not conserved (though inclusion of randomized energy would again restore conservation). Linear momentum is ideally conserved for both types of collisions, even when organized mechanical energy is lost. Procedure Make sure the left motion sensor is plugged into DIG/SONIC1 on the LabPro interface, and that the right motion sensor is plugged into DIG/SONIC2. Weigh the carts and weights on the lab scale. If the masses are already labeled, you can use these figures. Make sure both motion sensors are oriented for a horizontal beam, and set sensors to narrow beam. Test spin each cart wheel. Check cart drift for track level. Carts have one Velcro end and one with permanent magnet. Check the LabPro icon. Place the carts together at 100 cm (velcro to velcro). Press Zero. This will ensure that the plots for Distance 1 and Distance 2 converge at the instance the carts collide. (Actually, the distance graphs may cross for a short distance.) Note which cart is on sensor 1 end (follow the Lab Pro Dig/Sonic 1 input). Collisions of cart 1 on stationary 2 should look intuitive – positive p's trend downhill due to friction. Collisions of cart 2 on 1 may appear non-intuitive (negative p's trend uphill toward zero) but they are OK. Best do 1 on 2. Open Linear Momentum Conservation.cmbl. Page 1 shows four graphs, Page 2 contains the data table. Check the definitions of the calculated quantities (everything is calculated except d 1 and d d 2 , which are the measured quantities). Note that you must insert actual masses for every collision into the P and KE definitions. If you don't, your graphs may look more peculiar than usual. But you can correct the mass inputs after the run. 6/06 Linear Momentum Conservation Figure 4 Two carts of equal mass collided on a level track, with repelling magnets opposed. Note the signs of individual velocities and momenta – direction is important. Note the reversals. Study the finite time widths of the collision event. The carts slow, come almost to rest due to magnet repulsion, and then re-separate as the magnets continue to repel. The small bump in total momentum (brown curve) is presumably due to finite sampling time. Note that total kinetic energy (green curve) changes much more. This is mostly a real effect; the kinetic energy is momentarily converted to stored magnetic field energy, which is subsequently released. but some may be due to the calculation of v from d When the velcro end of one cart comes in contact with the velcro end of another cart, adhesion occurs and the carts are stuck together - this produces an inelastic collision (maximal los of kinetic energy). Conversely, putting the non-velcro ends together puts internal magnets of each cart near each other to provide a repulsive force - this produces an elastic collision. Do a few practice runs - put Mass 2 halfway along the track, then position Mass 1 about 15 cm to the right of the left motion sensor. Press Collect in Logger Pro and push Mass 1 to accelerate and hit Mass 2. Push hard enough such that Mass 2 makes it to the other side of the track. If you are doing an elastic collision make sure the carts don't actually make contact, and only experience the magnetic repulsive force, otherwise the 6/06 Linear Momentum Conservation collision will be partially inelastic. In all cases be prepared to catch any carts before they hit a motion sensor. A. Inelastic collision, Mass 1 roughly equal to Mass 2, Mass 2 initially at rest 1. Try to produce a good clean run for an inelastic collision (Velcro to Velcro), with no added mass on the carts and pushing Mass 1 into Mass 2 which is initially at rest. Identify on the graph: a) Point a, where you started pushing the cart b) Point b, where you stopped pushing the cart c) Points c1 and c2, bounding the region where the carts exerted forces on each other (You may observe that the Velcro does not grasp securely, and that there is a little “bounce” immediately after the initial collision. If so, this will probably show up also in your graphs.) Using the Analyze-->Examine feature, or by examining data in the Table, identify the velocities just before the interaction (cart 1and cart 2) and just after the interaction (cart 1 and cart 2). Print (not Print Graph) your graph page, label the various curves on the graph before starting another run, and record run parameters (masses, etc.) on graph. 1) Only if your instructor so directs, calculate on the graph the total momenta at points c1 (shortly before) and point c2 ( shortly after the collision), from your velocity data and masses. (Directions matter – linear momentum is a vector quantity.) Then compare your calculated momenta with the graph values. Discuss whether the collision was elastic or inelastic. Discuss, from the overall energy graph, whether there is evidence of energy loss or gain in the entire run 3. Print (not Print Graph). Mark on your graph (a), (b) and (c1 and c2) above and annotate the graph as directed. B. Elastic collision: mass 1 roughly equal to mass 2, mass 2 initially at rest Repeat Part A for an elastic collision, with no added mass on the carts (magnet to magnet). Carts should not touch. Note that the collision time is finite – KE is converted into PE (magnetic field) , then back. Note, in general, that the total P frequently shows a little upward bump when velocities change rapidly, i.e. during the collision. This may be due to the numerical differentiation and the time spacing of data points. 6/06 Linear Momentum Conservation Print. Write on the graph, or back, your observations concerning conservation laws during the collision and for the entire run. C Elastic collision: mass1 less than mass 2, mass 2 initially at rest Increase Mass 2. Push Mass 1 into Mass 2, initially at rest . Don't forget to change the weight for Mass 2 in the Logger Pro column definitions. It's best to do this before the run, but after is OK. Print. Write on the graph, or back, your observations concerning conservation laws during the collision and for the entire run. D. Elastic collision: mass 1 roughly equal to mass 2, both initially heading towards each other Remove cart weights from Mass 2. Remember to change back the weight for Mass 2 in the Logger Pro column definitions. Push both masses towards each other. Carts should not touch. Print. Write on the graph, or back, your observations concerning conservation laws during the collision and for the entire run. E. Variants: inclined track, etc. Optional, according to instructor's direction. Report: Annotated graphs; additionally as directed by your instructor. The Search for Simplifying and General Interaction Features Momentum conservation derives from the simple fact that the laws of physics do not change as you move from one place to another. 6/06 Linear Momentum Conservation http://theory.uwinnipeg.ca/mod_tech/node40.html As with energy conservation, linear momentum is linked by Noether's theorem with a symmetry, this time of space, instead of time. The equations of physics do not differ if the lab is translated up, down or sideways in free space. But, at Newton's time, these insights of Einstein's era were far in the future. And, while Newton had found a universal description of gravity, no one had any idea about the forces involved in other collisions (they are usually electrical, in everyday life). It was necessary to look for common features experimentally. Energy was defined and recognized, but it did not seem always to be conserved. (The concepts of heat and internal energy, inclusion of which could make the energy budget always balance (omitting Einstein's E = mc2) was also in the future.) The quantity we now call linear momentum was found to be always conserved, regardless of the violence of “internal” forces, as long as there were no external forces (or, approximately, if the duration of external forces was short enough to make little change in momentum). Some idea of the great interest and controversy which occurred in the search for a general and predictive description of mechanical interactions can be seen in the accounts below. “ In 1668, the Royal Society of London requested any scientist who had worked on the subject of collisions to communicate their results. After much discussion of experimental results, two observations stood out. The first was that, in many collisions, a quantity formed by the masses of an object and their velocities was conserved during a collision. In collisions of hard objects people such as the Dutch scientist Christian Huygens (famous for theories on optics) and Christopher Wren (the architect of St. Paul's Cathedral) independently concluded that the product of mass and velocity squared was conserved. The situation was confusing because it appeared as though the relationships found definitely held in some collisions but not in all. Newton cleared up things considerably by doing very careful experiments on collisions between objects made from all kinds of materials. He correctly concluded that the relation m1 v 1 + m2 v 2initial = m1 v 1final + m 2 v 2final initial 6/06 Linear Momentum Conservation was always obeyed in every kind of collision no matter what the colliding objects were made of or what happened during the collision. However, the relation 2 2 2 2 m1 v 1 initial + m2 v 2initial = m 1 v 1 final + m 2 v 2 final holds only in collisions between hard objects. Since the first relation is clearly the more general, Newton developed his second law around the concept of linear momentum, defined as the quantity mv, and usually denoted in physics by the letter p . where the bold indicates that v and p are vectors (specified by both magnitude and direction). Although Newton did not explicitly include the concept of time in his Second Law, Leonhard Euler, a famous mathematician, later wrote down the correct expression for force as F external = dP dt (Adapted from http://dept.physics.upenn.edu/courses/gladney/mathphys/java/sect3/subsection3_1_3 .html 6/06 Linear Momentum Conservation René Descartes Born: 31 March 1596 in La Haye (now Descartes),Touraine, France Died: 11 Feb 1650 in Stockholm, Sweden “ French scientific philosopher who developed a theory known as the mechanical philosophy. This philosophy was highly influential until superseded by Newton's methodology, and maintained, for example, that the universe was a plenum in which no vacuum could exist. Descartes believed that matter had no inherent qualities, but was simply the "brute stuff" which occupied space. He divided reality into the res cognitas (consciousness, mind) and res extensa (matter, extension). In Traité de l'homme (Treatise on Man) (1664) and Passions de l'âme (Passions of the Soul) (1649), he expounded the view that an animal was an automaton lacking both sensation and self-awareness, and that only man was endowed with a soul. Descartes also generalized Harvey's mechanical interpretation of circulation, believing that the heart is an automatic mechanical pump. Descartes also believed that colors were caused by the rotation of "spheres" of light, using the tennis ball as a model of a spinning sphere. Unlike Newton, Descartes believed that 6/06 Linear Momentum Conservation white light was the pristine form. Descartes gave the first formulation of what is now known as Snell's Law of Refraction. Descartes believed that God created the universe as a perfect clockwork mechanism of vortical motion that functioned deterministically thereafter without intervention. Descartes said that the fundamental force of motion was mass times velocity (today known as momentum), not the quantity which Leibniz called vis viva. Although this formulation was correct, Leibniz nonetheless maintained that the measure of a body's "force" was not given simply by the product of mass times velocity, but instead by the product of mass times velocity squared (which is proportional to what is now called kinetic energy). Since the conservation of quantity of motion had become one of the pillars of Cartesian natural philosophy, Leibniz' suggestion that the fundamental quantity of motion was different from the one Descartes had proposed was rejected out of hand by all good Cartesians. A great controversy ensued between the German school of physical thought, which naturally supported Leibniz and the French and English schools, whose Cartesians and Newtonians opposed him. Descartes was the first to make a graph, allowing a geometric interpretation of a mathematical function and giving his name to Cartesian coordinates. Descartes believed that a system of knowledge should start from first principles and proceed mathematically to a series of deductions, reducing physics to mathematics. In Discours de la Méthode (1637), he advocated the systematic doubting of knowledge, believing as Plato that sense perception and reason deceive us and that man cannot have real knowledge of nature. The only thing that he believed he could be certain of was that he was doubting, leading to his famous phrase "Cogito ergo sum," (I think, therefore I am). From this one phrase, he derived the rest of philosophy, including the existence of God.” http://scienceworld.wolfram.com/biography/Descartes.html