Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Surge protector wikipedia , lookup
Television standards conversion wikipedia , lookup
Audio crossover wikipedia , lookup
Schmitt trigger wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Power electronics wikipedia , lookup
Digital electronics wikipedia , lookup
Broadcast television systems wikipedia , lookup
Oscilloscope types wikipedia , lookup
Telecommunication wikipedia , lookup
Analog television wikipedia , lookup
Oscilloscope history wikipedia , lookup
Equalization (audio) wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Current mirror wikipedia , lookup
Index of electronics articles wikipedia , lookup
RLC circuit wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Flexible electronics wikipedia , lookup
Negative-feedback amplifier wikipedia , lookup
Valve audio amplifier technical specification wikipedia , lookup
Electronic engineering wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Regenerative circuit wikipedia , lookup
Operational amplifier wikipedia , lookup
Phase-locked loop wikipedia , lookup
Rectiverter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Opto-isolator wikipedia , lookup
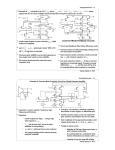
Analog Integrated Circuits Fundamental Building Blocks Basic OTA/Opamp architectures Faculty of Electronics Telecommunications and Information Technology Gabor Csipkes Bases of Electronics Department Outline definition of the OTA/opamp cascade of amplifier stages – the general opamp architecture the uncompensated Miller opamp – small signal model at low and high frequencies step response of a second order system with unity feedback the two stage opamp with Miller compensation – models and parameters sizing algorithm for the two stage Miller opamp the telescopic opamp – voltage budget, models and parameters sizing algorithm of the telescopic opamp the folded cascode opamp – small signal low and high frequency model sizing algorithm for the folded cascode opamp Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 2 The ideal opamp - definitions ideal opamp = a differential input, voltage controlled voltage source with very large open loop gain the ideal gain is frequency independent, but real gain can be modeled with a set of poles and zeros → typically low pass behavior very large input resistance and near zero output resistance opamps with strictly capacitive loads can have large output resistance → Operational Transconductance Amplifiers (OTA) often also called opamp the output may be single ended (referenced to ground) or differential single or symmetrical supply voltages Vout a V V Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 3 The opamp – a cascade of elementary stages the typical opamp architecture → a differential amplifier followed by a high gain inverting stage and a voltage follower for low output impedance the voltage follower may be missing if the load is known to be strictly capacitive frequency compensation for closed loop stability probably required (more on this later) elementary amplifier stages → subsequent V-I and I-V conversions most simple form → the two stage opamp V-I I-V I-V cascade of elementary stages V-I Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 4 The two stage or Miller opamp Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 5 The two stage opamp the small signal low frequency model with two equivalent stages no capacitive effects → low frequency or DC voltage gain each stage can be analyzed individually → Gm and Rout specific to each configuration V Gm1 g m1,2 Rout1 rDS 2 || rDS 4 Gm 2 g m 6 R r || r out 2 DS 6 DS 7 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures a0 Gm1 Rout1 Gm 2 Rout 2 a1 a2 6 The two stage opamp the small signal high frequency model → consider load and parasitic capacitances V C1 C2 CGD1,2 C3 CGS 3 CGS 4 CDB1 CDB 3 C4 CGD 4 C5 CGS 6 CDB 2 CDB 4 C C GD 6 6 C7 CL CDB 6 CDB 7 CL a(s) a0 1 sRout1C5 1 sRout 2C7 The frequency response is dominated by C5 and C7 due to the large Rout1 and Rout2 ! Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 7 The two stage opamp – with negative feedback the closed loop model of an opamp with negative feedback a( s) A( s ) 1 a( s) r The closed loop gain: a( s) a0 s s 1 1 p1 p 2 a0 p1 p 2 1 a0 r 1 a0 r a( s) A( s ) 2 1 a ( s ) r s s p1 p 2 p1 p 2 1 a0 r The standard form of a second order transfer function: (DC gain A0, resonant frequency ωn and damping factor ξ ) A0 n2 A( s ) 2 s 2n s n2 p1 p 2 a0 1 A0 ; n p1 p 2 1 a0 r ; 1 a0 r r 2 p1 p 2 1 a0 r Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 8 Frequency response of a second order system the effect of the feedback transmittance r on the magnitude response A0 1 r A0 decreases with r Overshoot of the frequency response at ωn → complex poles → under damped step response worst case stability for unity gain (r=1 and A0=1) → lowest ξ for given a0, ωp1 and ωp2 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 9 Step response for unity gain feedback A( s ) s the time domain step response is calculated as Vout (t ) L 1 damping of the oscillation amplitude depends on ξ typically, if poles ωp1 and ωp2 are close to each other ξ<1 → under damped system with fading oscillations of the step response 2 1 e nt Vout (t ) 1 sin n 1 2 t arctan 1 2 fading exponential envelope oscillations with the period depending on ωn and ξ since the sin function varies between -1 and 1 → time domain overshoot around the unit step → the overshoot and number of cycles until settling increases with a smaller ξ Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 10 Step response for unity gain feedback step response of the two stage opamp in unity gain feedback configuration optimal response the circuit is unusable as amplifier for small ξ due to the very long settling time the response stability depends on the phase margin (mφ) → optimal response for mφ=65° Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 11 Stability and phase margin a( s) closed loop gain for unity feedback: A( s ) 1 a( s) What if denominator is 0 ??? a ( s ) 1 the closed loop gain approaches ∞ → even for no input any perturbation is amplified with under damped transients → sustained oscillations occur, feedback turns positive and system becomes unstable a ( j ) 1 Barkhausen's stability criteria: a ( j ) 180 a0 solve for ω 1 1 j 1 j p1 p2 f 0dB m 180 a jodB 0 dB 180 arctan p1 0 dB arctan p2 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 12 Pole locations and phase margin the relation between pole frequencies and f0dB defines mφ and the stability of the step response This is what we need ! f p 2 f 0 dB f p 2 f 0 dB f p 2 f 0 dB m 45 m 45 m 45 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 13 Frequency compensation need fp2>f0dB so that mφ>45° → impossible to achieve by simply cascading a differential amplifier and a common source inverting amplifier 1 f p1 2 R C out1 5 1 f p 2 2 Rout 2C7 Typically: Rout1 Rout 2 C7 C5 fp1 and fp2 are close to each other !!! We need to manipulate pole locations to separate fp1 and fp2 → → frequency compensation Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 14 Miller frequency compensation idea 1: push p1 to lower frequencies by increasing C5 → must have very large values for a satisfactory mφ → not practical for the integrated opamp idea 2: use the Miller effect to virtually increase C5 → practical solution since the gain of the second stage is usually large → connect CM that emphasizes the capacitive shunt around the inverting second stage V Gm1Vin R sC5V sCM V Vout 0 out1 G V Vout sC V sC V V L out M out m 2 Rout 2 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 15 Miller frequency compensation capacitances C1,C2, C3,C4 and C6 considered small and neglected for simplicity the frequency dependent gain a(s) results: CM G G R R 1 s m1 m 2 out1 out 2 G m2 a( s) dominant terms 2 k2 s k1s 1 k R R C C C C C C out1 out 2 5 L 5 M L M 2 k1 Rout1C5 Rout 2CL Rout1 Rout 2 CM Gm 2 Rout1 Rout 2CM use the dominant pole approximation to find pole and zero locations C Gm1Gm 2 Rout1 Rout 2 1 s M Gm 2 a( s) Rout1 Rout 2CL CM s 2 Gm 2 Rout1 Rout 2CM s 1 s a0 1 zp a( s) s s 1 1 p1 p2 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 16 Miller compensation – frequency response One dominant pole, one high frequency pole and one right half plane zero: a0 Gm1Gm 2 Rout1 Rout 2 1 f p1( d ) 2 Gm 2 Rout 2 Rout1CM Gm 2 f p 2 2 C L Gm 2 f zp 2 C M GBW a0 f p1( d ) Gm1 2 CM GBW m 90 arctan f p2 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures GBW arctan f zp 17 Miller compensation – step response assume unity gain negative feedback and apply an input step to the follower A( s ) step response calculated as Vout (t ) L 1 s Slew Rate (SR) → variation rate of the output voltage Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures V SR t 18 The two stage compensated opamp – slew rate the total capacitance of every node must be charged and discharged in each cycle charging rate depends on the largest supplied current every node limits the variation rate of Vout → the slew rate is imposed by the most stringent limitation Vout SR t min SR1 , SR2 SR1 I 5 ; SR2 I 7 CM CL Typically I5<<I7, while CM and CL are comparable I5 SR CM Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 19 The two stage opamp design algorithm specifications given (others are also possible) the low frequency open loop gain a0 larger than a critical value slew rate (SR) unity-gain bandwidth (GBW) the right half plane zero frequency relative to GBW (ratio k imposed by the designer!) the typical load capacitance CL supply voltages phase margin mφ chosen according to the application (often unconditional stability !) typical transistor VDSat voltages (unless resulting from design constraints ! ) Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 20 The two stage opamp design algorithm Step 1 → calculate the required compensation capacitor CM relative to CL Gm1 GBW 2 CM f Gm 2 p 2 2 CL Gm1 GBW 2 C M f Gm 2 k GBW zp 2 CM C GBW Gm1 CL L f p2 Gm 2 CM kCM Gm1 1 Gm 2 k m f GBW , f p 2 , f zp CM GBW 1 tan 90 m arctan f p2 k CL 1 k tan 90 m arctan k Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 21 The two stage opamp design algorithm Step 2 → calculate the differential stage bias current for a given SR and CM SR I5 CM I 5 SR CM Step 3 → calculate the transconductances Gm1 and Gm2 Gm1 GBW 2 CM Gm1 2 GBW CM Gm 2 k Gm1 Step 4 → find VDSat and the geometry of the input transistors Gm1 g m1 22II D1,2 VDSat1,2 I5 VDSat1,2 Step 5 → choose VDSat for M3, M4 and M5 VDSat1,2 I5 Gm1 W L 1,2 W W ; L 3,4 L 5 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 22 The two stage opamp design algorithm Step 6 → balance the M3-M4 current mirror by choosing VDSat3=VDSat4=VDSat6 and find the geometry of M6 Gm 2 2I D6 2I7 VDSat 6 VDSat 6 I7 1 Gm 2 VDSat 6 2 Step 7 → choose VDSat7=VDSat5 and determine the geometry of M7 W L 6 W L 7 Further ideas: remember the body effect and the parasitic capacitances → Gm-s will always be smaller than expected while capacitances will always be larger → oversize try to set all currents to be integer multiples of a given bias current use a current mirror based biasing scheme instead of voltages iteratively simulate and optimize the design until all specifications have been met Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 23 The folded cascode opamp Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 24 The folded cascode opamp another typical opamp architecture → a differential amplifier followed by a current buffer and a cascode output stage for large Rout an additional output voltage follower may be used if the load is not strictly capacitive no need for frequency compensation (more on this later) elementary amplifier stages → a single V-I and I-V conversion pair I-I cascade of elementary stages (transconductance, common gate and transimpedance) I-V V-I Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 25 The folded cascode opamp the small signal low frequency model with two equivalent stages no capacitive effects → low frequency or DC voltage gain the current buffer → a subsequent I-V and V-I conversion pair with Rp and Gmp adjusted to provide a unity current gain V p1 Vp 2 Gm g m1,2 a0 Gm Rout R 1 1 p G g m 6,7 mp R g r r || g r r m 9 DS 9 DS 11 m 7 DS 7 DS 5 out Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 26 The folded cascode opamp the small signal high frequency model → consider the load and the dominant parasitic capacitances C p1 C p 2 CDB1 CDB 4 CGD 4 CSB 6 CGS 6 C p1 C p 2 C p 2 2 a( s) a0 1 sRout CL 1 sR pC p Since Rout>>Rp and CL>>Cp, the poles are always separated and the phase margin will be typically large (mφ>70°), even if mirror singularities are considered No need for frequency compensation → the circuit typically works at larger frequencies than the stable two stage opamp Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 27 The folded cascode opamp – frequency response One dominant pole and one high frequency pole (mirror singularities neglected): a0 Gm Rout 1 f p1( d ) 2 Rout CL Gmp 1 f p2 2 R p C p 2 C p GBW a0 f p1( d ) Gm 2 CL GBW m 90 arctan f p2 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 28 The folded cascode opamp – step response assume unity gain negative feedback and apply an input step to the follower A( s ) step response calculated as Vout (t ) L 1 s Slew Rate (SR) → variation rate of the output voltage V SR t large phase margin → no overshoot Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 29 The folded cascode opamp – slew rate the total capacitance of every node must be charged and discharged in each cycle charging rate depends on the largest current supplied to the node capacitances the folding node is charged rapidly → SR limited by the output node SR Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures IB CL 30 The folded cascode opamp design algorithm Step 1 → calculate the required input stage transconductance GBW Gm1 2 CL Gm1 g m1,2 2 GBW CL Step 2 → calculate the required input stage bias current SR I IB 3 CL CL I 3 SR CL Step 3 → calculate the VDSat1,2 voltage and the differential transistor pair geometry g m1,2 22II D1,2 VDSat1,2 I3 VDSat1,2 W L 1,2 VDSat1,2 g m1,2 I 3 Step 4 → choose VDSat3 and calculate the geometry of M3 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures W L 3 31 The folded cascode opamp design algorithm Step 5 → choose ID6,7=ID8,9=ID10,11=(1.5....2)·ID1,2 to avoid completely turning off the cascode stage when the opamp is slew rate limited (all I3 flows through M1 or M2) I D 6,7 1.5....2 I D1,2 I D 4,5 I D1,2 I D 6,7 2.5....3 I D1,2 Step 7 → choose VDSat for all transistors (except M1, M2 and M3) and determine the geometries Further ideas: remember the body effect and the parasitic capacitances → Gm-s will always be smaller than expected while capacitances will always be larger → oversize try to set all currents to be integer multiples of a given bias current use a current mirror based biasing scheme instead of voltages iteratively simulate and optimize the design until all specifications have been met Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 32 Bibliography P.E. Allen, D.R. Holberg, CMOS Analog Circuit Design, Oxford University Press, 2002 B. Razavi, Design of Analog CMOS Integrated Circuits, McGraw-Hill, 2002 D. Johns, K. Martin, Analog Integrated Circuit Design, Wiley, 1996 P.R.Gray, P.J.Hurst, S.H.Lewis, R.G, Meyer, Analysis and Design of Analog Integrated Circuits, Wiley,2009 R.J. Baker, CMOS Circuit Design, Layout and Simulation, 3rd edition, IEEE Press, 2010 Analog Integrated Circuits – Fundamental building blocks – Basic OTA/Opamp architectures 33