Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Product Manual
Ultrasonic Sensor
Version1.0
Phi Robotics Research Pvt. Ltd.
www.phi-robotics.com
Table of Contents
1
Introduction ................................................................................................................................................... 2
2
Board Features ............................................................................................................................................... 2
3
Specifications ................................................................................................................................................. 2
4
Hardware Connections ................................................................................................................................... 3
5
Pseudo Code ................................................................................................................................................... 4
5.1
Getting Distance Value.......................................................................................................................... 4
1
Introduction
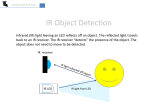
Ultrasonic sensor module is used for measuring the distance between the sensor and an obstacle. The sensor
works on the principle similar to radar or sonar. The sensor produces the high frequency sound and evaluates
the echo received by the sensor. Sensor then calculates the time interval between sending the signal and
receiving the echo to determine the distance between the objects. The Ultrasonic sensor provides 2cm - 400cm
non-contact measurement function, the ranging accuracy can reach to 3mm. The sensor includes ultrasonic
transmitter, receiver and a control circuit. The working principle of the module is as follows- set the trigger
pin high for at least 10 µs, then module automatically sends eight pulses of 40 KHz and detects whether the
pulses are echoed or not. The echo pin goes high and remains high till the echo is received (38ms Max).
Calculations are as follow:
Test Distance = (High level time X Velocity of the sound (340M/S))/2.
High level Time = Timer count * Time period
2
3
Board Features
Small and compact size
Standard operating frequency and good sensitivity
Ideal for use in range measurements, robot applications
Specifications
Input operating voltage: 5V
Working current: 15mA
Range: 2cm to 400cm
Resolution: 0.3 cm
Measuring angle: 30 degree
Trigger Input pulse width: 10 µs
4
Hardware Connections
Figure 1 - Ultrasonic sensor pin layout
The module has 4 pin header for interfacing. Figure 1 above shows the pin layout. Apart from 2 power supply
pins, Ultrasonic Sensor has a trigger and an echo pin for distance measurement. When a pulse of 10 µs is
provided to trigger pin, sensor transmits ultrasonic wave. Default state for echo pin is logic 1. Echo pin goes
low after 550-570 µs after trigger pulse is issued, and again goes high when the sensor receives reflected
ultrasonic wave. The distance between the sensor and the obstacle can be calculated by measuring the time
period for which the echo pin stays low. Following is the equation to calculate distance in cm from measured
pulse low time.
𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑒 (𝑐𝑚) =
𝑝𝑢𝑙𝑠𝑒 𝑙𝑜𝑤 𝑡𝑖𝑚𝑒 (µ𝑠)
58
5
Pseudo Code
5.1 Getting Distance Value
int32_t ultrasonicGetDistance(void)
{
int32_t distance, timerCount, time_us;
// issue trigger pulse
gpioSet(TRIGGER);
delay_us(10);
// trigger pulse width should be min 10 us
gpioCLear(TRIGGER);
// wait till echo pin goes high
while(!(gpioReadPin(ECHO)));
// start timer
timerStart();
// wait till echo pin goes low
while(gpioReadPin(ECHO));
// stop timer
timerStop();
// read timer count
timerCount = timerGetCount();
// convert timer count to time in micro seconds,
// according to timer settings
time_us = timerCount * TIMER_SCALING_FACTOR;
// calculate distance in centimetres
distance_cm = time_us / 58;
return distance_cm;
}
Phi Robotics Research Pvt. Ltd.
www.phi-robotics.com