Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Equation of state wikipedia , lookup
Conservation of energy wikipedia , lookup
Internal energy wikipedia , lookup
Gibbs free energy wikipedia , lookup
Thermodynamics wikipedia , lookup
Lumped element model wikipedia , lookup
Second law of thermodynamics wikipedia , lookup
Lecture notes for Challenges in the Physics of Life
and Energy, part 1: Energy
dr. R.J. Wijngaarden
November 27, 2013
Contents
1 Energy: units and orders of magnitude
1.1 GETTING A FEELING FOR ENERGY . . . . . . . . . . . . . . . . .
1.2 HUMAN POWER . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 USE OF ENERGY BY MANKIND . . . . . . . . . . . . . . . . . . . .
1
1
2
2
2 The
2.1
2.2
2.3
3
3
5
7
Climate and the Energy crisis
PALEOCLIMATOLOGY . . . . . . . . . . . . . . . . . . . . . . . . . .
PRESENT CHANGES . . . . . . . . . . . . . . . . . . . . . . . . . . .
SOLUTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Earth’s climate and the Sun
3.1 Solar Energy . . . . . . . . . . . . . . . . . . . . . .
3.2 INTRODUCTION . . . . . . . . . . . . . . . . . .
3.3 THE SUN . . . . . . . . . . . . . . . . . . . . . . .
3.3.1 The energy source in the Sun . . . . . . . .
3.3.2 The solar spectrum . . . . . . . . . . . . .
3.4 BLACK BODY RADIATION . . . . . . . . . . . .
3.5 THE GREENHOUSE EFFECT . . . . . . . . . .
3.5.1 Earth without atmosphere . . . . . . . . . .
3.5.2 Earth with a totally absorbing atmosphere
3.5.3 Intermezzo . . . . . . . . . . . . . . . . . .
3.6 TRENDS IN CO2 EVOLUTION . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
8
8
8
9
9
12
14
16
16
18
19
21
4 Transport of heat
4.1 transport of heat by conduction . . . . . . . . . . . . . . . . . . . . . .
4.2 transport of heat by convection . . . . . . . . . . . . . . . . . . . . . .
24
24
26
5 Thermal energy and thermodynamics
5.1 THE IMPORTANCE OF THERMODYNAMICS . . . . . . . . . . . .
5.2 THE IDEAL GAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
31
32
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
CONTENTS
5.2.1
5.2.2
5.3
5.4
5.5
5.6
5.7
5.8
The ideal gas law . . . . . . . . . . . . . . . . . . . . . . . . . .
Pressure as the result of the impact of particles on the container
walls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.3 The root-mean-square (rms) speed of a molecule in an ideal gas
5.2.4 Heat and specific heat . . . . . . . . . . . . . . . . . . . . . . .
5.2.5 Mechanical equivalent of heat . . . . . . . . . . . . . . . . . . .
THE FIRST LAW OF THERMODYNAMICS . . . . . . . . . . . . .
5.3.1 First law . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Application 1 of the first law: Specific heat of an ideal gas revisited
5.3.3 Application 2 of the first law: Closed cycle steam power plant .
5.3.4 Carnot cycle . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ENTROPY AND THE SECOND LAW OF THERMODYNAMICS . .
5.4.1 The second law of thermodynamics and Carnot’s theorem . . .
5.4.2 Entropy: a new thermal potential . . . . . . . . . . . . . . . .
ENGINES DESCRIBABLE WITH IDEAL GASES . . . . . . . . . . .
5.5.1 Stirling engine . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.2 Otto engine . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.3 Gas turbine: Joule cycle . . . . . . . . . . . . . . . . . . . . . .
5.5.4 Heat pumps . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.5 Heat pumps: evaporation-condensation cycle . . . . . . . . . .
REAL GASES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.6.1 Van der Waals gases . . . . . . . . . . . . . . . . . . . . . . . .
5.6.2 Heating of water at constant pressure . . . . . . . . . . . . . . .
5.6.3 Steam turbines . . . . . . . . . . . . . . . . . . . . . . . . . . .
CO2 sequestration . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fuel cells: Engines not subject to Carnot cycle limitations . . . . . . .
5.8.1 Principle of operation of a fuel cell . . . . . . . . . . . . . . . .
5.8.2 Useful thermodynamic potentials . . . . . . . . . . . . . . . . .
5.8.3 Theoretical efficiency of a fuel cell . . . . . . . . . . . . . . . .
5.8.4 Efficiency of real fuel cells. . . . . . . . . . . . . . . . . . . . .
6 Introduction to fluiddynamics for energy
6.1 INTRODUCTION . . . . . . . . . . . . .
6.2 BASIC FLUID DYNAMICS . . . . . . . .
6.2.1 Stationary fluids . . . . . . . . . .
6.2.2 Fluids in motion . . . . . . . . . .
6.2.3 Lift and drag . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
33
35
37
38
40
41
41
43
47
49
56
56
57
64
64
67
68
73
75
77
77
80
82
85
86
86
89
90
90
92
. 92
. 92
. 92
. 96
. 106
7 Water energy: rivers, reservoirs and tides
107
7.1 FLUID DYNAMICS FOR WATER POWER APPLICATIONS . . . . 107
iii
CONTENTS
7.1.1
7.1.2
7.1.3
7.1.4
Euler’s turbine equation
Hydropower from a dam
Tidal power . . . . . . .
Energy from waves . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
107
108
110
118
8 Wind energy
8.1 Wind energy . . . . . . . . . . . . . . . . . . .
8.2 Wind turbines: the Betz limit . . . . . . . . .
8.2.1 Power from kinetic energy of the wind
8.2.2 Change in kinetic energy . . . . . . .
8.2.3 Thrust . . . . . . . . . . . . . . . . . .
8.2.4 Extracted power . . . . . . . . . . . .
8.2.5 Is Betz limit valid for water flow? . . .
8.3 Optimal design of turbine blades . . . . . . .
8.4 Losses . . . . . . . . . . . . . . . . . . . . . .
8.4.1 Too large induction factor . . . . . .
8.4.2 Effect of drag . . . . . . . . . . . . . .
8.4.3 Rotation of the air . . . . . . . . . . .
8.5 Turbine design . . . . . . . . . . . . . . . . .
8.6 Wind properties . . . . . . . . . . . . . . . . .
8.7 Wind farms . . . . . . . . . . . . . . . . . . .
8.8 Other ideas . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
123
123
123
124
126
127
128
130
131
139
139
139
140
144
145
147
147
.
.
.
.
.
.
.
.
.
.
150
150
150
154
155
155
158
158
165
166
178
9 Photovoltaic energy
9.1 The Free-Particle Schrödinger Equation . . . . . .
9.1.1 Free particle in a box . . . . . . . . . . . .
9.1.2 Particle in a finite potential well . . . . .
9.2 Simulating molecules and solids . . . . . . . . . .
9.2.1 Single electron approximation . . . . . . .
9.2.2 The ground state of an -electron system
9.3 Semiconductors . . . . . . . . . . . . . . . . . . .
9.3.1 Impurity states: doping . . . . . . . . . .
9.3.2 p-n junctions . . . . . . . . . . . . . . . .
9.3.3 Photovoltaic cells . . . . . . . . . . . . . .
10 Final Remarks
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
184
iv
Chapter 1
Energy: units and orders of
magnitude
1.1
GETTING A FEELING FOR ENERGY
In this chapter we try to develop a feeling for various energy quantities. This is necessary, because an energy intuition is missing because (1) energy is ubiquitous in the
industrialized nations (2) there is a zoo of units (3) energy and power are mixed up
and (4) energy is very cheap. We illustrate our bad intuition by two examples. The
energy to climb the Kalimanjaro is just which is for a typical person roughly
80 kg × 10 m s−2 × 5700 m = 4 6 MJ. The energy for heating a bathtub is roughly
∆ with the heat capacity of water per kilogram. Thus we find typically
300 kg × 4200 J kg−1 K−1 × 25 K = 315 MJ We need nearly 7 times more energy for
heating the bath! Actually, the amount of energy released when 1 kg of oil is burned
is 42 MJ about what is needed for heating the bath. With an error of ±30% most
hydrocarbons have the same energy content per kilogram. This is, of course because
upon burning both the carbon and hydrogen are oxidized and for all hydrocarbons the
ratio C : H ' 1 : 2. The shorter hydrocarbons have a larger fraction of hydrogen
atoms (because the ends of the molecules have more relative contribution of the middle
is shorter) and thus (because the heat of combustion of hydrogen is 120 MJ kg and
of pure carbon is 32 MJ kg) have a larger heat of combustion. Actually, upon combustion water vapor is formed. If this condenses, the heat of condensation is released.
Due to this, a higher heating value (HHV) is defined, where the heat of condensation
is added to the heat obtained, and a lower heating value (LHV) is defined, where the
heat of condensation is not taken into account (e.g. because the water vapor escapes
through the chimney). Since the volume of a gas at ambient conditions is roughly 103
the volume of a solid of the same compound, 1 m3 of natural gas corresponds roughly
1
CHAPTER 1
to 1 kg of gas and thus one expects an energy content of about 40 MJ kg In fact, for
the Groningen gas it is 35 MJ m3 (because it contains quite some nitrogen), while for
Algerian gas it is 42 MJ m3 . Units that are often used are MWh (mega watt hour)
and toe (tonne of oil equivalent). 1 MWh is 106 W × 3600 s = 3 6 × 109 GJ while 1 toe
corresponds to 41.868 GJ or 11.630 MWh.
1.2
HUMAN POWER
There are many studies concerning the amount of heat and work that can be produced
by the human body. These numbers have of course a rather large variability due to the
variability of man. Typically, a human body in rest emits 50-100 W of thermal power
as a consequence of the chemical processes in the body. The mechanical power can be
estimated from the rule of thumb of mountaineers that one can climb 300m per hour.
For a typical person of 80 kg this implies a power of
=
80 kg × 98 m s−2 × 300 m
=
' 65 W
∆
3600 s
(1.1)
usually, one takes 100 W as a maximum for continuous work. For short duration the
power can be much higher, say by a factor of 5.
1.3
USE OF ENERGY BY MANKIND
In the developed countries, each person uses typically 5 kW continuously. Note that
this corresponds to each person using 5 kW65 W ' 77 slaves! The present total power
consumption of the world is 15.8 TW, but if the total projected world population for
2050, that is 1010 persons, would each use 5 kW the world would need 50 TW, more
than three times as much in less than 40 years! This is what Richard Smalley calls the
terawatt challenge in his famous paper (MRS Bulletin 30 (2005) 412).
2
Chapter 2
The Climate and the Energy crisis
2.1
PALEOCLIMATOLOGY
To try and predict the future, it can be very profitable to study the past. One can
try yo predict the future climate based on the long climate history that is logged in
the earth. There is a large number of data that has logged local weather: (1) tree
rings (2) corals (3) stomatites (4) erosion patterns etc. The science of paleoclimatology
tries to extract the temperature, humidity, prevailing wind etc. from such data. Here
we only briefly mention some results. Temperature is usually deduced from isotope
ratios. For example the average isotopic composition of water is H2 16 O : HD16 O :
H2 18 O = 997680 : 320 : 2000 ppm. The more heavy isotopes have a higher boiling
point and have a smaller diffusion constant. As a consequence, in the net transport
through the atmosphere (driven by solar heating) of water, heavier isotopes tend to
stay at the equator, while lighter ones are driven to the poles. If earth is warmer,
this isotope separation is of course stronger. Empirically, a roughly linear relation was
found between 18 O, defined as
¶
¶
µ
µ
[18 O]
[18 O]
− [16 O]
[16 O]
sample
standard
³ 18 ´
18 O =
(2.1)
[ O]
[16 O]
standard
and local temperature (at high latitude). Therefore such calibrations are also used for
reconstructing paleoclimates. An example of such reconstruction is shown in Fig. 2.1.
Clearly, the CO2 concentration in the past has been much higher that is is now, and
the same holds for the average global temperature. From the figure we also see that we
now live in an epoch with ice ages.
Lets zoom in to more recent times, see Fig. 2.2. Here we see a certain
periodicity, with temperature and CO2 moving in parallel up and down. Unfortunately,
3
CHAPTER 2
zoom
in
now
Tria
ss
Jur
ic
ass
ic
Cr e
tass
eou
s
ho minids
Car
Per
bon
mia
ifer
n
ous
hominids
dinosaurs
Figure 2.1: Past CO2 concentration and indication of temperature from amount of glaciation.
the data cannot resolve whether one precedes the other. All of this plot corresponds to
the ice age epoch at the right hand side of Fig. 2.1, but the peaks correspond to period
where there are few glaciers. Note that we are exactly living at such moment and from
the plot it seems that we may soon see a decrease in temperature!
The variability in temperature etc. is now believed to be due to the so called
Milankovich cycles. This is a variability in the insolation (the amount of sunlight
arriving at earth), due to celestial mechanics. In particular, the earth is a spinning
top with precession and nutation, and earth experiences forces by the other planets,
mainly Jupiter and Saturn. Due to all these mechanisms, the ellipticity or eccentricity
of the orbit changes, the obliquity (angle of the axis of earth with respect to the plane
of orbit) changes and the axial precession changes, leading to the north pole or south
pole having summer at the moment of closest approach between earth and sun. In fact,
a Fourier transform (or rather power spectrum) of Fig. 2.2 clearly shows peaks at the
frequencies corresponding to the effects just mentioned. Since the mechanism behind
the variability of Fig 2.2 is now known, it can be used to predict the future. According
to the IPCC-4 scientists, the next ice age is not to be expected before 30000 y (FAQ
6.1). Of course, the climate can be influenced by other mechanisms, in particular the
CO2 concentration (see below) and albedo. Both of these are presently changed rather
dramatically by mankind.
4
CHAPTER 2
Figure 2.2: The past climate as recontructed from the Vostok ice core data (from Antarctica).
2.2
PRESENT CHANGES
The last half century, human population has been growing extremely fast (super exponential). For 2050 a population of 1010 people is expected. Since the fuel consumption
per capita is also increasing, the fuel consumption is increasing even faster! More than
75% of this energy is currently generated by burning fossil fuels (coal, oil and gas),
thus releasing CO2 into the atmosphere. M. King Hubbert predicted in 1956 that the
maximum oil production would take place around the year 2000. It seems that we have
now just experienced this peak, although this is still debated. It is, however, more
relevant that such a peak exists. And that such a peak is highly problematic: the oil
production is then decreasing while demand is increasing. This has recently led to fast
increases of the price of crude oil. Clearly, we do need other sources of energy, apart
from fossil. We should note, however, that the coal reserves amount to about 1000 year
of current coal use, so we will not run out of fossil fuels altogether very fast.
The large scale burning of fossil fuels has led to a continuous increases in CO2
concentration in the atmosphere, see Fig. 2.3. As we will see in chapter 3, a higher
CO2 concentration leads to more solar energy being captured by earth and thus to extra
heating. Indeed a rise in global temperature has been observed, see Fig. 2.4. Possibly
as a consequence, many glaciers are retreating, the amount of meltwater on the glaciers
of Greenland has increased and the arctic sea ice volume is decreasing. If the decrease
of the arctic sea ice volume continues at the same rate, the arctic will be completely free
5
CHAPTER 2
CO2 (ppm) [75 years smoothed]
400
350
Law Dome Ice Core
Mauna Loa
300
250
1000
1200
1400
1600
Date
1800
2000
http://cdiac.ornl.gov/ftp/trends/co2/lawdome.combined.dat
Figure 2.3: CO2 concentration during the past millenium.
of sea ice by 2050. If the ice of Greenland would melt completely, global sea level would
rise by about 7 meter. The effect om northern Europe, however, will be very limited,
because the ice on Greenland gravitationally attracts ocean water towards the Arctic.
If the ice on Greenland melts, this effect disappears leading to a reduction in sea level
in northern Europe. In addition, the mantle of earth experiences a reduced pressure
and will move upwards. The total of these three effects could be a small reduction
in sea level. Of course, for meting of land ice on Antarctica the opposite holds: the
three effects there all contribute to an increase of sea level in Europe. Global average
sea level has been observed to increase over the last century and currently increases by
about 3 cm per decade. Part of this increase is due to thermal expansion of the oceans
as a consequence of increasing global temperature.
The burning of fuels is consuming oxygen and indeed the oxygen concentration
in the atmosphere is decreasing at a rate of about 20 ppm/y. We now try to understand
this number. The current CO2 emission is 25×1012 kg y−1 . The oxygen in that CO2 was
taken from the atmosphere and hence about 16 × 1012 kg O2 is consumed each year.
We now calculate the amount of oxygen in the atmosphere. Its volume is 88 km ×
4 (6370 km)2 = 4 487 2 × 1018 m3 the weight of 1 m3 air is about 12 kg and 21% of
that is oxygen. Hence there is 12 × 4 523 9 × 1018 × 021 kg = 1 14 × 1018 kg O2 in the
6
CHAPTER 2
Figure 2.4: Change in global average temperature.
atmosphere. Thus the rate of change is:
[O2 ] 16 × 1012 kg y−1
= 140 × 10−6 y−1
[O2 ] 114 × 1018 kg
(2.2)
This is a bit smaller than the observed 20 ×10−6 y−1 but for such a crude
calculation, the result is not bad!
2.3
SOLUTIONS
Both problems, the effects of CO2 on climate and the increasing scarcity of fossil fuels,
can be solved by (1) changing to nuclear or renewable energy ’sources’ and (2) by
energy conservation. These topics are subject of the remaining chapters. In particular
the amount of solar energy arriving at earth is so large that even with current technology
only 156 m2 of photovoltaic cells would be needed per person. This would require a
total area for 1010 persons, that is much smaller than the Sahara. In view of the
intermittency of solar radiation (day-night, summer-winter, clouds) a long term storage
or long distance transport system is needed.
7
Chapter 3
Earth’s climate and the Sun
3.1
3.2
Solar Energy
INTRODUCTION
The average solar power incident on the Earth is approx. 1000 W/m2 or about 100000
TW. This power is far larger than the current world power consumption of ~15 TW.
Currently, ~12 % of the world’s power is supplied by biomass and renewables, while
85% is derived from fossil fuels. Both are the consequence of photosynthesis, in which
plants use solar energy to convert water and carbon dioxide into carbohydrates. While
biomass is not necessarily a net producer of CO2 , the burning of fossil fuels definitely
is. However, biomass is not a good converter of solar energy as the efficiency of biomass
production is low (~0.2 to 2%).
8
CHAPTER 3
Figure 3.1:
The contribution of renewable energy sources has increased from
(1.8%+10.6%+0.1%=12.5%) in 1973 to (2.2%+10%+0.5%=12.7%) in 2005. In percentage
this is not impressive. One should however keep in mind that the total energy consumption
doubled between 1973 and 2005.
A more efficient conversion (~15%) of solar energy directly to electrical power
is provided by photovoltaic (PV) cells. Currently (2004) these provide a peak power of
~2.5 GW that is predicted to rise to ~1000 GW by 2030. The current price of PV cells
is too high to be competitive with fossil or nuclear power, for electricity supply to a
national grid, but is expected to decrease as new systems are developed. However, PV
cells are already very competitive for applications in areas far from a grid. We shall
introduce the physics needed to understand the functioning of PV cells in the second
part of this course. In a third part we shall look at several types of PV cells and solar
thermal collectors.
In this first part of the course, we look at the source of energy of the Sun, the
solar energy spectrum and the Greenhouse effect.
3.3
THE SUN
3.3.1
The energy source in the Sun
At the top of the atmosphere of the Earth one measures that the power radiated by the
Sun is 1366 W/m2 . As the distance between the Sun and the Earth is = 15 × 108
km we conclude that the total power radiated by the Sun is
42 × 1366 = 386 × 1026 W
9
(3.1)
CHAPTER 3
Figure 3.2: The Sun is a star with a diameter of approximately 1390000 km, about 109 times
the diameter of Earth.
Per square meter at the Sun surface the power is
38 × 1026
386 × 1026 ∼
=
= 62 × 107 W m−2
2
18
4
62 × 10
(3.2)
The present world power consumption is 15 TW = 1.5×1013 W. We conclude
thus that an area of 500 × 500 m2 on the Sun produces enough energy to power the
whole population on the Earth. This enormous production of energy is due to a nuclear
process that converts approx. 564 million tons of hydrogen into 560 million tons of
helium per second. This follows directly from Einstein’s famous relation between mass
and energy = 2 .
There are several processes responsible for energy production, but the most
important one is the so-called proton-proton chain reaction explained in Fig. 3.3.
The proton-proton chain reaction is one of several fusion reactions by which stars
convert hydrogen to helium, the primary alternative being the CNO cycle (CarbonNitrogen-Oxygen cycle). The proton-proton chain dominates in stars the size of the
Sun or smaller.
Overcoming electrostatic repulsion between two hydrogen nuclei requires a
large amount of energy, and this reaction takes an average of 109 years to complete at
the temperature of the Sun’s core. Because of the slowness of this reaction the Sun is
still shining; if it were faster, the Sun would have exhausted its hydrogen long ago.
In general, proton-proton fusion can occur only if the temperature (i.e. kinetic
10
CHAPTER 3
1
H 1 H → 2 H e e
e e− → 2 (1.02 MeV)
2
3
Gamma ray
neutrino
H 1 H → 3 He (5.49 MeV)
He 3 He → 4 He 1 H 1 H 12.86 MeV
Proton
Neutron
Positron
Figure 3.3: The proton-proton chain reaction is the main source of energy production in the
Sun.
energy) of the protons is high enough to overcome their mutual Coulomb repulsion.
The theory that proton-proton reactions were the basic principle by which the Sun and
other stars burn was advocated by Arthur Stanley Eddington in the 1920s. At the time,
the temperature of the Sun was considered too low to allow for protons to overcome
their Coulomb barrier. After the development of quantum mechanics, it was discovered
that tunneling of the protons through the repulsive barrier allows for fusion at a lower
temperature than the classical prediction.
1. The first step in the proton-proton chain reaction involves the fusion of
two hydrogen nuclei 11 (1 proton) into deuterium21 (the lower index says 1 proton;
the upper index indicates the number of nucleons, in this case 1 proton and 1 neutron),
releasing a positron and a neutrino as one proton changes into a neutron.
1
1
+ 11 → 21 + + + + 042 MeV
This first step is extremely slow, because both protons have to tunnel through their
Coulomb barrier and because it depends on weak interactions.
2. The positron immediately annihilates with an electron, and their mass
energy is carried off by two gamma ray photons.
− + + → 2 + 102 MeV
3. After this, the deuterium produced in the first stage can fuse with another hydrogen
to produce a light isotope of helium, 32 , i.e. 2 protons and 3 nucleons, in this case 2
protons and 1 neutron),:
11
CHAPTER 3
2
1
+ 11 → 32 + + 549 MeV
4. From here there are three possible paths to generate helium isotope 4He. The most
important is
3
2
+ 32 → 42 + 211 + 1286 MeV
The complete chain reaction releases a net energy of 26.7 MeV. Important is to note
that this energy cannot be used in totality to heat up the Sun. Only the photons can
couple to ions and shake them. This happens because photons are light and light is an
electromagnetic wave. The electric field couples to the charges of the ions.
3.3.2
The solar spectrum
By means of a prism one may divide the Sunlight into a broad spectrum, which displays
the intensity of the light as a function of wavelength . More precisely the quantity
is the energy entering per second per square meter [W/m2 ] with a wavelength
between and + d. The solar radiation as a function of wavelength has thus
[W/m2 /nm] as unit. Note that one nanometer l nm = 10−9 m, and that Id has the
unit [W/m2 /nm] × [nm] = [W/m2 ], i.e. a power per unit area.
The solar spectrum measured on the ground and high above the Earth’s atmosphere are quite different as can be seen in Fig. 3.4. This figure contains a lot of
information. We therefore will read the graph in detail and first focus on the yellow
curve, which represents the solar irradiation measured outside the Earth atmosphere.
The solar light that arrives at the top of the atmosphere has a very broad spectrum
ranging from the ultra violet, ( . 400 nm) abbreviated as UV, to the deep infrared
( 800 nm ) abbreviated as IR. In between is the visible region. An appreciable part
of the incoming Sunlight has wavelengths in the visible region. The radiation at the top
of the Earth’s atmosphere has travelled through empty space between Sun and Earth
and is thus unchanged. It is consequently a fingerprint of the solar spectrum when it
leaves the surface of the Sun. It is reasonable to assume that the structure in that
spectrum is determined by the specific composition of the Sun’s outer layer. In case
the Sun would just be a perfect hot black body (see below) its spectrum would be as
indicated by the black curve. The difference between the black curve and the yellow
one reflects thus the composition of the Sun’s outer layer.
In particular, free atoms may be around of which it is known that they emit
and absorb radiation at specific wavelengths. The little dip at = 400 nm in the
spectrum is for example due to free Ca atoms at high temperature that emit or absorb
at = 393 nm and 397 nm. This is close enough to the observed 400 nm in the figure.
12
CHAPTER 3
Figure 3.4: Spectral irradiance of incident solar radiation outside the atmosphere (yellow)
and at sea level (red). The visible region of the spectrum is indicated with UV (Ultra Violet)
on the left and Infrared on the right. Major absorption bands of some of the important
atmospheric gases are indicated. The emission curve of a black body at 5523 K is shown for
comparison, with its peak adjusted to fit the actual curve at the top of the atmosphere.
A similar dip, a little to the right, at 420 nm is also due to Ca atoms in the outer solar
atmosphere.
The red curve in Fig. 3.4 is the solar irradiation curve at sea level. The fact
that it is lower is due to absorption by the atmosphere and the scattering of Sunlight
by the atmosphere back into space. Only about 70 percent of the incoming Sunlight
reaches sea level. At sea level the solar spectrum exhibits much more structure than
at the top of the atmosphere as a result of absorption by molecules such as H2 O and
CO2 , which absorb over a broad region of wavelengths and particularly in the regions
which are indicated. Note that H2 O and CO2 molecules do not absorb in the visible
region, but in many regions in the Infrared.
Finally, we draw attention to the arrows indicated as O3 ozone. Under natural
circumstances, there is not much ozone at low altitudes, but there is a thin ozone layer
at an altitude of 20 to 30 km. There it does no harm but, on the contrary, protects
living organisms on the Earth from harmful solar UV radiation, as it absorbs Sunlight
with a wavelength shorter than 295 nm. This can be seen on the very left in Fig.
3.4. A decrease in the ozone layer in the upper atmosphere does not only increase
the total amount of UV light of a particular wavelength reaching the Earth, but it
also allows the transmission of increasingly shorter UV radiation. This has important
implications for bio-molecules such as DNA proteins, which are essential for life. They
do absorb Sunlight with wavelengths 300 nm if not blocked by the ozone layer,
and, as a consequence, they are destroyed or malfunctioning. With the thinning of the
13
CHAPTER 3
Figure 3.5: Spectral irradiance spectra of the Sun measured at the top of the atmosphere The
corresponding temperature is then 5777 K. This shows that the temperature of the Sun top
layer is not exactly known but for all practical purposes, we will take it as 5800 K in this
course.
protecting ozone layer, the bio-molecules will become increasingly prone to UV damage
in the future.
3.4
BLACK BODY RADIATION
The black curve in Fig. 3.4 is that of a black body radiating at a temperature of 5523
K. If one fits the measured curve to the black body curve so that the area under both
curves is the same one obtains the results shown in Fig. 3.5
The term ‘black body’ originates from experiments with a black cavity held
at a certain temperature. It appeared to emit a smooth spectrum with the intensity
as a function of wavelength given by the shape of the grey curve. The position of
the peak shifts to lower wavelengths for higher temperatures.
At the beginning of the 20th century, attempts were made to calculate the
spectral shape of black body radiation. In these calculations it was assumed that at
each wavelength all energies could be emitted. There was no relation between wavelength and energy. However, the resulting spectral intensity of the black body radiation
did not correspond to experiment at all. In an historic contribution to quantum mechanics, Planck solved the problem by making the assumption that the energies E of
the electromagnetic field are restricted to
14
CHAPTER 3
=
(3.3)
where f is the frequency of the electromagnetic field and n is an integer (1,
2, 3, . . . .). Note that for light = where is the wavelength corresponding to the
frequency f and c is the velocity of light. The symbol h denotes Planck’s constant,
whose value is
= 663 × 10−34
(3.4)
Later Einstein concluded that the electromagnetic field consists of photons
with energies E = hf. Planck derived the so-called Planck energy distribution for the
radiation IE [in units of W/m2] emitted by the black body with energies between E
and E + dE:
1
2 3
(3.5)
3
2
−1
where T is the absolute temperature of the black body [in degrees Kelvin]
and k is Boltzmann’s constant
k =1.38 × 10−23 J/K
The radiation is also called the radiation flux or briefly, the flux, as it
refers to the radiation (with energy E) passing a square meter per second.
By integrating Eq. 3.5 over all energies, one finds another well-known equation, the Stefan-Boltzmann law. This law expresses how the total amount of energy I
[W/ m2 ] emitted by a black body depends on its temperature T and is given by:
=
( ) = 4 = 567 × 10−8 4 [ W m2 ]
(3.6)
where is the Stefan-Boltzmann constant, which is independent of any material properties,
= 567 × 10−8 4 [ W K4 m2 ]
(3.7)
Every black body with a finite temperature radiates energy according to Eq.
3.7. You too are radiating. With a high sensitivity IR camera one can measure the radiation of a human body as shown in Fig. 3.6 (from http://td-guide.net/thermal/index.html).
The Earth is of course also radiating thermal energy. However, the maximum
intensity occurs at a much higher wave length than that of the direct solar incoming
light that is around 400 nm. The radiation of a black body at temperature of 288 K,
the average temperature of the Earth, is given in Fig 5.22.
15
CHAPTER 3
Figure 3.6: Radiation of a man with glasses holding a match. False colours are used to
visualize the temperature of the emitted radiation. Blue is cold and red is hot. White is very
hot (the flame of the match).
3.5
THE GREENHOUSE EFFECT
The mean surface air temperature on Earth is around 15 C. In the tropics it is somewhat hotter and in the arctic regions somewhat colder. Except in regions with extreme
conditions, most of the Earth is habitable; it supports plant and animal life, which in
turn provides food for the human population.
3.5.1
Earth without atmosphere
Let us make an estimate of the surface temperature of the Earth. On average, it will
be equal to the mean temperature of the air just above the surface with the measured
value of
15 C, i.e. 288 K
In a steady-state situation, the incoming energy must be equal to the outgoing energy, or in the form of an equation, energy in = energy out . We consider
only radiation energy. The amount of radiation entering the atmosphere per m2
perpendicular to the radiation direction is called the solar constant. At the top of the
atmosphere, it is equal to 1366 W/m2 . Looking at the Earth from outer space, it appears that a fraction A, called albedo, is scattered back or radiated back. As illustrated
in Fig. 3.7 an overall amount (1 − ) is reaching the surface per m2 . The Earth
receives thus an amount 2 (1 − ) where R is the radius of the Earth. The total
outgoing radiation from the Earth’s surface is then 42 . In steady state we
must have
2 (1 − ) = 42
(3.8)
In order to estimate the temperature of the Earth we assume now that it
16
CHAPTER 3
Figure 3.7: Solar radiation is entering the atmosphere from the left with [W/m2 ]. A
fraction , called the albedo, is scattered or radiated back. The Earth radiates thermally in
all directions while the Sunlight comes only from one side.
Figure 3.8: About 30% of the incoming solar light is reflected or scattered by the surface of
the Earth.
17
CHAPTER 3
Figure 3.9: Improved model of the Earth with an atmosphere that absorbs all the outgoing
radiation of the Earth. This is of course an extreme case
behaves as a black body of temperature . According to the Stefan-Boltzmann law
4
it produces outgoing radiation
[W/m2 ].
4
2 (1 − ) = 42
(3.9)
We obtain then with S =1366 W/m2
4
4
(1 − ) = 1366 (1 − 03) = 4
= 4 × 567 × 10−8
(3.10)
which leads to = 255 K. Without atmosphere the Earth would thus be
at an average minus18 degree Celsius. There would be no liquid water and probably
no life.
3.5.2
Earth with a totally absorbing atmosphere
The calculated value of 255 K although only 13% wrong (which, by the way is not
bad for such a rough calculation !) is much lower than the observed value of 288 K
corresponding to an average 15 C Earth temperature . The difference of 33 K is due
to the greenhouse effect for which we should be grateful as it makes life possible.
The greenhouse effect is essentially related to the atmosphere that has a selective absorption for radiation of various wavelengths. The incoming sunlight is much
less absorbed by the atmosphere than the outgoing thermal radiation of the Earth.
The absorption bands generated by various greenhouse gases and their impact on both
incoming solar radiation and outgoing thermal radiation from the Earth’s surface are
18
Normalized energy density I
CHAPTER 3
100
80
288 K
5800 K
60
40
20
0
1
10
Wavelength [m]
Figure 3.10: Top panel:The Sun being much hotter than the Earth emits radiation at a much
lower wavelength (typically 500 nm = 0.5 m)) than the Earth (typically around 10 m
(micrometer). The curves are calculated by means of Eq.III.4. Bottom panel: Absorption of
radiation by various molecules in the atmosphere.
indicated in grey. Note that a greater quantity of outgoing radiation is absorbed, which
contributes to the greenhouse effect.
3.5.3
Intermezzo
Quantum mechanics provides the basis for computing the interactions between molecules and electromagnetic radiation. Most of this interaction occurs when the frequency
of the radiation closely matches that of the spectral lines of the molecule, determined
by the quantization of the modes of vibration and rotation of the molecule. The molecules/atoms that constitute the bulk of the atmosphere: oxygen (O2 ), nitrogen (N2 )
and argon (Ar) do not interact with infrared radiation significantly. While the oxygen
and nitrogen molecules can vibrate, because of their symmetry these vibrations do not
19
CHAPTER 3
create any momentary charge separation. Without such a charge separation they can
neither absorb nor emit infrared radiation. In the Earth’s atmosphere, the dominant infrared absorbing gases are water vapor H2 O, carbon dioxide CO2 , and ozone (O3 ). The
same molecules are also the dominant infrared emitting molecules. CO2 and O3 have
“floppy” vibration motions whose quantum states can be excited by collisions at energies encountered in the atmosphere. For example, carbon dioxide is a linear molecule,
but it has an important vibrational mode in which the molecule bends with the carbon
in the middle moving one way and the oxygens on the ends moving the other way,
creating some charge separation, a dipole moment, thus carbon dioxide molecules can
absorb long wave length infrared (IR) radiation. Collisions will immediately transfer
this energy to heating the surrounding gas.
A substantial part of the greenhouse effect due to carbon dioxide exists because
this vibration is easily excited by infrared radiation. Water vapor has a bent shape.
It has a permanent dipole moment (the O atom end is electron rich and the H atoms
electron poor) which means that IR radiation can be emitted and absorbed during
rotational transitions and collisions. Clouds are also very important infrared absorbers.
Therefore, water has multiple effects on infrared radiation, through its vapor phase and
through its condensed phases. Other absorbers of significance include methane, nitrous
oxide and the chlorofluorocarbons.
From Fig. 5.22 follows that direct Sunlight is much less absorbed than the
thermal radiation of the Earth. This means that we have to refine our model and take
the atmosphere into consideration. The simplest model is given in Fig. 3.9. We assume
that the atmosphere absorbs all the outgoing thermal radiation of the Earth. Such an
extreme case could be reached if the amount of greenhouse gases is allowed to reach
very high values.
We proceed as before. An overall amount (1 − ) is reaching the surface
of the Earth per m2 . The Earth receives thus an amount 2 (1 − ) where R
is the radius of the Earth. The total outgoing radiation from the Earth’s surface
is 42 , but the amount 42 is radiated back. Here is the downward
radiation of the atmosphere. In steady state we must have
2 (1 − ) + 42 = 42
(3.11)
The atmosphere (e.g. the clouds) must also be in a steady state. For them
we have
2 =
(3.12)
as the cloud radiate as much downwards to the Earth as outwards to space.
In order to estimate the temperature of the Earth we assume again that it behaves as a
black body of temperature T . According to the Stefan-Boltzmann law it produces
20
CHAPTER 3
Figure 3.11: Atmospheric CO2 at Mauna Loa Observatory (Hawaii). The yearly seasonal
oscillations are due to growing vegetation in Spring and falling leaves in Autumn.
4
outgoing radiation
[W/m2 ].
4
2 (1 − ) + 42 = 42 = 42
4
(1 − ) + 4 = 4
(3.13)
We obtain with S =1366 W/m2 and = 03
4
1366 (1 − 03) = 2 × 567 × 10−8
(3.14)
which leads to = 303 K (or 30 C ), which is much higher than the
observed value of 288 K corresponding to an average 15 C Earth temperature.
3.6
TRENDS IN CO2 EVOLUTION
What we conclude from the calculation in the previous Section is that a temperature
of about 30 C could be reached if the production of greenhouse gases is allowed to
increase massively in future. The present trend is alarming as can be seen in Fig. 3.11
and Fig. 3.12.
The oscillatory behavior of the curve in Fig. 3.11 is due to seasonal variations:
leaves are produced in Spring and fall in Autumn. For more information on climate
changes look at http://www.newscientist.com/article/dn11462
21
CHAPTER 3
CO2 (ppm) [75 years smoothed]
400
350
Law Dome Ice Core
Mauna Loa
300
250
1000
1200
1400
1600
Date
1800
2000
http://cdiac.ornl.gov/ftp/trends/co2/lawdome.combined.dat
Figure 3.12: The Mauna Loa (Hawaii) atmospheric CO2 measurements and Ice Core measurements at Law Dome (Antarctica) are consistent with each other and confirm the exceptionally
rapid increase of CO2 during the last century. There is nowadays consensus that this is due
to human activities, especially to the burning of large amounts of fossil fuels.
The strong increase in CO2 is unlikely to stop in this century as developing
countries all have the ambition to reach a standard of living comparable to that of
industrialized nations. In Fig. V.3 we show that there is a clear relation between
economy and energy consumption. Energy consumption increases until a certain level
of wealth is reached (John Holdren, director of the Program on Science, Technology,
and Public Policy at the Kennedy School, University of Harvard). This shows that
the presently strongly developing countries India and China will follow the same curve.
This is very likely going to lead to a massive increase in energy consumption worldwide.
It is important that the European leaders on Dec.13, 2008 announced they
were leading the world towards a low-carbon future after sealing an ambitious climate
change pact (although at the prize of making generous concessions to the big polluters
in European heavy industry). The climate accord orders Europe to cut greenhouse gas
emissions by 20% by 2020 compared with 1990 levels.
Furthermore, it is also important that Barak Obama has appointed two physicists at key positions in his new administration: John Holdren as science advisor, and
head of the Office of Science and Technology Policy, and Steven Chu (Nobel Laureate
in 1997) as Energy secretary. This shows at least that energy and climate are taken
seriously by politicians.
22
CHAPTER 3
Figure 3.13: Relation between Wealth and Energy Consumption. The GDP is the gross
domestic product at purchasing power parity (PPP) per capita expressed in thousands of US
dollars of 1997.
23
Chapter 4
Transport of heat
Heat energy can be transported from one place to another. This can be used to our
advantage, but it can also represent an important loss mechanism e.g. if we want to heat
our home. In section 3.4 we already encountered one mechanism for heat transport:
(black body) radiation. In this chapter we discuss: transport of heat by conduction
and transport of heat by convection. The last mechanism relevant for our studies is the
rather trivial heat transport due to the transport of mass with a certain temperature.
We will encounter some examples of that later on.
4.1
transport of heat by conduction
We want to derive an equation for the transport of heat due to conduction, that is a
flow of heat. Heat flow
(4.1)
:=
is intuitively proportinal to the area through which the heat flows ("parallel channels")
and to the temperature difference, while it is inversely proportional to the length over
which we have this temperature difference. Hence we assume
= −
2 − 1
= −
(4.2)
This equation can be rigorously derived if we assume that there are small heat
particles (these are e.g phonons in crystals), which move randomly. We thus consider
some random walkers that are distributed in boxes of dimension ∆ along the -axis.
In each box there are () walkers present, each walker carries the same amount of
heat (this can be made more general). In each time step half of these walkers move
left, while the other half moves right (this can also be made more general).
24
CHAPTER 4
Nx
1
2
Nx Δx
1
2
Nx
A
Nx
Δx
Figure 4.1:
If we take the area of the boxes in the direction perpendicular to the -axis to
be , then we can write for the particle current density through the middle separation:
∙
¸
1
1
= − ( + ∆) + ()
2
2
which can be rewritten as
∙
¸
(∆)2 1
( + ∆) ()
=
+
−
2 ∆
∆
∆
∙
¸
1
( + ∆) ()
=
+
−
= −
∆
∆
∆
here is the density of the heat particles. Since temperature is proprtional to heat, the
last equation is equivalent to eq. 4.2.
Now we apply this equation to calculate the heat loss from the surface of
the earth by conduction. At the surface of the earth, the temperature gradient in the
atmosphere is about 10 K km−1 using the heat conductivity of air at 0024 W K−1 m−1
we find from eq. 4.2
= 0024 W K−1 m−1 ×
289 K − 279 K
= 24 × 10−4 W m−2
1000 m
(4.3)
this may be compared with the heat radiated by the surface of the earth
= 567 × 10−8 W m−2 K−4 4 = 567 × 10−8 (289 K)4 = 396 W m−2
(4.4)
to conclude that heat conduction trough the atmosphere is irrelevant.
We now will derive an equation for the diffusion of heat. Consider Fig. 4.2.
Into the volume there is a heat flow ( ) while a flow ( + ) is leaving
te volume. The nett amount of heat that has enetered the volume in a time is given
by
= ( () − ( + ))
(4.5)
25
CHAPTER 4
J(x,t)
J(x+dx,t)
dx
Figure 4.2: Heat flow into and from a volume.
If the temperature of the volume is changed by ∆ then its amount of heat changes
by
=
(4.6)
this change of heat is of course due to the flow of heat . Hene by combining the last
two equations
( () − ( + )) =
(4.7)
hence
1 () − ( + )
1 −
=
(4.8)
2
2
=
=:
2
2
(4.9)
and with eq. 4.2 we find
A solution to this equation is
2
1
( ) = 0 √
− 4
2
(4.10)
as may be verified by substitution. These Gaussian solutions are shown in Fig. 4.3.
They apply to a situation where at = 0 there is a delta function of heat at = 0 As
time progresses, the heat spreads more and more, making the distribution wider and
lower.
Also it may be verified that in the steady state (
= 0) eq. 4.9 implies that
should be linear in For example we have a linear temperature profile in the wall
of a home, see Fig. 4.4.
4.2
transport of heat by convection
If the sun heats the soil, the soil gets hotter than the surrounding air (which absorps
much less solar radiation). As a consequence the air immediately above the soil is also
26
CHAPTER 4
1.0
t=0.1
Temperature
0.8
0.6
0.4
t=1
t=10
0.2
0.0
-10 -8
-6
-4
-2
0
2
4
6
8
10
X-axis
Figure 4.3: Gaussian solutions to the heat diffusion equation.
T1
T2
0
L
Figure 4.4: Heat profile in the wall of a home.
27
CHAPTER 4
L
d
Tatmosphere
Tbubble
Q
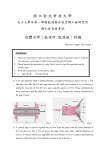
Figure 4.5: An air bubble is heated by the soil and aquires a higher temperature than the
surrounding air.
heated. Heated air rises upwards and thus transports heat to higher altitudes. This
mechanism is called convection and can also take place in a home where the heaters set
up an air flow. Here we calculate the amount of heat transport in the lower atmosphere
due to this mechanism.
Consider the situation of Fig. 4.5. We solve this problem in 3 steps:
First we calculate the Archimedes force on the heated air bubble, then we
calculate its velocity and finally the resulting transport of heat.
The Archimedes force on the heated air bubble is given by the difference
beteen its mass and that of the displaced air. is the volume of the bubble.
Hence:
= ( − )
(4.11)
We now calculate the change in density from the change in volume, caused by
while = +∆
hence
the expansion. For this note that =
−
µ
¶
∆
∆
∆
¢= −
1−
=
=
∆
(4.12)
' 1 − Subsituting eq. 4.12 in eq. 4.11 we
= −
= − ¡
+ ∆
1+
where we used the Taylor expansion
find
1
1+
∆
= ∆
(4.13)
This is an upwards force, which will accellerate the buble upwards. However,
very quickly the friction with the surrounding air (the drag force, eq 6.51) leads to an
equilibium where the drag equals the lift. Hence we find for the steady state:
1
∆ = 2
(4.14)
2
=
28
CHAPTER 4
from which we find the velocity of the rising air bubble:
r
2∆
=
(4.15)
To proceed, we need to know the expansion ∆ due to the heating of the
bubble. Using the ideal gas law
(4.16)
=
and with the definitions ∆ = hot − cold and ∆ = − we find
∆ =
2
∆ = ∆ =
∆
(4.17)
For the last equality we used
= 2
(4.18)
see fig. 4.5, where is the linear dimension in the horizontal plane of the air bubble
and is its thickness. With this we find for the total amount of heat in the bubble
= ∆ =
2
∆ =
∆
(4.19)
where is the molar volume of an ideal gas (about 22.4 liter per mole) and
is its molar specific heat at constant pressure (we assume that the bubble rises over
a modest distance such that the change in pressure with height is unimportant).
The power per area of the soil that is transported by the air air bubble is
given by
1
=
=
(4.20)
∆
where ∆ is time it takes for the bubble to rise to a height .
Substitution of 4.18 in eq. 4.15 and the resulting and of 4.19 in 4.20 yields
with = 2
r
2
=
2
∆
2
2 ∆
2
(4.21)
which can be simplified to
32 (∆ )32
=
12
r
2
(4.22)
Lets now calculate an example. For ∆ = 20 K = 100 m and = 1 m we
find
29
CHAPTER 4
(1 m)32 29 J mol−1 K−1 (20 K)32
=
224 × 10−3 m3 mol−1 (300 K)12 100 m
r
2 · 98 m s−2
= 296 W m−2
1
(4.23)
which may be compared to the heat radiated by the soil: if we take ambient =
300 K + 20 K
= 567 × 10−8 4 = 567 × 10−8 (320)4 = 594 W m−2
Clearly in optimal cases we may have
µ ¶
µ ¶
'
(4.24)
(4.25)
however, usually
µ ¶
µ ¶
' 01
(4.26)
Note that Newtons Law of Cooling
= − · · ∆
(4.27)
= −∆
(4.28)
gives
which is linear in ∆ while in our convection equation, eq. 4.22, ∼ (∆ )32 . Newtons
Law of Cooling is applicable to the cooling of an object due to a smooth air flow, but is
no longer valid if large scale convection due to the cooling takes place. By the way, the
proportionality constant in eq. 4.27 takes a wide range of values in the literature: for
gasses in free convection ranges from 2 − 25 W m−2 K−1 while for forced convection it
ranges from 25 − 250 W m−2 K−1 This might already be an indication of the inaccuracy
of Newtons Law of Cooling for convection.
30
Chapter 5
Thermal energy and
thermodynamics
5.1
THE IMPORTANCE OF THERMODYNAMICS
Thermodynamics is the part of physics that deals with the conversion of one form of
energy into another, especially the conversion of heat into other forms of energy. It is
thus eminently important for a course dealing with energy production, storage and use.
These conversions are governed by two fundamental laws of thermodynamics.
The first of these is essentially a general statement of the Law of Conservation of
Energy, and the second is a statement about the maximum efficiency attainable in the
conversion of heat into work. The second law is especially important as it implies that
even the most perfect machine, for example a machine without any frictional losses, is
incapable to transform completely thermal energy into work.
These laws have to a large extent been discovered because of the technological
significance of steam engines in the nineteenth century. The industrial generation of
mechanical energy from heat motivated a careful examination of the theoretical principles underlying the operation of such engines, which led to the discovery of the Law of
Conservation of Energy and to the recognition that heat is a form of energy transfer.
Steam engines and all other heat engines (internal combustion engine, gas turbines,
Stirling engines,....) do not create energy; they merely convert thermal energy into
mechanical energy, which can be used to perform useful work. They do this transformation with a fundamentally limited efficiency as has been carefully discussed by Sadi
Carnot.
However, while Carnot’s efficiency formula and availability of energy remain
useful concepts, especially in engineering fields, the concept of entropy, which emerged of
31
CHAPTER 5
the analysis of reversible engines, maintains a higher position because of its universality.
The Law of entropy is the Supreme Manager of all natural processes as it tells in which
direction processes occur spontaneously.
The direction of a spontaneous process is not governed by the energy change,
since in many cases the energy of a system does not change during a process. Think for
example of a book falling down from a table. Its potential energy is first transformed
during the fall into kinetic energy, which in turn is transformed into heat and deformation energy when the book hits the ground. However, you never will see that the
molecules in the floor are able in a concerted action to propel the book back onto the
table!!
And this is where the second law comes into play. It says that entropy cannot
decrease in a closed system or that the entropy of the whole universe only increases
and never decreases. This is one of the most profound laws of nature, and should be a
part of every educated person’s world view. It is unfortunate that this law is so widely
misrepresented as simply implying the increase in "disorder".
In this course, we follow a phenomenological approach starting from well established experimental results such as the ideal gas law and the conservation of energy
(related to the notion of internal energy of a system). Then, in a careful analysis of a
reversible engine, the Carnot machine, we arrive at the notion of efficiency and show
that heat can never be transformed 100% into mechanical work. By doing so we will
discover a new fundamental characteristic of a thermodynamic state, which is the entropy mentioned above. After introduction of the Van der Waals law for non-ideal
gases, we are in a position to describe (qualitatively) any engine that transforms heat
into work. We will also discover that there are engines (such as the heat pump) that
have an efficiency much larger than 100% and that fuel cells, which generate electricity
from a chemical reaction, are not subject to the limitation of the Carnot cycle.
5.2
THE IDEAL GAS
The simplest thermodynamic system is the so-called ideal gas. In an ideal gas the
particles, i.e. the individual atoms or molecules of the gas, are well separated, and they
fly about independently. The gas would expand indefinitely if it were not restrained by
the forces exerted by the wall of a container. The gas molecules collide with each other,
but these collisions do not alter the average speeds and average distribution of the gas
molecules in the container. For most purposes, we ignore these intermolecular collisions
and regard the gas as a system of free particles. The motion of the free gas particles
is then very simple: they move with uniform velocity on straight lines, except when
they collide with the walls of the container. However, in spite of the simplicity of their
motion it is obviously impossible to keep track of their individual motion just because
32
CHAPTER 5
under normal conditions 1 cm3 of air contains about 2.7 × 1019 particles. It is simply
impossible to know the initial position and velocity of each individual molecule; and
even if we had, the calculation of the simultaneous motions of such an enormous number
of molecules is far beyond the capabilities of even the fastest conceivable computer.
Under such conditions we need thus to look for a macroscopic description of a
gas using parameters that are easily accessible to measurements. Such parameters are
for example, the temperature T, the volume V, the pressure exerted by the gas on the
walls of the container, the density of the gas and the number of molecules.
In this chapter we describe the macroscopic properties of gases, and we see
how these macroscopic properties are related to the average microscopic properties
of the molecules of the gas.
5.2.1
The ideal gas law
The pressure, volume, and temperature of a gas obey some simple laws. The pressure
is given by the force F that the gas particles exert on an area A of the container wall,
divided by the area A. In other words the pressure p is the force per unit area:
=
(5.1)
The pressure is the same throughout the entire volume of a container of gas.
Consider now n moles of a given gas. A mole of any chemical element (or
chemical compound) is by definition the amount of matter that contains exactly as
many atoms (or molecules) as there are Carbon atoms in 12 g of Carbon. The “atomic
mass” of a chemical element (or the “molecular mass” of a compound) is the mass of
1 mole. Consequently, according to the Periodic Table 1 mole of carbon has a mass
of 12.0 g, 1 mole of oxygen molecules (O2 ) has a mass of 32.0 g, 1 mole of nitrogen
molecules (N2) has a mass of 28.0 g, and so on. For a mixture, such as air (consisting
of 76% nitrogen, 23% oxygen, and 1% argon by mass), the mass of 1 mole is 29.0 g.
We consider now n moles of gas in a container of volume V at a temperature T.
The gas exerts then a pressure p on the walls of the container. From many experiments
one could conclude that p, V and T are related by the Ideal-Gas Law:
=
=
(5.2)
where R is the universal gas constant, which is approximately equal to
= 831 J mol K
33
(5.3)
CHAPTER 5
In 1971, a mole was defined as the number of atoms in 12 grams of
number is approximately
= 6022 × 1023
12
C. This
(5.4)
Today’s best experimental value of Avogadro’s number is 6.022 141 99 × 1023
mol−1 atoms per mole. Similarly, R = 8.314472 J mol K is the best value for the
universal gas constant
From the Ideal-Gas Law, we can calculate one of the three quantities that
characterize the state of the gas (pressure, temperature, volume) if the other two are
known. The temperature in Eq.5.2 is measured on the absolute temperature scale,
and the SI unit of temperature is the degree Kelvin, abbreviated K. Note that the
freezing point of water corresponds to a temperature of 273.15 K, and the boiling point
of water corresponds to 373.15 K; hence, there is an interval of exactly 100 K between
the freezing and the boiling points. A list of typical temperatures is given in the table
below.
Temperature of ...
T (in K)
Interior of hottest stars
109
Center of H-bomb explosion
108
Highest temperature attained in plasma in laboratory 6×107
Center of Sun
1.5×107
Surface of Sun
5.8×103
Center of Earth
4×103
Acetylene flame
2900
Melting of iron
1800
Melting of lead
600
Boiling of water
373
Human body
310
Surface of Earth (average 14 C)
287
Freezing of water
272
Liquefaction of nitrogen
77
Liquefaction of hydrogen
20
Liquefaction of helium
4.2
Interstellar space
3
Lowest temperature attained in laboratory
3×10−8
The zero of temperature on the absolute scale is the absolute zero, T = 0 K.
According to Eq. 5.2, the pressure of the gas vanishes at this point. In reality, as a
result of finite particle-particle interactions in a real gas, the gas will liquefy or even
solidify before the absolute zero of temperature is reached; when this happens, Eq. 5.2
becomes inapplicable. Another gas law must then be used: for example, the Van der
Waals gas law.
34
CHAPTER 5
The Ideal-Gas Law in Eq. 5.2 is a simple relation between the macroscopic
parameters that characterize a gas. At normal densities and pressures, real gases obey
this law quite well; but if a real gas is compressed to a very high density, then its
behavior will deviate from this law. The ideal gas is thus a limiting case of a real gas
when the density and the pressure of the latter tend to zero. The ideal gas may be
thought of as consisting of atoms of infinitesimal size, exerting no forces on each other
or on the walls of the container, except for instantaneous impact forces exerted during
collisions.
The conditions of a temperature of 273 K and a pressure of 1 atmosphere (1
atm pressure = 1.01325 bar = 1.01325 × 105 Pa = 1.01325 × 105 N/m2 ) are called
standard temperature and pressure, abbreviated STP.
The volume of one mole of gas at STP is a useful quantity that is easily
evaluated from Eq. 5.2
=
8.31 × 273
=
m3 = 224 × 10−3 m3 = 22.4 liters
1.01325 × 105
(5.5)
In the last equality, we have used 1 liter = 1000 cm3 = 10−3 m3 . Note that it
makes no difference whether the gas in this calculation is air or any other gas.
The Ideal-Gas Law can also be written in terms of the number of molecules,
instead of the number of moles. The number of molecules per mole is Avogadro’s
number NA. Thus, if the number of moles is n, the number of molecules N is
=
(5.6)
and the Ideal-Gas Law can be written
=
(5.7)
with k = 1.38 × 10−23 J/K
The constant k is called Boltzmann’s constant. As we will see, this constant
tends to make an appearance in equations relating macroscopic quantities (such as p or
V) to microscopic quantities (such as the number N of molecules). This is in particular
the case in Sections 5.2.2 and 5.2.3.
5.2.2
Pressure as the result of the impact of particles on the
container walls
The pressure of a gas against the walls of its container is due to the impact of its
molecules on the walls. We can calculate this pressure by considering the average
35
CHAPTER 5
-v x
vx
L
Figure 5.1: A given particle in the gas flies first to the right, hits the container wall and
bounces back with the same velocity (same magnitude but, of course, opposite direction).
motion of the molecules of a gas contained in a cube of side L. We assume that the gas
molecules collide only with the walls but not with each other, and that the collisions
are elastic. The motion of each molecule can be resolved into x, y, and z components.
Consider now the motion of one molecule in the x- direction.
The component of the velocity in the x-direction is vx and its magnitude
remains constant, since the collisions with the wall are elastic. The time that the
molecule needs to move from one face of the cube to the opposite face is
=
(5.8)
seconds.
This means that the molecule hits a given face of the cube every = 2
When the molecule hits the face, its x-velocity is reversed from + to −. The
momentum of the molecule changes from + to − a and, consequently the net
momentum change is −2 where is the mass of the molecule. Thus, each collision
transfers a momentum +2 to the face of the cube. The average rate at which the
molecule transfers momentum to the face of the cube is thus:
()
2
2
= 2 =
= Force
(5.9)
This average rate of momentum transfer is according to Newton’s law equal
to the average force exerted by this particular molecule on the wall. The total force
exerted by N molecules is
Total force =
36
2
(5.10)
CHAPTER 5
and the pressure on the wall is
2
2
2
=
= 3 =
(5.11)
2
since the volume V of the gas is equal to L3 .
So far, we made the implicit assumption that all the molecules have the same
velocity. This is, of course, not true; the molecules of the gas have a distribution of
velocities. To account for this spread of velocities, we must replace the force due to one
given molecule by the average over all the molecules. We designate this average with a
bar. The pressure is then:
=
5.2.3
2
(5.12)
The root-mean-square (rms) speed of a molecule in an
ideal gas
On the average, molecules are just as likely to move in the x, y, or z-direction. Therefore
the average values of the square of the velocities2 ,2 and 2 are equal. We have then
2 + 2 + 2 = 2
(5.13)
As all three terms on the left hand side of equation are equal, each of them
must be equal to 13 2 . For the pressure we can write
2
2
=
(5.14)
3
We compare now this result for the pressure with the equation of state of the
Ideal-Gas
=
=
(5.15)
to conclude that the average of the square of the speed of a molecule is proportional to the absolute temperature T. We see also that
1 2 1 2 1 2 3
+ + =
(5.16)
2 2 2
2
We say that in the average every molecule carries an energy 12 per translational degree of freedom. A molecule has three translational degrees of freedom.
37
CHAPTER 5
T
Q
Figure 5.2: Addition of heat to a body raises its temperature. The temperature raise ∆T
depends on the experimental conditions imposed on the body.
5.2.4
Heat and specific heat
While temperature is a characteristic of the thermal state of a body, heat is a measure
of thermal energy. More precisely heat is thermal energy transferred from a hotter
body to a colder body. From the previous section follows that the temperature is
directly a measure of the mean energy of a molecule. It is thus logical to expect that
addition of heat (i.e. of energy) to a system will increase its temperature. In the
simplest case, one expects the temperature increase to be proportional to the amount
of added heat Q and inversely proportional to the mass m of the sample. Q is an
energy that used to be indicated in calorie. One calorie is by definition the amount
of energy required to warm 1 g of air-free water from 14.5 ◦ C to 15.5 ◦ C at a constant
pressure of 101.325 kPa (1 atm).
Nowadays Q is measured in Joules. For solids and liquids the specific heat
depends only weakly on the experimental conditions, e.g. whether the experiment is
carried out at constant pressure or constant volume. Experiments are normally done
at constant pressure, as it is very difficult to keep the volume of a solid (or liquid)
constant during heating.
The table below gives the specific heat of typical substances at room temper◦
ature (20 C) and 1 atm, unless otherwise specified. The values give the amount of heat
required to increase the temperature of 1 kg of a given substance by 1 K. For a mass
m of this substance, the amount of heat Q and the increase of temperature ∆T are
related by = ∆ . This merely implies that a large mass or a large temperature
change requires more heat.
38
CHAPTER 5
Figure 5.3: A gas kept at constant volume during heating. The added heat raises the temperature and increases the pressure .
Substance
Aluminum
Brass
Copper
Iron, steel
Lead
Tin
Silver
Mercury
Water
Seawater
Ice at -10 C
Ethyl alcohol
Glycol
Mineral oil
Glass, thermometer
Marble
Granite
[J/kg K]
902
390
390
445
130
230
240
140
4187
3900
2230
2430
2390
2000
840
880
800
Specific heat of an ideal gas at constant volume For a gas it makes a great
difference whether heat is added at constant volume or at constant pressure.
The molar specific heat at constant volume is designated by ; it is the
amount of heat needed to raise the temperature of 1 mole of gas by 1◦ C. The amount
of heat ∆Q required to increase the temperature of n moles by ∆T is given by
= ∆
39
(5.17)
CHAPTER 5
Figure 5.4: A gas kept at constant pressure during heating. The added heat raises the
temperature and increases the volume V as the piston is assumed to move completely freely
in the cylinder.
Specific heat of an ideal gas at constant pressure The molar specific heat at
constant pressure is designated by c p . The amount of heat ∆Q required to increase
the temperature of n moles by ∆T is given by
= ∆
(5.18)
We expect to be larger than because, at constant pressure only part of
this heat will go into a temperature increase of the gas ; the rest will be converted into
mechanical work as the expanding gas lifts the piston. We will return to the specific
heat of a gas in Section 5.3.2.
5.2.5
Mechanical equivalent of heat
Since heat is a form of energy, it can be transformed into macroscopic mechanical
work and vice versa. The transformation of heat into work happens all the time in
your everyday life e.g. in cars, airplanes, steam turbines in an electrical power plant,
etc. The engines needed for the transformation of heat into useful mechanical work
are in general complicated machines. Only a fraction of the thermal energy can be
transformed into mechanical work.
The inverse transformation, that of mechanical work into heat, on the other
hand, does not require any special machinery and is complete. Any loss process such
as friction converts work into heat. Since heat is a form of energy, the calorie is a unit
of energy, and it must be related to joules. The conversion factor between these units
40
CHAPTER 5
Potential
energy
mgz
z
Figure 5.5: The traditional method for the measurement of the mechanical equivalent of heat
is Joule’s experiment.
is called the mechanical equivalent of heat.
The traditional method for the measurement of the mechanical equivalent of
heat is Joule’s experiment shown schematically in Fig. 5.5. A falling weight drives a
paddle wheel in the water in a thermally insulated bucket so that no heat can escape
from it. The turbulence induced in the water raises its temperature. In this process, the
initial gravitational potential energy of the falling weight is converted into a measurable
amount of heat. The experimental results for this conversion of mechanical energy into
heat lead to
1 = 1 = 4187
(5.19)
for the mechanical equivalent of heat.
5.3
5.3.1
THE FIRST LAW OF THERMODYNAMICS
First law
Consider a body to which we add a certain amount of heat Q and on which one performs
mechanical work. You may think of a gas in a container fitted with a piston. The gas has
a given initial volume , pressure , and temperature . Suppose that we compress
the gas to some smaller volume and lower its temperature to some smaller value ;
the pressure reaches a new value . We can reach the final state () from the initial
41
CHAPTER 5
Q
Figure 5.6: Body to which heat Q is added and mechanical work is performed by applying a
pressure p.
state () in many ways. For example, we may first compress the gas and then cool
it. Or else, we may first cool it and then compress it. On the other hand, we may go
through small alternating steps of compressing and cooling. In order to compress the
gas, we must do work on it; and in order to cool the gas, we must remove heat from it.
The work done on the gas (or body, in general) and the heat transferred to
the gas (or body) result in a change ∆ of the internal energy of the gas (body) given
by
∆ = . + .
(5.20)
where . is the amount of heat transferred to the gas and . is the amount
of work done on the gas. In many textbooks one writes Eq. 5.20 as
∆ = −
(5.21)
with the sign conventions that Q is positive if we add heat to the gas and
negative if we remove heat; W is positive if the gas does work on the surrounding
and negative if the surrounding does work on the gas. As this is sometimes a source
of confusion we have added arrows to indicate whether energy is received (.) by the
system or produced (%) by the system. With this convention we could also write Eq.
5.20 as ∆ = . − %
This is the First Law of Thermodynamics:
When several alternative processes involving heat and work are available to
change a system from an initial state characterized by given values of the macroscopic
42
Pressure
CHAPTER 5
Initial
state
Final
state
Volume
Figure 5.7: The fact that the change in internal energy U of a system does not depend on
the process (red or blue paths) chosen to bring the system from a given “initial state” to a
given “final state” means that U is a thermodynamic potential. It depends only on the
parameters characterizing the state of the system and not on the history bringing a system
into a particular state.
parameters to a final state characterized by new values of the macroscopic parameters,
the amounts Q of heat and W of work depend on the process. But the change ∆ in
the internal energy U of the system ∆ = . + . has a well-defined value that does
not depend on the process.
The first law is easily understood intuitively: it just says that the increase in
the internal energy U of a system is equal to the sum of the work performed on the
system and the heat given to the system. The change ∆ is by definition,
∆ = −
(5.22)
where and are the values of the internal energy of the system in
the final and initial state, respectively.
5.3.2
Application 1 of the first law: Specific heat of an ideal
gas revisited
As mentioned above we expect to be larger than because, at constant pressure,
only part of this heat goes into a temperature increase of the gas ; the rest is converted
43
CHAPTER 5
A
p
Figure 5.8: At constant pressure, the gas does work by moving the piston loaded with a
weight that generates the pressure p. The added heat raises the temperature and increases
the volume.
into mechanical work as the expanding gas lifts the piston.
Relation between and By means of the first law we can derive an explicit
relation between and . For this, consider again moles of a gas in a cylinder
with a freely moving piston of area . The heat absorbed by the gas increases the
internal energy of the gas and provides the expansion work % = ∆ . Note that
∆ = ∆ where ∆ is the vertical displacement of the piston.
Thus the increase in internal energy is
∆ = . + . = . − % = . − ∆
(5.23)
With = ∆ this leads to
∆ = ∆ − ∆
(5.24)
In an ideal gas, the energy U depends only on the temperature T. Consequently, if the temperature increment at constant pressure has the same value as the
temperature increment at constant volume, the increase ∆ of the energy must be the
same. We have therefore
∆ = ∆ − ∆ = ∆
From the Ideal-Gas Law we find that, at constant pressure
44
(5.25)
CHAPTER 5
∆ = ∆
(5.26)
∆ − ∆ = ∆
(5.27)
With this
and finally, as expected, is indeed larger than
= +
(5.28)
Calculation of for an ideal gas In Section 5.2.3 we have seen that the average
kinetic energy of a particle in an ideal gas is given by
1 2 1 2 1 2 3
+ + =
2 2 2
2
The internal energy of a gas of N molecules is
(5.29)
3
=
(5.30)
2
Thus, an increase ∆ of the temperature, increases the internal energy by
∆ = 32 ∆ . At constant volume, from the first law, we have = ∆ and thus
3
= ∆
2
which implies, by comparison with Eq. 5.17 that
(5.31)
3
=
(5.32)
2
Note that the specific heat of an ideal gas is thus not depending on temperature. From Eqs. 5.32 and 5.28 follows then that
5
=
2
(5.33)
Diatomic gases All the relations derived above are valid for monatomic gases for
which the atoms are treated as point like particles. A point-like particle has 3 degrees
of freedom, the kinetic energies associated with the movement in x, y and z directions.
This is clearly showing up in the relation
1 2 1 2 1 2 3
+ + =
2 2 2
2
45
CHAPTER 5
Figure 5.9: Left: The two rotations of a diatomic molecules that carry kinetic energy. Right:
The vibrational motion of a diatomic molecule carries potential as well as kinetic energy
As none of the directions plays a special role, we have that
1 2 1 2 1 2
(5.34)
= =
2 2 2
For gases consisting of molecules, there are additional degrees of freedom: the
molecules can rotate and vibrate.
Rotations and vibrations Diatomic gases, which consist of two-atom molecules,
such as N2 and O2 store an additional amount of energy in the internal motions of the
atoms within each molecule. The molecules of these gases may be regarded as two pointlike particles connected together (a dumbbell; see Fig. 5.9). If such a molecule collides
with another molecule or with the wall of the container, it usually starts rotating about
its center of mass. We therefore expect that, on the average, an appreciable fraction
of the energy of the gas will be stored in the form of this kind of rotational kinetic
energy. The molecule may rotate about either of the two axes through the center of
mass perpendicular to the line joining the atoms. The rotation around an axis parallel
to the line joining the atoms (taken as the x-axis) does not carry any significant amount
of energy. We have thus only two rotation energies
and
.
In addition of rotations the molecule can also vibrate. The energy of the vibrating
molecule consists of a potential energy
1
= 2
(5.35)
2
with K the spring constant and u its deformation and a kinetic energy
1
= 2 × 2
2
46
(5.36)
CHAPTER 5
In analogy with Eq.5.34 we expect that each of the rotation degrees of freedom and
each of the vibrational degrees of freedom will, in average, carry the same energy.
This expectation turns out to be true and is the basis of the so-called equipartition
theorem.
The equipartition theorem states that:
Each translational, rotational or vibrational component of the random thermal
motion of a molecule has an average kinetic energy of 12 .
According to this theorem, the total average energy of one molecule is
1 2 1 2 1 2
7
+
+
+
=
+ + +
(5.37)
2
2
2
2
This is true at high temperatures, typically 400◦ C or more. At usual temperatures,
however, only the 3 translational kinetic terms and the 2 rotational terms are “excited”.
The vibrational terms are “dormant” and do not obey the equipartition theorem. This
is not too surprising, as the equipartition theorem does not consider quantum effects.
For practical situations, we will therefore take the total average energy of one molecule
as
1 2 1 2 1 2
5
+ + +
(5.38)
+
=
2
2
2
2
The energy of all the molecules of the diatomic gas taken together is then
5
(5.39)
=
2
Thus, an increase ∆ of the temperature increases the internal energy by ∆ =
5
∆ . At constant volume, from the first law, we have = ∆ and thus
2
5
= ∆
(5.40)
2
which implies that
and
5.3.3
5
=
2
(5.41)
7
=
2
(5.42)
Application 2 of the first law: Closed cycle steam power
plant
In order to convert heat into useful work in a steam power plant, the working fluid
undergoes a change of phase at different stages in a closed cycle (i.e. the working fluid
is re-used), from liquid water, to a two-phase mixture of water and steam, to dry steam,
and back to liquid water (see Fig. 5.10). The key stages in the cycle are:
47
CHAPTER 5
Figure 5.10: A steam power plant in Iceland. On the bottom I indicate a somewhat more
realistic diagram of a closed cycle power plant than in the book (top right). Bottom right: a
Siemens steam turbine.
1. Compressor : Work W done on the system to compress cold water
from subatmospheric pressure to high pressure.
2. Boiler: Heat 1 = is added to the system to convert cold water into
steam.
3. Turbine: Work done by the system (i.e. by the steam) on the
turbine blades.
4. Condenser: Heat 2 = lost from the system to the environment
in converting steam back to cold water.
After each complete cycle, the working fluid has the same internal energy U, so
the net change in internal energy is zero, or ∆ = 0. By the first law of thermodynamics
we have
´
¡ .
¢ ³ %
.
.
.
%
.
+
+
+
=
−
−
∆ = .
−
=0
(5.43)
The efficiency of the process is
48
CHAPTER 5
(1) Isothermal
expansion at T1
(3 ) isothermal
compression at T2
T1
T2
(2) adiabatic
expansion to T2
(4) adiabatic
compression
to T1
Figure 5.11: The four steps in a Carnot cycle. Isothermal means that the temperature is kept
constant. Adiabatic means that no heat is exchanged with the surrounding.
=
%
.
−
.
%
− %
=
=
1
−
1
.
.
.
(5.44)
The fact that the efficiency is smaller than 100% is a consequence of the
Second law of thermodynamics. We will discover this second law after having
considered the simplest possible reversible thermal engine, the Carnot engine.
5.3.4
Carnot cycle
The ideal engine considered by Carnot plays a pivotal role in the development of thermodynamics. The 4 steps of a Carnot cycle are shown in Fig. 5.11.
In a temperature-versus-volume plot, the Carnot cycle starts with an horizontal line as the expansion occurs at a constant temperature 1 . Note that to maintain
the temperature constant in an expansion process it is necessary to add heat. The next
step is also an expansion but now without adding any heat. The consequence is that
the temperature drops to 2 . In the third step one reduces the volume of the gas at
constant temperature. This means that a certain amount of heat is flowing out of the
gas. The cycle is closed with an adiabatic compression. We will see later how well a
Carnot cycle is reached in actual engines.
In Fig. 5.13 the Carnot cycle is shown in a pressure versus volume plot. The
advantage of this sort of plot is that the area enclosed by the green curve (with the
49
CHAPTER 5
Figure 5.12: The four steps of the Carnot cycle represented in a temperature versus volume
diagram. The two adiabatic steps are calculated in Section VIII.4.3.
Figure 5.13: The four steps of the Carnot cycle represented in a pressure versus volume
diagram
50
CHAPTER 5
a
pa
T1
Q1
b
pd
d
c
Q2
T2
VaVd
Vb
Vc
Figure 5.14: The total mechanical work performed during a cycle is equal to the green area. In
order to calculate this work we need to evaluate the integrals of pdV along the two isothermal
and the two adiabatic branches of the cycle.
4 arrows) is equal to the work done by the gas. The difference in shape between
the isothermal steps a-b and c-d on one hand and the adiabatic steps b-c and d-a is,
however, not as evident as in a temperature versus volume graph.
We show below that the total mechanical work produced during one Carnot
cycle is
R
R
R
R
+ ³
´ + ³+ ´ =
(5.45)
= 1 ln + 2 ln
Mechanical work along an isotherm Consider a gas in a cylinder with a piston in
thermal contact with a huge thermal bath at temperature T. The volume of the gas is
increased by an infinitesimally small amount dV The good thermal contact between the
gas and the thermal bath guarantees that the temperature of the gas remains constant.
This is only possible if heat is flowing from the bath to the gas.
From the first law we have
= −
51
(5.46)
CHAPTER 5
pa
a
T1
pb
b
Va
Vb
Figure 5.15: Heat must be supplied during expansion at constant temperature.
= +
(5.47)
= +
(5.48)
(5.49)
The total amount of heat supplied between state a and b at constant temperature (i.e. = 0) is the integral
µ ¶
Z
.
(5.50)
= 1 ln
1 =
R
with .
1 =
Nota bene: Along the isotherm, we change the pressure and volume in a
series of infinitesimal steps. For each step an infinitesimal amount of heat is required to
maintain the temperature constant. There is also an infinitesimal amount of mechanical
work involved. The reason for using a round- instead of simply a d is that the amount
of heat involved depends on how heat is transferred to the gas. The volume V and the
internal energy U are on the contrary state characteristics that do not depend on how
a given state has been reached.
= =
52
CHAPTER 5
pb
b
pc
c
Vb
Vc
Figure 5.16: This is the second step in the Carnot cycle. By definition Q=0 during an
adiabatic process.
Mechanical work during an adiabatic change By definition there is no heat
exchange involved in an adiabatic process. Thus,
= + = 0
(5.51)
= −
(5.52)
The mechanical work is
Z
= ( − ) = (2 − 1 )
(5.53)
Volume change during an adiabatic change By definition, there is no heat
exchange involved in an adiabatic process. Thus,
= + = 0
(5.54)
= −
(5.55)
= −
= −
53
(5.56)
(5.57)
CHAPTER 5
Vb Va
Vc Vd
a
pa
V
T
cV ln 1 R ln d
T2
Va
pd
Vb Vc
Va Vd
T
V
cV ln 2 R ln b
T1
Vc
b
d
c
VaVd
Vb
Vc
Figure 5.17: Pictorial summary of the derivation of Eq.III.41
After integration, we have
µ ¶
µ ¶
1
ln
= − ln
2
(5.58)
Relation between volumes in a Carnot cycle The 4 volumes taken by the gas
at points a, b, c and d are related to each other. From Eq. 5.58 and the corresponding
relation
µ ¶
µ ¶
2
ln
= − ln
(5.59)
1
follows directly that
µ
¶
=
µ
¶
(5.60)
Relations between
´ heats involved in a Carnot
³ the
³ ´cycle From Eq. 5.50 we
.
.
have 1 = 1 ln and similarly 2 = 2 ln . Note that because is
smaller than the heat .
2 0 , which means that heat is actually leaving the gas
involved in the Carnot cycle.
³ ´ ³ ´
Combining these relations with = leads to the remarkable relation
54
CHAPTER 5
Vb
Va
a
V
Q1 nRT1 ln b
Va
pa
Q1
Q
Q
2 2
T1
T2
T2
b
pd
Vc
Vd
d
c
V
Q2 nRT2 ln d
Vc
VaVd
Vb
Vc
Figure 5.18: Pictorial summary of the derivation of Eq. 5.62
.
%
1
= 2
1
2
(5.61)
.
.
1
+ 2 =0
1
2
(5.62)
which can be written
This means that the combined quantity (Heat/Temperature) when summed
over a whole Carnot cycle does not change. This observation has a profound implication
and leads to the concept of entropy developed later in this chapter. First, however,
we focus our attention on a technologically essential parameter, the efficiency.
Efficiency of a Carnot engine By definition the efficiency is the ratio of “what
you get” divided by “what you pay” . In a Carnot cycle you get the total mechanical
work
µ ¶
µ ¶
µ ¶
1 ln
+ 2 ln
= (1 − ) ln
(5.63)
55
CHAPTER 5
and you “pay” the heat .
1 = 1 ln
by
³ ´
. The efficiency is thus given
³
³ ´´
(1 − 2 ) ln
2
³ ´
=
=1−
1
1 ln
(5.64)
The efficiency of the Carnot engine depends only on the temperatures of the
two thermal baths. The fact that the efficiency is smaller than 1 (i.e. smaller than
100%) is at first sight not surprising. No machine is perfect: there are always heat
losses, friction, etc. Note, however, that we have not considered any of these loss
processes. Carnot’s machine is ideal and nevertheless it does not have 100 % efficiency.
This is related to a fundamental law, the Second Law of Thermodynamics.
5.4
ENTROPY AND THE SECOND LAW OF
THERMODYNAMICS
As we saw in the preceding sheet, a Carnot engine operating with an ideal gas as
working fluid has an efficiency lower than 100% although it is ideal. It cannot convert
all the heat into work and instead produces some waste heat. The Second Law
of Thermodynamics asserts that this is a fundamental limitation which limits the
efficiency of all heat engines.
5.4.1
The second law of thermodynamics and Carnot’s theorem
This law may be stated in the following deceptively simple way:
An engine operating in a cycle cannot transform heat into work without any
effect on its surroundings.
From this law follows immediately Carnot’s theorem that:
The efficiency of any heat engine operating between two heat reservoirs of
high and low temperature is cannot be greater than the efficiency of a Carnot engine; in
addition, the efficiency of any reversible engine is the same as that of a Carnot engine.
The proof of these statements, known as Carnot’s theorem, is by contradiction
(see Fig. 5.19). Imagine that some heat engine is more efficient than a Carnot engine,
so this engine converts heat from a reservoir at a high temperature into work and ejects
only a small amount of waste heat into a reservoir at low temperature. We can then
use the work output of this engine to drive a Carnot engine in reverse (this is possible
since a Carnot engine is by definition reversible), and thereby pump the waste heat
56
CHAPTER 5
T1
Super
Carnot
engine
Carnot
engine
T2
Figure 5.19: Arrangement used to prove that the efficiency of any engine is never greater than
that of a Carnot engine
from the low-temperature reservoir to the high-temperature reservoir. By hypothesis,
the given engine is more efficient than the Carnot engine; hence only part of its work
output is needed to drive the reversed Carnot engine and return all of the waste heat
to the high-temperature reservoir. The remainder of the output constitutes available
work. The net effect of the joint operation of both engines is the complete conversion
of heat into work, without waste heat, in contradiction to the Second Law. We can
avoid this contradiction only if the efficiency of any engine is never greater than that
of a Carnot engine.
Can you show that the efficiency of any reversible engine cannot be smaller
than that of a Carnot engine ?
5.4.2
Entropy: a new thermal potential
To introduce the concept of entropy we remember that for a Carnot cycle we have
derived the remarkable relation
.
.
1
+ 2 =0
(5.65)
1
2
Is it possible to generalize this relation for any cycle ? To demonstrate that this
is possible we consider the arbitrary cycle in Fig. 5.20 Any cycle of a reversible engine
can be approximated by a set of infinitesimal Carnot cycles. For each infinitesimal
Carnot cycle we have
57
Pressure
Pressure
CHAPTER 5
V o lu m e
V olu m e
Figure 5.20: Any reversible cycle can be represented as the sum of infinitesimal Carnot
processes. One specific “infinitesimal” Carnot cycle is indicated in blue in the right panel.
.
.
1
2
+
=0
1
2
(5.66)
Thus, for the whole cycle
I
.
=0
(5.67)
Let us now pick a given initial state and a final state and go from the initial
state to the final state along two different paths in the p-V diagram as indicated in
H .
Fig. 5.21. From = 0 follows that
Z
Z
I
.
.
.
=
−
=0
(5.68)
1
2
and consequently,
Z
1
.
=
Z
2
.
=0
One defines the change ∆ in entropy as follows:
Z
.
∆ = − =
(5.69)
(5.70)
The change in entropy ∆ does not depend on the way a system is brought
58
Pressure
CHAPTER 5
Initial state i
Path 1
Path 2
Final state f
Volume
Figure 5.21: Two paths in a p-V diagram to bring a system from initial state i to final state
f.
from an initial state to a given final state. One says that the entropy is a thermodynamic potential.
Thermodynamic potentials So far we have seen that:
• Pressure p, temperature T and volume V are state variables.
• The internal energy U is uniquely determined for a state with given p, V and T
• The entropy S is also uniquely determined for a state with given p, V and T
One can construct other thermodynamic potentials. For example U-TS, U+pV,
U-TS+pV... They are uniquely determined for a state with p, V and T. There
is in fact an infinite number of ways to construct thermodynamic potentials. Most of
them are, however, of no use. Can you discover, for example, why U+pV is much more
useful than U-pV or U+3pV.....?
The thermodynamic potential U+pV is called the enthalpy and is designated
by the letter H.
Expansion at constant pressure The usefulness of the enthalpy is that at
constant pressure the heat supplied to a system is equal to the change in its enthalpy.
59
CHAPTER 5
Q
Figure 5.22: When the heat . is supplied to the gas under constant pressure its volume
increases by the small amount dV
This is for example what happens in boilers in which heat is fed at constant pressure.
To see that, we consider first a gas that is free to expand at constant pressure
According to the first law we have
= . −
(5.71)
. = + =
= ( + )
=
(5.72)
Thus, at constant pressure,
The total heat . supplied in a process that brings the system from an initial state to
a final state is then
. = −
(5.73)
The attractiveness of this relation is that it is so simple. This is obviously not the case
for a potential such as H’ = U+3pV. Following the same steps as above we would find
that
0 = ( + 3 ) = + 3 = . + 2
(5.74)
which is not particularly attractive !
Adiabatic expansion at constant pressure Another example of the
usefulness of the enthalpy is provided by considering the following situation. Under
adiabatic conditions a gas moves from the inlet on the left in Fig. 5.23 to the outlet on
60
CHAPTER 5
Q 0
p2 constant
p1 constant
Wturbine
Figure 5.23: Adiabatic expansion of a gas passing through a turbine.
Q 0
p2 constant
p1 constant
Figure 5.24: Enthalpy difference along a capillary
the right after having rotating the blades of a turbine. The pressure of the gas is kept
constant on both sides during the expansion.
From the first law we have since there is no heat involved (i.e. adiabatic process)
.
∆ = 2 − 1 = −2 ∆2 − (−1 ∆ )1 +
(5.75)
.
= 2 + 2 2 − (1 + 1 ) = 2 − 1
(5.76)
In this case the difference in enthalpy is equal to the work produced by the turbine.
Note that 2 − 1 0.
If there is no turbine but, for example, only a capillary, then no work is extracted and
the change in enthalpy is zero.
We have then
2 − 1 = 0
61
(5.77)
CHAPTER 5
Entropy revisited Nineteenth-century engineers established that perpetual motion
machines, which earlier inventors had sought to build, are impossible.
A perpetual motion machine of the first kind is a (hypothetical) device
that supplies an endless output of work without any input of fuel or any other input
of energy. The First Law of Thermodynamics, or the Law of Conservation of Energy,
directly tells us of the failure of such machines.
A perpetual motion machine of the second kind is a device that extracts
thermal energy from some heat source, such as air or the water of the ocean, and
converts it into mechanical energy. Such a device is not forbidden by conservation
laws. The oceans are enormous reservoirs of thermal energy; if we could extract this
thermal energy, a temperature drop of just 1◦ C of the oceans would supply the present
energy needs of the entire world for the next 10000 years! However, the Second Law
of Thermodynamics tells us that conversion of heat into work requires not only a heat
source, but also a heat sink. Heat flows out of a warm body only if there is a cooler
body that can absorb heat. If we want heat to flow from the ocean into our machine,
we must provide a low-temperature heat sink toward which the heat will tend to flow
spontaneously.
In his book “Understanding the Complexity, Uncertainty and Pollution in our
World” Jack Hokikian says: As a student, I read with advantage a small book by F.
Wald entitled “The Mistress of the World and her Shadow.” These meant energy and
entropy. In the course of advancing knowledge the two seem to me to have exchanged
places. In the huge manufactory of natural processes, the principle of entropy occupies
the position of manager, for it dictates the manner and method of the whole business,
whilst the principle of energy merely does the bookkeeping, balancing credits and debits.
It is not the purpose of this course to dwell at length on these aspects of
entropy (this will undoubtedly happen in a future course on Statistical Physics and
Thermodynamics). But, with one example, that of heat conduction, I just want to
illustrate the Second Law of Thermodynamics.
Entropy and heat conduction Consider a hot thermal reservoir at a temperature
1 = 400 K that is briefly put in thermal contact with a cold reservoir at 2 =300 K .
If 100 J of heat flows from the hot reservoir to the cold reservoir, what is the change
of the entropy of the system consisting of both reservoirs? To answer this question we
must find a reversible way to extract 100 J from the hot reservoir and add 100 J to
the cold reservoir. This is possible by using two Carnot engines (that are by definition
reversible). Note that finding a reversible way to transport the 100 J from 1 to 2 is
necessary because of the definition of the entropy
Z
.
− =
(5.78)
62
CHAPTER 5
T1
T1
Carnot
engine
To
T2
T2
Carnot
engine
Q1
Figure 5.25: left panel: When a hot reservoir is coupled to a cold reservoir heat flows spontaneously from hot to cold. Everyday experience that this process is irreversible.
right panel: the same amount of heat can be reversibly transferred between hot and cold
by using two Carnot engines so that ∆1 = ∆. Note that the change of entropy of the
intermediate heat bath at temperature is zero.
where .
is the reversibly added heat to the system at temperature T .
One of the Carnot engines operates between the hot bath and an auxiliary
bath at a temperature 0 . The second one is coupled between the baths at 0 and
2 . The change of entropy is then −100 J400 K + 100 J300 K = 008 J K. Note that
the entropy of the system has increased although no heat has been exchanged with the
surrounding. One finds in general that entropy is always increasing in an irreversible
process such as heat conduction.
For reversible processes the entropy remains constant as ∆ = 0 because
∆ = 0. For irreversible processes the entropy of a closed system (i.e. without heat
exchange with the surrounding) is always increasing. This led to new formulations of
the Second Law.
A new formulation of the Second Law of Thermodynamics There are many
ways of stating the second law of thermodynamics, but all are equivalent in the sense
that each form of the second law logically implies every other form. One form that
mentions explicitly entropy is the following:
In a system, a process that occurs will tend to increase the total entropy of the
universe.
Thus, while a system can undergo some physical process that decreases its own
entropy, the entropy of the universe (which includes the system and its surroundings)
must increase overall. (An exception to this rule is a reversible or "isentropic" process,
such as frictionless adiabatic compression.) Processes that decrease the total entropy of
63
CHAPTER 5
the universe are impossible. If a system is at equilibrium, by definition no spontaneous
processes occur, and therefore the system is at maximum entropy.
An alternative formulation of the Second Law of Thermodynamics asserts that
The entropy of a closed system can never decrease.
The increase of entropy in closed systems was illustrated in the preceding
example on heat conduction.
5.5
5.5.1
ENGINES DESCRIBABLE WITH IDEAL GASES
Stirling engine
The Stirling engine was conceived in 1816 by the Reverend Robert Stirling. In his
engine a gas is sealed in a cylinder and alternately heated and cooled. In the process,
it drives a piston, which is connected to a crankshaft that drives a generator. The heat
supply is external and the cold side can be an air-cooled heat exchanger. The internal
pressures are lower than in a steam engine. But it is slow to warm up, less compact than
a steam engine, and requires precise machining, and as a result was never competitive.
However, it has several attractive features: it is very quiet; it can be made to run very
reliably; it has high thermal efficiency; it has a completely external heat supply; and it
has no emissions. As a result it has already found important applications in submarines
and in space (NASA Stirling engine).
It is now an essential part of large solar power plants. In 2005 Southern
California Edison and Stirling Energy Systems, Inc. agreed to set up 20 000 solar
concentrating dishes in an array covering an area of 19 km2 . This array is designed to
generate 500 MW, the equivalent of a small nuclear power plant. Each dish has an area
of 90 m2 . The dish focuses the sunlight on to a small area on the hot side of a 25 kW
Stirling engine. The conversion efficiency is close to 30%.
The small Stirling engine used in the lecture features just one working cylinder
and a displacer cylinder with a hot end and a cool end. The working gas is transferred
from one end of the displacer cylinder to the other by a device called a “displacer”. The
displacer resembles a large piston, except that it has a smaller diameter than the cylinder, thus its motion does not change the volume of gas in the cylinder - it merely
transfers the gas around within the cylinder.
Expansion (1). At this point, most of the gas in the system has just been
driven to the hot end of the cylinder. The gas heats and expands driving the piston
outward.
Transfer (2). At this point, the gas has expanded. Most of the gas is still
located in the hot end of the cylinder. Flywheel momentum carries the crankshaft the
next quarter turn. The bulk of the gas is transferred around the displacer to the cool
64
CHAPTER 5
Figure 5.26: Some of the dishes of Stirling Energy Systems that Southern California Edison
is planning to use for a 500 MW, 19 km2 , solar power plant to open some time after 2009.
(sandia.gov)
Figure 5.27: Small Stirling engine demonstrated in the lecture. The hot plate is at the bottom
of the engine. The cold plate is the top blue plate. The Stirling engine is a closed system
engine. There is no exchange of air with the atmosphere. In the practicum we have set up
Stirling engines for you to explore the efficiency of this type of engine.
65
CHAPTER 5
hot
cold
displacer
1
2
3
4
5
6
Figure 5.28: The various steps of a Stirling cycle.
66
CHAPTER 5
Figure 5.29: Two examples of internal combustion engines.
end of the cylinder.
Contraction (4). Now the majority of the expanded gas has been shifted to
the cool end. It contracts, drawing the piston inward.
Transfer (5). The contracted gas is still located near the cool end of the
cylinder. Flywheel momentum carries the crank another quarter turn, moving the
displacer and transferring the bulk of the gas back to the hot end of the cylinder.
5.5.2
Otto engine
The four-stroke engine was first patented by Eugenio Barsanti and Felice Matteucci in
1854, followed by a first prototype in 1860. However, the German engineer Nicolaus
Otto was the first to develop a functioning four-stroke engine, which is why the fourstroke principle today is commonly known as the Otto cycle and four-stroke engines
using spark plugs often are called Otto engines.
The four strokes of the Otto cycle are intake, compression, power, and exhaust. Each corresponds to one full stroke of the piston, therefore the complete cycle
requires two revolutions of the crankshaft to complete.
Intake. During the intake stroke, the piston moves downward, drawing a
fresh charge of vaporized fuel/air mixture. The illustrated engine features a ’poppet’
intake valve which is drawn open by the vacuum produced by the intake stroke. Some
early engines worked this way, however most modern engines incorporate an extra
cam/lifter arrangement as seen on the exhaust valve. The exhaust valve is held shut
by a spring (not illustrated here).
Compression. As the piston rises the poppet valve is forced shut by the increased cylinder pressure. Flywheel momentum drives the piston upward, compressing
67
CHAPTER 5
Intake
Compression
Power
Exhaust
Figure 5.30: The Otto Cycles
the fuel/air mixture.
Power. At the top of the compression stroke the spark plug fires, igniting
the compressed fuel. As the fuel burns it expands, driving the piston downward.
Exhaust. At the bottom of the power stroke, the exhaust valve is opened by
the cam/lifter mechanism. The upward stroke of the piston drives the exhausted fuel
out of the cylinder.
The Otto Cycle consists of adiabatic compression, heat addition at constant
volume, adiabatic expansion and rejection of heat at constant volume.
5.5.3
Gas turbine: Joule cycle
Gas turbine are used in the great majority of aircrafts. One distinguishes turboprop
and turbofan turbines.
Turboprop turbine The turboprop is similar to the turbojet, except that most
of the nozzle gas pressure drives the turbine shaft — by the time the gas gets past the
turbine, there’s very little pressure left
to create thrust. Instead, the shaft is geared to a propeller which creates the
majority of the thrust. ’Jet’ helicopters work the same way, except that their engines
are connected to the main rotor shaft instead of a propeller.
Turboprops are more fuel efficient than turbojets at low altitudes, where the
thicker air gives a propeller a lot more ’traction.’ This makes them popular on planes
used for short flights, where the time spent at low altitudes represents a greater percentage of the overall flight time.
68
CHAPTER 5
Tc
Td
Tb
c
Q1
d
Q2
b
Ta
a
V1
V2
Figure 5.31: Otto cycle in a Temperature-versus-Volume graph. Note that between d and
a the hot gas is dumped into the atmosphere and replaced by fresh and cold gas. This is
modeled as a cooling of the gas at constant volume.
Figure 5.32: A turboprop.
69
CHAPTER 5
Figure 5.33: A turbofan
Turbofan turbine for aircrafts The turbofan is something like a compromise
between a pure turbojet and a turboprop. It works like the turbojet, except that the
turbine shaft also drives an external fan, usually located at the front of the engine.
The fan has more blades than a propeller and spins much faster. It also features a
shroud around its perimeter, which helps to capture and focus the air flowing through
it. These features enable the fan to generate some thrust at high altitudes, where a
propeller would be ineffective.
Much of the thrust still comes from the exhaust jet, but the addition of the
fan makes the engine more fuel efficient than a pure turbojet. Most modern jetliners
now feature turbofan engines. Both the turboprop and the turbofan follow a so-called
Joule cycle (see Fig. 5.34).
Air enters the compressor at atmospheric pressure and is compressed to
around 15 bar (step a-b). It is then mixed with fuel in the combustion chamber,
producing hot combustion gases (steps b-c) that do work on the turbine (steps c-d).
The exhaust gases are then vented to atmosphere (step d-a)
Assuming the change in the compressor is an adiabatic process ( = 0), the
first law of thermodynamics implies that the change in internal energy of the gas during
compression is
.
∆ =
(5.79)
.
is the work done by the compressor on the gas.
where
Also, from Eq. 5.76 we can equate the network done by the compressor to the
increase in enthalpy, i.e.
.
= − = ( − )
(5.80)
where is the specific heat at constant pressure. Similarly, assuming the
70
CHAPTER 5
b
c
a
a
b
c
d
d
c
b
d
a
Figure 5.34: Joule cycle: During this cycle heat is added to the compressed gas via the
combustion of fuel in the combustion chambers between (b) and (c). Heat is removed between
(d) and (a) by the atmosphere. Although it is an open cycle the atmosphere can be considered
as a huge heat exchanger that cools the air before it is entering the compressor.
71
CHAPTER 5
turbine is adiabatic, the work done by the turbine on the gas
= − = ( − )
(5.81)
1 = −
(5.82)
As this work is negative, which implies that in fact the gas has worked
on the turbine. The heat provided to the gas in the combustion chamber is
Defining the efficiency as
=
%
.
−
.
1
(5.83)
we obtain finally
( − ) − ( − )
(5.84)
( − )
This expression for the efficiency of a gas turbine is not really useful as the
values of the various temperatures in the engine are generally not known. A much
more useful expression would be in terms of the compression ratio . This ratio is
typically 15.
For this we need to know how pressure and temperature are related to each
other for an ideal gas under adiabatic compression. From Section 5.3.4 and the ideal
gas law we can write that
µ ¶
µ
¶
µ ¶
ln
= ln
= ln
(5.85)
and
µ ¶
µ
¶
µ ¶
ln
= ln
= ln
(5.86)
which implies that
=
µ
¶
)
¶( −1
µ
=
as = − . In Eq. 5.87 we have introduced
=
The efficiency of the gas turbine is then
72
(5.87)
(5.88)
CHAPTER 5
turbine
compressor
Figure 5.35: World’s largest and most efficient gas turbine (60%) with a capacity of 340
megawatts The SGT5-8000H gas turbine, newly developed by Siemens, is the world’s largest
and most efficient gas turbine (60%) with a capacity of 340 megawatts.
( − ) − ( − )
=1−
=
( − )
µ
¶ 1−
(5.89)
For a monatomic ideal gas = (52)(32) = 53. For a diatomic gas =
(72)(52) = 14. With a compression ratio = 15 we find that the maximum
efficiency of a gas turbine in air (air is a diatomic gas) is 54%. The temperature in the
combustion chamber is typically 1300 K and the exhaust gas temperature is ˜600 K.
Carnot’s equation for efficiency gives then also 54% (as it should !)
Gas turbines for electric generation Gas turbines for electricity generation originally evolved from jet turbine engines. In a jet engine, the thrust arises from the
combustion of gaseous fuel and the expansion of the exhaust gases that deliver most of
their energy to the turbine
5.5.4
Heat pumps
Instead of feeding heat into an engine to produce mechanical work, one can also operate
a Carnot engine backwards, i.e. feed mechanical work into it to move heat from a cold
73
CHAPTER 5
pa
a
T1
Q1
b
pd
d
Q2
c
T2
Va Vd
Vb
Vc
Figure 5.36: Heat pumps are used to heat houses. T 1 is the temperature of the house, which
is higehr than that of the outer world. The house plays thus the role of the warm heat bath
and the surrounding (garden, air, river,....) is the cold bath.
reservoir to a hot one. The efficiency of the reverse Carnot engine depends also only on
the temperatures of the two reservoir but note that the efficiency is defined differently
than for an “engine” that produces mechanical work. For the reverse Carnot cycle we
use mechanical work to extract heat from the cold reservoir in order to add it to the
hot reservoir. Such a device is called a heat pump. The efficiency of heat pump is
larger than 100 % as shown below. How is this possible ?
To answer this question we need to go back to the definition of efficiency. As
said earlier efficiency is defined as
(5.90)
For a heat pump “What you get” is the heating of your house and “What you
pay” is the mechanical work needed to operate the heat pump.
=
heat pump
and thus
74
%
= 1.
(5.91)
CHAPTER 5
pa
h.p.
a
Q
Q2 W 0
1
1
Q
W
h.p.
Q1
Q1 Q2
b
pd
1
Q2
1
Q1
Q1
Q2
T1
T2
d
c
h.p.
VaVd
Vb
Vc
1
1
T2
1
T1
Figure 5.37: This figure summarizes the various steps used to derive Eq.V.12
heat pump =
1
1
1 − 21
(5.92)
as 1 2 . The various steps of the derivation of Eq.5.92 are indicated in
Fig. 5.37. From Eq.5.92 we see that the efficiency of a heat pump is indeed higher than
100%. It is thus much more efficient to heat your house with a heat pump than with
electricity.
5.5.5
Heat pumps: evaporation-condensation cycle
In our discussion of the inverse Carnot cycle we showed that efficiencies higher than
100% can be achieved. Actual heat pumps operate with a coolant fluid that evaporates
at temperatures below 0 C.
Within the closed circuit of the heat pump, the refrigerant is responsible for
transferring and transporting the heat. The actual heat gain from the environment
takes place in the heat pump’s evaporator. This is where the liquid refrigerant comes
into play, which boils and evaporates even below 0oC, thus storing the energy extracted
form the environment. The volume of the refrigerant, now in gaseous form, is then
reduced in the compressor. During the compression of the refrigerant, the pressure
75
CHAPTER 5
Figure 5.38: A heat pump heating system consists of the heat source system, the heat pump
itself and a heat distribution and storage system. Note that the heat source (i.e. the environment) is at a lower temperature than inside the house.
Figure 5.39: Details of the evaporation-condensation cycle used in a heat pump.
76
CHAPTER 5
increases significantly, thus also increasing the temperature of the refrigerant. The
heated refrigerant then flows on to the liquefier - a heat exchanger in which the heat is
transferred to the heating system in the house. In this cooling process, the refrigerant
returns to liquid form at high pressure. After the expansion valve the refrigerant is still
liquid but now at a lower pressure and temperature: in this state it is again able to
absorb heat from the environment. The next cycle can again take place and so on.
5.6
REAL GASES
So far we have only considered ideal gases. With this simple model we were able
to describe engines such as internal combustion engines (Otto cycle)), place Stirling
engines, gas turbines, and heat pumps. In fact, heat pumps (and fridges) available on
the market do not operate according to a Carnot cycle. They explicitly use the fact
that gases can be liquefied and liquids can be vaporized. The same is true for steam
turbines. We need thus to consider situations where a substance, for example water,
exists in 2 different phases: gaseous and liquid. The simplest extension of the ideal gas
concept to include gaseous and liquid phases is given by the Van der Waals equation
of state. In Section 5.6.1 we give a plausibility argument for the form of the Van der
Waals equation of states.
5.6.1
Van der Waals gases
In an ideal gas there are per definition no forces between molecules (except of course the
transient forces during impacts with the container walls and during collisions between
molecules). In a real gas there are forces between molecules as long as they are not too
far apart. For simplicity we assume that the interaction force between two molecules is
the same as long as they are within a range R. Deep in the interior of the gas the total
force on a given molecule is zero as, in average, it is equally attracted in all directions.
However, a molecule at the surface of a gas feels an inwards force (see Fig. 5.40). The
total force acting on a molecule at the surface is proportional to the number of molecules
within the half-sphere of radius . This number is proportional to the density of the
gas where is the number of molecules in the volume .
The force f on a single surface molecule is proportional to the number of molecules
within the range R, i.e.
23
∝
(5.93)
33
where d is the average distance between molecules, and
µ ¶ 13
(5.94)
=
77
CHAPTER 5
R: Interaction
range
d: average
distance
between
molecules
Figure 5.40: A molecule at the surface of a gas is attracted inward by all the molecules within
a distance R. The forces are indicated by red arrows.
We have then
≈
23
3
∝
(5.95)
as the radius R is a characteristic interaction radius that is the same for all molecules.
The preceding reasoning needs to be extended to all the molecules that still feel the
surface. We call these molecules “subsurface molecules” (see Fig. 5.41).
The number of “subsurface” molecules is also proportional to , since
23
≈
∝
(5.96)
3
3
The total inward force on “subsurface” moleculesµ is thus
¶2
× ∝
(5.97)
This force acts on the area 2 . The corresponding additional pressure ( = )
is:
µ ¶2
×
4
∝ 6 ∝
(5.98)
=
2
This additional pressure should be taken into account in the equation of state of the gas.
In a first approximation one would then be tempted to write for n moles of non-ideal
gas that
78
CHAPTER 5
R: Interaction
range
D
Figure 5.41: A molecule within a distance D from the surface of a gas is also attracted inward
by all the molecules within a distance R. The forces are indicated by red arrows. There are
more arrows with an inward component than arrows with an outward component. This is
true as long as . As long as a molecule is at a distance shorter than the interaction
range it feels a net force directed inwards. This applies to all the molecules contained in
the green half-sphere. The number of these molecules is also proportional to
µ
³ ´2 ¶
+
=
(5.99)
We need, however, to take another ingredient into account. In an ideal gas molecules are
treated as point-like objects. In reality, a molecule has a finite size. As a consequence
the free volume available to molecules in a gas contained in a vessel of volume V is
smaller than V. Denoting by b the volume of n moles of molecules we conclude that
the free available volume is (V-nb) and write the Equation of States of a non-ideal gas
as
µ
³ ´2 ¶
+
( − ) =
(5.100)
where a and b depend on the gas under consideration. Typical values are given in the table below of the van der Waals Coefficients for typical gases (from http://en.wikipedia.org/wiki/Van
der Waals constants)
79
CHAPTER 5
120
F1
F3
F4
F2
F5
400 K
350 K
300 K
Pressure [105 Pa]
100
80
60
40
20
250 K
200 K
0
-20
-40
0.0
0.2
0.4
0.6
0.8
1.0
Volume [liter]
Figure 5.42: Pressure-volume isotherms for carbondioxide (CO2 ) calculated with the values
given in the table of Van der Waals coefficients by means of Eq. 5.100
Van der Waals Coefficients
Gas
(Pa m6 )
(m3 /mol)
Helium
3.46 x 10−3 23.71 x 10−6
Neon
2.14 x 10−2 17.10 x 10−6
Hydrogen
2.48 x 10−2 26.61 x 10−6
Carbon dioxide 3.64 x 10−1 42.69 x 10−6
Water vapour
5.54 x 10−1 30.49 x 10−6
The isotherms calculated by means of Eq.5.100 and the parameters a and b for carbondioxide (CO2 ) are shown in Fig. 5.42. At high temperatures the isotherm have
the typical hyperbolic shape of the isotherms of an ideal gas. Below a certain critical
temperature the isotherms exhibit an unphysical segment where the pressure increases
with increasing volume. This is physically impossible. Maxwell has shown that these
isotherms must be modified as indicated in Fig. 5.43a for CO2 and in Fig. 5.43b for
H2 O.
5.6.2
Heating of water at constant pressure
During the heating of water, there is a transformation of liquid into water vapour. At
the end there is only hot water vapour. With a thermometer you measure that the
temperature increases first gradually with increasing Q, the heat supplied to the water
(see left panel of Fig. 5.44). At a certain temperature (the boiling point of water)
80
CHAPTER 5
120
400 K
350 K
300 K
Pressure [105 Pa]
100
80
60
a)
40
20
250 K
200 K
0
-20
-40
0.0
0.2
0.4
0.6
0.8
1.0
Pressure [105 Pa]
Volume [liter]
240
220
200
180
160
140
120
100
80
60
40
20
0
-20
-40
0.0
673 K
b)
573 K
473 K
373 K
283 K
0.2
0.4
0.6
0.8
1.0
Volume [liter]
Figure 5.43: a) The Maxwell construction replaces the unphysical region of the Van der
Waals isotherms by a flat plateau along which gaseous CO2 coexists with liquid CO2 . The
blue “bubbly” area represents the region in the p-V diagram where liquid and gaseous CO2
coexist.
b) the same for water. The critical point is at a temperature of 647 K and at a pressure of
218 ×105 Pa.
81
CHAPTER 5
Q
T T
cp
Temperature [K]
Temperature [K]
T
S
cp
Entropy S [kJ/K/kg]
Heat Q [kJ/kg]
Figure 5.44: Left panel : Variation of the temperature during heating of water at constant
pressure. At the boiling point the temperature remains constant until all the water has been
converted to vapour. Instead of plotting the added heat Q one can also choose the entropy
(green curve). One obtains then the green curve in the right panel.
the temperature remains constant. The heat is used to break the molecular attraction
between water molecules in liquid water. After all the water has been vaporized, the
temperature increases again linearly with increasing Q. The amount of heat necessary
to transform all the water into vapour is called the latent heat. On the right of Fig.
5.44 we have replotted the measurements on the left in a temperature versus entropy
graph. The green curve is obtained from measurements at constant pressure. It is
called an isobar. In the plateau region there is coexistence of water and water vapour.
A whole collection of such isobars is given in Fig. 5.45.
5.6.3
Steam turbines
In a conventional thermal power plant cycle the working fluid is water and, at various
stages in the cycle, the working fluid changes phase from water, to a two-phase mixture
of water and steam, to dry steam and finally back to water. Some knowledge of the
thermal properties of water and steam is essential in order to understand the operation
82
CHAPTER 5
1000 200 100 10
800
1 bar
o
T e m p e ratu re
[ C]
700
600
500
400
300
200
100
0
0
1
2
3
4
5
6
7
8
9
10
Entropy S [kJ/kg/K]
Figure 5.45: left panel: Selected isotherms of water up to high temperatures and pressures.
Right panel: copy of the corresponding schematic figure of the book.
of such a plant. The most convenient thermodynamic variables for describing thermal
power plants are temperature T and entropy S. The T -S diagram for water and steam
is shown in Fig. 5.45.
There are three distinct regions of interest:
• Region I: water
• Region II: two-phase mixture of water and steam
• Region III: dry steam.
The bell-shaped curve represents the phase boundary. The solid lines are isobars (constant pressure) and the dashed lines in region II are lines of constant steam quality x,
i.e. the fraction by mass of steam in the two-phase mixture.
To illustrate how to interpret the T -S diagram, consider the process of boiling water
in a kettle. Since the fluid remains at atmospheric pressure throughout the heating
process, we follow the isobar ABCD (at a pressure of 1 bar). Along AB water is heated
from cold to the boiling point of 100◦ C. Water starts to boil at point B but the temperature remains at 100◦ C along BC as the fluid absorbs the latent heat of evaporation.
At point C all the water has converted to dry steam. (This is an idealization of what
happens in practice, since some water droplets may still exist for a while beyond point
C.) The line CD represents superheated fluid (i.e. the temperature of the steam is above
the boiling point), and the temperature of the dry steam rises at constant pressure as
more heat is supplied.
83
CHAPTER 5
Figure 5.46: (top) Coal-fired steam turbine power plant installed by Siemens in CityplaceShanghai, with a capacity of 2 × 900 MW. Thanks to advanced power plant technology based
on high steam temperatures and pressures, the CO2 emissions are reduced by 2.1 million tons
a year. (right) SST-800 industrial steam turbine with a capacity up to 150 MW.
c
Wturbine
b
d
a
Qout
Wpump
Qin
f
Qin
c
e
a
b
Wturbine
f
Wpump
e
Qout
d
Figure 5.47: Physical layout of the four main devices used in the Rankine cycle
http://en.wikipedia.org/wiki/Rankine_cycle
84
CHAPTER 5
The Rankine cycle used in steam turbines involves four main devices, each changing
the state of the working fluid. These states are identified by letters in Fig. 5.47.
Process a-b: The high pressure liquid enters a boiler where it is heated at constant
pressure by an external heat source to become a vapor.
Process c-d: The vapor expands through a turbine, generating power. This decreases
the temperature and pressure of the vapor.
Process d-e: The wet vapor then enters a condenser where it is cooled at a constant
pressure and temperature to become a liquid. The pressure and temperature of the
condenser is fixed by the temperature of the cooling coils as the fluid is undergoing a
phase-change.
Process e-f: The working fluid is pumped from low to high pressure. As the fluid is
a liquid at this stage, the pump requires little input energy.
In an ideal Rankine cycle the pump and turbine would be isentropic (this means conserving entropy, which is equivalent with saying that the process is adiabatic), i.e., the
pump and turbine would generate no entropy and hence maximize the net work output.
Processes c-d and e-f would be represented by vertical lines on the − diagram and
more closely resemble that of the Carnot cycle. The Rankine cycle shown here prevents
the vapor ending up in the superheat region after the expansion in the turbine, which
reduces the energy removed by the condensers. In the book you can read why it is
necessary to operate a steam turbine in a Rankine cycle rather than a Carnot cycle.
5.7
CO2 sequestration
CO2 sequestration is another example of the necessity to have good equations of state
for gas-liquid systems.
Even if the supply of oil were infinite, there would still remain a serious CO2 problem.
One would then need to sequestrate CO2 near oil or coal fired power plants to avoid
dumping ever increasing amounts of this greenhouse gas into the atmosphere. Sequestration is the CO2 injection in the subsurface of the Earth. This cartoon sketches the
process of injecting of CO2 in the subsurface. The CO2 will come from concentrated
sources, such as power plants, because capturing CO2 from mobile sources such as cars
or planes is not practical. The CO2 must be injected deeper than 1 km. At that depth
the pressure is so large that CO2 is a liquid rather than a gas. We must store CO2 in
liquid form, otherwise there is not enough storage space to store CO2 for, say, the next
century.
To influence the climate positively one would need to sequester typically 3 Gigaton of
CO2 /year. This is about 1/8th of the current CO2 emissions. This means that CO2
sequestration is a massive operation if it is to make a difference.
85
CHAPTER 5
1 km
2 km
Figure 5.48: Artists impression of a CO2 sequestration facility.
5.8
5.8.1
Fuel cells: Engines not subject to Carnot cycle
limitations
Principle of operation of a fuel cell
The fuel cell was invented in 1839 by William Grove but interest in it disappeared
rapidly as cheap fossil fuels became available. It is a device in which, for example,
hydrogen and oxygen are constantly fed to produce electricity. The overall chemical
reaction taking place is
1
(5.101)
H2 + O2 → H2 O
2
This reaction is strongly exothermic, i.e. it produces a large amount of heat.
This heat is directly related to the enthalpy change during the reaction that takes place
at constant pressure.
This follows directly from the First Law that says that
= −
thus
86
(5.102)
CHAPTER 5
The critical point is 7.38 MPa
at 31.1 °C.[5]
Pressure [105 Pa]
80
303 K
298 K
293 K
283 K
273 K
60
40
0.0
0.2
0.4
0.6
Volume [liter]
Figure 5.49: Van der Waals isotherms for CO2 . The critical point is 7.38 MPa at 31.1 C.
The isotherms shown are relevant for CO2 sequestration
+ =
(5.103)
+ = ( + ) =
(5.104)
but, at constant pressure
The measured value for the enthalpy change is
¶
µ
1
HO + HH2 = −2858 kJmole = ∆H
HH2 O −
2 2
(5.105)
This means that 285.8 kJ heat is produced during the formation of one mole
of water, i.e 18 g of water, or equivalently 18 cm3 of water. Per kg of hydrogen this
corresponds to a heat of ~142 MJ, approximately 3 times more than gasoline !
The efficiency of a fuel cell is defined as the output of electrical energy divided
by the input of chemical energy. The input of chemical energy is just the heat of the
reaction (see Eq.5.101), which is equal to the change of enthalpy. For the electrical
output, we need to go back to the notion of thermodynamic potentials presented in
Section 5.4.2.
87
CHAPTER 5
Figure 5.50: Fuel cell. Hydrogen enters the fuel cell on the left and in contact with a catalyst
is separated in electrons and protons. The PEM membrane has the very special property to
conduct protons but no electrons. The electrons are thus forced to flow externally towards
the cathode where they are needed to recombine with the protons and ultimately to form
water molecules. The theoretical efficiency of a fuel cell is much higher than that of a Carnot
cycle as the step producing heat from chemical energy is bypassed. Note that there are no
mechanically moving parts.
Figure 5.51: One of the 3 hydrogen busses in Amsterdam. They are powered by fuel cells
produced by the Canadian Ballard Company.
88
CHAPTER 5
5.8.2
Useful thermodynamic potentials
In preceding sections, we have discussed a simple gas as a thermodynamic system. Its
state could be defined by three variables p, V and T, of which two are independent.
We have introduced a state function as a function that is entirely determined by the
variables of the state of the system. So far we have noted three examples, the internal
energy U, the entropy S and the enthalpy H . They turned out to be very useful to
describe physical processes. There is one more function that it is essential to know:
the Gibbs free energy G. Furthermore, we want to include other types of work than the
mechanical compression work —pdV considered until now.
We start with the First Law of Thermodynamics and write
= . − + .
(5.106)
− . + = .
(5.107)
− + = .
(5.108)
= − +
(5.109)
where . is the non compression/mechanical work performed on the system.
An example of non mechanical work is for example electrical work. This relation can
be re-written as
.
and, noting that in a reversible process
= also as
Let us now define the Gibbs free energy in the form
This is obviously a thermodynamic potential as all the quantities depend
only on the state of the system. Now comes the trick! At constant temperature and
constant pressure
and thus
− + = ( − + ) =
(5.110)
= .
(5.111)
This shows that the non-mechanical work performed on the system is simply
equal to the increase in its Gibbs free energy. This is why G plays an important role
in thermodynamics. Note, of course that the non-mechanical work performed by the
system is
% = −
89
(5.112)
CHAPTER 5
5.8.3
Theoretical efficiency of a fuel cell
We are now in a position to calculate the efficiency of a fuel cell. The non-mechanical
work, which for a fuel cell is electric work, is given by the change in Gibbs free energy.
Experimentally, one has determined that during the reaction
1
H2 + O2 → H2 O
2
the Gibbs free energy decreases by
¶
µ
1
GO + GH2 = −2371 kJmole = ∆G
GH2 O −
2 2
(5.113)
(5.114)
The efficiency is defined as the ratio of the electrical work produced by the
fuel cell divided by the heat that the direct combustion of hydrogen and oxygen would
produce: this is the same input as the heat .
1 in a Carnot cycle. We have thus
Electrical work
−∆
=
Heat input
−∆
From the experimental values given above, we find finally
=
(5.115)
−∆
2371
=
= 083
(5.116)
−∆
2858
In other words, the theoretical efficiency of a fuel cell is 83%. Note that for a
Carnot engine operating between 600 K and 1300 K (as for example in a gas turbine),
the theoretical efficiency is only
=
=1−
5.8.4
600
= 054
1300
(5.117)
Efficiency of real fuel cells.
The actual efficiency of various engines is indicated in Fig. 5.52. It turns out that
for powers up to 10 MW fuel cells are the most efficient. Also remarkable is that
their efficiency depends only weakly on their size. This is why there is nowadays great
interest in fuel cells for all sort of applications, including cars. In Amsterdam there are
presently 3 busses operated by the GVB that use hydrogen to power fuel cells.
90
CHAPTER 5
100
Gas &
Steam
turbines
Efficiency [%]
80
60
40
Fuel cells
Stirling
Diesel
20
Otto
0
1E-3
0.01
0.1
1
10
100
Power [MW]
Figure 5.52: Efficiency of various engines as a function of the nominal engine output power.
91
Chapter 6
Introduction to fluiddynamics for
energy
6.1
INTRODUCTION
After introducing the basic concepts of fluid dynamics, in a first part we use essentially
no more than Newton’s mechanics to derive useful relations for the efficiency of wind
turbines and aircraft. In a second part we develop the basic concepts of fluid mechanics
to understand what makes wind turbines turn in the wind.
6.2
BASIC FLUID DYNAMICS
In this section we discuss some basic concepts of fluid dynamics. Fluid dynamics
is about the motion of fluids, that is liquids and gases. In energy conversion, fluid
dynamics is import for power extraction from rivers, tides, waves and the wind. It is
of secondary importance in many other energy conversion processes, where liquids or
gases flow trough pipes, turbines etc.
6.2.1
Stationary fluids
In any fluid we can define a scalar pressure . The force on any surface with area in
the fluid is perpendicular to that surface and equal to = , conversely
(6.1)
If we consider a cylinder of fluid, submerged in the same fluid, as shown in
Fig. 6.1, then this piece should not move, since it is equivalent to all other pieces of
=
92
CHAPTER 6
Figure 6.1: Force equilium on a cylinder of fluid, submerged in the same fluid.
fluid and we cannot have a spontaneous continuous motion of fluid (or else we would
have a perpetuum mobile). Hence, from this force equilibrium,
= 2 ∆ − 1 ∆ − ∆ = 0
2 − 1 =
∆
∆
(2 − 1 ) ∆
=
=
= (2 − 1 )
∆
∆
∆
(6.2)
(6.3)
Which implies that the pressure in a fluid changes with depth as
2 − 1 = (2 − 1 )
(6.4)
∆ = ∆
(6.5)
or
Incompressible fluids
If 6= (r) (i.e. the fluid in incompressible, which most fluids approximately are) then
pressure increases linearly with depth. For water the pressure increases 1 bar for each
10 m of depth.
Using this effect, one can make a pressure measuring device, or barometer, as
shown in Fig. 6.2.
93
CHAPTER 6
Figure 6.2: Principle of a barometer. The ambient pressure is related to the height as =
The top of the tube is connected to a vacuum pump and hence there the
pressure is = 0. Hence the pressure at the surface of the liquid in the container on
the left is
=
(6.6)
Knowing the density of the liquid and measuring the height , allows one
to determine the pressure using eq. 6.6. If the liquid is mercury, at atmospheric
pressure the height is approximately 760 mm. By definition, 1 atm = 760 mmHg. Note
that 1 bar = 105 Pa ' 1 atm.
Compressible fluids: barometric pressure
If, by contrast to what we assumed above the fluid is compressible, we have from eq.
6.5
= ()
(6.7)
A relevant example is the pressure in the atmosphere, where the ’barometric’
pressure must be obtained from integration:
Z
Z ∞
= =
()
(6.8)
0
To find (), we use for the air in the atmosphere the ideal gas law
=
94
(6.9)
CHAPTER 6
where = number of moles in
from which we find
=
(6.10)
defining = mass of a mole of air and multiplying both sides of eq. 6.10 by
, we have
=
=
(6.11)
where last equal sign follows because is the total mass within the volume
.
Substitution of the left hand side of eq. 6.11 in eq. 6.7 yields
(6.12)
where we introduced a minus sign since pressure increases downwards in the
atmosphere, while we want to measure the height upwards as positive. We may now
integrate eq. 6.12 by parts:
= −
= −
(6.13)
to obtain
ln = −
+
(6.14)
or
−
= 0 − = 0
with
0 =
0
(6.15)
(6.16)
Clearly for = 0 we have = 0 and hence 0 is the pressure at the surface
of earth, 0 = 1 atm. By substituting the values for the various constants, we find
¢¡
¢
¡
83 J K−1 270 K1
0 =
= 8166 9 m
(6.17)
(98 m s−2 ) (28 × 10−3 kg)
which implies that at 5400 m the pressure is already down to 0.51 atm see
Fig. 6.3.
95
CHAPTER 6
Figure 6.3: The pressure at the Thorong-La pass in Nepal is only 0.51 atm Still after proper
accimatisation, humans and animals are able to cope.
6.2.2
Fluids in motion
We now turn our attention to the more relevant case for energy conversion: fluids which
are in motion.
Equation of Bernoulli
To derive an extremely useful equation for fluid flow, consider streamlines in the fluid.
These are the trajectories that particles with the same density as the fluid (or parts of
the fluid itself!) would follow due to the motion of the fluid. In the Fig. 6.4 these are
indicated by dashed lines.
Also indicated in Fig Fig. 6.4 is what happens as the fluid moves trough the
right with the fluid between the two blue lines. Initially there is a part of the fluid
bounded by the blue lines and 1 and 2 . A time ∆ later, the fluid has move to the
right. At the left side over a distance ∆1 and at the right side over ∆2 which are
unequal because the width between the blue lines is changing. The mass that moved
on the left hand side
∆1 = 1 ∆1
(6.18)
should be equal to the mass that moved on the right hand side,
∆2 = 2 ∆2
96
(6.19)
CHAPTER 6
Figure 6.4: A fluid in motion. The dashed lines are streamlines. A particle in the fluid with
the same density as the fluid would follow a streamline.
because mass is conserved:
∆1 = ∆2
(6.20)
∆1 = 1 ∆1 = 1 1 ∆1 = 1 1 1 ∆
(6.21)
Since
and analogously for the right hand side, we find that
1 1 1 ∆ = 2 2 2 ∆
(6.22)
This holds for arbitrary positions 1 and 2 and hence
= const
(6.23)
This equation is called the "continuity equation".
For an incompressible fluid, that is a fluid with = const we find from eq.
6.23 that
= const
(6.24)
which implies that the fluid flow faster trough small tubes and slower through larger
ones.
To proceed, we consider the work done by displacing the fluid in the manner
we just discussed. Since the work
= ∆ = ∆
(6.25)
and the pressure in the fluid gives an inwards pointing force on the moving piece of
fluid, that is a force to the right at position 1 and a force to the left at position 2, we
find
97
CHAPTER 6
∆ = 1 1 ∆1 − 2 2 ∆2
(6.26)
∆ = 1 1 1 ∆ − 2 2 2 ∆
(6.27)
or
On the other hand, due to energy conservation, the work done on this piece
of fluid must equal the change in total energy of this piece of fluid:
∆ = ∆ + ∆
(6.28)
where the potential energy is just due to gravity. Hence we have
1
1
∆ = ∆ 22 + ∆ 2 − ∆ 12 − ∆ 1
2
2
(6.29)
∆ = 1 1 1 ∆
(6.30)
with
which can be written as
1 1 ∆ =
∆
1
(6.31)
Substituting the last expression and its equivalent at position 2 in eq. 6.27 gives
∆ = 1
∆
∆
− 2
1
2
(6.32)
and combination with eq. 6.29 gives
1 2
1
1
−
= 22 + 2 − 12 − 1
1 2
2
2
(6.33)
where we divided the left and right hand sides by ∆. Rearranging gives
1 1 2
2 1 2
+ 1 + 1 =
+ + 2
1 2
2 2 2
(6.34)
which should hold for all positions 1 and 2 and hence we have finally
1 2
+ + = const
2
which is the "Bernoulli equation".
98
(6.35)
CHAPTER 6
Figure 6.5: The flowlines around the wing of an airplane. The longer flowlines above the
plane imply a larger velocity of the air.
It is illustrative to look briefly back at the static case: if the fluid is not
moving, = 0 and we find that
+ = const
(6.36)
which is equivalent to 6.5.
We now look at consequences of the Bernoulli equation on moving fluids. In
the case of a horizontal flow, for example across the wing of an airplane, see Fig. 6.5,
both gravitational term are equal and hence cancel, leading to
1 1 2 2 1 2
+ =
+
1 2 1 2 2 2
(6.37)
which implies for 1 2 that 1 2 Since the path of flowlines is longer above the
wing, there the velocity must be larger (to have continuous flow) and hence the pressure
above the wing is lower, leading to ’lift’.
Flow meters
Using the same principles as above, we can easily design instruments for the measurement of fluid velocity. First consider an incompressible fluid flowing trough a tube, see
Fig. 6.6.
For this geometry, again the gravity terms cancel, leading to eq. 6.37. Using
the incompressibility property we thus find
¢
1 ¡
1 − 2 = 22 − 12
2
99
(6.38)
CHAPTER 6
Figure 6.6: A Venturi. The pressure gauge measures the pressure difference in the fluid
between the constriction and a wider part of the tube.
and with eq. 6.24 we have
1
1 − 2 =
2
õ
1
1
2
¶2
− 12
!
(6.39)
For a known geometry and known fluid density measurement of ∆ thus
yields the fluid velocity 1 trough the pipe, from which also the mass transport ∆̇ =
1 1 can be easily calculated.
There is another geometry which can be used to find a fluid’s velocity. See
Fig. 6.7: one pressure gauge is in a static part of the fluid (air), while the other is
mounted such that the fluid (air) blows into a tube connected to the gauge. For the
latter gauge (top part of the figure) we compare points A (or position 1) and B (position
2). From Bernoulli with cancelled gravity terms, we find
1 1 2 2
+ 1 =
2
(6.40)
because 2 = 0. Hence
1 =
s
2 (2 − 1 )
(6.41)
By measuring the pressure difference 2 − 1 we find the velocity 1 of a fluid with
known density A technical realization for airplanes is shown in Fig. 6.8.
100
CHAPTER 6
v v1
p P1
v0
p P2
p P1
Figure 6.7: Two tubes used together of the mesaurement of the velocity of a gas.
p1
p2
Figure 6.8: The Pitot tube geometry for an airplane.
101
CHAPTER 6
Figure 6.9: Laminar flow of a fluid above a static plate (bottom). Flowlines are indicated
dashed, velocity vectors are blue.
Viscosity and fluid flow trough tubes
In general, a fluid has internal friction which is called viscosity. Honey has a larger
viscosity than water. This leads to a velocity that is position-dependent. For small
flow velocities the velocity is only position- and not time-dependent. This is the case
of laminar flow, shown in Fig. 6.9.
In this case (of course) the bottom layer is static, while the layer above it has
a certain velocity. Since each slice of fluid (such as that between the two red lines) is
equivalent, the velocity must increase linearly upwards, i.e.
= const. This gradient
is related to the horizontal force on each red plane of area by
=
(6.42)
is the shear stress on the fluid. The dimension
where is the dynamic viscosity and
of is clearly [ N m−2 s].
Velocity profile in a tube
Now we consider a tube, see Fig.
102
CHAPTER 6
Figure 6.10: A tube with fluid flowing from left to right.
Within this tube, we consider the surface of tube within the fluid with radius
, indicated in blue in the figure. The fluid is flowing from the left to the right under
influence of a pressure difference as indicated in the figure. The net force due to the
pressure is
= 2 ∆
(6.43)
while the surface area of the ‘blue’ tube experiences a shear force. This area is
= 2∆
(6.44)
and dividing the last two expressions yields
=
= −
(6.45)
2
where the last equal sign holds due to eq. 6.42. The right hand equation can be
integrated yielding
Z
¢
1 ¡ 2
=
=
− 2
−
(6.46)
2
4
Or: the velocity profile in the tube is parabolic, see Fig. 6.11.
To calculate the mass transport through a tube, consider an annular tube as
indicated in blue in Fig.
6.12.
Entering through this annular tube is a volume of liquid given by:
2 ∆ ∆
103
(6.47)
CHAPTER 6
Figure 6.11: The parabolic velocity profile in a tube.
Figure 6.12: Within the tube we consider an annular tube of fluid (blue),
104
CHAPTER 6
Figure 6.13: Streamlines for a turbulent flow. Note that these are not static, but cahnge as
a function of time.
or the flowrate is 2 ∆ The total flow through the whole tube is thus given by
Z
Z
¢
1 ¡ 2
4
=
− 2 =
(6.48)
2 =
2
4
8
0
0
where we used eq. 6.46 to substitute for (). Finally, we have for the mass
transport through a tube
4 2 − 1
=
8
which is called "Poiseuille’s Law".
(6.49)
Turbulence
For larger flow velocities the laminar flow of Fig. 6.9 breaks down and an erratic,
time-dependent flow occurs, shown schematically in Fig. 6.13.
The occurrence of turbulence is governed by the ratio of inertial forces (due
to the mass density of the fluid) and shear forces (due to the viscosity). An important
parameter is the Rayleigh number Re defined as
inertial force
viscous force
for small Re the flow is laminar, for large Re, the flow is turbulent.
Re =
105
(6.50)
CHAPTER 6
F lift
F drag
Figure 6.14: Lift is the force perpendicular to the fluid stream direction on an object in a
flow of fluid, while drag is the force along the direction of flow.
6.2.3
Lift and drag
Consider an object that is placed in a fluid flow, see Fig. 6.14. In general, there will be
a force on such an object due to the motion of the fluid. This force can be decomposed
in two components: "lift" is the force perpendicular to the fluid stream direction, while
"drag" is the force along the direction of flow.
From dimensional analysis we find that = 12 with [ −2 ] =
[−3 ] [ −1 ] [2 ] hence
= 1 = 2 = 1 and thus
1
= 2
2
and analogously
(6.51)
1
(6.52)
= 2
2
The coefficients are dimensionless and depend on the shape of the
object and orientation with respect to the flow.
106
Chapter 7
Water energy: rivers, reservoirs and
tides
7.1
FLUID DYNAMICS FOR WATER POWER
APPLICATIONS
We apply our fluid dynamics knowledge for hydropower applications. Since most of
such applications use turbines, we start with a discussion of turbine design.
7.1.1
Euler’s turbine equation
We now calculate the power output of a turbine, a machine that extracts rotational
mechanical energy (the turning of the turbine) from a linear flow of fluid. Note that
also a wind mill is a kind of turbine!
The torque generated by a turbine =
that is driven by a fluid flow can
be found from the angular momentum using = = 2 = , where is the
tangential velocity of fluid entering (1 ) of leaving (2 ) the turbine, as =
=
(1 1 − 2 2 ). Here we have used that
=
where
is
the
mass
density
and
the volume flow of the fluid. The contributions 1 and 2 2 correspond to the
torque generated by the fluid that enters (at a point with radius 1 ) and that leaves (at
2 ) the turbine, respectively. Since the rotational power is given by = we find
finally
= (1 1 − 2 2 )
(7.1)
which is called ’Euler’s Turbine equation’. Clearly it is advantageous to have
1 and 2 in opposite directions, as is often indeed realized, see Fig. 7.1.
Power output
Efficiencies = Power
09 are often possible!
in fluid flow
107
CHAPTER 7
rotating
2
1
in
out
static
Figure 7.1: A simple turbine. Fluid enters at the centre and leaves at the periphery. The
central part is static, the part outside the dashed circle can rotate. Note the change of sign
of tangential flow direction between entry and exit.
7.1.2
Hydropower from a dam
Enormous amounts of energy can be stored as gravitational energy of water in reservoirs.
A schematic is shown in Fig. 7.2.
The potential energy of the water at the surface of the lake with respect to the
level of the generator, which is a vertical distance (called the ’head’) below the lake
surface, is ∆ = From this we see immediately that the power of the generator
is given by
∆
=
=
=
(7.2)
where is the volume flow rate (expressed in m3 s−1 ) and the mass density
of the water.
Depending on the water flow velocity, different types of turbines are used, see
Fig. 7.3. If the water velocity is very high (due to a large head) and the flow rate
small, the Pelton wheel can be used, which reverts the direction of motion of the water
and hence obtains an impulse equal to 2∆. On the other hand, if there is a large
flow of water a small velocity, there is not much chance of completely reverting to flow
direction and a Kaplan turbine is used.
Among the advantages of hydropower are: low operating costs, low atmospheric
impact (if the initial rotting of vegetation in a newly formed reservoir is ignored), fast
reaction on sudden demand and long plant life. The disadvantages are: high investment
needed, large area needed, slow return on investment, accidents with dams are really
108
CHAPTER 7
Figure 7.2: Schematic of a reservoir with dam and generator. The head of water above the
generator is .
Figure 7.3: Optimal turbine types as a function of head and volume flow ≡ .
109
CHAPTER 7
Figure 7.4: Geometry of Earth and moon. The tides are indicated, largely exaggerated, in
blue.
catastrophic (this is the other side of the coin of the capability to store large amounts
of energy) and expensive decommissioning. As a result of the net positive economics,
such hydroelectric schemes have been mostly carried out where possible. The installed
capacity in 2005 was for the World 700 GW (USA 80 GW, China 65 GW, Norway 28
GW).
7.1.3
Tidal power
Apart from rivers, an important source for water motion is the tides. Tides are changes
in water level due to the gravitational effects of the moon and the sun.
Tides
For a brief discussion of the tides we use Fig. 7.4. For simplicity of argument we first
discuss how the earth rotates around the sun, and "moon" in the figure can be read
as "sun". At the center of gravity of earth, the gravitational and centrifugal force are
in equilibrium. Since ∼ 12 and ∼ this equilibrium does not at any other
position. Closer to the sun, the gravitational force wins, leading to an extra attraction
(and bump) of the surface of the oceans towards the sun. At the farthest point from
the sun, the centrifugal force wins, leading to a bump in the oceans away from the sun.
Hence there is simultaneously a bump at two sides of earth. Due to the rotation of
earth in 24h, the leads roughly to high tide every 12h. The argument above also holds
for the rotation of earth around the center of mass of the earth-moon system. It turns
out that the tides created by the moon are larger than those by the sun.
We now proceed to estimate the height of the tides. The important point is
that the surface of a liquid (water) adjusts itself such that there is no force along the
110
CHAPTER 7
surface (otherwise the water would flow in the direction of the force). Hence the water
surface is an equipotential surface. The gravitational force is given by
=
2
(7.3)
and hence the gravitational potential by
(7.4)
We now need to find at any position of the earth’s surface. From Fig. 7.4.
we obtain using the cosine rule
= −
1
1
1
= q
=√
¡
¢
2
2 + 2 − 2 cos
1 + 2 − 2 cos
(7.5)
using the Taylor expansion
1
3
1
√
= 1 − + 2
2
8
1+
(7.6)
this can be written as
1
1
=
Ã
1
1−
2
µ
¶
µ
¶2 !
2
3 2
− 2 cos +
− 2 cos
2
8 2
and ignoring terms that or of order
3
3
(7.7)
or higher
µ
µ
µ
¶
¶¸
´2 ¶ 1 ∙
1
1
1
1 2
3³
2 3
2
=
− 2 cos +
=
1−
2 cos
1 + cos + 2
cos −
2 2
8
2
2
(7.8)
Substitution of Eq 7.8 in Eq. 7.4 yields
µ
∙
¶¸
1
2 3
2
1 + cos + 2
cos −
(7.9)
= −
2
2
The centrifugal force is
= 2
(7.10)
and hence the centrifugal potential is
1
= − 2 2
2
111
(7.11)
CHAPTER 7
For the geometry of Fig. 7.4 we thus find with = and using again the cosine rule:
¢
1 ¡
= − 2 2 + 2 − 2 cos
2
or
¢
1 ¡
= − 2 2 − 2 cos + 2 = − 2 2
2
At the COM
= = 2 =
µ
1
2
− cos + 2
2
2
2
(7.12)
¶
(7.13)
(7.14)
and thus
2 2 =
(7.15)
substitution of eq 7.15 in 7.13 yields
=−
µ
1
2
− cos + 2
2
2
¶
(7.16)
The total potential is due to the sum of the gravitational and centrifugal forces, that
is the sum of eq 7.16 and 7.9:
¸
∙
3
2
2
= −
(7.17)
1 + 2 cos
2
The constant term does not contribute to any force and should be omitted.
Since the surface of a liquid (i.e. the surface of the oceans) is an equipotential
surface (see discussion above), we must have that at the surface of the oceans
∙
¸
3 2
2
= −
cos =
(7.18)
2 2
where is of course equal to the gravitational potential, which can also be expressed
as (since the potential energy is ) hence
3 2
cos2 = ()
2
2
(7.19)
3 2
cos2
2 2
(7.20)
hence
() =
112
CHAPTER 7
and using that
=
2
(7.21)
we find
3 4
cos2
() =
2
2
(7.22)
the tidal difference is thus:
34
' 054 m
(7.23)
23
where we used the numerical values for the earth-moon system. For the earth-sun
system, the effect is about 22× smaller. Although the mass of the sun is larger, the
gradient of the gravitational force due to the sun is smaller than that due to the moon.
That is because the moon is much closer to the earth. The gradient determines the
strength of the mismatch between and at the points B and D in Fig. 7.4. To
continue the discussion of tidal power we must now consider the flow of water in the
oceans due to the tides.
max =
Shallow water equation
The tides move very slowly (one period is about 12h) and hence have a very long
wavelength. For water waves with wavelength larger than the depth of the water, the
shallow water equation applies. Note that this implies that the shallow water equation
may apply in the deepest oceans!
The geometry for these waves is shown in Fig. 7.5. The pressure in the water
at vertical coordinate follows from the depth under the surface of the water ( − )
by
() = 0 + ( − )
(7.24)
where 0 is the pressure in the atmosphere above the water. From eq. 7.24 we have
=
(7.25)
Now consider the horizontal acceleration of the ’piece’ of water between and
+ . If the horizontal velocity is then the acceleration is
¢
¡
− +
1
==
=
=−
(7.26)
with eq. 7.25 this implies
113
CHAPTER 7
p0
p
p
∂p
∂x
dx
Figure 7.5: Geometry for deriving the shallow water equation. is pressure and and are
vertical and horizontal velocities.
= −
(7.27)
To continue, we need another ingredient: since water is (practically) incompressible, if there is a different horizontal flux at and + , then the height of the
water must change. To work with volumes, we use a thickness of the water perpendicular to the plane of Fig. 7.5. This is of course constant. So we have that the total
outflux from this ’piece’ of water must be zero:
− + ( + ) ( + ) + = 0
(7.28)
− + ( + ) ( + ) + = 0
(7.29)
=
=
=
(7.30)
µ
¶µ
¶
− + +
+
+
= 0
(7.31)
or
substituting
in eq. 7.29 yields
and after simplification and ignoring terms of order ()2
114
CHAPTER 7
+
+
= 0
(7.32)
or
+
+
=0
(7.33)
Because ln is small (the waves are much smaller than the water depth), while
fluctuates round zero
(7.34)
hence
(7.35)
and thus the first term in eq. 7.33 can be neglected with respect to the second. So
from eq. 7.33 we have
+
=0
(7.36)
or
1
'−
(7.37)
0
To obtain from this a wave equation we take
to find
2
1
=−
2
0
substitution of eq 7.27 finally gives
2
2
=
1 2
0 2
(7.38)
(7.39)
which is the wave equation for shallow water waves. The velocity of the shallow water
waves thus is
=
p
0
For an ocean of 2000 m depth we obtain
p
√
0 = 98 m s−2 × 2000 m = 140 m s−1 = 500 km h
(7.40)
(7.41)
which is a remarkable velocity, but a velocity that is indeed observed. In Fig we show
the arrival time of the 26 December 2004 tsunami expressed in hours after the moment
of the earthquake.
115
CHAPTER 7
Figure 7.6: Arrival time of the 26 December 2004 tsunami expressed in hours after the moment
of the earthquake.
The distance from the centre of origin to Africa is about 6000 km, and the
tsunami used 8 h to traverse that distance, thus it had a velocity of about 750 km/h,
roughly in agreement with the calculation above (eq. 7.41).
What we just calculated has important consequences for the tides. For instance, the tides at the equator should move roughly with the velocity of rotation of
earth at the equator, which is
2 × 6371 × 106 m
= 463 m s−1 = 1666 8 km h
24 × 3600 s
(7.42)
about four times faster than the water wave can move according to eq. 7.41. As a
consequence, the wave velocity cannot keep up with the tidal forces and a lag arises.
On the other hand, the fact that the wave velocity is determined by eq. 7.40, implies
that resonances might occur. The distance between Europe and America in the Atlantic
ocean is 4000 km and its average depth is 4000 m. From eq. 7.40 we find
=
p
√
0 = 98 m s−2 × 4000 m = 200 m s−1 = 720 km h
(7.43)
and thus the time the wave needs for one period is
→ → =
2 × 4000 km
= 11 1 h
720 km h
(7.44)
which is very close to the drive frequency of 11.5 h. Hence a tidal resonance occurs
that increases the height of the tides somewhat above that calculated above (eq. 7.23).
More spectacular increases in tidal height are found in the Bay of Fundy in Nova Scotia
and in the Channel and in the Severn Bay in England. In all these cases tidal resonance
116
CHAPTER 7
Figure 7.7: Schematic and photograph of the La Rance barrage tidal power station.
and the funnel shape of the water plays a role. Due to the funnel shape, the tidal wave
becomes higher and higher as it approaches the narrow part of the funnel. In the Severn,
the height difference is up to 10m, in the Bay of Fundy it may be 15 m. Clearly such
height differences can be used in a similar way as with reservoirs to generate power.
The earliest large scale station is that of La Rance in Brittany, France with a capacity
of 250 MW, see Fig. 7.7. Power is generated both at the influx and outflux parts of
the cycle.
We can calculate the power that can be generated from La Rance as follows.
The mass difference between high and low tide of the water in the reservoir is
=
(7.45)
and the potential energy stored is thus
1
=
2
(7.46)
(the COM is at 12 ). Substitution of eq 7.45 in eq 7.46 gives the total work that the
station can deliver in one cycle of length :
1
= 2
2
(7.47)
and the power is thus
=
2
=
2
117
(7.48)
CHAPTER 7
substitution of the numbers for La Rance yields
98 m s−2 × 103 kg m−3 × 45 km2 × (7 m)2
= 250 MW
(7.49)
2 × 12 × 3600 s
in agreement with the rating of La Rance.
Several installations are build and under construction in S-Korea, while there
is a potential of 8.6 GW for the Severn and 87 GW for Penzinskaya Bay in Russia.
Apart from tidal reservoirs, one could also use the tidal currents in the oceans.
In particular by making dams between islands (e..g. in the Philippines), the currents
could be channeled through turbines located in the ocean.
=
Tidal power potential
To calculate the total power in the tides for the earth, we assume that 23 of earth is
covered with water. There are no tides at the poles (reducing the potential with a
factor 12 ), and the maximum height (see eq 7.23) is = 054 m. Thus we estimate the
total power in the tides as
=
1× ×
2 1 moved mass × ×
× ×
=
3 2
per time
3
(7.50)
and substituting the numbers,
=
1
3
7.1.4
2
× 054 m × 4 × (6371 × 106 m) × 103 kg m−3 × 98 m s−2 × 12 × 054 m
= 5
125 × 3600 s
(7.51)
which is about 10% of what would be needed by mankind in 2050.
Energy from waves
The motion of the waves on the oceans and seas can also be exploited for energy
harvesting. Waves arise mainly due to the interaction with the wind. If there is a small
wave, the velocity of the air above its crest is larger than in its trough. Hence there
is an upwards pull on the crest (due to the Bernoulli equation, a larger velocity of air
means lower pressure). This upwards pull amplifies the wave. Due to the larger wind
velocity at the crest, the water at the crest moves in the direction of the wind, while
the water at the trough moves in the opposite direction. It is not possible for all the
water to move in the direction of the wind, since that would generate a large pile-up of
water. In conclusion, the water roughly moves in circles, while the wave moves linearly
forward in the direction of the wind, as does the energy in the wave.
We now will derive the velocity of this kind of wave and from that its energy.
118
CHAPTER 7
uc c
2 r
c
c
ut c
2 r
Figure 7.8: The (local) velocities of water in a water wave, from the perspective of an observer
moving with the wave.
Consider a wave moving at velocity . For an observer moving with the wave,
the water (which is static on a large scale) moves with velocity − but there is also
the local rotary motion discussed above, see Fig. 7.8.
If the radius of a wave is and the time of rotation , then for the co-moving
observer, the velocity at the crest and at the trough are:
= − + 2
= − − 2
(7.52)
1
1
+ + 2 =
+ + 2
2
2
(7.53)
From the Bernoulli equation, eq. 6.35,
since = (they are both in contact with the atmosphere) and = 2 + we find
after substitution of eq 7.52
µ
¶2
µ
¶2
1
1
2
2
2 +
=
(7.54)
− −
− +
2
2
and thus after some simplification,
2 −
1 4
1 4
=
2
2
(7.55)
from which
2 22
=
(7.56)
where for the second equality the usual relation between wavelength and period of
oscillation was used: = . From eq. 7.56 one find the velocity of wind-driven
=
119
CHAPTER 7
Figure 7.9: Half a wind-driven water wave.
waves on the surface of the ocean as
=
r
2
(7.57)
Now we are in the position to calculate the energy in such waves. The geometry for a wave of amplitude and wavelength is defined in Fig. 7.9. We find the
potential energy for the ’piece’ of water between and + and between just as above
for the tidal waves. The thickness of the water layer in the direction perpendicular to
the plane of the figure is . The mass of the small ’piece’ of water between and
+ and between and + is
=
(7.58)
The potential energy of this small piece is thus
=
(7.59)
and the total potential energy in the wave is the integral of this (1) over the local height
of the wave and (2) over the whole wave. For (2) we take 2 × the integral over the
crest. Hence for the whole wave
Z = Z = sin 2
2
1
=2
= 2
(7.60)
4
=0
=0
In a harmonic oscillator
kinetic energy = potential energy
120
(7.61)
CHAPTER 7
and hence the total energy in one wavelength is
1
= 2
2
(7.62)
which implies that the total energy per area is
1
¤ = 2
2
(7.63)
For waves of 1 m height we find using eq. 7.63
=
1
× 98 m s−2 × 103 kg m−3 × (1 m)2 = 4900 J m−2
2
(7.64)
and for a typical period of 10 s, the power in such waves is
= 490 W m−2
(7.65)
If we would have an average of such waves over the whole surface of earth, the total
wind-driven wave power would be
¡
¢2
= 490 W m−2 × 4 × 6371 × 106 m = 250 PW
(7.66)
Let us now investigate how realistic this is. As discussed in chapter 3, the energy from
the sun reaching the surface of earth is about 1000 W m−2 However, this is effectively
2
falling on a surface equal to
which means that on average over the whole earth
−2
and day and night, about 250 W m reaches the surface. Clearly eq. 7.65 cannot hold
as average over the whole earth and eq. 7.66 must be an over-estimate. Actually, one
estimates that about 1% of the incident solar radiation is converted to wind, it seems
reasonable that at most about the same amount is converted into water waves.
If we place a buoy of 11 m diameter in water with the kind of waves assumed
above, then such buoy would have a power of about
= 121 m2 × 490 W m−2 = 60 kW
(7.67)
such values are indeed measured at suitable locations at sea. Potential problems for the
conversion of wave energy into electric energy are fouling, mechanical stress of enormous
varying range etc.
To solve the issues, various schemes are used, such as an oscillating water
column (the turbine is in air, not in water) or a tapered channel (creating a small
reservoir), see Fig 7.10 and structures with moving links that couple to generators,
such as the Pelamis, Archimedes wave swing and Salter Duck, see Fig 7.11.
121
CHAPTER 7
Ocilating Water Column
TAPered CHANnel
Figure 7.10: Oscillating water column and tapered channel scheme for extracting energy from
surface waves of the sea.
Salter Duck
Archimedes Wave Swing
Pelamis
Figure 7.11: Various mechanisms for extracting energy from surface waves of the sea.
122
Chapter 8
Wind energy
8.1
Wind energy
As discussed the section on wave power, about 1 − 2% of incident solar radiation is
turned into wind. That is for the whole earth a power of
¡
¢2
001 × 1370 W m−2 × × 6371 × 106 m = 1 7 PW
(8.1)
Of course only a small fraction of this can be realistically harvested, may be only 6
TW. The world electricity demand by 2020 is 3 TW, so the potential contribution from
wind power is not trivial. In the Netherlands on could roughly obtain 5 MW/km2 of
land or sea surface (see the last section of this chapter). Since the Dutch electricity
consumption is about 12 GW, to supply this from wind power, we would need an area
of
12 × 109 W
2
(8.2)
−2 = 2400 km
6
5 × 10 W km
much smaller than the total area of The Netherlands (41526 km2 ). An in fact there are
a large number of plans to build wind parks, of which a number are already realized.
8.2
Wind turbines: the Betz limit
One cannot extract all power from the wind. For simplicity assume that we drive a
vertical slab by a horizontal wind, see Fig. 8.1. The power that can be extracted from
the wind due to the motion of the slab under a force that is due to the wind is
=
(8.3)
where the force is some function ( − ) with (0) = 0 (there is no force
if the slab has the same velocity as the wind. Hence ( = 0) = 0 (no work) and
123
CHAPTER 8
v
u
Figure 8.1: A vertical slab striven forward at velocity by a wind with velocity .
( = ) = 0 (no force). In other words: one can only extract work from the wind at
intermediate velocities: 0 .
We now show that the maximum power that can be extracted from the wind
by a wind turbine can be calculated from simple energy and momentum considerations.
In this treatment we do not look at the details of the air flow. We just assume that the
turbine is transforming some kinetic energy of the wind into mechanical work and that
consequently some momentum is lost by the wind. The effect of the blades is smeared
out on a disk of radius equal to that of the turbine.
8.2.1
Power from kinetic energy of the wind
Consider the air tube shown in Fig. 8.3. The air molecules passing the area during
the short time fill a volume given by
=
(8.4)
The mass of the air contained in this volume is
=
(8.5)
where is the density of the air.
The kinetic energy of the air in the tube shown in Fig. 8.3 is
1
1
= 2 = 3
(8.6)
2
2
The corresponding kinetic energy density (i.e. the kinetic energy per volume) is
124
CHAPTER 8
u1
u2
uo
Ao
A1
A2
Figure 8.2: Overall air flow passing a wind turbine. The area of the air tube well ahead of
the turbine is smaller than that behind the turbine as the wind velocity uo is larger than 2 .
u
A
dx
Figure 8.3: Air tube defined by the movement of the air molecules passing the area A during
the short time dt.
125
CHAPTER 8
u1
u2
uo
Thrust
Ao
A1
A2
Figure 8.4: Wind power before and behind a wind turbine. Before (left) it is = 12 ××3
while after the turbine (right) it is 2 = 12 2 × × 32 .
1
2
1
2
=
= 2
(8.7)
2
and using eq. 8.6, the power of the wind is
1
(8.8)
= 3
=
2
Note that the wind power is proportional to the third power of the wind velocity. A
wind of 20 m/s has thus 8 times more power than a wind at 10 m/s. The power of
wind of 20 m/s in a tube of 10m diameter is
¡
¢3
1
1
(8.9)
3 =
10 m2 × 12 kg m−3 × 20 m s−1 = 37 kW
2
24
note that we cannot extract all of that power, because if we did, the wind would stop
and we would have an accumulation of air. Hence the flow tube must expand at a wind
mill and the question is how to do this optimally.
8.2.2
Change in kinetic energy
The power extracted by the turbine is equal to the difference of the wind power in front
of the turbine and the wind power behind the turbine.
The difference of the two expressions given in Fig. 8.4 is
1
1
= − 2 = 3 − 2 32
2
2
126
(8.10)
CHAPTER 8
As such this expression is not very useful as it contains two unknown areas and one
unknown velocity 2 . We assume here that the wind velocity far from the turbine is
known. As the amount of air is conserved (we assume that air is incompressible) we
must have
= 1 1 = 2 2
(8.11)
(see eq 6.24) and we can re-write Eq.8.10 as
¡
¢
1
= − 2 = 1 1 2 − 22
(8.12)
2
To proceed we consider the thrust, i.e. the force acting horizontally on the turbine
8.2.3
Thrust
From Newton’s second law, the thrust on the wind turbine is equal to the change in
momentum of the air in the time .
= =
(8.13)
By definition the momentum is the product of the mass and the velocity: = . For
the air tube this means
= 2
(8.14)
Substituting eq. 8.14 in eq. 8.13, it follows that
¡
¢
− 2
=
= 2 − 2 22 = 1 1 ( − 2 )
(8.15)
where for the third equality eq. 8.11 was used. Since power is force times velocity, the
power delivered by the wind is
= 1 = 1 21 ( − 2 )
(8.16)
We have now two expressions for the extracted power, eq 8.12 and eq. 8.16. These two
expressions must be equal and thus
or
which implies that
¡
¢
1
1 1 2 − 22 = 1 21 ( − 2 )
2
¢
1¡ 2
− 22 = 1 ( − 2 )
2
1
( + 2 ) = 1
2
or
127
(8.17)
(8.18)
(8.19)
CHAPTER 8
2 = 21 −
(8.20)
= 21 21 ( − 1 )
(8.21)
Thus from 8.16
Note that the only parameters that are assumed to be known are 1 , the area of the
wind turbine, and the wind velocity measured far from the turbine. We still need to
calculate 1 .
8.2.4
Extracted power
We now define a Power Coefficient as the ratio
Power extracted
Power in the wind
From eq 8.8, the power in the wind that passes an area 1 is
(8.22)
:=
1
= 1 3
2
(8.23)
combining with eq 8.21 thus gives
21 21 (0 − 1 )
Power extracted
421 (0 − 1 )
21
=
=
=
4
:=
1
Power in the wind
30
20
1 30
2
µ
¶
0 1
−
0 0
(8.24)
if we define the induction factor as
:= 1 −
1
0
(8.25)
then eq 8.24 can be written as
() = 4 (1 − )2
(8.26)
Hence (combining eq. 8.23 and eq. 8.26), the power generated is
1
= = 1 3 4 (1 − )2
2
(8.27)
The function 4 (1 − )2 is shown in Fig. 8.5. From eq 8.26 we find that the
maximum occurs for
1
max =
(8.28)
3
128
CHAPTER 8
Power coefficient CP
1.0
0.8
0.6
0.4
0.2
0.0
0.0
0.2
0.4
0.6
0.8
1.0
Induction factor
Figure 8.5: Power coefficient as a function of induction factor = 1 −
The maximum Power Coefficient is thus
µ ¶
µ
¶2
1
1 1
16
=4 1−
=
3
3 3
27
1
0
(8.29)
which implies that we can extract at most 16
= 59% of the power from the wind. The
27
extracted power can be calculated by multiplying eq 8.23 by 16
or by using eq 8.21. To
27
do the latter, we note that from eq eq 8.25 and 8.28
=1−
1
1
=
0
3
(8.30)
from which
2
(8.31)
1 = 0
3
substitution in eq 8.21 provides the expression for the total power delivered by the
turbine:
=
21 21
(0 − 1 ) = 21
µ
2
0
3
¶2 µ
¶
8
2
0 − 0 = 1 30
3
27
(8.32)
Combining eq 8.31 and eq 8.20,
2
1
2 = 21 − = 2 − =
3
3
129
(8.33)
CHAPTER 8
Clearly, at maximum power the velocity behind the turbine has dropped to one third
of the undisturbed wind velocity.
In the argument above, we assumed that the incident power of the wind was
1
3
However,
due to the expansion of the wind streamlines in front of the turbine,
1 0
2
one can also argue that the incident power should be taken only from those streamlines
that will finally hit the turbine. In that case = 12 0 30 . We do not need to redo
the whole calculation. We still require that the poweroutput (and not: the effciency)
is maximized: only the numerator of Eq. 8.24 must be maximized, which still requires
= 13 and thus the output power remains the same. Only input power is changed.
0
Combining eq. 8.31 and eq. 8.11 we find
= 23 and changing = 12 1 30 to
1
= 12 0 30 thus reduces by a factor 23 as a consequence (see eq 8.24, is
increased by a factor 32 and we have (from eq 8.29) that
µ ¶
1
16 3
8
=
× = = 89%
(8.34)
3
27 2
9
This argument (from G. N. Tiwari, M. K. Ghosal: Renewable Energy Resources: Basic Principles) is certainly not valid for dense arrays of turbines. Suppose
for simplicity that turbines fully occupy an area perpendicular of the wind 1 .
Then the wind in the upstream area (0 − 1 ) cannot be captured because there is
no place let to put turbines to capture that flow.
It is quite remarkable that we have been able to determine the maximum power
extraction (the so-called Betz limit) without having to consider in detail the air flow
around the turbine blades. The question is, of course, how good this maximum power
calculation is. Modern rotors achieve values for in the range of 0.4 to 0.5, which is 70
to 80% of the theoretically possible. The world’s largest turbines are manufactured by
the Northern German companies Enercon and Repower. The Enercon E-126 delivers
up to 6 MW, has an overall height of 198 m and a diameter of 126 meters The Repower
5M delivers up to 5 MW, has an overall height of 183 m and has a diameter of 126 m.
For comparison, the span of the Airbus 380 is only 79.8 m.
8.2.5
Is Betz limit valid for water flow?
The same reasoning (and Betz law) holds for underwater turbines in the ocean. For
water turbines in pipes for hydropower reservoirs, however, the water after the turbine
can expand freely sideways. Therefore, the velocity after the turbine can be very quickly
reduced or even reversed. As an example consider a Pelton wheel, see Fig. 8.6.
In the Pelton wheel, a high velocity water jet impinges on a semi sphere like
cup, the completely reverses the water flow direction. Thus the force on the wheel is
130
CHAPTER 8
Figure 8.6: Pelton water wheel.
the change in momentum of the water
()
(8.35)
= 2̇ ( − )
where is the waterflow velocity and is the velocity of the wheel. The corresponding
power is
=
which is maximal for =
1
2
= = 2̇ ( − )
(8.36)
hence
1
1
max = 2̇ 2 = ̇2
4
2
and since the power in the waterjet is
1
= ̇2
2
(8.37)
(8.38)
the efficiency is 1:
max
= 100%
(8.39)
Note, however, that in a single fluid, the flow reversal is impossible: then Betz is valid.
=
8.3
Optimal design of turbine blades
From the previous section, we see that a wind turbine must be designed such that the
wind velocity after the turbine is 13 of the undisturbed wind velocity. Now we will
131
CHAPTER 8
L
lift
D drag
l
w
U
Figure 8.7: The drag and lift force components on a wing blade of width and length in
an airflow of velocity
investigate how to design the turbine blades optimally. On a structure in a fluid flow,
there is a drag force component in the direction of the incident flow and a lift force
component in the perpendicular direction. As discussed in the section on general fluid
flow, eq 6.51 and eq 6.52, these components are given by
1
D := = 2
2
(8.40)
and analogously
1
(8.41)
L := = 2
2
where we have substituted = considering the geometry of Fig 8.7
It is illustrative to consider aver simple case where molecules impinge perpendicular on a plate and are reflected back without interaction with the other molecules,
see Fig. 8.8.
The force due to a single molcule is
=
∆ 2
=
∆
∆
(8.42)
and using the mass density =
where is the number of molecules impinging on
the plate in the time ∆ we have = ∆ and hence = ∆
thus we find for the
total force on an area due to all molecules
132
CHAPTER 8
Figure 8.8: Molecules impinging on a plate and reflecting straight backwards without interacting with each other.
= = 22
(8.43)
comparing with eq. 8.40, we find = 4 This is for the unrealistic case of noninteracting molecules (very low pressure).
To proceed, we need to define some further configurations, see Fig
Note that (see Fig 8.9) the incident wind velocity at the blade is 1 and that
the linear velocity of the blade is (this is of course dependent on the position on the
blade as defined by ). An observer on the blade (and the blade itself!) experiences a
relative air speed , which is the result of both the blade velocity and the wind
velocity 1 which are in perpendicular directions. Hence
2 = 21 + 2
and
tan =
1
(8.44)
(8.45)
Also
1 = sin
and
(8.46)
1
(8.47)
sin
We define the angle of attack as the angle between the flat part of the
blade and the direction of the relative air speed . In Fig 8.10 the resulting drag and
lift forces are shown for three different incident wind velocities. Also the components
in the direction of the blade rotation are shown. It is clear that for large wind speeds,
=
133
CHAPTER 8
T
Air speed u 1
Blade speed v
Figure 8.9: Definition of turbine blad configuration parameters.
the drag force can become (almost) equal to the lift force, leading to reduced drive or
even a stall of the turbine. Some turbines are even designed to stall at high winds to
prevent damage.
Before proceeding we note that the coefficients and in eqns 8.41 and
8.40 not only depend on the shape of the object, but also on the angle of attack (Fig
8.9). The dependence on of the lift coefficient for a typical blade is shown in Fig.
8.11
As already stipulated in Fig 8.10, both lift and drag depend on the angle
of attack and a plot showing the dependence of both is given in Fig 8.12. The ratio
occurs for the steepest line through both the origin and a point on the blue
line. Clearly this occurs for ' 6◦ . It also clear that above approximately 10◦ the
drag increases rapidly while the lift is essentially constant. At higher angles there is
even a sharp drop in the lift. Under such conditions stall occurs.
Turbine blade twist
Now we are in a position to discuss the design of optimal blades. We refer again to Fig
8.9 for the geometry. The power delivered by the section of the blade at position is
= L (sin ) = L (sin ) 1 cot = L1 cos
134
(8.48)
CHAPTER 8
force components in de direction of rotation
Weak wind
u1
u
u
u1
u
u1
Optimal wind
Figure 8.10: Drag and lift for various wind speeds
Figure 8.11: Dependence of the coefficient in the lift force = 12 2 on the angle
of attack
135
CHAPTER 8
14o
Lift coefficient CL
7o
6o
0o
-2o
10o
Drag coefficient C D
Figure 8.12: Lift and drag coefficients for various angles of attack as indicated along the
blue curve.
where
= L (sin )
(8.49)
= 1
(8.50)
is the component of L in the direction of blade velocity. Here we ignore drag, because
it is typically much smaller than lift (see Fig 8.12). The second equality holds because
of eq. 8.45. Since L cos is the component of L in the direction of 1 L cos must be
equal to the thrust which is by definition in the direction of the incident velocity.
So we may also write
As we will now see, the above implies that we need to make the blade twisted. For
optimal performance, we need to be in the Betz situation, eq 8.31. Hence
2
1 = 0
(8.51)
3
also from eq. 8.45
1
tan =
(8.52)
and thus
2
0
1
= 3
(8.53)
tan =
136
CHAPTER 8
Figure 8.13: The width of the blade depends on its position .
where from Fig 8.9
(8.54)
2
2
0
0
2
1
= 3 = 3 =
0
3
(8.55)
=
hence
tan =
where we defined the tip speed ratio
:=
0
(8.56)
From eq 8.55 clearly increases for decreasing That means that close to the axis the
blade must be more twisted than at its tip if we want to comply with eq 8.55 to ensure
that we are everywhere along the blade in the optimal (Betz) situation. Indeed twisted
blades are common practice both for wind turbines and propeller blades.
Turbine blade width
To optimize performance, we need not only change the twist as a function of but also
the width of the blade, as we will now show.
From eq. 8.15 we find that position from the axis of the turbine, the total
thrust is given by
= 2 1 ( − 2 ) = 21 2
137
(8.57)
CHAPTER 8
where for the first equality we used that the turbine effectively can be considered as a
disk. For the second equality we used that from eq. 8.31 and 8.33 follows 0 − 2 = 1 .
On the other hand, from eq. 8.41
1
L = 2
2
(8.58)
If we still ignore drag, then we must have that
1
= L cos = 2 cos
2
(8.59)
where is the number of blades. Our two equations for must give the same result
and hence
1
21 2 = 2 cos
(8.60)
2
and with eq 8.47
1
(8.61)
=
sin
this can be simplified to
=
1
2
and from eq. 8.55
³
2
´2
1
sin
=
cos
tan =
and thus
4
sin tan
2
3
2
tan
sin = p
= q 3
¡ 2 ¢2
1 + tan2
1 + 3
substitution of the last two expressions in eq 8.62 gives
¡ 2 ¢2
4
q 3¡ ¢
=
2 2
1 + 3
(8.62)
(8.63)
(8.64)
(8.65)
() is a decreasing function of : according to this equation, the width of the blade
should decrease in the direction away from the axis. Note that we have used again
the Betz velocity ratio’s and that this () thus follows from the requirement that we
want to be optimal everywhere along the blade. Note also that we have ignored the
(small) drag force in this derivation. For a typical turbine of = 24 m and = 8 one
has values for () and () as shown below
138
CHAPTER 8
[ m]
6
12
18
24
8.4
[ m]
2.6
1.4
0.9
0.7
[◦ ]
18.4
9.5
6.3
4.8
Losses
We now discuss various loss mechanisms that were ignored so far:
1. Too large induction factor
2. Drag
3. Rotation of the air
4. Stall (see before)
We now discuss the losses in turn, except stall, which we discussed already
above.
8.4.1
Too large induction factor
From eq 8.28 and 8.33 (first equality) we find 1 = (1 − ) 0 and
2 = 21 − 0 = 2 (1 − ) 0 − 0 = (1 − 2) 0
(8.66)
the last equation implies that
1
(8.67)
⇒ 2 = 0
2
For too large induction factor there would be no velocity in the air after the turbine.
In practice the air does not become static, but turbulent (so called turbulent wake after
the turbine), but in any case the efficiency is drastically reduced.
≥
8.4.2
Effect of drag
If we do include the effect of drag, then the force in the direction of rotation is reduced
(see Fig 8.9) to
µ
¶
D
= L sin − D cos = L sin 1 − cot
(8.68)
L
139
CHAPTER 8
Betz+wake
(see next)
Figure 8.14: Losses due to drag (red line) and rotation of the air (dashed curve) as a function
of tip-speed ratio .
note that from eq. 8.63
3
2
¶
µ
Z
D () 3
=
L () sin 1 −
L () 2
0
cot =
hence
(8.69)
(8.70)
which can be calculated, but depends on the functional dependences D () and L ()
which depend on the exact blade shape. To give some impression, take the effect at
= 2
At that position,
3
µ
¶
µ
¶
2
D
=
= L sin 1 −
(8.71)
3
L
Comparison with eq¡ 8.49 demonstrates
that the force in the direction of rotation is
¢
reduced by a factor 1 − D
Of
course
also
the power output of the turbine is reduced
L
by the same amount.
8.4.3
Rotation of the air
The energy that is given to the air by making it rotate (due to the turbine rotation)
cannot contribute to the power delivered by the turbine:
140
CHAPTER 8
Energy of turbine = loss of KE of wind - gain of Rotational energy of the wind
(8.72)
or
= −
(8.73)
where is the power delivered by the turbine, is the loss in kinetic energy of the
wind and also the output of the turbine which we calculated above for the case that
there was no rotational loss. is the loss due to rotation of the air after the turbine.
Of course, we now would like to know the loss caused by this rotation.
step 1: express in terms of
We rewrite eq. 8.73 as
= +
(8.74)
this may be written as
1 2 2
1
(8.75)
2
where 1 is the angular velocity of the wind; Ω is the angular velocity of the turbine
and is the torque acting on the turbine. If is the (total) torque acting on the air,
then due to conservation of angular momentum
= Ω +
Ω = (−) Ω = Ω
2 1
=Ω
(8.76)
where is the (total) angular momentum of the air. We used the general law =
and = 2 . Hence eq. 8.75 becomes
=
1 2 2
Ω2 1 +
1
2
(8.77)
where
= 1 1
is the mass flow rate of the air and hence
1
= 1 1 2 Ω 1 + 1 1 2 21
2
(8.78)
(8.79)
with the definition
0 :=
1
2Ω
141
(8.80)
CHAPTER 8
this may be written
= 1 1 2 Ω1 (1 + 0 ) = (1 + 0 )
(8.81)
hence
(8.82)
1 + 0
in words: due to the rotation of the air, the output power of the turbine is reduced by
a factor 1(1 + 0 ).
step 2: calculate : the output power
Since we already calculated the power that can be obtained in the absence of
this rotational loss in eq. 8.27, we find that with rotational loss, the generated power
is
4 (1 − )2
1
= 1 3
(8.83)
2
1 + 0
step 3: calculate 0 in terms of
To optimize the output power, we need a relation between and 0 . We note
that was found above in eq. 8.12. Substitution in the left part of eq. 8.81 yields
=
¡
¢
1
1 1 2 − 22 = 1 1 2 Ω 1 (1 + 0 )
2
(8.84)
the left hand side can be rewritten. From eq. 8.66
2 = (1 − 2) 0
hence
¡ 2
¢
0 − 22 = 20 − ((1 − 2) 0 )2 = 420 (1 − )
(8.85)
(8.86)
and substitution in eq. 8.84 gives
1
1 1 420 (1 − ) = 1 1 2 Ω1 (1 + 0 )
2
(8.87)
220 (1 − ) = 2 Ω 1 (1 + 0 )
(8.88)
or
defining
:=
Ω
0
we have
142
(8.89)
CHAPTER 8
Ω
0 =
(8.90)
and substituting in eq. 8.88 yields
2
Ω
(1 − ) = 1 (1 + 0 )
2
(8.91)
with eq. 8.80 or 1 = 20 Ω this implies
2
or
Ω
(1 − ) = 20 Ω (1 + 0 )
2
(8.92)
1
0
0
2 (1 − ) = (1 + )
(8.93)
So we now know 0 .
Step 4: optimize the turbine and calculate the power reduction due to the air
rotation
We want to optimize the power of the turbine (see eq. 8.83) which thus is
1
4 (1 − )2
= 1 3
2
1 + 0
(8.94)
To proceed, we note that 0 should be small, because it is a loss term. In
other words, we should optimize the turbine such that 0 is small. Assuming that we
have succeeded, 0 1 and from eq. 8.93
so
1
0
2 (1 − ) =
(8.95)
2
4 (1 − )2
1
1
3 4 (1 − )
3
' 1
= 1
2
1 + 0
2
1 + 12 (1 − )
(8.96)
0
this can be optimized in terms of Since is small, the optimization of this equation,
is practically equivalent to optimizing eq. 8.27. Hence we obtain here
1
3
(8.97)
2 1
9 2
(8.98)
'
and substituting in eq. 8.95 we find
0 =
143
CHAPTER 8
If we use a tip speed ratio = 23 as representative, then
1
22
(8.99)
1 + 212
(8.100)
0 =
and substituting in eq. 8.82
=
The resulting loss in efficiency is plotted as the dashed line in Fig. 8.14. Note
that there is only a significant loss for small tip-speed ratio’s.
8.5
Turbine design
To first order, the number of blades is irrelevant. With more blades, the torque on the
shaft is larger due to a larger area experiencing the wind force. However, the interference
between blades increases, leading to a lower torque. These effects compensate roughly:
with many blades there is a large torque and slow rotation , with few blades there is
a small torque , but fast rotation . Since = is roughly constant. However,
turbines with fewer blades have less weight and are cheaper to produce. Also a faster
rotation leads to smaller turbines because for the same electrical power the flux trough
the coils is reduced and hence their size. Also for larger tip speed, a smaller gear box
is needed. Another effect is more subtle: for larger tip velocity, the relative velocity
air-tip is larger, which increases the so-called Reynolds number and the Lift coefficient
increases (slightly) with increasing Reynolds number (see Aldo Vieira da Rosa fig 15.18).
There is one disadvantage: for larger tip speed a larger number of revolutions
takes place in the life time of the turbine. This implies that the allowed stresses are
rather low. The failure point is determined by the stress and the number of cycles in
such a way that the allowed stress is reduced of the number of cycles increases.
Typically for large turbines the ratio
Energy generated in a year
' 30%
Rated power × 1 year
(8.101)
For turbines, big is beautiful: there is more wind power at greater height and the
amount of construction material for the turbine and infrastructure (cables etc.) per
Watt output decrease for increasing size.
Turbines rotate at variable speed due to the varying strength of the wind. To
adapt the varying rotation to the required fixed 50 Hz frequency of the power grid, a
gear box is used. Alternatively, an AC-DC-AC converter can be used, where the first
AC is of variable frequency and the last is 50 Hz.
144
CHAPTER 8
load is adjusted for
pitch is adjusted to maintain
optimal rotational speed
max. rotational speed
feathering
or
stall-by-design
Figure 8.15: Turbine control and operation. For low wind speeds, the load is adjusted for
optimal rotational speed, above the ’rated’ wind speed, the maximum output power is reached
and the input power must be reduced by changing the pitch. At very high wind speeds, to
prevent damage, the turbine should either stall by design, or the control system should feather
the blades (turn them to have no torque on the axis).
The turbine must be controlled for optimum output, see Fig 8.15. For low
wind speeds, the load is adjusted for optimal rotational speed, above the ’rated’ wind
speed, the maximum output power is reached and the input power must be reduced by
changing the pitch. At very high wind speeds, to prevent damage, the turbine should
either stall by design, or the control system should feather the blades (turn them to
have no torque on the axis).
8.6
Wind properties
Wind is found to roughly obey the Rayleigh distribution
() =
with the normalization constant
2 −()2
2
2 hi
= √
(8.102)
(8.103)
where hi is the average wind speed. Note that () is the probability density for
observing a velocity .
A typical plot is shown in Fig
The power in the wind (see eq. 8.8) is given by
145
CHAPTER 8
Figure 8.16: Example for Rayleigh wind speed distribution, in this case with a mean speed
op 8 m s−1 .
1 ®
= 3 ' hi3
2
where the last approximate equality holds because
1 3® 1
=
2
2
Z
0
∞
2
2
3 2 −()
3 √
3
= 3 =
8
8
µ
2 hi
√
¶3
(8.104)
√
= 0954 95 hi3 ' hi3
(8.105)
A turbine of diameter the area = 4 2 thus would capture
2
hi3
(8.106)
4
The power output of the turbine is about 3× lower due the Betz limit and the other
losses discussed. One important factor reducing the efficiency is that sometimes the
wind velocity is too low for the turbine to be able to operate in the Betz limit, increasing
the loss significantly. Hence we find roughly
' hi3 =
1 2
hi3 ' 0262 hi3
(8.107)
3 4
the power goes as the square of the blades diameter (big is beautiful) and with the third
power of wind speed. Since wind speed increases with height, again, big is beautiful.
'
146
CHAPTER 8
8.7
Wind farms
In a wind farm, the turbines should no affect each other too much. In practice this
requires a distance of about 5 − 10 between the turbines (then the loss is about 10%).
Per area of a wind farm, we can place turbines with
=
(10)2
(8.108)
the total power generated per area of wind farm is
0262 hi3
026 hi3
=
'
' 5 4 W m−2
=
1002
100
(8.109)
where hi = 12 m s−1 was used. The result of eq. 8.109 amounts to an output for wind
farms of about 5 MW km2 to first order independent of the size of the turbines (of
course their height does matter). This justifies the calculation done in eq. 8.2.
8.8
Other ideas
There are various other ideas to harvest the energy of the wind at higher altitude than
one can possibly or wants to put the turbine. One idea, of the Dutch astronaut Wobbo
Ockels is to use a ladder of kites under remote control, that continuously drive a belt
connected to a generator, see Fig. 8.17. Clearly the latter system will not be easy to
operate and there are many safety concerns, both for air traffic and the ground, but
the large output power is very tempting.
There exist other kite-schemes, all based on the idea that controllable kites
can be used to drive a ground based generator. See for example Fig. 8.18.
147
CHAPTER 8
50 kW
1 MW
100 MW
Figure 8.17: Left: traditional Dutch mill with typically 50 kW output. Middle: modern 1 MW
turbine. Right: kite-ladder scheme of Wubbo Ockels generating 100 MW
148
CHAPTER 8
Figure 8.18: The KiteGen scheme. A ground based generator is driven by high flying controllable kites.
149
Chapter 9
Photovoltaic energy
9.1
The Free-Particle Schrödinger Equation
From quantummechanics, it is known that the probablity of finding a particle at a
position while it is under influence of a potential () is given by |Ψ ()|2 with Ψ ()
a solution of the Schrödinger equation
~2 2 Ψ
Ψ
+ ()Ψ = ~
2
2
In presence of a constant potential the Schrödinger equation becomes
−
(9.1)
~2 2 Ψ
Ψ
+
Ψ
=
~
(9.2)
2 2
The solution of this equation is exp [ ( − )] as can be verified by subsitution in eq. 9.1. The result is
−
~2 2
2
+ = ~ =
+ =
2
2
(9.3)
In other words the two terms on the left hand side of Eq. 9.1 represent the
kinetic and potential energy of a particle of total energy .
9.1.1
Free particle in a box
Consider a particle in a 1-dimensional box that extends from = 0 to = . In the
box the particle is totally free and we take the potential equal to zero. The walls
of the box are however super hard so that the particle cannot escape. We can model
super hard walls by taking the potential energy for 0 and infinitely large.
We have then in the box
150
CHAPTER 9
−
Ψ
~2 2 Ψ
= ~
2
2
(9.4)
and outside the box
~2 2 Ψ
Ψ
+ ∞ ∗ Ψ = ~
(9.5)
2
2
Outside the box the only possibility is Ψ = 0. Inside the box, the solution is
[(−)]
, introduction of this expression in Eq. 9.1 gives
−
~2 2
= ~ =
(9.6)
2
Note that [(−−)] is also a solution. Any linear combination of these two
solutions is also a solution of the problem. Thus
Ψ( ) = [(−)] + [(−−)]
(9.7)
is also a solution. But which combination is really the solution. To find it out
we need to consider the boundary conditions resulting from the super hard walls, e.g.
Ψ = 0 for = 0 and = at any time . At = 0
− + − = 0
(9.8)
implies that = − and consequently,
¡
¢
Ψ( ) = [(−)] − [(−−)] = 2 sin () −
(9.9)
At = we have
Ψ( = ) = 2 sin () − = 0
(9.10)
which implies that
=
(9.11)
where is an integer i.e. = 1 2 3. . . .. Note that = 0 is no option as it
would imply that the particle is nowhere. The solution is thus finally
³ ´
Ψ( ) = 2 sin
− ~
(9.12)
in which we have replaced by ~. Going back to Eq. 9.6 we find from
9.12,
151
CHAPTER 9
~2 2 2
~2 2
=
(9.13)
2
22
This result is very important as it shows that the energy of the particle is
quantized. It can only assume discrete values. A practical way of representing energy
levels and the corresponding quantum states is indicated in Fig. 9.1. In order to draw
the wave functions and the probability densities we needed to know the value of the
amplitude A. The value of A is determined by physics! If the square of the norm of
the wave function is to represent a probability then it is obvious that
Z
|Ψ ( )|2 = 1
(9.14)
=
0
Since the probability to find the particle in the box must be 1. Inserting Eq.
9.6 into Eq.9.14 we obtain that
Z
0
2
2
|Ψ ( )| = 1 = 4
Z
0
³ ´
³ ´
sin
− ~ sin
+ ~
(9.15)
and
2
4
Z
0
And finally
³ ´i2
sin
= 22 = 1
h
r
(9.16)
³ ´
2
sin
−
(9.17)
Although the wave function does depend on time, the probability density
2 h ³ ´i2
|Ψ ( )|2 =
sin
(9.18)
depends only on position, see Fig. 9.1.
Where there are nodes in the standing waves, the probability density is zero.
But how, we might ask, can the particle get from one place in the well to another if there
is no possibility of it ever being found at a point in between? The answer is simple: It
is a wave, not a particle. As we know from a study of classical waves, standing waves
may be thought of as two waves passing one another in opposite directions. Although
they bounce back and forth, there are nodes where the displacement is always zero.
We cannot demand that the “particle” behave as a classical particle. For one thing, it
cannot be “watched”; the photons that would have to be bounced off the particle would
Ψ ( ) =
152
CHAPTER 9
n
n
2
Figure 9.1: The six lowest energy states of a particle in a super hard box. For this example
we have chosen ~2 = 1 and = 2. The problem is treated in one dimension. The black
curve represents the potential seen by the particle: it is taken to be zero between = −
and = . Outside this range it is infinitely high. These funny values are just chosen for
numerical simplicity. The ground state energy is then 0.125. The energy of the first excited
state ( = 2) is then 0.500, that of the second excited state 1.125, etc. The ground state
corresponds to the red curve. It is plotted in such a way that the −axis is placed at position
0.125. The first excited state, which corresponds to the green curve, is similarly plotted with
its −axis at 0.500, and so on. All the wave functions have zero amplitude at the boundary
of the well. The probability density to find the particle at the well edge is thus zero. The
increasing number of oscillations, or what is equivalent, the decreasing wave length of the
wave function (for increasing ), reflects the increasing of the kinetic energy.
153
CHAPTER 9
introduce potential energies () that have not been taken into account in our solution
of the Schrödinger equation. The assumed simplicity of the situation forbids our having
detailed knowledge of the particle’s activities. On the other hand, lack of knowledge
of precise whereabouts is a fact in all the real situations to which quantum mechanics
is applied. We cannot, for example, say exactly what an electron orbiting a nucleus
is doing. But despite these limitations, in microscopic applications, the predictions of
quantum mechanics have succeeded, while those of classical physics have failed.
The standing wave of lowest energy is known as the ground state and its
energy as the ground-state energy (or zero-point energy). It is in the ground state
that quantum-mechanical behavior deviates most from the classical expectation. Most
importantly, the kinetic energy is not zero: a bound particle cannot be stationary. This
is a direct consequence of the uncertainty principle of Heisenberg; to have a position
uncertainty comparable to and a certain momentum of zero is impossible. Another
deviation from the classical is that in its ground state the particle is most likely to be
found near the center. Classically, if we were to “turn on the lights” suddenly and catch
the particle somewhere in the course of its constant-speed back-and-forth motion, it is
equally likely to be found anywhere within the well. As we see in Fig. 9.1, the larger
the , the more evenly the probability of finding the particle is spread over the well in
agreement with the classical expectation.
9.1.2
Particle in a finite potential well
In the infinite potential well problem treated in the previous Section, we analyzed
the simplest possible bound-state problem. We now turn to a more realistic case: a
potential well with finite potential energy walls, see Fig. 9.2. Although more realistic,
it is also more difficult to analyze. It is mathematically impossible to solve for the
quantum energy levels in closed analytic form.
In other words it is not as clean a problem. However, it actually differs in
few ways from the infinite well. Our major concern in this section is to illustrate
the important physical consequences of these differences. We need now to distinguish
three regions. In each region the wave function is given by another expression. The
amplitudes are determined by the following conditions:
1. The wave function must be continuous everywhere and thus also at = 0 and
=
2. The first derivative of the wave function must be continuous everywhere, i.e. also
at = 0 and =
3. The wave function must be normalized to guarantee that the probability to find
the particle between −∞ and ∞ is 1.
154
CHAPTER 9
Uo
E
De ax
Ce ax
A sin( kx ) B cos( kx)
Figure 9.2: Wavefunction for a particle in a finite potentail well.
It is not the purpose of this course to give more mathematical details. It is,
however, very important to remember the effect of the finiteness of the potential barrier
on the wave function of the particle.
9.2
9.2.1
Simulating molecules and solids
Single electron approximation
The simplest possible model of a solid is a linear chain of identical atoms. This is
still a formidable problem that cannot be solved exactly. We consider thus the much
simpler problem of one electron and protons. The separation between two adjacent
protons is . The potential seen by the electron results from the Coulomb attraction
with all protons and is periodic
The Schrödinger equation is then
~2 2 Ψ()
+ () Ψ () = Ψ ()
(9.19)
2 2
The potential () seen by the electron is obviously periodic as a result of
the assumed regular arrangement of the atoms along the chain.
At this point it is useful to give some simple examples of the ideas described
so far. For this we consider the simple case of a 2-square well “molecule”. We see that
the ground state of the 1-well leads to 2 groups of 2 states. For a 3-square well “solid”
we obtain two groups of 3 states. For a solid consisting of N -square wells there will be
2 groups of N states. Each of these groups is called an energy band, see Fig. 9.4 and
9.5.
The lower band (often called the valence band) is relatively narrow since the
wave functions do not overlap very much. The upper band (often called the conduction
−
155
CHAPTER 9
n
n
2
Figure 9.3: The six lowest energy states of a particle in a box with “soft”walls. By soft we
mean walls characterized by a finite potential energy. For this example we have again chosen
~2 = 1 and = 2. The problem is treated in one dimension. The black curve represents
the potential seen by the particle: it is taken to be zero between = − and = . All
the wave functions have non-zero amplitude at the boundary of the well. This is completely
different from the situation encountered in classical mechanics. It means that in quantum
mechanics a particle is allowed to be in a region of space that is classically forbidden.
156
CHAPTER 9
Figure 9.4: Energy levels for one (left) and two square potential wells (right). Note that
there are two groups of bonding and antibonding states (red+blue and green+yellow), which
correspond roughly to the energy levels of the single well.
Conduction band
N levels
Valence band
N levels
Figure 9.5: (upper panel): Energy levels for one and three square potential wells. There are
still two groups of levels, but now each group contains 3 states. (lower panel): for a linear
chain of atoms there are levels in the lower band called Valence band and levels in
the upper band called Conduction band. We shall see later, that each level can accommodate
at most 2 electrons.
157
CHAPTER 9
band) is significantly broadened. For a real solid, which contains 1029 atoms per m3 ,
each atomic level leads to a band with 1029 levels !
9.2.2
The ground state of an -electron system
Until now we have only considered one electron in the potential set up by ions. The
ground state of the -electron system is obtained by simply filling all the one-electron
levels, starting from the bottom of the lowest band and taking into account Pauli’s
principle.
Depending on the number of electrons per atom (until now we talked only
about hydrogen with one electron per atom, but in other elements there are in general
more valence electrons), the energy of the highest occupied state may fall within a
band or “between” two bands. The reason for this is simple. As seen above, there
are different states in a band. Each state within a given band can be occupied by
one spin-up and one spin-down electron. Each state can thus accommodate at most
two electrons in accordance with the Pauli principle. Each band provides thus space
for 2 electrons. For a chain (or solid) made of hydrogen atoms this implies at zero
Kelvin that the band is half filled as clearly shown in Fig. 9.6. When the temperature
increases some electrons are excited to slightly higher energy levels as shown in Fig.
9.7.
Another case is shown in Fig. 9.8.
Both materials (the one with 1 valence electron per atom and the one with 3
valence electrons per atoms) have half filled bands. In presence of an electric field the
electrons can be excited to empty energy levels just above the Fermi energy and they
can carry an electrical current. These materials are thus conductors, i.e. metals.
Metals are characterized by a low electrical resistivity that increases with increasing
temperature as shown in Fig. 9.9.
9.3
Semiconductors
A completely different behaviour is observed for materials such as Silicon (Si) and Germanium (Ge). For them the electrical resistivity is very high at low temperatures but
it decreases rapidly with increasing temperature. Closer inspection of the experimental
data in Fig. 9.10 reveals that there is a characteristic temperature dependence. This
is clearly shown by replotting the data as a function of the inverse temperature rather
than simply . One obtains then the graph in Fig. 9.11.
The temperature dependence of the resistivity shown in Fig. 9.11 implies the
following relation between resistivity and the absolute temperature
158
CHAPTER 9
5
4
Energy
3
2
1
0
0.0 0.2 0.4 0.6 0.8 1.0
Fermi-Dirac distribution
Figure 9.6: The ground state of a linear chain of 12 hydrogen atoms (left panel). The degree
of occupation of states (per spin) is given by the Fermi-Dirac function () in the right panel.
The Fermi energy is set equal to 1.75 in this example. The occupied states are indicated
as red filled circles. The states below the Fermi energy are all filled and those above the Fermi
energy are all empty.
159
CHAPTER 9
5
4
Energy
3
2
1
0
0.0 0.2 0.4 0.6 0.8 1.0
Fermi-Dirac distribution
Figure 9.7: The occupation of electronic states of a linear chain of 12 hydrogen atoms at
high temperature (left panel). The degree of occupation of states (per spin) is given by the
Fermi-Dirac function () in the right panel. The Fermi energy is set equal to 1.75 in this
example. The occupied states are indicated as red filled circles. The states below the Fermi
energy are mostly filled and those above the Fermi energy are mostly empty.
−
=
2
(9.20)
where is the energy gap between the valence band and the conduction
band in Fig. 9.12.
As seen in Fig. 9.13, the states below the Fermi energy are mostly filled (but
there are clearly unoccupied states, called holes) and those above the Fermi energy are
mostly empty. There is, however, a non-negligible number of electrons at the bottom of
the conduction band. It is these electrons in the upper band and the holes in the lower
band that can carry electrical current. The number of these charge carriers depends
clearly on temperature. The higher the temperature the more carriers there are and
the lower the resistivity.
As the amount of charge carriers determines the conductivity of a solid it is
now useful to estimate how their number depends on temperature. For this we need
to look at the Fermi-Dirac distribution function () that gives the probability that a
level of energy is occupied by an electron,
1
(9.21)
+1
For energies such that − À the Fermi-Dirac function reduces to
() =
((− ) )
160
CHAPTER 9
5
4
Energy
3
2
1
0
0.0 0.2 0.4 0.6 0.8 1.0
Fermi-Dirac distribution
Figure 9.8: The occupation at high temperature of electronic states of a linear chain of 12
atoms with 3 valence electrons per atom at high temperature (left panel). The degree of
occupation of states (per spin) is given by the Fermi-Dirac function () in the right panel.
The Fermi energy is set equal to 4.0 in this example. The occupied states are indicated
as red filled circles. The states below the Fermi energy are mostly filled and those above the
Fermi energy are mostly empty.
161
CHAPTER 9
Electrical resisitivity
3.0
(cm)
2.5
2.0
1.5
1.0
0.5
0.0
0
50
100 150 200 250 300 350 400
Temperature (K)
Electrical resistivity
Figure 9.9: Electrical resistivity of a typical metal. At zero Kelvin the resistivity is small
but finite because of imperfections and impurities in the material. Above 100 K it increases
linearly with increasing temperature as a result of scattering of conduction electrons with the
thermally agitated metal atoms. Note that the scale is in micro-Ohm.cm
1E8
1E7
1000000
100000
10000
1000
100
10
1
0.1
0.01
1E-3
cm
0 100 200 300 400 500 600 700 800 9001000
Temperature (K)
Figure 9.10: Electrical resistivity of a typical semiconductor. At zero Kelvin the resistivity is
huge. With increasing temperature it decreases by many orders of magnitude. Note that the
scale is in now in Ohm.cm. At 1000 K the resistivity is still much higher than for a metal.
162
Electrical resistivity
CHAPTER 9
1E8
cm
1E7
1000000
100000
10000
1000
100
10
1
0.1
0.01
1E-3
0.000
0.002
0.004
0.006
-1
1 / Temperature (K )
Figure 9.11: Electrical resistivity of a typical semiconductor plotted now as a function of the
inverse temperature. We obtain essentially a straight line.
5
4
Energy
3
Egap
2
1
0
0.0 0.2 0.4 0.6 0.8 1.0
Fermi-Dirac distribution
Figure 9.12: The occupation at medium temperature of electronic states of a linear chain of
12 atoms with 2 valence electrons per atom at high temperature (left panel). The degree of
occupation of states (per spin) is given by the Fermi-Dirac function () in the right panel.
The Fermi energy is set equal to 4.0 in this example. The occupied states are indicated
as red filled circles. The states below the Fermi energy are filled and those above the Fermi
energy are empty.
163
CHAPTER 9
5
4
Energy
3
2
1
0
0.0 0.2 0.4 0.6 0.8 1.0
Fermi-Dirac distribution
Figure 9.13: The occupation at very high temperature of electronic states of a linear chain of
12 atoms with 2 valence electrons per atom at high temperature (left panel). The degree of
occupation of states (per spin) is given by the Fermi-Dirac function () in the right panel.
The Fermi energy is set equal to 4.0 in this example. The occupied states are indicated
as red filled circles.
f(
1.0
0.5
0.0
0.0
0.5
1.0
200
1.5
2.0
Energy eV)
2.5
3.0
400
600
er
mp
e
T
800
1000
re
atu
T(K
)
Figure 9.14: Fermi-Dirac distribution function for temperatures between 0 and 1000 K. For
this example the Fermi energy, is taken equal to 2 eV.
164
CHAPTER 9
() ∼
= −(− )
(9.22)
It is this exponential dependence that is at the origin of the strong temperature
dependence of the electrical resistivity of semiconductors.
9.3.1
Impurity states: doping
It is a well-known experimental fact that the electrical properties of semiconductors
are drastically modified by the presence of impurities. For example, an additional 10
ppm boron (B) in Si increases the conductivity of Si by a factor of 1000. One ppm
means 1 part per million: in other words 1 impurity atom per 1000000 silicon atoms.
Si has 4 valence electrons and crystallizes in the so-called diamond structure. The lines
between ions represent covalent bonds (each bond accommodating 2 electrons). If one
of the Si atoms is replaced by a Boron atom of valence 3 (in place of B one can also use
Al, Ga or In) then one of the bonds will have a hole in which a valence electron could
jump. If one electron is accepted by the Boron atom (which is called an acceptor)
then a hole is created in the valence band. We can also consider the inverse case: if P,
As or Sb is added to Si, then there is one electron in excess which moves around the
pentavalent impurity (since 4 electrons are occupying bond states). The Coulomb field
seen by the electron is that of a (+) charge). One must not forget here that the excess
electron is moving in a polarizable medium and that, consequently, it does not see the
bare vacuum Coulomb potential
() =
−2
40
(9.23)
but the screened potential
−2
(9.24)
() =
40
where is the dielectric constant of the material under consideration. This
implies that the extra electron is only very weakly bound to the +1 excess charge of
the phosphorous atom, see Fig. 9.15.
The ionization energy of the electron around a donor impurity (this is the
energy required to free the electron from the donor) is just a few 0.01 eV. This means
that if this energy is provided to the electron it will leave the P atom and travel through
the crystal as a free conduction electron.
In presence of donor impurities we have to modify the representation of electronic energy levels used so far in previous figures. Look for example at Fig. 9.12:
the left panel has horizontal black lines that represent the energy levels. The length of
165
CHAPTER 9
P
(+5)
Si
(+4)
Figure 9.15: Phosphorous (P; valence 5) impurity in silicon (valence 4). The extra electron
of P is very loosely bound to the +1 effective charge of the Phosphorous. Its effective Bohr
radius is of the order of 10 nm instead of 0.05 nm for the electron in a Hydrogen atom.
these black lines have no physical meaning. Neither does the position of the red dots
indicating which levels are occupied. I could have placed them at any position on the
black lines. Now let us consider a doped semiconductor. Here and there a P atoms has
replaced a Si atom. We want to represent this situation in a combined picture: one in
which we give information both on the allowed quantum mechanical energy levels and
on the position of the impurity levels. In Fig. 9.16 we first show the correspondence
of the new representation with that in Fig. 9.12 at low temperatures (by low we mean
that ¿ ) and that in Fig. 9.17 at high temperatures.
After this presentation we can now move to situations where electron donors
have been added to the semiconductor. We obtain then the situation in p-n junctions.
9.3.2
p-n junctions
It is possible to produce silicon crystals in which there are both p-type and n-type
regions separated by a very narrow transition region (called the p-n junction). The
width of this junction is of the order of 10−6 m and is thus much smaller than the
diffusion length of electrons or holes. The n-region is obtained by doping a crystal with
donor impurities and the p-region (of the same crystal) is obtained by doping with
acceptor impurities. In a Gedankenexperiment we visualize the fabrication of the p-njunction as follows. We first prepare two separate samples: a p-type Si sample and a
n-type Si sample. Then, at time = 0, we bring both samples into close contact with
each other. As the two samples get closer and closer electrons can flow from the n to
the p side.
As the Fermi energy is by definition the energy under which all the states are
occupied and above which all are empty we expect that the bands will shift in such
a way that the Fermi energy is the same everywhere. We indicate now systematically
166
CHAPTER 9
Conduction band
Fermi
energy
EF
Energy gap Egap
Valence band
x-axis
Figure 9.16: The occupation at low temperature of electronic states of a linear chain of 12
atoms with 2 valence electrons per atom (left panel). On the right panel we indicate the
energy bands that are allowed: in blue the valence band and in gray the conduction band.
We will see later that for example in a p-n junction the position of these bands depends on
position in the doped semiconductor.
Conduction band
Energy gap Egap
Fermi
energy
EF
Valence band
x-axis
Figure 9.17: Same as in Fig. 9.16 but now at much higher temperatures. The occupied states
are indicated as red filled circles. They correspond to electrons thermally excited across the
energy gap from the valence band to the conduction band of the semiconductor. The missing
electrons in the valence bands are indicated with white dots. They are called holes.
167
CHAPTER 9
Conductionband
Conduction band
EF
EF
Egap
Egap
Valence band
Valence band
x-axis
x-axis
Figure 9.18: Band structure of a n-type semiconductor, that is a semiconductor doped with
donor impurity atoms. Left panel: At very low temperature all donor electrons are bound
to the impurities. Right panel: At moderate temperatures nearly all the impurities have lost
their electron which are now donated to the conduction band. The temperature is however
too small to excite electrons from the valence band to the conduction band. Note that the
Fermi energy has fallen below the donor levels.
what happens with electrons and holes when the n- and p- sides are brought into contact
with each other. Just after the two separate crystals (one p-type, the other n-type), are
brought in contact with each other, the electrons, which are much more concentrated
on the n-side than on the p-side start to diffuse into the p-region. Similarly the holes
diffuse into the n-region since they are much more concentrated on the p-side. At
equilibrium ( = ∞) the carrier concentration is as indicated in Fig. 9.24 and Fig.
9.26. It exhibits a very sharp drop at = and = − . This can be understood as
follows: The diffusion of electrons from n to p and the diffusion of holes from p to n
cannot last forever because of the resulting space charge of the ionized donors on the
n-side and acceptors on the p-side. This dipole-layer induces an electrical field directed
in such a way as to inhibit a further diffusion of electrons and holes. This electrical field
is proportional to and from charge neutrality = . This explains why
and are finite. The sharp drop at and is a consequence of a law that states
that the product of electron concentration in the conduction band times the hole
concentration in the valence band is constant [this law cannot be derived within
the framework of this lecture]. Typically = 1026 cm−6 . Far from the junction
= and = (−∞) on the n-side and = and = (∞) on the p-side.
For a typical semiconductor with = 1017 cm−3 we have thus (∞) = 109 cm−3 .
168
CHAPTER 9
Conduction
Conduction
Egap
Egap
EF
EF
Valence band
Valence band
x-axis
x-axis
Figure 9.19: Band structure of a p-type semiconductor, that is a semiconductor doped with
acceptor impurity atoms. Left panel: At very low temperature all acceptors are empty. Right
panel: At moderate temperatures all the impurities have captured an electron from the valence
band. The temperature is however too small to excite electrons from the valence band to the
conduction band.
Somewhere between − and + we must therefore have = . This implies
= = 1013 cm−3 at this point. As can be seen by comparing this value with
= 1017 cm−3 the carrier concentration is 104 times smaller in the junction region
than far away from it. This is the reason why this region is called the depletion
region.
We have now all ingredients to understand the rectifying properties of a p-n
junction. The electrical field E set up by the charges in Fig. 9.29 makes it difficult for
electrons to diffuse from the n-side to p-side and for holes to diffuse from p to n. It
is, however, not high enough to prevent every electron to travel from n to p because
electrons can recombine with one of the many holes on the p-side. There is thus always
a certain recombination current from n to p for electrons (similarly from p
to n for holes). At equilibrium, (or ) is, however, exactly compensated by (or
), the so- called generation current: it is obvious from Fig. 9.30 that if an electron
excited thermally on the p-side reaches the depletion region it will be accelerated by
the electrical field towards the n-region.
The compensation
=
(9.25)
is necessary to prevent a piling up of charges on one side of the junction. Let us now
169
CHAPTER 9
Conductio
ban
EF
Egap
Valence
x-axis
Figure 9.20: Same as in Fig. 9.18 but now for a n-type semiconductor at much higher
temperatures. In addition to the electrons donated by the donors there are electrons which
have been excited out of the valence band. They leave behind holes in the valence band.
Both the electrons in the conduction band and the holes in the valence band can conduct
electricity.
170
CHAPTER 9
Conductio
ban
Egap
Valence
x-axis
Figure 9.21: Same as in Fig. 9.19, but now for a p-type semiconductor at high temperatures.
In addition to the electrons captured by the acceptors there are electrons which have been
excited out of the valence band. They leave behind holes in the valence band. There are more
holes than electrons. As in the previous figure both the electrons in the conduction band and
the holes in the valence band can conduct electricity.
171
CHAPTER 9
n- doped
p- doped
Conduc tion
Conduction
EF
E gap
E gap
Valence band
Valenc e band
x-axis
x-axis
Conduction
Conduction
E gap
EF
Eg ap
Valence band
Valence band
x-axis
x-axis
Figure 9.22: Shift of the energy bands when a p-doped and a n-doped semiconductor are
brought into contact. At the end the Fermi energy is constant throughout the p-n-junction.
172
CHAPTER 9
Impurity concentration
Nd
Na
n-type
p-type
x
Figure 9.23: Concentration of donors and acceptors on both sides of our idealised p-n junction.
On the p-side = 0 and on the n- side = 0. At sufficiently high temperatures (certainly
at 300 K) all the donors are ionised. The electron concentration on the n-side is equal to .
Similarly, the hole concentration on the p-side is equal to
Electron concentration
Nd
x
Figure 9.24: Electron concentration as a function of time. Far from the junction we assume
that at the temperature of interest all the donors are ionized. Immediately after “gluing”
the p-side with the n-side the electrons close to the junction spill over to the p-side because
of the sharp concentration gradient at = 0. The electric field which is set up leads to
an equilibrium electron concentration profile with a sharp edge at a distance , from the
junction.
173
CHAPTER 9
Total charge density in
equilibrium
eNd
+
dn
x
Figure 9.25: Total charge density on the n - side. The electrons that have diffused from
the n-side to the p-side leave an overall positive space charge behind (ionized donors) on the
n-side
Hole concentration
Na
t=0
t=
x
Figure 9.26: Hole concentration. Far from the junction we assume that at the temperature
of interest all the acceptors are ionized. Close to the junction the holes spill over to the
n-side because of the sharp concentration gradient at = 0. The electric field which is set
up leads to an equilibrium hole concentration profile with a sharp edge at a distance from
the junction.
174
CHAPTER 9
Total charge density in
equilibrium
dp
_
x
-eNa
Figure 9.27: Total charge density on the p - side. The holes that have diffused from the p-side
to the n - side leave an overall negative space charge behind (ionized acceptors) on the p-side
Total charge density near
the p-n junction
eNd
+
dp
_
dn
x
-eNa
Figure 9.28: Charge density around the p-n junction obtained by superposition of the charges
in Fig. 9.25 and Fig. 9.27. The resulting dipole layer leads to an electric field so that the
potential energy of an electron on the p-side is higher than on the n-side
175
CHAPTER 9
Jnr
Jng
Jpg
Jpr
real space coordinate
Figure 9.29: Position of the energy bands near a p-n junction. The black dots and the white
dots indicate symbolically the concentration of electrons and holes, respectively. The chemical
potential (red line) is constant as required by general thermodynamical considerations.
apply an external voltage and see what happens to the bands shown in Fig. 9.30.
The generation current remains approximately constant as it is controlled
by the excitation rate of electrons in the bulk of the p-material (far from the junction;
do not forget that + ∼ 10−4 cm, while the diffusion length for holes and electrons
is 10−1 cm). The recombination current, on the other hand, depends critically on the
height of the barrier. We have
( ) = ( = 0)
(9.26)
if we assume that the Fermi-Dirac distribution can be approximated by a
Boltzmann-distribution. Note that the voltage in the backward regime considered here
is negative. The total electron current (number of electrons/m2 s) is thus
= ( ) − ( ) =
= ( ) − ( = 0)
¡
¢
= ( = 0) − ( = 0) = ( = 0) − 1
(9.27)
The electrical current due to the electrons is
¡
¢
= − = − ( = 0) − 1
176
(9.28)
CHAPTER 9
Jnr
Jng
Jpg
Jpr
real space coordinate
Figure 9.30: Effect of an external voltage on the energy bands near a p-n junction. The
voltage is such that the p-side becomes less attractive for electrons. In other words the
negative electrode of the battery is connected to the p-side. The generation currents of
electrons and holes is essentially not affected by the voltage. However, the recombination
currents decrease strongly since the charge carriers have now to climb up a higher hill. This
is the backward voltage regime.
177
CHAPTER 9
Figure 9.31: Current () versus voltage( ) characteristics for a germanium p-n junction.
Note the marked asymmetry between the forward regime ( 0) and the backward regime
( 0), which leads to the rectifying property of the p-n junction. Note also the use of
completely different scales for the forward and backward voltage regime.
The total electrical current (electrons + holes) is thus (we do not repeat the
argument for the holes)
¡
¢
= − 1
(9.29)
where is the sum of the generation electrical currents. This relation is found
to be in good agreement with experimental data in germanium.
The p-n junction is only one of the numerous "solid-state" devices that are
found nowadays in almost any apparatus such as radio, television, computers, etc. It is,
however, a nice example that demonstrates some of the basic phenomena taking place
in the class of semiconducting materials.
9.3.3
Photovoltaic cells
If light shines on a pn-junction, electrons can be excited from the valence to the conduction band, provided that . This is equivalent to an increase of the generation
current. The equivalent circuit diagram is shown in Fig. 9.32.
From the diagram, = +
or
¢
¡
= − = − 1 −
(9.30)
178
CHAPTER 9
jlight
jp/n
current
source
j
p/n
junction
j
Figure 9.32: Equivalent cicuit diagram for a photovoltaic (PV) cell. The current source
respresents the light-induced current. The resistor represents the load for the PV-cell.
where is the current in the load, that is: the output current of the photovoltaic (PV) cell. This IV-behavior is shown in Fig. 9.33
circuit voltage is found from eq 9.30 with = 0, giving 0 =
¢
¡ The open
− 1 − and hence
¶
µ
+1
(9.31)
=
log
while the current flowing at short-circuit is = − (from Eq. 9.30 with
= 0). The maximum efficiency of a PV cell is limited by a number of factors:
1. photons with are not used: 23% of sun input is wasted
2. of photons with only an amount is used exciting the electron across
the gap. The rest, 30% of sun input is wasted.
3. Voltage loss:
Energy of a created electron
Energy needed to create an electron
' 065
4. Recombination of holes and electrons: 90% left
5. Reflection on front surface: at best 96 % left
Hence the total efficiency is about ' 047 × 065 × 09 × 096 ' 26%.
We now discuss a few of these point in more detail.
179
CHAPTER 9
-3
2.0x10
-3
no illumination
illumination
Current (A)
1.0x10
0.0
-3
-1.0x10
-3
-2.0x10
-1.0
-0.5
0.0
0.5
Voltage (V)
1.0
Figure 9.33: IV-characteristics for a PV cell with and without illumination.
Fill factor
The power ∗ = is an overestimate of the power that can be delivered by the
PV cells, since one cannot have and at the same conditions. The ratio between
the maximum power delivered by the cell and ∗ is called the ’fill factor’ . The
maximum power obtainable from the IV-curves discussed can be calculated as follows.
If the voltage across the cell is then from eq. 9.30 its power is given by
£
¡
¢¤
= − = − − 1
(9.32)
the maximum power can be found from
which yields
¢¤ª
¡
© £
=
− − 1
=0
or defining
¢¢
¡
¡
− − 1 − = 0
:=
180
(9.33)
(9.34)
(9.35)
CHAPTER 9
the voltage at which maximum power occurs follows from
( − ( − 1)) − = 0
this trancendental equation has the solution:
¶
µ
1
( + ) − 1
= LambertW
(9.36)
(9.37)
which, unfortunately does not yield a possibility to calculate in an insightful way the
fill factor
¢¤
£
¡
− − 1
=
=
(9.38)
∗
it turns out that in practice ' 09
Power from the sun used
Not all energy from the sun is used: photons with cannot excite an electron
across the gap and are thus wasted. For photons with only an amount is
used exciting the electron across the gap. We now calculate the limits to efficiency this
poses. According to eq. 3.5:
() =
which, using =
=
(9.39)
2 ( )3 2
3 2 − 1
(9.40)
can be written as
() =
with =
2
()
2
−1
we thus find for the maximum efficiency of a solar cell
R∞
R ∞ 2
()
( ) = R ∞
= R ∞ 3−1
()
0
0 −1
using some mathematics no to be discussed here, one can derive that
P∞ − ³ 3 22 2 ´
R ∞ 2
+ 2 + 2
=1
( ) = R ∞ 3−1 =
4
15
0 −1
(9.41)
(9.42)
which is shown graphically in Fig. 9.34.
From the figure we obtain a maximum efficiency for = 227 which at room
temperature corresponds to = = 227 × 86 × 10−5 eV K−1 × 5800 K = 1
181
CHAPTER 9
x
0.4
0.3
0.2
0.1
0
1
2
x
3
4
5
x
Figure 9.34: Efficiency () as a function of =
132 3 eV. The efficiency can thus never be higher than 45% since that is the fraction of
sunlight that can be converted to energy of excited electrons.
There is a way, however, to increase the amount of sunlight captured. One
can use a stack of solar cells that each capture part of the incident radiation, see Fig.
9.35.
Efficiencies of solar cells obtained the laboratory are shown in Fig. 9.36.
182
CHAPTER 9
Figure 9.35: Example of a multi-junction PV cell. The top layer captures radiation above
1.86 eV, the middle captures of the remainder the radiation above 1.4 eV and the bottom cell
captures of the remainder the radiation above 0.65 eV.
Figure 9.36: Best efficiencies of various research grade PV cells.
183
Chapter 10
Final Remarks
The text above was prepared initially by R. Griessen.
The sections on climate and Earth’s heat balance are using much material
from the excellent book “Environmental Physics” by Boeker and Van Grondelle as well
as various websites.
The sections on Basic Quantum Mechanics are using much material from the
excellent book “Non classical physics” by Randy Harris. It is modified so as to be
compatible with the level and context of this course.
The sections on the Basic Physics for Thermal Energy has to a large extent
been inspired by the book of Andrews and Jelley and some sections of the book of
Ohanian and Markert on Physics for Engineers and Scientists.
A number of sections has been updated using the excellent book of Aldo Vieira
da Rosa.
This material is, however, significantly modified so as to be compatible with
the level and context of this introductory course.
184