Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Inertial frame of reference wikipedia , lookup
N-body problem wikipedia , lookup
Jerk (physics) wikipedia , lookup
Hunting oscillation wikipedia , lookup
Coriolis force wikipedia , lookup
Fundamental interaction wikipedia , lookup
Seismometer wikipedia , lookup
Fictitious force wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Classical mechanics wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Centrifugal force wikipedia , lookup
Equations of motion wikipedia , lookup
Mass versus weight wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Classical central-force problem wikipedia , lookup
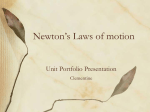
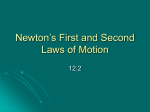
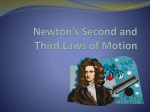
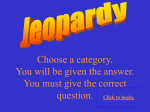
BLACKBOARD COURSE PHYSICS 1.2. PHYS 1433 4. DYNAMICS: NEWTON’S LAWS OF MOTION. We are ready to make next step now: to transfer from Kinematics to Dynamics. Dynamics is the branch of Mechanics that relates the geometrical characteristics of motion with the causes of motion. The causes of the motion are forces. The Force in Mechanics is considered as any kind of a push or a pull on an object. It is a vector quantity. We designate it by the capital letter F. Several forces may simultaneously act on the same object. Using the vector addition, we can find total or net force. Fnet = Σ F = F1+ F2 + F3 + ……….. (4.1) Where Greek letter Σ means sum. 4.1 Newton’s First Law of Motion. The Newton’s Laws are the core of dynamics. The First Law is about situation when no net force acting on an object. From ancient times, it was supposed that object eventually comes to rest, so the rest is the natural state of each object. Galileo revised this concept. He introduced the concept of the frictional force and stated that when there is no this force, the motion with the constant velocity will be also natural state for each object. This concept incorporated into First Newton’s Law of Motion: A body acted on by no net force moves with constant velocity (which may be zero). Constant velocity means zero acceleration. Finally the 1st Newton’s Law can be analytically written as following: ………………If Σ F = 0, then v = const, a = 0……………………(4.2) It is convenient to write first equation in components: Σ Fx = 0 Σ Fy = 0 Σ Fz = 0 (4.2a) The tendency of a body to keep moving once it is in motion (or to be at rest if it was initially at rest) results from a property that is called inertia. Because of this the 1st Newton’s Law of motion sometimes is called the Law 1 of Inertia. The reference frames in which the law of inertia is valid is called an Inertial Reference Frames. Along with a force, a very important in dynamics is the physical quantity called Mass. Newton treated mass as quantity of matter. Mass actually can be considered as the measure of the inertia of an object. The greater mass an object has, the greater force is needed to set this object in motion or to stop it. For example, a huge truck much more difficult to stop than a small compact car. Mass is scalar, the unit to measure mass in the SI system is kilogram. 4.2 Newton’s Second Law of Motion. We can perform the simple experiments applying to object different forces. We will see that greater the force, greater the acceleration of an object. If we apply the same force to the objects with different masses, we will deduce that greater the mass of an object, smaller the acceleration. Based on the experiment observation The Newton’s Second Law of Motion can be formulated as following. The acceleration of an object is directly proportional to the net force acting on it, and is inversely proportional to its mass. The direction of the acceleration is in the direction of the net force acting on the object. The 2nd Law can be written as following: a = Σ F/m (4.3) or in more wide used form: Σ F = ma (4.4) From the left side of the Eq. (4.4) we have a vector addition. To find it we use the method of components (see Chapter 3); therefore it is convenient to write Eq. (4.4) in components. For 3D case we will have: Σ Fx = max Σ Fy = may Σ Fz = maz (4.5) Using dimensional analysis we can determine from Eq. (4.4) the SI system unit for force and introduce physical quantity Force to full extent. It vector quantity. SI unit of force is called after Isaac Newton newton: 1 newton = 1 N = 1 (kg m)/(s²). 2 4.3. Newton’s Third Law of Motion. Forces are causes of motion, but where do forces come from? They come from the interaction between objects. Forces always come in pairs. Force acting on an object is always the result of its interaction with another object. Newton supposed that two interacting objects must be treated on an equal basis and formulates his Newton’s Third Law of motion as following. The forces with two objects interact with each other are equal in magnitudes and opposite in directions. These two forces act on different objects. If object 1 exerts a force on object 2 (an “action” F1→2), then object 2 exerts a force on object 1 (a “reaction” F2→1). In this case the 3rd Law can be written as F1→2 = -- F2→1 (4.6) Sometimes this law is interpreted as “to every action there is an equal and opposite reaction”. But we should remember that two forces described in this law act on different objects. 4.4. Forces in Mechanics. Analysis of the Newton’s Laws of motion show, that if we know forces acting on an object and its mass (dynamical physical quantities), we, in principle, can solve corresponding equations and find acceleration of the object (kinematical characteristic). Therefore Newton’s Laws of motion relate causes of motion and resulting motion. But, before we try to use this approach, we need to specify forces that usually can be applied to the objects in mechanics. Force of Gravity. When object is in free fall (undergoes force of gravity) near the surface of the Earth, it is moving with the constant acceleration – acceleration due to gravity g. Using the 2nd Newton’s Law of Motion, we can write for the magnitude of the gravitational force following expression: 3 FG = mg (4.7) Direction of the force of gravity is always down. The force of gravity often is called Weight. In every day life the concepts of weight and mass are often to get confused. For example, there is serious problem in many countries, which is called “how to lose weight”. In physics, solution of the problem “how to lose weight” very simple. Take a look on Eq. (4.7); person can lose the weight by coming to the places where g is smaller. In New York City g = 9.803 m/s², but in the vicinity of the equator g = 9.780 m/s², on the Moon surface g six times smaller than on the Earth surface. Coming to the places with smaller g, person really will lose weight. But there will be no satisfaction. Therefore the right title of this complicated problem should be “how to lose mass”. You should remember, that weight is the force of gravity, vector quantity directed in space and measured in newtons. Mass, from other hand, is scalar, amount of matter in an object measured in kilograms. Considering forces acting on an object, remember that if object has mass, there is the gravitational force acting on it at the earth surface. Normal Force. When can observe a lot of objects at rest that are situated on some surfaces. We know that gravitational force always acting on the objects. Why these are objects are at rest but not in the free fall? We can deduce that some other forces balance their weights. These forces result from reaction forces of surfaces in contact. The normal (perpendicular to the surface) component of these contact forces is called normal force FN. There is no formula that allows us to calculate normal force. It could be found by solving whole problem. Direction of the normal force is always perpendicular to the surface on which an object is situated. It is directed up only if the surface is horizontal (it is not so, for example, on the incline). Tension Force. When a cable attached to the object pulls object, we should take into account the Tension Force FT. Direction of this force -- along the cable. There is no special formula for the tension force. It could be found by solving whole problem. The cables in the problems suppose to be with zero mass and unstretchable. It means that we do not need additional force to accelerate the cable or to stretch it. The cable just transfers force along itself. We will also suppose that when a cable connects objects they are moving with the same 4 magnitude of acceleration. If there are pulleys in a problem, we will suppose that they only change the direction of the force, but not its magnitude. When two objects are attached to each other by cable we should take into account Newton’s 3rd Law of Motion. The forces with which these objects interact through cable are equal in magnitude and directed in opposite directions along the cable. Friction Force. When object is moving along the solid surface of other object, the atoms of these two surfaces come close enough and interatomic interaction between two surfaces appears. The tangent component of these contact forces is called Friction Force Ffr. This force could be much smaller than other forces in the problem in question. In this case, you will be informed by conditions of problem that surface is frictionless. In many problems, surface could not be treated as frictionless. The magnitude of the friction force directly proportional to the normal force and depends on the material and quality of a surface that characterized by material constant – the coefficient of friction. If an object is moving, the friction is called kinetic friction. In this case, the magnitude of the friction force can be found from the following equation: Ffr = µ k FN (4.8) Where µk is the coefficient of kinetic friction. When object is at rest, the friction is called the static friction. The magnitude of the friction force in this case can be estimated from the relationship Ffr ≤ µ s FN (4.9) Where µs is the coefficient of static friction. Usually µ s > µ k. Both of them are dimensionless because actually they can be treated as a ratio of two forces.. The direction of the friction force –always opposite with the respect to direction of motion (in the case of the kinetic friction) or with respect of the possible motion (in the case of the static friction). 4.5. Solving Problems Related to the Newton’s Laws of Motion. 1. Draw a sketch of the situation as a whole. 5 Take a look on the formulas of the Newton’s Laws of Motion (Eq. (4.2) – Eq. (4.6)). We deal with forces. They are vectors directed in space. We need to perform vector addition of vectors directed in different directions of the space. Because of this, it is very important to draw a diagram showing all the forces acting on each object involved (to get right side of the 1st or 2nd Newton’s laws). This diagram is the specific feature of the solving process and it has its own title. It is called Free—body Diagram or Force Diagram. In this diagram, object should be shown free from its environment. This is why the diagram is called freebody diagram. 2. Draw a free-body diagram for only one object (at a time). Show all forces acting on this body. Do not show any forces that this body exerts on other objects. Why? Take a look on the left side of the formulas of the 1st and 2nd Laws. Only forces acting on it determine the motion of an object. There is no any mention of the forces that object in question applies to other objects. 3. If several objects are involved, draw a free—body diagram for each object. 4. To find a net force, we need to perform a vector addition. We will use the method of components (see the Chapter 3). Therefore we need to introduce coordinate system (again for each object separately). You are absolutely free to choose the direction of a coordinate axes. Usually the most convenient choice is the choice in which one of the axes is directed along of the direction of an object’s motion. 5. Resolve all forces acting on an object into components using formulas (3.2) – (3.3). 6. Try to figure out from the problem’s conditions, what Newton’s Law of Motion should you use. If it is written in the conditions that object is moving with constant velocity or it is at rest, you should apply the 1st Law (use formulas (4.2a)). If you are given acceleration or you are asked to find it, you should apply 2nd Law (use formulas (4.5)). 7. Write corresponding Newton’s Law equations in components for an object in question. Specify left side of equations (forces acting on the object with their signs – positive if the component is in the positive direction of coordinate axis, otherwise – negative). Any material object experiences the 6 gravity. Formula for the force of gravity is (4.7), direction – always down. If an object situated on the surface, there is normal force, direction – perpendicular to the surface. If there is a cable (string, rope and so on) by which object is pulled, there is tension force directed along the cable. If an object is moving along the surface and there is no mention in conditions that surface is frictionless, if you are given coefficient of friction or I are asked to find it, there is the friction force acting upon an object. Formula for the friction force is given by Eq. (4.8) (if the object at rest you can use for estimation Eq. (4.9)). 8. Writing left side of equations, remember that if there is no motion along considered coordinate axis, the component of acceleration along this axis is zero. 9. Because friction force is determined by the normal force (see Eq. (4.8)). It is useful to diminish the number of unknowns as following. If the X-axis is chosen as a direction of motion and right side of Y-component of equation of motion, we can use this component to express normal forces through other forces and substitute this expression into definition of friction force (Eq. (4.8)) and then put it into X-component of equation of motion. As a result we will diminish the number of equations describing the motion of an object in question. 10. If there are several bodies in the problem, repeat all steps described above for each object separately. If cables connect these objects, apply 3rd Newton’s Law for tension forces acting on the connected objects. Remember, that if objects connected by cables, they are moving with the same magnitude of acceleration. 11. Bring all equations for all objects together and solve this system of equations simultaneously for unknowns. Actually in this course we will consider usually one or two objects in the system. Some examples of typical problems are given below. EXAMPLE 4.1. Apparent weight of an object in an elevator. The real weight Wr of an object is the gravitational force that acts on it Wr = mg. The apparent weight of the object Wa is the force object exerts on whatever it rests on. Think about apparent weight as the reading on a scale an object is placed on (see Fig. 4-1 on which the object is shown situated on 7 the scale and both of them are inside elevator). It is supposed that scale is situated on the horizontal surface. In this case, Wa = FN. The object’s mass is m = 100 kg. Find the apparent weight of this object when: (a) elevator is moving up with constant velocity v = 1 m/s.; (b) elevator is moving up with the acceleration a = 1 m/s²; (c) elevator is moving down with the acceleration a = 1 m/s²; (d) elevator is moving down with the acceleration a = g = 9.8 m/s². There are only two forces acting on the object: gravity force directed down and normal force numerically equal to the apparent weight directed up. They are shown on the Free-Body Diagrams for the cases (a) – (d) in Fig. 4.1. The object is moving along vertical direction. Therefore it is convenient to choose Y-axis of coordinate system directed up. There are no forces directed along X-axis. Because of this we can analyze only Y-component of the Newton’s second law of motion. In each case we need to find normal force FN that numerically equal to the apparent weight. It could be equal to the real weight (case (a)), greater than the real weight (case (b)), or smaller than real weight (case(c)). In the case (d), apparent weight is zero and object is in the state of weightless. This situation is used to train astronauts. The plane is moving along the special trajectory for which all objects inside this plane experience the state of weightless for some small interval of time. 8 Fig.4-1. Example 4.1. Apparent weight of an object in an elevator. 9 EXAMPLE 4.2. A 5.0-kg block is at rest on a horizontal surface. The coefficient of friction between the block and the surface is µk = 0.30. Constant horizontal force F then acts upon this block and increases its velocity to 10.0 m/s in 5.0 s. (a) Draw the free-body diagram showing all forces acting on the block. (b) What is the acceleration of the block? (c) What is the magnitude of the force? (d) What distance covered by block during 5.0 s of motion? In this problem, we have again forces acting along vertical axis, that we again choose as Y-axis: normal force and gravity force. But there are now forces acting along horizontal that is convenient to choose as X-axis: external force acting in positive direction of X-axis and frictional force always acting in the direction opposite in the direction of a motion. FreeBody Diagram is shown in the Fig.4.2. External force acting on the object is constant; therefore the acceleration of the object must be also constant. Acceleration of the object now can be found by using equation for the motion of an object with constant acceleration and information given in conditions. We will use now both X- and Y-components of the Newton’s second law of motion. It looks as we have two equations and three unknowns: F, Ff, and FN. But Ff, and FN are related by definition of the frictional force, which we can add to the system of equations. From Y-component of the second law we can find FN and substitute it into definition of frictional force. Substituting it into X-component of Newton’s second law we will get one equation with one unknown. This allowed us to determine unknown external force F. 10 Fig. 4-2. Example 4.2. EXAMPLE 4.3. Consider the mechanical system shown in Figure, where the block m1 = 5.00 kg sliding on a flat frictionless surface is connected by a string over a pulley to the hanging block m2 = 8.00 kg. The system is released from the rest. (a) Draw the free-body diagram for each block. (b) Calculate the acceleration of the system. (c) Find the tension in the string. 11 There are two objects: object # 1 is situated at the surface; object # 2 is hanging. They are connected through the cable. Besides gravity forces and normal force, the tension force FT appears in this case. Important new point is that we need to prepare now separately two free-body diagrams. Each object should be considered separately (see Fig. 4.3). It is convenient to choose positive directions of the coordinate axes along directions of motions: X-axis -- to the right for object # 1; Y-axis -- down for the object # 2. There is no motion along Y-axis for the object # 1, and along X-axis for the object # 2. Correspondingly the components of the acceleration vectors along these axes equal zero for object # 1 and object # 2 respectively. There is no influence on motion of the object # 1 from forces acting on it along Yaxis. Therefore there is no necessity to consider Y-component of the Newton’s second law for object # 1. Similar situation is for the Xcomponent of the second law for object # 2. We can reduce number of unknowns taking into account that because of cable connection, two objects are moving with the same acceleration: a1 =a2 = a, and because of the Newton’s third law of motion FT1 = FT2 = FT. Equating FT1 to FT2, we will get one equation with one unknown. Solving it, we will find the acceleration of the system of objects a, and then the tension force FT. 12 Fig. 4.3. Example 4.3. EXAMPLE 4.4. Suppose now that, in an Example 4.3, the coefficient of friction between the block m1 and the surface is µk = 0.400. (a) Draw the free-body diagram for each block. (b) Calculate the acceleration of the system. (c) Find the tension in the string. 13 Besides gravity forces, normal force, and the tension forces, frictional force Ff appears in this example. Frictional force depends on the normal force FN. To decrease numbers of unknown, we can to determine normal force from the Y-component of the Newton’s second Law of motion for the object # 1 and put it into definition of the frictional force. Then the succession of actions is the same as in the Example 4.3. It is useful to analyze solution by comparing it with the Example 4.3. The comparison show that introduction of the frictional force decreases the acceleration of the system. It looks reasonable. 14 Fig. 4.4. Example 4.4. 5. STATIC EQUILIBRIUM. We studied two basic branches of the mechanics – the kinematics and dynamics. Now we will begin to study the third basic branch of the mechanics that is called Statics. Statics is the determination of the forces within a structure at equilibrium. A body at rest (or in an uniform motion) is 15 said to be in equilibrium. These branch of the Mechanics is very important for applications in civil engineering, architecture, medicine and so on. 5.1. First Condition of equilibrium. The object will be in equilibrium with respect of the translational motion when net force acting on it is zero. Actually at rest velocity of object is zero, so the acceleration is also zero. Using the second Newton’s Law of motion, we can get the First Condition of Equilibrium. ΣF=0 (5-1) We will use (5-1) in components. In 2 dimensional problems, the first condition of equilibrium can be written as following: Σ Fx = 0 (5-1a) Σ Fy = 0 (5-1b) These relationships are necessary condition for an object to be in equilibrium, however they are not always a sufficient condition. Really, consider two forces with equal magnitudes and opposite directions, but directed not along the same straight line. The first condition of equilibrium will be satisfied in this case. Nevertheless the object will not be at rest and will have a tendency to rotate. Therefore we need additional condition of equilibrium with respect to a rotation. To introduce additional condition we need to introduce concept of torque. 5.2. Torque. It is understandable that to make object rotating about an axis of rotation we need a force. But it is also important not only the magnitude of this force but also the perpendicular distance from the axis of rotation to the line along which a force is acting (line of action of a force). This perpendicular is called lever arm. The rotating effect of a force also depends on the angle between the lever arm and a force. We will take all these circumstances into account if we introduced new physical quantity Torque that plays the same role for rotational motion as force plays for translational motion. The magnitude of the torque can be determined as following 16 τ= r F sinθ (5-2) Where r is the distance from the axis of rotation to the point where force F applied; F is the magnitude of the applied force; θ is the angle between the line of action of the force and a line connecting axis of rotation and the point at which the force is applied (see Fig. 5.1). Usually we will use the following sign convention: a positive sign is assigned to torques that act to rotate the object counterclockwise, and a negative sign to torques that act to rotate the object clockwise. From relationship (5-2) we can deduce that unit of torque in SI system is m N. There is no special name for this unit. 5.3. The second condition of equilibrium. Now we can formulate the Second Condition of Equilibrium: The sum of the torques acting on a body must be zero. In the 2D problems, we usually suppose that axis of rotation is directed along Z-axis and all forces are lying in the plane XOY. The all set of equations describing conditions of equilibrium can be written for this case as following: Σ Fx = 0 (5.3a) Σ Fy = 0 (5.3b) Στ=0 (5.3c) Sum of X—components and sum of Y-component of all forces acting on an object and sum of torques of all these forces applied in the XOY plane must be equal zero. There are some specifics related to the Second condition of equilibrium. Torque of the force can be calculated with respect to different axis of rotation (real or virtual). So, with respect to which axis of rotation net torque must be zero? The answer is: in equilibrium, net torque must be zero with respect to any axis of rotation. Therefore, solving problems, we can choose any axis of rotation that makes our calculation easier. For example, we can choose as axis of rotation point at which unknown force is applied. In this case, the torque of this force will be zero. The number of unknown in the set of equations will be decreased by this way. It does not matter is the chosen axis real or virtual. 17 6. CIRCULAR MOTION; GRAVITATION. Now we will apply the Newton’s law of motion to the consideration of the circular motion of the objects. The circular motion is widely represented in the technological base of our civilization. It occurs also in the nature. Very important example is the motion of planets, including our own planet Earth, and satellites motion around the Earth and other planets. All these types of motion could be treated as the simple type of circular motion – the uniform circular motion. 6.1. Kinematics of the Uniform Circular Motion. The Uniform Circular Motion is the motion of an object in a circle with constant speed. Suppose that the radius of the circle is r and the speed of an object is v, then we can introduced some useful physical quantities that characterized the uniform circular motion. We introduce Period of rotation T. Period is the time of one rotation. It can be determined according to its definition. During time interval T, object, moving with the speed v, cover distance equals to circumference length 2 π r. Therefore the period can be determined from the following equation: T = (2 π r)/v (6.1) Unit in which we measure period is second (s). We also introduce physical quantity Frequency f. Frequency is the number of rotations per unit time. In SI system the unit of frequency is called hertz (after great German physicist H. Hertz). 1 hertz = 1 Hz = 1/s. The period and frequency are related by the equation: f = 1/T (6.2) Now we will consider the basic physical quantity of the uniform circular motion starting with velocity. We know that the speed of this motion is constant, but what about velocity? Speed is only the magnitude of velocity. Speed is the scalar, but velocity is vector quantity, it has the magnitude (speed) and direction. Magnitude is always constant but direction of velocity all time changing. Change in velocity causes appearance of the acceleration. It does not matter what is changing during the motion magnitude of the velocity (speed) or direction of the velocity or both of them. Anyway the acceleration during uniform circular motion will not be zero. It could be 18 shown that acceleration during the uniform circular motion always is directed to the center of the rotation. This acceleration is called Centripetal Acceleration are (from seeking the center in Latin). The formula for the magnitude of the centripetal acceleration can be written as following: aR = v²/r (6.3) It is not surprising that the aR depends on v and r. The greater the speed v, the faster the velocity changes direction; the larger the radius , the slowly the velocity changes direction. 6.2. Dynamics of the Uniform Circular Motion. Now we will apply the Newton’s Laws of motion for the consideration of the uniform circular motion. According to the 2nd law, when nonzero net force is applied appears an acceleration directed in the same direction as the net force. From this statement, we can deduce that if there is acceleration, there is a nonzero net force that causes this acceleration appearance. This force is directed in the same direction as the acceleration. Therefore if there is the centripetal acceleration directed to the center of rotation, the net force causes this acceleration directed to the center of rotation. This force is called centripetal force. According to the 2nd Newton’s law of motion we can write: ΣFR = m aR (6.4) Combining (6.4) and (6.3), we finally get expression of the 2nd Newton’s law of motion for the Uniform Circular Motion. ΣFR = m v²/r (6.5) Centripetal force is not the new type force of nature. Actually different forces can that are directed to the center of rotation and keep an object on the circular path (the orbit) during the circular motion can play the role of the centripetal force. It could be the tension force, frictional force, component of the normal force, gravity force. Below we will consider examples of different forces that keep the object on its path around the center and participate in the appearance of the centripetal force. Solving corresponding problems, you should remember that problems are the problems in which Newton’s laws of motion should be solved. Therefore, we will use the same strategy that we used before in the Chapter 4: creation of the free body diagram for an object; writing the corresponding Newton’s laws of motion 19 (in the case of the uniform circular motion this is the equation (6.5)); solution of these equations and so on. EXAMPLE 6.1. Revolving ball (tension force participates in the appearance of the centripetal force). A ball with the mass m = 0.300 kg on the end of a string is revolved at constant speed v = 4.00 m/s in a vertical circle with the radius R = 0.720 m. Calculate the tension in the string when the ball is (a) at the bottom of its path, (b) at the top of its path. (c) Determine the minimum speed the ball must have at the top of its arc so that the ball continues it’s moving in a circle. m = 0.300 kg v = 4.00 m/s r = 0.720 m ------------------(a) FTb -- ? (b) FTt --? (c) vmin--? 20 Fig. 6.1 Example 6.1. (a). Free-body diagram for the object at the bottom of its path is shown in the bottom of the Fig. 6.1. There two forces acting on the object: gravity force mg directed down and tension force FRB directed up. We will choose the Y-axis directed up as positive. Then we will write the Newton’s 2nd law of motion for this case: 21 Σ FR = m are FRB – mg = m v²/r FTb = m (v²/r + g) = 9.61 N (b). Free-body diagram for the object at the top of its path is shown in the top of the Fig. 6.1. There two forces acting on the object: gravity force mg directed down and tension force FTt directed down. We will choose the Y-axis directed down as positive. Then we will write the Newton’s 2nd law of motion for this case: Σ FR = m aR FTt + mg = m v²/r FTt = m ( v²/r -- g) FTt = 3.73 N (6.6) (c). The ball continues it’s moving in a circle until the string will remain taut. It will remain taut as long as there is tension force in it that is until FTt > 0. But if the tension disappears (because v is too small) the ball will fall out of its circular path. Thus, the minimum speed will occur if FTt = 0. Substituting FTt the in relationship, we will get 0 = m ( v²min/r -- g) vmin = gr = 2.66 m/s EXAMPLE 6.2. Car rounds curved part of the highway (frictional force as centripetal force). The car (m = 1000 kg) rounds the curved part of a highway with the radius 50.0 m. What should be the maximum speed at which frictional force keeps the car at the curved path (a) at the dry conditions (µs = 0.60) and (b) at the icy condition (µs = 0.25). (c). Is the result independent of the mass of the car? m = 1000 kg r = 50.0 m (a) µs = 0.60, vmaxdry ? (b) µs = 0.25, vmaxicy ? (c) Is the result independent of the m? 22 Fig. 6.2. Example 6.2. The free body diagram for this example is shown in Fig. 6.2. The following forces acting on the car are the force of gravity mg is directed down, the normal force FN exerted by the road directed up and there is horizontally directed static friction force. Car is moving along the road but the static frictional force Ffs keep the car on the track. This force is directed to the center of rotation and there is no motion in this direction. We can choose vertical direction as the positive direction of Y-axis. The direction to the center of rotation can be chosen as the positive. The Newton’s 2nd low of motion in components can be written as followings. Σ Fx = m a Σ FR = m aR - 23 Ffs = m v²max/r (6-6) Σ Fy = 0 FN -- mg = 0 FN = mg (6-7) To diminish the number of unknowns, we can add the definition of the static frictional force and get the expression for this force Ffs = µs FN = µs m g (6-8) Substituting (6-8) into (6-6) we will get m v²/r = mg. Mass is canceled and we will finally get expression for the maximal speed. _____ vmax = √ µs r g (6.9) But what actually vmax means? If the velocity of a car will be v ≤ vmax, then the car will move along the highway. If the velocity of the car will be v > vmax, then sufficient friction force cannot be applied and the car will skid. out of circular path into a more nearly straight path. Substituting correspondent values from the condition, we will get: (a) vmaxdry = 17.1 m/s. (b) vmaxicy = 11.1 m/s (c) Mass is absent in the final expression (6.9), so the vmax is the same for all cars disregarding their mass. Drive car carefully, pay attention to traffic signs specifying the maximal speed at the curved parts of the highways and take onto account weather conditions. 6.3. Gravitation. The force of gravity attracts all objects with mass on the surface of the Earth. This force causes all objects to fall with the same acceleration – acceleration due to gravity g – at the same location on the Earth. We have seen that this motion (free fall motion) was analyzed by the Galileo. He had no real explanation of this fact. Newton was also thinking about the problem of gravity and used in the analysis his laws of motion. Since falling object is moving with acceleration, there must be the force acting on it (2nd Newton’s Law). This is gravity force. This force is caused by the interaction with another object (3rd Law). The force is directed in the same direction as the acceleration of the free fall – to the center of the Earth. Newton concluded that it must be the Earth exerts the gravitational force on objects on its surface. The next step made by Newton was described in the 24 Newton’s Apple Story. This is the real event happened with Newton. He told his friend about what happened. Once upon a time, Isaac Newton was in a garden and noticed an apple drop from a tree. As a result of this observation, Newton has been struck with a sudden inspiration. He made an extremely important revolutionary conclusion. If gravity acts at the tops of trees, and even at the tops of mountains, then perhaps it acts all the way to the Moon. Construction of the Solar System. Geocentric and Heliocentric Models. Here, we should stress, that all scientist before Newton starting from Aristotle thought that terrestrial and celestial objects are governed by different laws of nature. Aristotle stated that Sun and planets are rotating around the Earth (geocentric model). The celestial objects are moving by rotation of crystal spheres. The motion of celestial objects is absolutely perfect, orbits are circular and speed of motion is constant. In this time, there was other idea in the ancient world. Aristarchus thought that the Earth is moving around the Sun. But this idea contradicted the observations of ancient scientists. If the Earth is moving around the Sun, The positions of the stars measured from the different points of orbit (for example, in the Summer and in the Winter) must be different. This phenomenon is called the Stellar Parallax. But, the measurements of star positions made by ancient scientist show no any measurable difference in the positions of the stars during different seasons. Stellar parallax does occur, but it is too small to detect with the unaided eye. (Actually the possibility to measure stellar parallax was achieved astronomers only in XIX century). For this reason, and because of the dominant influence of Aristotle ideas, Aristarchus model was not accepted. The ancient Greek scientist developed further Aristotle geocentric model (we can mention Hipparchus and especially Ptolemy). The basic aspects of a geocentric model explained most of the motions of the celestial objects by various geometric devices. The model was strong enough to survive for a long time – more than a thousand years. In new times, Copernicus introduced his heliocentric model in which Earth and other planets are rotating around the Sun. He supposed that orbits of the planets are circles and that the planets are moving along these circles with constant speed. We know now that heliocentric model is right model, however Copernicus predictions came out no better than those based on the Ptolemaic geocentric model. Why? 25 The explanations were found when German scientist Johannes Kepler processed experimental date about planetary motion of planets (especially the planet Mars) collected by Danish astronomer Tycho Brahe. Johannes Kepler derived from these data three empirical Laws. Kepler’s Laws of Planetary Motion. 1st Law. The path of each planet about the Sun is an ellipse. 2nd Law. Each planets moves so that an imaginary line drawn from the Sun to the planet sweeps out equal areas in equal periods of time. 3rd Law. The ratio of the square of the period of planet rotation around the Sun to the cube of its mean distance from the Sun is the same for all planets. We can only imagine the titanic work done by Kepler to derive these results from the raw experimental data fixing positions of the planets. It is clearly seen from these laws that orbits of planets are not circle, but ellipses (1st Law), and that planets speed of motion along their orbits is not constant (2nd Law). This explained why the prediction of Copernicus heliocentric model was not precise. Nobody could explain the Kepler’s Law of Planetary Motion. This work was done by Newton. 6.4. Newton’s Law of Universal Gravitation. When Newton came to the revolutionary idea that the motion of the celestial object – the Moon is governed by the same law s as the terrestrial objects, he decided to apply to the Moon motion his laws of motion and compare the gravitational force acting on the Moon with the gravitational force acting on the object at the surface of the Earth. According to the 2nd law the force is proportional to the acceleration. Using astronomical data, Newton calculated the centripetal acceleration of the Moon. It turned out that acceleration of the Moon is 3600 = 60² times smaller than acceleration due to gravity at the Earth surface. But the Moon is 60 times further from the center of the Earth than the object at the Earth surface. But, according to the 2nd Newton’s Law of motion, the force is proportional to the acceleration. Therefore Newton concluded that the gravitational force exerted by the Earth on any object decreases with the square of its distance r from the Earth’s center. It is understandable that the force of gravity depends not only on distance but also on the object’s mass. According to Newton’s third law, when the Earth exerts its gravitational force on the Moon, the Moon exerts an equal and opposite force on the Earth. Because of this symmetry, the magnitude of the 26 force of gravity must be proportional to both of the masses. Thus, Newton proposed the Newton’s Law of Universal Gravitation: Every particle in the universe attracts every other particle with a force that is proportional to the product of their masses and inversely proportional to the square of the distance between them. This force acts along the line joining the two particles. F = G (m1 m2) / r² (6-10) Where m1 and m2 are the masses of the two particles, r is the distance between them, and G is a universal constant unknown in the time of Newton. It must be measured experimentally and has the same numerical value for all objects in the Universe. Strictly speaking the formula (6-10) could be applied to a point-like objects. When extended objects are small compared to the distance between them (as for the Earth – Sun system), little inaccuracy results from considering them as point-like particles. But how we can apply formula (6-10) to the case when objects could not be treated as point-like objects (for example the object at the surface of the Earth)? Newton showed for two uniform spheres, relationship (6-10) gives the correct force where r is the distance between their centers. Force of gravity is comparatively small. For example, the electric force of interaction between two electron is 10^(42) times smaller than force of force of the gravitational interaction between them. In 1798, over 100 years after Newton published his law, English physicist Henry Cavendish performed fine experiment that is treated as the landmark in the experimental Physics and confirmed The Newton’s law of universal gravitation. Cavendish measured F, m1, m2, and r for two lead balls and determine the numerical value of the Universal Gravitational Constant. Its accepted value today is G = 6.67 10^(-11) (N m²)/(kg ²) (6-11) These results allowed to Cavendish to estimate the mass of the Earth. Let us consider the gravity force acting on the object with mass m at the surface of the Earth. We know that it could be written as Fg = mg. But, according to the Newton’s Law of Universal gravitation (6-10), the same force can be written as following FG = F = G (m mE) / (RE)², where mE is the mass of the Earth and RE is the radius of the Earth. Because Fg = FG, we can write 27 mg = G (m mE) / (RE)² (6-12) Mass of the object is gone, and we can derive from relationship (6-12) expression for the mass of the Earth: ME = g (RE)²/G (6-13) Cavendish used this expression, value of G and calculated the mass of the Earth. He published his results in the article with the title “I weighed the Earth”. It allows to calculate the average density of the Earth ρE = mE/VE, where VE It turned out that ρE is much greater than the density of the rock. It was the hint that there is heavy iron core at the center of the Earth. From equation (6-12) we can derive other important relationship: g = G mE / (RE)² (6-12) We can understand now the mystery faced during study of Free Fall motion. All objects are falling with the same acceleration (acceleration due to gravity) at the same point of the Earth surface. Acceleration due to gravity g on the surface of the earth has a little different value at different locations because the Earth is not a perfect sphere. The value of G can vary locally because of the presents of irregularities and rocks of different densities. Geophysicists use the precise measurement of g as part of their investigations into the structure of the Earth’s crust, and in mineral and oil exploration. The equation (6-12) can be used to determine acceleration due to gravity on different celestial objects like planets and their moons. For example, if we put in (6-12) astronomical data for the Moon, we will see that the acceleration to the gravity at the Moon surface 6 times smaller than on the Earth. Now we can understand why American astronauts were able to make so high jumps at the surface of the Moon. The Satellite Motion. We apply the Newton’s Law of Universal gravitation to the satellite motion. It could be natural satellites (for example, Earth’s natural satellite the Moon) or artificial satellite. The possibility to launch artificial satellites was discussed by Newton. If it will be launch with high speed it can orbit the 28 Earth. But what about gravity force and Free Fall? In fact, a satellite is falling (accelerating toward the Earth), but its high tangential speed keeps it on the orbit. To describe the satellite motion we will use Newton’s 2nd Law of motion. The force at the left side of the equation is the gravitation force (6-10) acting on the satellite from the Earth. For simplicity, we consider the satellite that is moving along the circular orbit with constant speed (uniform circular motion). Σ FR = m aR G (m mE) / (r)² = m v²sat/r (6-13)) Where m is the mass of the satellite and vsat is its speed, r is the radius of the orbit. From equation (6-13) we can derive equation for the satellite speed: ______ vsat = √ G mE/r (6-14) Analysis of the equation (6-14) shows that that we can not choose the radius r of the orbit and the speed of the satellite vsat independently. If we launch the satellite with the speed vsat, then the radius of the orbit r is determined. The motion of the satellite does not depend on its mass, because it does not appear in the equation (6-14). EXAMPLE 6.3. The Hubble space telescope is orbiting at a height h of 596 km above the Earth surface and has a mass 11 000 kg. Determine: (a) the speed of the Hubble space telescope; (b) the period of its revolution around the Earth. We need some astronomical data: the mass of the Earth is mE = 5.98 10^(24) kg; the radius of the Earth is RE = 6.38 10^6 m. h = 596 km = 5.96 10^5 m mE = 5.98 10^(24) kg RE = 6.38 10^6 m G = 6.67 10^(-11) (N m²)/(kg ²) ___________________________ (a) vsat ? (b) T? (a) Before using expression (6-14) we should take into account that the radius of the orbit, the height of the satellite, and the radius of the Earth are related: 29 r = h + RE Then, substituting r into (6.14) we will get ___________ vsat = √ G mE/(RE + h) = 7.56 10^3 m/s (6-15) (6-16) (b) We can use relationship (6-14) for determination the rotation period (time of one rotation) of the satellite combining (6-14) with (6.1). _____ T = (2 π r)/v = (2 π r³′²)/√ G mE = 5800 s = 97 min = 1.61 h (6-17) Gravity and Construction of the Universe. The introduction of the Law of gravitation (6.10) was not the explanation of the planetary motion yet. The Robert Hook the rival of Isaac Newton stated that he knew inverse square law for force of gravity before Newton. But Newton not only introduced the law of gravitation (6.10). He showed that this Law allows explaining Kepler’s Laws of planetary motion. To proof this he invented calculus. Therefore he was not only great physicist but also the great mathematician. (Many scientists believe that Isaac Newton was the greatest scientist ever). We could not demonstrated here how to get 1st Kepler’s Law from the Law of universal gravitation, but we will do this for 3rd Kepler’s Law. We will modify expression (6.17) for the case of the solar system. The period of rotation of the planet (natural satellite of the Sun) Tp can be found from the relationship _____ Tp = = (2 π r³′²)/√ G mS (6-18) Where mS is the mass of the Sun. T² / r³ = (4 π²) / (G mE) (6.18) At the right side of the equation (6.18) are the same for all the planets of the solar system as was predicted by 3rd Kepler’s Law of planetary motion. The Newton’s Law of Universal Gravitation explained all known at those time astronomical phenomena data. Mankind understood the construction of the universe. It was a great achievement of science. Later some discrepancy was found. The orbit of more distant from the Sun planet Uranus deviated from orbit predicted by the Newton’s Law of Universal Gravitation. The 30 English astronomer Adams and then French astronomer Leverrier explained these discrepancies by gravitational influence of unknown planet and predicted the position of this plant. German astronomer Galle really found this planet. It was called Neptune. A huge blue planet was discovered as said at the tip of the pen. It was a triumph of Newtonian mechanics. A little later, in 1865, the new astronomical data was collected that needed explanation: the orbit of the Mercury, the planet closest to the Sun, changes its position in space with time. It is extremely small but measurable change. But, there was any explanation of this phenomenon until 1916 when Albert Einstein introduced its General Theory of Relativity. In this theory, a new concept of gravity was suggested. According to Einstein, matter bends or curves space and thus controls the behavior of nearby bodies. Now we could not understand new phenomena discovered in the universe like black holes, neutron stars and so on without the General Relativity. This theory is both conceptually and mathematically difficult and far beyond the level of this course. However, it should be noted that in weak gravitational fields, Einstein’s theory reduces to Newton’s, so that everything that we have done so far, remains correct. It is only in strong gravitational fields, such as close to the Sun or other stars, that the differences become important. 31