Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Commutator (electric) wikipedia , lookup
Three-phase electric power wikipedia , lookup
Electric battery wikipedia , lookup
Electrification wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Current source wikipedia , lookup
Stray voltage wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Electric motor wikipedia , lookup
Opto-isolator wikipedia , lookup
Mains electricity wikipedia , lookup
Power electronics wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power inverter wikipedia , lookup
Electric machine wikipedia , lookup
Induction motor wikipedia , lookup
Buck converter wikipedia , lookup
Alternating current wikipedia , lookup
Brushless DC electric motor wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Dynamometer wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
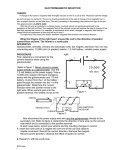
Permanent-magnet motor-generator or starter-generator Review & Renew J. Philip Barnes 14 Sept 2015 • Any electric motor is a generator and vice versa • “Motor-generator” applications: electric vehicles • “Starter-gen.” applications: aircraft APUs/engines • Assumed herein: “permanent magnet” behavior – Classical brushed-DC, or typical 3-phase brushless • Introduced herein: “4-constant equivalent DC” model – Efficiency Vs. non-dim. speed, voltage, current, torque – Predict motor-generator performance at any voltage – New, fundamental, previously-unpublished formulas www.HowFliesTheAlbatross.com Brushed-DC motor-generator fundamental characteristics (+) Charge (q) with velocity, V in magnetic field of strength, B: Force vector, F = q V x B w L B Fq e i E i vi v q Fp Motoring Electromotive force, e = potential energy / charge = work / charge, (Fp / q) L = 2 N w (D/2) B L e = NDBL w ≡ k w t k =“EMF const.” k = e/w = t/i Volts/(rad/s) or N-m/Amp Torque, t = 2N (D/2) B (dx/dt) dq = 2N (D/2) B (dq/dt) dx t = NDBiL = NDBL i = k i Model aircraft: “Kv” RPM/Volt = 60/(2pk) t w Fq e Change to generator mode: Same direction, rotation, w Same sign for EMF, e Sign change of torque, t Sign change of current, i i E i vi v q Fp B Generating 2 www.HowFliesTheAlbatross.com “Equivalent-DC” brushless machine + inverter/rectifier emg R kw i InverterRectifier eb t = ki ±l w BLDC system has same characteristics of classic brushed-DC: • 2-wire interface with the battery (or power source) • Motor-generator EMF proportional to rotation speed, (w) • Torque (t), +/- fixed loss (l), is proportional to current (i) • System resistance (R) incl. batt., cables, & M-G windings • “Battery” can be supercap., other gen., or power supply • “Chopping loss” not included (Inverter at 100% duty cycle) www.HowFliesTheAlbatross.com Brushless motor with “six-pack” inverter-rectifier VB 1 VB • • • • 2 1 2 -7V 15V 3 3 Inverter converts 2-wire DC to 3-wire "AC“ Alternating transistor “diagonal pairs” Commutation toggles each phase 0-to-VB Relatively low frequency, 100% duty cycle 4 www.HowFliesTheAlbatross.com Brushless generator with “six-pack” inverter-rectifier Snapshot e1 - e3 > eB 1 1 eB Diodes provide "free" regen! 2 2 3 3 • • • • M-G max delta EMF exceeds battery EMF Six-pack rectifies 3-wire AC into 2-wire DC Battery recharged through flyback diodes IGBTs unidirectional: commutation ignored ~ “DC” current 5 www.HowFliesTheAlbatross.com 4-constant “Equivalent-DC” starter/motor-generator model Phil Barnes Sept 2015 i R emg = kw w Motoring eb t=ki-l i R emg = kw w eb Generating t = k i +l Model accommodates motor, gen, or motor-gen Model predicts M-G performance at any Voltage Fixed torque loss (l) ≈ 0.8% of stall torque, keb/R Torque loss and resistance (R) degrade efficiency Neglecting losses, motor efficiency = EMF ratio Neglecting losses, gen. efficiency = 1 / EMF ratio Next chart: 4-constant model matches test data www.HowFliesTheAlbatross.com 1. Definitions: EMF ratio, n ≡ emg/eb Fixed torque loss, l EMF const., k = emg/w = (t+l)/i System resistance, R 2. Simple circuit model: Non-dim current, iR/eb = 1-n System efficiency, h = tw/(ebi) Combine circuit model EQs: “4-const. Equiv. DC” model motor: n < 1 - lR/(keb): Generator: n > 1, h = ebi /(tw): 4-constant “Equivalent-DC” model matches test data Starter/motor-generator system efficiency (h) Brushed-DC or Brushless with inverter/rectifier Sys. "4-const. EqDC" model, sys. resistance (R) & fixed torque loss (l) eb = battery EMF, k = EMF constant, t = torque, w = rotation speed 1 System efficiency, tw/(ebi) or ebi/(tw) 0.9 0.8 0.7 GENERATING LMCLTD.net eb=48V / 3,600 RPM k = 0.16 N-m/A R = 0.041 Ohm l, N-m ≈ 0.010 k eb / R motor and battery 0.6 MOTORING VisForVoltage.org 1-HP Scott motor eb=24V / 15,000 RPM k = 0.070 N-m/A R = 0.054 Ohm l, N-m ≈ 0.0065 k eb / R generator & battery ideal motor system 0.5 ideal generator sys. test_data 0.4 0.2 4-constant EqDC model, generator 4-constant EqDC model, motor 0.1 Phil Barnes Sept 2015 0.3 0 0 0.2 0.4 0.6 0.8 1 1.2 n ≡ EMF ratio, emg /eb = k w /eb = speed ratio, w / (eb /k) www.HowFliesTheAlbatross.com 1.4 1.6 4-constant “Equivalent-DC” model: Torque and Current "4-const. equiv.-DC" model: Starter-gen or motor-gen. system efficiency & non-dim. speed, current, & torque 1 0.9 0.8 0.7 0.6 Torque group, tR/(keb) or Current group, i R / eb 0.5 0.4 0.3 Lines/curves: model symbols: test data 0.2 0.1 GENERATING LMCLTD.net eb=48V / 3,600 RPM k = 0.16 N-m/A R = 0.041 Ohm l, N-m ≈ 0.010 k eb / R MOTORING VisForVoltage.org 1-HP Scott motor eb=24V / 15,000 RPM k = 0.070 N-m/A R = 0.054 Ohm l, N-m ≈ 0.0065 k eb / R Non-dimensional rotation speed: n = w / (eb /k) Non-dim. torque: t R / (k eb ) ≈ 1-n- l R/(keb ) Non-dim. current: i R/eb = 1-n Torque & current change sign, generator mode n ≡ EMF ratio, emg /eb = k w /eb = speed ratio, w / (eb /k) 0 -0.1 -0.2 -0.3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 www.HowFliesTheAlbatross.com 0.9 1 1.1 1.2 1.3 Brushless machine commutation and speed control Battery Commutation “accommodates” RPM, matching fields & magnets Terminal Voltage ground Whether or not the machine is “sensorless,” rotor position or phase EMF is sensed for commutation Pulse-width modulation (PWM), superimposed on commutation, indirectly “controls” speed by chopping current, & thus torque | t | | | dt • Commutation “accommodates” the existing RPM • Relatively low frequency, order ~100-1000 Hz • PWM reduces speed via chopping at duty cycle (d) • PWM is applied only to “upper” 6-pack IGBTs • Relatively high frequency, order ~20 kHz • Switching loss prompts alternate architectures • Also, PWM is not well suited for regeneration 9 www.HowFliesTheAlbatross.com DC boost architecture – increased capability and efficiency Regen 233 Vdc in Motor VB L PWM C M-G iGBT 5 10 15 20 kW "Evaluation of 2004 Toyota Prius," Oakridge National Lab, U.S. Dept. of Energy • • • • • • DC boost architecture enables efficient bi-directional power Age-old regen problem: reduced motor-gen RPM & EMF < battery DC boost converter (DCBC) amplifies either battery or MG Voltage Low-Voltage PWM duty cycle at IGBT gate sets DCBC Voltage gain Highest system efficiency, with or without interest in regeneration For starter-gen, DCBC is well suited to adjust torque-speed profile 10 www.HowFliesTheAlbatross.com System efficiency and current with DC boost converter • • • • • • Get sys. efficiency & battery current for DC boost architecture With the DCBC, current “gain” is inverse of Voltage gain (G) Boost battery Voltage to motor ; otherwise boost MG Voltage Say “half resistance (Rh)” resides up & downstream of DCBC Solve for Voltage at node “a” to get battery current by mode Efficiency has trends shown earlier, but Vs. ne ≡ Gmkw/(Gbeb) ib = [eb Gb2- Gb kw] / [Rh (1+Gb2)] motoring G ≡ DCBC voltage gain Rh ib eb a Rh Gb ib = [kwGm - eb] / [Rh (1+Gm2)] kw ib /Gb tw Motoring Rh ib eb a regeneration Rh Gm kw Gm ib tw Generating 11 www.HowFliesTheAlbatross.com Summary: PM Motor-generator Review & Renew • • • • • • • • • Assumed: “permanent-magnet-type” behavior Review: Classic brushed-DC machine principles Renew: Brushless + inverter/rectifier “Equiv. DC” Review: “Six-pack” inverter & rectifier operation Renew: New formulas for system efficiency Renew: Non-dimensional speed, torque, current Renew: New methods validated by test data Review: “Chop” Vs. “DC boost” speed control Renew: System efficiency & current with DCBC www.HowFliesTheAlbatross.com About the Author Phil Barnes has a Master’s Degree in Aero Engineering from Cal Poly Pomona and BSME from the University of Arizona. He is a 35-year veteran of air vehicle, propulsion, and subsystems performance analysis at Northrop Grumman. Phil authored a “landmark” study of dynamic soaring, and he is pioneering the science of regenerative electric flight. Author of numerous SAE, AIAA, and other technical papers, he is often invited to present travel-paid lectures at various universities. The charter of his free website is to apply “green aero engineering” to help prevent or delay extinction of the wandering albatross. 13 www.HowFliesTheAlbatross.com