Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
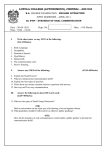
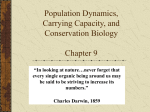
Journal of Theoretical Biology 277 (2011) 99–110 Contents lists available at ScienceDirect Journal of Theoretical Biology journal homepage: www.elsevier.com/locate/yjtbi How does adaptive consumer movement affect population dynamics in consumer–resource metacommunities with homogeneous patches? Peter A. Abrams n, Lasse Ruokolainen 1 Department of Ecology and Evolutionary Biology, University of Toronto, 25 Harbord St. Toronto, ON, Canada M5S 3G5 a r t i c l e i n f o abstract Article history: Received 29 October 2010 Received in revised form 20 February 2011 Accepted 22 February 2011 Available online 1 March 2011 This article uses simple models to explore the impact of adaptive movement by consumers on the population dynamics of a consumer–resource metacommunity consisting of two identical patches. Consumer–resource interactions within a patch are described by the Rosenzweig–MacArthur predator– prey model, and these dynamics are assumed to be cyclic in the absence of movement. The per capita movement rate from one patch to the other is an increasing function of the difference between the per capita birth minus death rate in the destination patch and that in the currently occupied patch. Several variations on this model are considered. Results show that adaptive movement frequently creates antiphase cycles in the two patches; these suppress the predator–prey cycle and lead to low temporal variation of the total population sizes of both species. Paradoxically, even when movement is very sensitive to the fitness difference between patches, perfect synchrony of patches is often much less likely than in comparable systems with random movement. Under these circumstances adaptive movement of consumers often generates differences in the average properties of the two patches. In addition, mean global densities and responses to global perturbations often differ greatly from similar systems with no movement or random movement. & 2011 Elsevier Ltd. All rights reserved. Keywords: Dispersal Metacommunity Predator–prey system Synchrony Stability 1. Introduction The question posed by the title is important because most natural consumer–resource interactions occur in spatially subdivided ecological systems (metacommunities) connected by the dispersal of individuals. While movement behavior is likely to be adaptive (Bowler and Benton, 2005), relatively little is known about the effects of adaptive movement on the dynamics of metacommunities. Habitat selection models have usually assumed that individuals moving towards better habitat patches will achieve a stable ‘ideal free’ distribution (Fretwell and Lucas, 1970), in which their fitness is equal across all occupied habitats (e.g., Křivan, 1997; Morris, 2003). If consumer–resource interactions within a patch are structurally identical across patches, equality of consumer fitness implies that resource densities are also equal across patches. This means that if the populations in the patches fluctuate, they must fluctuate in synchrony. However, some of the few studies that have explicitly modeled adaptive movement in sets of interacting species have found that ideal free distributions are often not necessarily attained, even when patches are equivalent in all parameter values (Schwinning and Rosenzweig, 1990; Bernstein et al., 1999; Abrams et al., 2007; n Corresponding author. E-mail address: [email protected] (P.A. Abrams). 1 Current address: University of Helsinki, Viikinkaari 1, P.O. Box 68, 00014 Helsinki, Finland. 0022-5193/$ - see front matter & 2011 Elsevier Ltd. All rights reserved. doi:10.1016/j.jtbi.2011.02.019 Abrams, 2007). Other types of non-diffusive movement have been shown to affect stability differently than random movement in simple systems with interacting species (Huang and Diekmann, 2001; Amarasekare, 2008). The present article is a step towards a more systematic understanding of how adaptive movement affects dynamics and distributions of individuals in metacommunities. Most work on metacommunities (e.g., all but one chapter in Holyoak et al. (2005)) has assumed that movement consists of random dispersal. Although random movement is often thought to synchronize fluctuations across patches, this is not always true, even in very simple metacommunities consisting of two patches and two species (Jansen, 2001) or in single-species models with cycles driven by discrete density-dependent dynamics (Gyllenberg et al., 1993; Hastings, 1993). In metacommunity systems with three or more interacting species, small numbers of patches, and endogenously driven population cycles within a patch, it is even more likely that asynchronous dynamics will arise from random movement between patches (Koelle and Vandermeer, 2005; Wilson and Abrams, 2005). Nevertheless, for the simple case of two similar patches, each containing a consumer–resource (predator–prey) pair, most population growth parameters and movement rates imply that random movement synchronizes the fluctuations in different patches (Jansen and de Roos, 2000; Jansen, 2001; Goldwyn and Hastings, 2008; Vasseur and Fox, 2009). However, Jansen (2001) noted that antisynchronized cycles are possible for some parameter values in this case. The fact that consumer movement towards a patch with more 100 P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 resource should reduce the difference in resource densities might suggest that synchronization would be more likely with adaptive than with random movement. This was found by Ruxton and Rohani (1998) in a study of fitness-dependent movement within a discrete time single species metapopulation model; they concluded that such movement was more likely to stabilize and synchronize dynamics than was random movement. They also found that fitness-dependent movement generally simplified fluctuations when it did not produce point stability; chaotic dynamics and complex cycles were usually converted to simple cycles. The work we describe here does not support either the intuition or the earlier results from discrete models. Defining ‘fitness’ and ‘adaptive’ can be problematic, particularly in the context of movement. However, for cost free movement of unstructured populations, whose dynamics are represented by ordinary differential equations, an individual that is always located in the patch that confers the largest per capita birth minus death rate will outcompete all others. ‘Adaptive’ movement in the models considered here means that the per capita movement rate towards the patch currently characterized by the larger per capita birth minus death rate is higher than the movement in the reverse direction. Although a few previous models of metacommunities have assumed this type of movement, most have considered scenarios more complicated than just consumer movement in a two-patch consumer resource system. In some, both consumers and resources move adaptively (Abrams, 2007); others involve systems with very many patches (Armsworth and Roughgarden, 2008), or systems in which the biological community has more than two species (Abrams, 2007; Amarasekare, 2007, 2008, 2009; Křivan et al., 2008). These studies have shown that in specific cases, adaptive movement in a set of interacting species can produce dynamics that differ greatly from the dynamics arising via random movement and may not always equalize fitness of the moving species across patches. Understanding the generality of these findings requires further studies to determine how adaptive movement alters the dynamics of the simplest ecological communities. The present study will analyze several differential equation models of population dynamics in two identical patches, each containing the same consumer and the resource species. The resource is assumed to be immobile, while the consumer moves adaptively between patches. We concentrate on cases in which the consumer– resource system within an isolated patch would undergo limit cycle dynamics. This assumption of cyclic dynamics is appropriate because movement in general is an adaptation to changing conditions. The other population dynamical assumptions mirror those of much of the previous work on random movement in coupled 2-patch consumer– resource systems (Jansen, 1995, 2001; Goldwyn and Hastings, 2008, 2009). The purpose of the analyses is to determine how consumer movement affects the variation of the populations of both species, their synchrony across patches, and how closely the consumers approach an ideal free distribution. Our results show that moving towards the patch with more resource often produces anti-synchrony, in which patch dynamics are 1801 out of phase, and the variability in total density of each species is greatly reduced. A variety of other outcomes are possible, and many parameter sets can have two or more alternative attractors. We compare these results to those for similar systems with random movement, and examine how adaptive movement changes the response of the entire system to global environmental variables that affect both patches in the same way. Similar questions for systems with non-equivalent patches are considered elsewhere (Ruokolainen et al., submitted for publication). 2. The primary model The following consumer–resource (predator–prey) model is the familiar Rosenzweig-MacArthur (1963) model with the addition of fitness-dependent Abrams (2000, 2007): consumer dRi CRi Ni ¼ Ri ðrkRi Þ dt 1 þ ChRi dNi bCRi ¼ Ni d mNi exp lðWi Wj Þ dt 1 þ ChRi þmNj exp lðWj Wi Þ bCRi d i, j ¼ 1,2, where Wi ¼ 1 þChRi movement as in ð1a; bÞ These equations describe resource (1a) and consumer (1b) population growth rate in patch i, where Ri and Ni are resource and consumer densities, respectively, in patch i, and Wi is consumer fitness (instantaneous per capita birth minus death) in patch i. In the absence of the consumer, resources have logistic growth. The parameterization of the logistic used here separates the per capita resource growth rate into a maximum per capita growth rate r and a per capita reduction in that rate of k (Rueffler et al., 2006). Under this parameterization, the equilibrium resource density in the absence of consumption is r/k. Consumption of resources is given by a Holling type II functional response with an attack rate C and handling time h. Consumed resources are converted to additional consumers (numbers or biomass) with an efficiency of b. The parameter d defines the (constant) per capita mortality of the consumer. The form of the movement function assumes that a consumer individual has the knowledge of resource densities in both patches. Information about conditions in the other patch may be obtained by cues that may be detected at a distance (e.g., diffusing chemicals) or by shortduration non-foraging visits. Eq. (1b) implies that a baseline per capita movement rate m applies when consumer fitness (i.e., per capita growth rate W) is equal in the two patches. This is modified by an exponential function of the difference in fitness between the patches. A larger value of the fitness sensitivity (l) makes the movement rate increase more rapidly with the fitness difference between patches. A larger l means that the consumer moves into a more-rewarding patch at a greater rate and moves into a lessrewarding patch at a lower rate; l ¼0 implies random movement. Alternative forms for both the movement function and population dynamics are considered in Appendix B, which is summarized in Section 3.6. Here we consider movements that occur on a behavioral time scale, which is assumed to be more rapid than the population dynamical time scale. As a result, in choosing parameter values, we require that the maximum per capita movement rate (which occurs when Ri ¼r/k and Rj ¼0; i.e., m exp[bC(r/k)/(1þCh(r/k))]) exceeds the maximum per capita population growth rate within a patch (i.e., bC(r/k)/(1þCh(r/k)) d). The ratio of these two quantities is referred to as the ‘movement ratio’ (MR). We assume a low value of the baseline rate m, reflecting the idea that ‘adaptive’ implies low rates of movement to poorer quality patches. The analysis examines a wide range of the fitness sensitivity parameter l. The minimum l considered in each case is one that implies MR ¼1, although most behavioral movement is likely to have MR b1. The maximum l considered in all cases represents a MR of at least 106. Many of these maximum movement rates may be too large to be realistic in most biological systems. However, the large differences between resource densities required to produce near-maximal movement do not occur except during transient dynamics for some initial conditions. The realized movement rates and their effects are discussed for the example in Fig. 1C and D. Appendix B discusses several alternative movement functions, including one with an upper limit to the movement rate. The population dynamic parameters are constrained by the assumption that consumer and resource populations in a single P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 101 Fig. 1. Population dynamics for three different fitness sensitivity parameters for Eq. (1) with parameters values, b¼ 0.25; C¼r ¼k ¼1; h ¼ 3; m ¼0.0005; d¼ 0.02. For panels A through C the left side gives resource densities and the right side gives consumer densities (solid line is patch 1 and short dashed line is patch 2; the long dashed line on the right is the average of the two consumer populations). Panel D is based on a short time span from panel C; the left side displays the fitness difference, W1 W2, and the right side gives the corresponding fraction of consumers located in patch 1. isolated patch exhibit limit cycle dynamics. This requires that d Chrk o b hðChr þ kÞ ð2Þ For cycles to exist for some values of b and d, it is necessary that Chr4k. We are interested in examining the impact of movement for different types of population cycles. It is possible to reduce the number of parameters in a single-patch model to three by rescaling variables (e.g., Gurney and Nisbet, 1998). This scaling and numerical analysis (e.g., Abrams and Roth, 1994; Abrams et al., 1998; Abrams and Holt, 2002) has shown that the primary determinants of cycle shape and amplitude are: (i) the value of Chr/k, which gives the ratio of handling to search time for a consumer when the resource is at its equilibrium density; (ii) the relative speeds of consumer and resource dynamics, which can be varied by proportional changes in both b and d; and (iii) the distance of a stability-determining parameter (mortality, d, is the parameter used here) from its stability threshold value (inequality (2)), which determines the period and amplitude of cycles. We study the impact of adaptive movement on dynamics for a range of values of each of these composite parameters. Numerical methods are outlined in Appendix A. 3. Results We begin with a heuristic treatment of how consumer movement might affect resource dynamics. This paragraph also 102 P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 summarizes some of the basic features of the simulation results, which are detailed subsequently. All of the simulations assume parameters that produce limit cycle dynamics in a single isolated patch. If a single patch is stable, neither random nor adaptive movement produces cycles in a two-patch system. The movement function implies that little directional movement occurs when the fitness difference is small. In these circumstances, detecting a difference is difficult and, even if the difference is assessed correctly, the reward from moving is small. Slow movement with a small fitness difference implies a time lag between when the identity of the best patch changes and when any significant fraction of the consumer population has relocated. If the lag in moving is sufficiently long, it may drive cycles, and may interact in complex ways with consumer–resource cycles that are generated within one or both patches. Decreasing the baseline movement rate m increases the effective lag because m is the approximate per capita movement rate when the patches are similar in resource density. Lags can produce cycles that are 1801 out-of-phase in the two patches; this is one of the natural modes of oscillation of coupled oscillators. These anti-phase cycles suppress large amplitude consumer–resource cycles because consumer individuals do not stay in a patch for long enough to depress the resource to very low density. Thus, only small amplitude fluctuations occur in total consumer population size. Larger amplitude consumer–resource cycles at the global scale usually re-emerge when the fitness sensitivity parameter l becomes large enough; however, the lag inherent in the adaptive movement model can still prevent perfect synchrony, and usually results in the system frequently being far from an ideal free distribution at many points in time. For some parameter sets, a sufficiently large sensitivity l does result in perfect synchrony; such synchrony occurs for a wider range of other parameter values when the baseline movement rate m is relatively large, since this reduces the time required for many individuals to shift to a patch that has recently become better. Many parameter sets imply the existence of two or more alternative attractors for a wide range of fitness sensitivities. species; these fluctuations have high but imperfect correlation between patches, as shown in Fig. 1C (l ¼350). Fig. 1C shows that some asynchrony persists in spite of relatively rapid movement towards the higher fitness patch. This is due to the significant lag in consumer population shift when both patches have very low (but different) resource densities or very high, but different resource densities. In both cases, the absolute difference in fitness can be quite small. The lag is illustrated in Fig. 1D, which shows the fitness difference between patches (scaled to the maximum possible fitness difference) and the consumer distribution for 30 time units of Fig. 1C, beginning at a time with nearly equal populations of both species across the two patches. Note that a significant redistribution of consumers is not visible until time 7681, although the fitness difference between patches exceeds 5% of the maximum possible difference 4.76 time units earlier. An almost even distribution of consumers across patches shifts to one having fewer than 1% of individuals in patch 1 between t¼7685 and 7691. Although MR4107 for the parameters in Fig. 1C, the maximum per capita movement rate (approximately 2.5) that occurs on the attractor is only about 40 times larger than the maximum per capita growth rate within a patch (and is many orders of magnitude less than the theoretical maximum movement rate). If l is increased to 1000 in this example (MR¼1.64 1025), perfect synchrony is still not observed, and the maximum movement rate on the attractor is still less than 100-fold larger than the maximum per capita growth rate within a patch. Fig. 2 shows the coefficient of variation in global densities of each species and the correlation coefficient between patches for both species for the range of l values shown in Fig. 1. As expected, high correlations between patches are accompanied by an 3.1. A reference example Here we consider a system having intermediate values of the population dynamic parameters. The parameter set is: {r ¼1; k¼1; C ¼1; h ¼3; b¼0.25; d ¼0.02; m ¼0.0005}. The value of d/b is slightly less than 1/2 the stability threshold value given by Eq. (2). The initial analysis examines how different values of the fitness sensitivity parameter (l) affect the dynamics. The lowest sensitivity considered is l ¼70, which produces a movement ratio (MR) of approximately one. Dynamics were investigated for a regular array of l-values up to l ¼350 (Fig. 1C; MR ¼3.7 107), and also for a few larger values up to l ¼ 1000 (MR¼1.64 1025). Alternative attractors were not observed for any value of l within this range. There are simple anti-synchronized cycles in the two patches, like those illustrated in Fig. 1A for relatively low movement rates (roughly 70 o l o125; MR roughly between 1 and 29). Over this range there is very little variation in total consumer density, and variation decreases as l increases. Fig. 1B illustrates resource and consumer dynamics for l just above this zone of asynchrony (l ¼130), where a longer period, larger amplitude global consumer–resource cycle that is more similar to the singlepatch cycle is beginning to emerge. (The period of the cycle in total consumer population size in this case is very close to that in a single isolated patch.) The variation in total consumer density begins to increase with l at this point. High fitness sensitivities (roughly l 4150) are characterized by irregular longer-period cycles in the total populations of both Fig. 2. (A) Coefficients of variation (panel A) and between-patch correlation coefficients (panel B) as a function of fitness sensitivity, for the populations of both species in the system illustrated in Fig. 1. P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 103 3.2. Proximity to the stability threshold Fig. 3 illustrates the change in the coefficient of variation (CV) of consumer density as a function of the fitness sensitivity parameter for mortality rates that are one-half (Fig. 3A) and twice (Fig. 3B) of those in Figs. 1 and 2. The mortality rate in Fig. 3B is only 4% less than the value at which the equilibrium becomes stable. In both of the cases considered in Fig. 3, alternative attractors exist for a wide range of l-values, so the observed CV depends on initial densities. The lower line in both figures reflects anti-synchronized dynamics similar to those shown in the top panels of Fig. 1. For this attractor, the CV of consumer densities decreases as l increases because both the period and amplitude of the back-and-forth cycles of consumers decrease. The attractor corresponding to upper line in Fig. 3A has complex dynamics with a positive temporal correlation between the population sizes of a given species in the two patches. Fitness sensitivities greater than the largest shown in Fig. 3A continue to have positively correlated, but asynchronous fluctuations in the two patches, with no strong trend in the CV, even for l double the maximum value shown in the figure. The upper line in Fig. 3B represents two alternative attractors in which one of the two patches has more variable populations of the two species than does the other. Because the patches are identical, symmetry implies that there must be an alternative ‘mirror image’ (MI) attractor for which the identities of the higher and lower variability patch are reversed. One of these two for l ¼200 is illustrated in Fig. 4B. The qualitative form of dynamics in Fig. 3B changes when l exceeds Fig. 3. Coefficients of variation of consumer density in systems that are similar to those illustrated in Fig. 1 and 2 except that d ¼ 0.01 in panel A, and d ¼0.04 for panel B. The two lines in each case reflect alternative attractors, with the bottom line representing a case of anti-synchrony, similar to that illustrated in the top panels of Fig. 1. increased coefficient of variation (CV) in total abundance of each species (lower stability). The anti-synchrony at low l is reflected in large negative correlation coefficients of populations in different patches and in the greatly reduced global variation in total density, particularly at the consumer level. The coefficients of variation of consumer and resource densities change very little for values of l larger than those shown; all are slightly less than the CVs for a perfectly synchronized system (0.349 and 1.359 for consumer and resource, respectively). Thus, very high l values produce stability and synchrony measures close to those of a system with random movement, although the population trajectories within a patch usually differ considerably. The qualitative change in dynamics with increase in fitness sensitivity illustrated by Figs. 1 and 2 is the one most commonly observed in simulations of Eq. (1) using low baseline movement rates (m). However, different population dynamics parameters in some cases changed these patterns. We next explore the impact of changing three population growth parameters that alter the three important determinants of cycle form listed in the previous section. We alter d in the system as shown in Figs. 1 and 2 so that it is either closer to or further from the stability threshold, resulting in smaller or larger population fluctuations. We change b and d proportionally to examine the impact of the relative speed of consumer and resource dynamics. We explore smaller and larger handling times to examine the impact of the maximum saturation of the consumer’s functional response. Fig. 4. (A) Resource densities and (B) consumer densities; both for the system used in Fig. 3B (d ¼0.04) when l ¼ 200. The solid line denotes a population in patch 1, the short dashed line is for patch 2, and the long-dashed line in panel B is the mean consumer population 104 P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 290 (MR¼1.65 106). At this point the lower (anti-synchronized) attractor looses stability, and the two MI attractors represented by the upper line in Fig. 3B coalesce into a single attractor with both populations undergoing identical synchronized population cycles in each patch; this persists for larger l. Simulations over a range of l were carried out for numerous other values of the death rate d with the remaining parameters identical to those in Fig. 1. Patterns observed for this set of simulations were: (1) anti-synchronized attractors with very low variation in total densities occurred for a significant range of low to intermediate l for all death rates except those that were extremely close to the stability threshold; (2) alternative attractors occurred for the widest range of l for high and low mortality rates within the unstable range; (3) the maximum l for which a low-variability anti-synchronized attractor existed was also the greatest at relatively high and low death rates (up to l ¼290 for d ¼0.04 and l ¼330 for d ¼0.005); (4) high enough fitness sensitivities l always led to dynamics with high positive correlation in the resource densities between patches; and (5) perfect synchrony was only observed at very large movement ratios, or when the consumer death rate was very close to the stability threshold. 3.3. Relative speed of consumer and resource population dynamics The conversion efficiency parameter used in the preceding sections (b ¼0.25) implies that the maximum per capita growth rate of the consumer is roughly one-twentieth that of the resource. We investigated values of b ranging from 0.01 to 10, with d values corresponding to the same percentage of the stability threshold as in Figs. 1, and 3A and B. All other parameters were identical to the values shared by these figures. These changes do not alter the equilibrium points, but do change the nature of population fluctuations. Systems with b40.25 in most cases have the same sequence of changes in qualitative dynamics as a function of l. However, more rapid consumer dynamics means: (1) a wider range of movement ratios (but often not a wider range of l) produces anti-synchrony; (2) a smaller range of MRs are characterized by alternative attractors; and (3) fewer parameter sets with reasonable values of MR produce perfect synchrony. In general, slower population dynamics reduces the range of MRs characterized by anti-synchrony. In fact with b¼0.01 and d¼0.0016 (4% below the stability threshold), perfectly synchronized dynamics occur for all l for which MR 41. When consumer dynamics are slower, the death rate, d, must be further from its stability threshold value (implying larger amplitude cycles in an isolated patch) for anti-phase cycles to occur over some range of l values. Slow population dynamics can also change the simple anti-synchrony seen in the previous sections to anti-phase complex cycles; this is shown in Fig. 5A for b ¼0.1, l ¼116, and d 4% below the stability threshold. Larger values of l in this case produce smaller negative correlations with higher variance in consumer density, although the patches are still antisynchronized. Fig. 5B shows the dynamics for the same system when l ¼400 (MR¼1224); this has high positive correlations between patches in the densities of each species although the dynamics in the two patches are still phase shifted by 1801. Perfect synchrony is not achieved until approximately l ¼870 (MR¼1.55 108). Systems having b ¼0.1 with death rates farther below the stability threshold exhibit simple anti-synchronized cycles like those shown in the top panel of Fig. 1 for low-tomoderate movement ratios, and complex cycles with positively correlated densities for larger MRs. There is often a range of l values producing alternative attractors, and perfect synchrony is often not observed for realistic MRs. 3.4. Handling time We present results for two of the handling times we examined: a relatively large value (h¼10) and a relatively small value (h ¼1.5). In these and other cases, we ran simulations across a Fig. 5. Left column: Resource densities, Right column: Consumer densities (A) l ¼ 116 and (B) l ¼ 400. The solid line represents patch 1 and the short dashed line represents patch 2; the long dashed line for consumers is the average consumer density. P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 105 Fig. 6. (A) Consumer (dashed) and resource (solid) CVs (B) Between patch correlations of consumers (dashed); resources (solid), (C) N1 (dashed); N2 (solid) for l ¼ 240 and (D) N1 (dashed); N2 (solid) for l ¼ 500. wide range of movement sensitivities for systems that were at different distances from the stability threshold, beginning with d approximately 4% below the stability threshold to match the Fig. 3B example. The fitness sensitivity and other parameters corresponded to those in Fig. 1. With high handling time, h¼10, and d¼0.0196 (4% below the stability threshold d), there were anti-synchronized cycles for low fitness sensitivities and positively correlated cycles for higher values. Fig. 6A and B shows the resulting coefficients of variation of total population size and between-patch correlations as a function of l. We did not find any parameters with alternative synchronized and anti-synchronized cycles. However, there were many cases in which there were alternative mirror-image pairs of asymmetrical cycles. Two examples of the latter are illustrated in panels C and D of the figure. Perfect synchrony was not an attractor until l exceeded a threshold between 1100 and 1200 (MR41010). The transition to positive between patch correlations of the consumer occurs at approximately l ¼300 (MR¼146). The range of l values producing anti-synchronized cycles expands as d is lowered. Alternative attractors (other than mirror image pairs) were rare when h was relatively large. Smaller handling times generally favor synchrony. A handling time 41 is needed for cyclic dynamics to exist for any d, given the other parameters assumed here. If h¼1.5 (given C¼r ¼k¼ 1), d ¼0.032 represents a value 4% below the stability threshold; in this case, perfectly synchronized cycles were the only dynamics observed for all l with MR41, given m¼0.0005. The more common pattern of anti-synchrony followed by positively correlated cycles as l increases emerged for lower death rates; there is also often a range where both types of attractors exist as alternatives. This occurs, for example when d¼0.016; anti-synchrony is the only attractor for l up to 125, and exists as one of the two alternative attractors for 125o l o145 (1597 oMRo 11,802). Perfect synchrony, when it is possible, usually requires unrealistic movement ratios. 3.5. Summary of results for low baseline movement in Eq. (1) The above analysis has basically explored one-dimensional lines through the space of potential population dynamic parameters, and many additional parameter combinations are possible. We have analyzed systems with various combinations of the features explored above, such as different speeds of consumer dynamics in systems with larger handling time. Different values of C, r, and k were simulated, but under similar circumstances; these produced dynamics qualitatively similar to those described above. The important features are: (1) anti-synchronized (approximately 1801 out of phase) simple cycles in the two patches with a relatively short period and low variation in total density were the most common dynamic pattern at low-tomoderate fitness sensitivities; there were spatially correlated but imperfectly synchronized predator–prey cycles at high fitness sensitivity; (2) alternative attractors were common at intermediate fitness sensitivities; (3) perfect synchrony was not a common outcome, but was observed in several different circumstances, either at very high fitness sensitivities, very slow consumer dynamics, or in systems that were either close to the stability threshold or had a value of Chr/k close to the limiting value of one. 3.6. Summary of alternative movement parameters and functions Appendix B considers the impact on dynamics of different baseline movement rates, m, and of several alternative movement or population dynamics functions. It shows that sufficiently large baseline movement rates make perfect synchrony the dominant form of dynamics by effectively homogenizing the system. The main alternative movement functions considered are: (1) ones in which the per capita movement rate approaches an asymptote at relatively large fitness differences (‘‘constrained rate’’ movement); (2) ones in which movement rates decrease to zero when 106 P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 the other patch confers equal or lower fitness (‘‘no-error’’ movement); and (3) ones in which only fitness in the current patch influences movement (‘‘local fitness’’ movement). These alternatives produce some qualitative differences in the patterns of dynamics with different movements. Constrained rate movement is more likely to produce anti-synchrony, and no-error movement is less likely to produce either anti-synchrony or perfect synchrony than is the movement function in Eq. (1). Alternative attractors under the no-error model are usually mirror image attractors with positive between-patch density correlations. Local movement rules produce alternative anti-synchronized and perfectly synchronized attractors in many cases, but are more likely to produce only perfectly synchronized dynamics when there was a relatively high rate of movement from a patch having a per capita growth rate of zero. Appendix B should be consulted for more details on these and other models. 3.7. Effects of random and adaptive movement on system-level properties Random movement produces perfectly synchronized dynamics for all of the parameter combinations reported above for Eq. (1), when the per capita random movement rate is given by the baseline m¼0.0005 value of the adaptive function; synchrony is also produced by all other m values up to m¼0.5 (higher values were not examined because m¼0.5 made the consumer distribution nearly uniform across patches, regardless of the resource levels). Thus, for consumer–resource systems like those considered here, asynchrony of patches under adaptive movement is much more likely than under random movement. The different dynamics under random and adaptive movement lead to differences in system-level properties, such as the response to enrichment or harvesting of either the resource or the consumer. Both harvesting and enrichment of the resource can be modeled by changes in the maximum resource per capita growth rate, r. Increasing r (enrichment) increases the rate of resource dynamics relative to those of the consumer, increases instability within a patch, and increases the maximum saturation level of the consumer’s functional response. Thus, the pattern of change in dynamics with change in r combines the three types of parameter variation considered in the main analysis of Eq. (1). A full treatment of the impacts of adaptive movement on response to fertilization is beyond the scope of this article. However, we will present one example of the impact of increase in r using the system illustrated in Figs. 3B and 4. Under random movement, the two patches become synchronized, and consumer variability increases with r due to increase in amplitude of the underlying predator–prey cycles (Fig. 7A). Fig. 7B assumes adaptive movement based on Eq. (1) with l ¼ 100; here, the two patches have negative density correlations over the same range of r illustrated in Fig. 7A. The negative correlation produces a much lower coefficient of variation in N. (Note that the y-axis of Fig. 7B spans only 1/4 the range of Fig. 7A.) The CV of consumer density is proportionally more sensitive to r under adaptive than under random movement, and its direction of change with r is no longer a monotonic increase. In Fig. 7B, the low part of the curve between r¼1 and 1.9 consists of simple anti-synchronized cycles where the predator–prey oscillation is suppressed. Anti-synchronized cycles return at r¼3, but have a much longer period, and the CV then increases rapidly with further increases in r. The lower variation in the system with adaptive movement also implies that the temporal mean consumer density is greater with adaptive than with random consumer movement. At r ¼1, there is only a 1% difference in density between randomly and adaptively moving consumers, but for 3 or o5, an adaptively moving consumer achieves a mean population density Fig. 7. Coefficient of variation of total consumer population size vs. resource intrinsic growth rate, r, for the population dynamics model used in Figs. 3B and 4. (A) Random movement with m¼0.0005 (any rate producing synchronized patches yields the same result). (B) Adaptive movement according to Eq. (1) with m¼0.0005 and l ¼100. Note that the y-axis covers a much smaller range in panel B approximately 50% greater than that of a randomly moving consumer. This also means that harvesting the resource in a 2-patch metapopulation with a large initial r-value will produce a much greater absolute decrease in the consumer population in a system with adaptive than with random consumer movement. The difference between random and adaptive populations is even larger for mean resource densities, with random movement leading to an approximate 2.4-fold greater mean resource density when r ¼5, but less than a 1% difference when r ¼1. In this same example, if the initial r is 5, harvesting consumers (increasing the death rate from 0.04 to slightly less than the stability threshold of d¼0.073) produces a paradoxical increase in consumer density under both types of movement (the ‘‘hydra effect’’; Abrams, 2009). There is a much greater increase (and a much greater proportional increase) in consumer density over most of this range of mortalities when movement is adaptive than when it is random. There are likely to be many other system-level responses that differ under random and adaptive movement. 4. Discussion It has long been known that adaptive movement can alter metapopulation dynamics, even when only a single species is involved. However, these differences have only been noted in single-species models when patches differ from one another (Hastings, 1982; Holt, 1985). The common occurrence of various P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 types of asynchronous dynamics in 2-species systems with homogeneous patches demonstrated here shows that the impacts of adaptive movement on population dynamics are likely to be greater and more varied in systems with interacting species than in single-species systems. Asynchronous dynamics have been found in several lab studies of simple metacommunities having similar patches (e.g., Holyoak and Lawler, 1996; Janssen et al., 1997), but the cause has not been clearly identified. Modeling studies (e.g., Abrams et al., 2007; Křivan et al., 2008) have shown that instability occurs in some metacommunity models of two competing species, and Abrams (2007) has shown that it is also possible in 3-level predator–prey–resource systems that incorporate adaptive movement of both predator and prey. However, the present work suggests that spatial heterogeneity in fitness also arises from the simplest homogeneous-patch consumer–resource (predator–prey) systems having adaptive consumer movement. In fact, inequality between patches is far more likely to arise in such a homogenous patch system when consumers actively move towards the patch having the higher resource density than it is for systems in which movement is random. Adaptive habitat choice may create rather than remove spatial differences in consumer fitness. Huang and Diekmann (2001) have shown that, if predators do not move when handling prey, fluctuations are never significantly decreased relative to the synchronous system. This type of movement could be considered adaptive movement, as high prey densities will lead to more time spent handling. It suggests that much more needs to be done to understand the range of effects of different movement rules. In the models we have discussed, the asynchrony due to adaptive movement in most cases reduces the global instability (coefficient of variation of global population size) for both species in the consumer–resource system, relative to a similar system in which there is a low rate of random movement. When there are anti-synchronized patch dynamics, the CV of total consumer population size may be two or more orders of magnitude less than the CV in a single isolated patch or in a two-patch system having random movement between patches. This stabilization occurs primarily because the dynamics suppress the normal consumer–resource cycle. Analogous types of anti-synchronized dynamics occur in three-patch systems, and also occur in two-patch models with heterogeneous patches (Ruokolainen et al., submitted for publication). Even when dynamics are not perfectly out of phase, most cases of asynchronous dynamics produce a lower CV in total consumer density than what is observed in a single patch or more patches coupled by random movement. Asynchronous dynamics do not occur in cases with a high baseline movement rate, m, which decreases the effective time lag between the point when the identity of the more-rewarding patch changes, and when a significant number of consumers have moved. Models of switching behavior of consumers between two different resources within a single patch (Abrams, 1999; Abrams and Matsuda 2003, 2004) have shown the same key role of time lags in preventing synchronization. It is difficult to generalize about the impact of habitat selection on system-wide dynamics. Very rapid and accurate movement (high fitness sensitivity l) usually leads to positive between-patch density correlations and high variation in total population sizes of both species. However this is generally the result of a transition from anti-synchrony to positively correlated cycles over a narrow range of l. Higher l actually leads to lower CVs in the antisynchronous range, and leads to irregular changes within the positively correlated range. Depending on the initial l, a higher value can move the system into or out of a region with alternative attractors. In a stochastic environment, switching between attractors could make total densities most variable within the 107 intermediate range of l having alternative attractors, but this requires additional analysis. Adaptive movement often produces systems having very different global properties than similar systems in which movement is random. We have provided an example in which the relative stability of systems with adaptive movement translated into much greater densities of the consumer and a much greater sensitivity of the consumer to either harvesting or enrichment of the resource. Abrams et al. (submitted for publication) show that patch-specific harvesting of consumers in 2-patch consumer– resource systems has different impacts depending on whether movement is adaptive or random. It is likely that responses of community dynamics to environmental changes or species additions will differ significantly in most multispecies metacommunities having adaptive rather than random movement by any major subset of species. Much evidence suggests that movement is broadly adaptive in many species and systems, but there is generally insufficient evidence to determine functional forms. The results presented here show that the dynamics of a consumer–resource system can differ significantly with changes in the form and/or parameter values of the function describing adaptive movement. We hope that our demonstration that the details of movement decisions can greatly alter system dynamics will spur more empirical work on the dynamics of adaptive movement in systems with two or more species in two or more patches. The work presented above needs to be extended in several directions. Systems with more patches and more species are obviously of interest. We have not examined transient dynamics here. Doing so would be of interest because Goldwyn and Hastings (2008) show that long-term transients involving asynchronous dynamics often exist in 2-patch consumer–resource systems with random movement. We have concentrated on systems in which only the top trophic level moves. Koelle and Vandermeer (2005) and Abrams (2007), respectively, found strong effects of movement by bottom- and mid-level species on stability in 3-trophic-level models. Investigating larger food webs and models with explicit and/or continuous space is likely to uncover additional differences between the community-level effects of random and adaptive movement. Acknowledgments This work was supported by a Strategic Project Grant and a Discovery Grant from the Natural Sciences and Engineering Research Council of Canada. We thank the reviewers, B.J. Shuter, A.J. Golubski, and P. Amarasekare for comments on earlier versions of this work. Appendix A. Numerical methods Most of the numerical integration was carried out using the NDSolve command in Mathematica 7.0.1 (Wolfram Research, 2009), with an Accuracy Goal setting of Infinity. In some cases the ability to integrate successfully depended on initial values of the variables. A selection of cases were checked using a FORTRAN routine, RADAU5 (Hairer and Wanner, 1996). The standard run was for 8000 time units and average densities were obtained for the last 4000 time units. These durations were lengthened as needed when there were long-lasting transient dynamics or when the dynamics underwent long-period cycles or chaos. For very long period cycles, the period was determined and average densities were obtained for exactly one period. Simulations investigating dynamics as a function of the fitness sensitivity 108 P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 parameter, l, generally used an interval of 5 for successive values of the parameter; a wide range of initial densities was used for l values corresponding to MR ¼1 and for a very large MR, and attractors were followed as l was either increased or decreased by small intervals using a slightly perturbed set of final values for the previous l as initial densities for the next l. Appendix B. Different movement parameters and functions Different baseline movement, m, in Eq. (1) The standard baseline per capita movement rate, m¼0.0005, means that movement between two patches with equal resource density is almost two orders of magnitude smaller than the per capita death rates. Many systems are likely to have more frequent movement under these conditions. If baseline movement is increased 100-fold, m ¼0.05, the majority of parameter sets described in text only have a single attractor with perfect synchrony. However, this movement rate is greater than the maximum per capita growth rate within a patch for the parameters used in Figs. 1–3, and it produces similar numbers of consumers in both patches, even when one patch is a sink. If m has the intermediate value of 0.005, the occurrence of perfect synchrony is increased (relative to 0.0005), but anti-synchrony and various forms of asynchrony are still reasonably common. When m ¼0.005 and other parameters are as in Figs. 1 and 2, the transition from anti-synchrony to positively correlated cycling occurs at a much lower movement ratio (15.4 rather than 138.7). Perfect synchrony is achieved at a lower l and MR than in Figs. 1 and 2, but it still requires a l close to 400 (MRE109). The synchronizing influence of a larger m has a larger impact when the cyclic tendency within a patch is weaker. Thus, if d is increased to 0.04 (with m¼0.005 and other parameters as in Fig. 3B), a perfect synchrony is observed for all l values representing MR41. Lowering m ten-fold to 0.00005 increases the occurrence of anti-synchrony for parameters near the stability threshold, but in general has relatively small effects on the types of dynamics and the MR values at which they are observed. Increase in m means more movement under all conditions. Random movement can also be increased by adding a random movement term without changing the value of m in the adaptive movement function of Eq. (1). This increases random movement equally for all magnitudes of fitness difference. It has less of a synchronizing impact than does increasing m for parameters producing the same movement rate at fitness equality (i.e., m0 ¼uþ m, where m0 is the increased value of the baseline movement parameter). Such independent random movement reduces the occurrence of anti-synchrony considerably, but does not greatly increase the occurrence of perfect synchrony. For the system considered in Figs. 3B and 4 (d ¼0.04), adding random movement at a rate u ¼0.0045 (so that m0 ¼0.005) produces complex positively correlated cycles with quasi-periodicity for most of the parameter range producing anti-synchronized cycles in the absence of the random movement. Perfect synchrony occurs at a somewhat lower l than in the system lacking random movement (l ¼ 210 rather than 290). This contrasts with perfect synchrony at all l when m is simply raised to 0.005 in the adaptive movement function. Nevertheless, some synchronizing effect of added random movement was seen across all of the parameter sets we explored. Constrained rate movement The movement formula in Eq. (1b) can produce an extremely high rate of movement when both l and the fitness difference between patches are large. There is likely to be a maximum rate of transition between patches. This can be accommodated by changing the rate of movement from patch i to j from the one discussed above, to mExp½lðWj Wi Þ , 1þ amExp½lðWj Wi Þ ðB:1Þ where a is a small (5 1)positive constant. The movement rate approaches a maximum of 1/a as l(Wj–Wi) becomes large, and is referred to as a ‘‘constrained rate’’ movement function. When the fitness difference is small, this has little impact on the movement described in the previous model, as the exponential term in the denominator will be small relative to 1. The previous model represents a special case of Eq. (B.1) in which a ¼0. Even quite small values of a greatly increase the range of other parameters that produce anti-synchronized dynamics. If the example in Fig. 1 is changed to incorporate movement function (B.1) with a ¼0.01, the maximum movement rate is 100 (which is still much greater than the maximum per capita birth minus death rate of 0.0425). However, this changes the dynamics by greatly expanding the range of movement sensitivities that permit anti-synchronized dynamics (up to l 41350), and creates a wide range of parameters (very roughly 400 o l o1400) where alternative attractors exist, the anti-synchronized attractor, and a single or two mirror image attractors, each with highly positively correlated cycles in the two patches. Larger values of m again tend to produce synchronous cycles, while larger a favors anti-synchronized cycles. This is in part due to the lower absolute movement rates implied by a nonzero a. No-error movement Here, we assume that movement to a poorer quality patch is impossible. Cressman et al. (2004) investigated some of the properties of such ‘no-error’ rules. A continuous function having this property also implies no movement between patches conferring identical consumer fitness. A function with these properties is ( ) mNi ðexpðlðWj Wi ÞÞ1Þ if Wj 4 Wi Mij ¼ ðB:2Þ 0 if Wi Z Wj The dynamics produced for the reference example in Fig. 2 (d ¼0.02) are very similar in terms of CVs and between-patch correlations, although the transition to higher variance and correlation occurs at slightly lower values of l and the MR. When d¼0.04, movement function (B.2) also produces a set of dynamics that is very similar to the comparable system illustrated in Figs. 3B and 4 in the text as l is increased. The main difference is that the transition to perfect synchrony requires a somewhat higher MR in this no-error model. Many other potential movement functions share (with Eq. (B.2)) the property that mistakes (movements that reduce fitness) never occur. The exponential function in Eq. (B.2) can be replaced by any increasing, accelerating function of (Wj–Wi) to produce adaptive movement having the desired property that movement rates increase faster than linearly with the fitness benefit of moving. An alternative in which the fitness difference is raised to a power Z2 was discussed briefly in the appendix of Abrams (2007). The movement from patch j to patch i is then mNi(Wi–Wj)z (where zZ2) if Wi oWi, and is zero if the inequality is reversed. This produces the same range of dynamics as Eq. (B.2), although the MR values producing anti-synchronized dynamics are somewhat smaller, particularly when z¼2. Perfect synchrony can occur, but it often requires higher movement ratios than in the model discussed in the text. Slightly asymmetrical mirror P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 image attractors with positive correlations commonly occur at moderately high MR. Local fitness movement Another alternative movement function is based on the assumption that only local conditions can be detected by the consumer. This requires eliminating the Wj from the formula for the movement of consumers in patch i in Eq. (1b), producing a function similar to the one used by Ives (1992). In this case, it is reasonable to assume a relatively low movement rate when conditions are good enough that births balance deaths, but movement should go up rapidly when the resource becomes scarce. The maximum movement rate out of patch i occurs when fitness (instantaneous per capita growth rate) is equal to di. In calculating a movement ratio, the movement rate corresponding to this case is compared to the maximum per capita growth rate (that occurs when R¼r/k) within a patch. This alternative model produces some changes in the dynamics of the system. It is clear that when both patches have little resource, there will be frequent movement between patches, which is not the case when m is small in Eq. (1b). Nevertheless, anti-synchronized dynamics also occur in this system. In some systems with relatively low per capita movement rates, dynamics are still anti-synchronized (and the normal predator–prey cycle is suppressed), even at the highest movement rates that are realistic. For example, if the example in Fig. 3B is changed to eliminate the effect of the other patch on movement, an anti-synchronized attractor exists for the entire range of biologically reasonable l values (1oMRo1010). A perfectly synchronized attractor also exists for l Z190 (MRZ44). Similar alternative attractors are observed when the Fig. 3B example is changed so the consumer has slower dynamics (b¼0.1, d¼0.016); 109 again the anti-synchronized attractor exists for all l values, while perfect synchrony is an alternative for MRZ75. Parameters further from the stability threshold are characterized by the loss of the antisynchronous attractor at smaller l. Systems with a larger handling time often have an asynchronous attractor with high positive correlations between patches as an alternative to the anti-synchronized attractor. In all systems, anti-synchrony becomes rare or absent when the movement constant, m, is large enough. However, the general features of the attractors and how they change with parameters are roughly similar to the model with movement based on between-patch comparisons. Fig. B1 presents some examples of dynamics for a system similar to that in Fig. 3B, but with a slightly lower death rate. Here the period of the anti-synchronize cycle is much shorter than for the comparable examples based on Eq. (1b), and the corresponding variation in total density is much smaller. Alternative synchronized and anti-synchronized attractors exist for quite a wide range of l, from approximately 150 to 490. Other variations on Eq. (1) Two-patch systems may have unusual properties because of the fact that emigrants have only one place to go. We have run a limited number of simulations of 3- and 4-patch systems. These assumed that the patch leaving decision was based on local conditions only, and examined cases in which the emigrants from a patch were divided evenly between the other patches. Parameter sets that displayed anti-synchronized dynamics in the 2-patch models often led to the equivalent (each patch 1201 out of phase with each other) in the 3-patch case. 3-patch dynamics also included cases in which two patches were perfectly Fig. B1. The dynamics of a system in which movement is based on local patch conditions only, using Eq. (1b) after removing the fitness of the unoccupied patch from the movement function. Parameters are as in Fig. 3B, except that mortality, d, is 0.035 rather than 0.04. Panel A shows the coefficient of variation for both the synchronous (top line) and the anti-synchronous (lower line) attractors across a range of l; the anti-synchronous attractor loses stability above l ¼490, while the synchronous one persists for l 4500. Panel B is an example of consumer (left hand side) and resource (right hand side) dynamics for the anti-synchronous attractor (l ¼ 125). The solid line is the population in patch 1, the short dashed line is the patch 2 population, and the long-dashed line in the consumer graph is the mean population across both patches. 110 P.A. Abrams, L. Ruokolainen / Journal of Theoretical Biology 277 (2011) 99–110 synchronized and the third was out of phase with these two. Clearly, there is more scope for alternative attractors with three patches. A final variant of the main model adds random movement by the resources. A high enough resource movement rate leads to perfectly synchronized consumer (and resource) dynamics for most parameter sets, whether or not the consumer moves adaptively or randomly. However, resource movement at low-to-moderate rates does not always eliminate the asynchronous dynamics caused by adaptive consumer movement, although it generally reduces the range of l values yielding anti-synchronous dynamics. As shown in Abrams (2007), adaptive (fitness-dependent) movement by resources usually promotes anti-synchrony in two-patch models when the predator has a saturating functional response. References Abrams, P.A., 1999. The adaptive dynamics of consumer choice. Am. Nat. 153, 83–97. Abrams, P.A., 2000. The impact of habitat selection on the heterogeneity of resources in varying environments. Ecology 81, 2902–2913. Abrams, P.A., 2007. Habitat choice in predator–prey systems; spatial instability due to interacting adaptive movements. Am. Nat. 169, 581–594. Abrams, P.A., Cressman, R., Křivan, V., 2007. The role of behavioral dynamics in determining the patch distributions of interacting species. Am. Nat. 169, 505–518. Abrams, P.A., 2009. When does greater mortality increase population size? The long history and diverse mechanisms underlying the hydra effect. Ecol. Lett. 12, 462–474. Abrams, P.A., Holt, R.D., 2002. The impact of consumer–resource cycles on the coexistence of competing consumers. Theor. Popul. Biol. 62, 281–295. Abrams, P.A., Matsuda, H., 2003. Population dynamical consequences of switching at low total prey densities. Popul. Ecol. 45, 175–185. Abrams, P.A., Holt, R.D., Roth, J.D., 1998. Shared predation when populations cycle. Ecology 79, 201–212. Abrams, P.A., Matsuda, H., 2004. Consequences of behavioral dynamics for the population dynamics of predator–prey systems with switching. Popul. Ecol. 46, 13–25. Abrams, P.A., Ruokolainen, L., Shuter, B.S., McCann, K.S. Consequences of spatially restricted mortality applied to predator–prey metacommunities. Ecology, submitted for publication. Abrams, P.A., Roth, J.D., 1994. The effects of enrichment on three-species food chains with nonlinear functional responses. Ecology 75, 1118–1130. Amarasekare, P., 2007. Spatial dynamics of communities with intrigued predation: the role of dispersal strategies. Am. Nat. 170, 819–831. Amarasekare, P., 2009. Spatial dynamics of keystone predation. J. Anim. Ecol. 77, 1306–1315. Amarasekare, P., 2008. Spatial dynamics of foodwebs. Annu. Rev. Ecol. Evolut. Syst. 39, 479–500. Armsworth, P.R., Roughgarden, J.E., 2008. The structure of clines with fitnessdependent dispersal. Am. Nat. 172, 648–657. Bowler, D.E., Benton, T.G., 2005. Causes and consequences of animal dispersal strategies: relating individual behavior to spatial dynamics. Biol. Rev. 80, 205–225. Bernstein, C., Auger, P., Poggiale, J.-C., 1999. Predator migration decisions, the ideal free distribution, and predator–prey dynamics. Am. Nat. 153, 267–281. Cressman, R., Křivan, V., Garay, J., 2004. Ideal free distributions, evolutionary games, and population dynamics in multiple-species environments. Am. Nat. 164, 473–489. Fretwell, S.D., Lucas Jr., H.L., 1970. On territorial behavior and other factors influencing habitat distribution in birds. Acta Biotheor. 19, 16–36. Rosenzweig, M.L., MacArthur, R.H., 1963. Graphical representation and stability conditions of predator–prey interactions. Am. Nat. 97, 209–223. Goldwyn, E.E., Hastings, A., 2008. When can dispersal synchronize populations? Theor. Popul. Biol. 73, 395–402. Gurney, W.S.C., Nisbet, R.M., 1998. Ecological Dynamics. Oxford University Press, Oxford, UK. Goldwyn, E.E., Hastings, A., 2009. Small heterogeneity has large effects on synchronization of ecological oscillators. Bull. Math. Biol. 71, 130–144. Hastings, A., 1982. Dynamics of a single species in a spatially-varying environment: the stabilizing role of high dispersal rates. J. Math. Biol. 16, 49–55. Ives, A.R., 1992. Continuous time models of host–parasitoid interactions. Am. Nat. 140, 1–29. Gyllenberg, M., Soderbacka, G., Ericsson, S., 1993. Does migration stabilize local population dynamics? Analysis of a discrete metapopulation model. Math. Biosci. 118, 25–49. Hastings, A., 1993A. Complex interactions between dispersal and dynamics: lessons from coupled logistic equations. Ecology 74, 1362–1372. Holyoak, M., Lawler, S., 1996. Persistence of an extinction-prone predator–prey interaction through metapopulation dynamics. Ecology 77, 1867–1879. Holt, R.D., 1985. Population dynamics in two-patch environments: some anomalous consequences of an optimal habitat distribution. Theor. Popul. Biol. 28, 181–208. Holyoak, M., Leibold, M.A., Holt, R.D. (Eds.), 2005. Metacommunities: Spatial Dynamics and Ecological Communities. University of Chicago Press, Chicago, IL. Hairer, E., Wanner, G., 1996. Solving Ordinary Differential Equations II. Stiff and Differential-Algebraic Problems. Springer, Berlin. Huang, Y., Diekmann, O., 2001. Predator migration in response to prey density: what are the consequences? J. Math. Biol. 43, 561–581. Jansen, V.A.A., 1995. Regulation of predator–prey systems through spatial interactions: a possible resolution to the paradox of enrichment. Oikos 74, 384–390. Jansen, V.A.A., de Roos, A., 2000. The role of space in reducing predator–prey cycles. In: Dieckmann, U., Law, R., Metz, J.A.J. (Eds.), The Geometry of Ecolgical Interactions: Simplifying Spatial Complexity. Cambridge University Press, Cambridge, UK, pp. 183–201. Jansen, V.A.A., 2001. The dynamics of two diffusively coupled predator–prey populations. Theor. Popul. Biol. 59, 119–131. Janssen, A., Van Gool, E., Lingeman, R., Jacas, J., Van de Klashorst, G., 1997. Metapopulation dynamics of a persisting predator prey system in the laboratory: time series analysis. Exptl. Appl. Acarol. 21, 415–430. Křivan, V., 1997. Dynamic ideal free distribution: effects of optimal patch choice on predator–prey dynamics. Am. Nat. 149, 164–178. Koelle, K., Vandermeer, J., 2005. Dispersal-induced desynchronization: from metapopulations to metacommunities. Ecol. Lett. 8, 167–175. Křivan, V., Cressman, R., Schneider, C., 2008. The ideal free distribution: a review and synthesis of the game-theoretic perspective. Theor. Popul. Biol. 73, 403–425. Morris, D.W., 2003. Toward an ecological synthesis: a case for habitat selection. Oecologia (Berlin) 136, 1–13. Rueffler, C., Egas, M., Metz, J.A.J., 2006. Predictions should be based on individuallevel traits. Am. Nat. 168, E148–E162. Ruokolainen, L., Abrams, P.A., McCann, K.S., Shuter, B.J.. Spatial coupling of heterogeneous consumer–resource systems: the effect of adaptive consumer movement on synchrony and stability. Am. Nat., submitted for publication. Ruxton, G.D., Rohani, P., 1998. Fitness-dependent dispersal in metapopulations and its consequences for persistence and synchrony. J. Anim. Ecol. 67, 530–539. Vasseur, D.A., Fox, J.W., 2009. Phase locking and environmental fluctuations generate synchrony in a predator–prey community. Nature 460, 1007–1011. Schwinning, S., Rosenzweig, M.L., 1990. Periodic oscillations in an ideal-free predator–prey distribution. Oikos 59, 85–91. Wilson, W.G., Abrams, P.A., 2005. Coexistence of cycling consumer species having localized interactions; Armstrong and McGehee in space. Am. Nat. 165, 193–205. Wolfram Research, 2009. Mathematica v.7.0.1. Champaign-Urbana, IL.