Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Pulse-width modulation wikipedia , lookup
Three-phase electric power wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Solar micro-inverter wikipedia , lookup
Electrical substation wikipedia , lookup
Stepper motor wikipedia , lookup
History of electric power transmission wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Electrical ballast wikipedia , lookup
Power inverter wikipedia , lookup
Voltage optimisation wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Stray voltage wikipedia , lookup
Surge protector wikipedia , lookup
Mains electricity wikipedia , lookup
Schmitt trigger wikipedia , lookup
Voltage regulator wikipedia , lookup
Two-port network wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Power electronics wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Current source wikipedia , lookup
Alternating current wikipedia , lookup
Network analysis (electrical circuits) wikipedia , lookup
Buck converter wikipedia , lookup
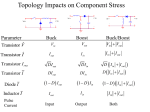
Analysis of the OPA569 Bridge-Tied-Load defaults Background Our design follows the TI verified design document: SLAU503-June 2013-Revised June 2013 [RD1] This Voltage-to-Current converter design has been chosen because our load is driven with a current. Our actual load is equivalent to an RL series component; however in view of our frequency requirements and to simplify our troubleshooting analysis, we have simplified the load to a simple resistor. The problem still exists, even when the circuit is driven by a DC voltage. Figure 1 shows the circuit as is currently used in our design R = 2.5kΩ Imon VIN Input from a DAC U1 Iout(U1) Rload = 10 Ω R = 14kΩ Vm Vload = Vp-Vm Iload~=-Iout(U1) U2 R = 14kΩ Vp Figure 1 - Circuit schematic Expected performance System operation is calculated as follows: 𝐼𝑚𝑜𝑛 = 𝑉𝑟𝑒𝑓 −𝑉𝑖𝑛 𝑅𝑠𝑒𝑡 with Rset = 2500Ω (1) Current is negative/flows into U1 if Vin >Vref Current is positive/flows out of U1 if Vin <Vref 𝐼𝑜𝑢𝑡 (𝑈1 ) = 475 ∙ 𝐼𝑚𝑜𝑛 = −𝐼𝐿𝑜𝑎𝑑 (2) Op Amp U1 sinks current if Vin >Vref Op Amp U1 sources current if Vin < Vref 𝑉𝑙𝑜𝑎𝑑 = −475 ∙ 𝐼𝑚𝑜𝑛 ∙ 𝑅𝐿𝑜𝑎𝑑 = 475 𝑉𝑖𝑛 −𝑉𝑟𝑒𝑓 Vload is positive for Vin > Vref Vload is negative for Vin < Vref 𝑉 𝑅𝑠𝑒𝑡 𝑅𝐿𝑜𝑎𝑑 𝑉𝑜𝑢𝑡 (𝑈1 ) = 𝑉𝑟𝑒𝑓 − 𝑙𝑜𝑎𝑑 & 𝑉𝑜𝑢𝑡 (𝑈2 ) = 𝑉𝑟𝑒𝑓 + 2 Vout(U1) < Vref < Vout(U2) if Vin > Vref Vout(U1) > Vref > Vout(U2) if Vin < Vref 𝑉𝑙𝑜𝑎𝑑 2 (3) (4) Theoretical operation is detailed in the enclosed Excel file. The math in the Excel file takes into account the U2 input resistor values. Imonitor limit condition Datasheet constraints state that: When the OPA569 sources current, the Imonitor pin should be at least 200 mV less than the output voltage. For our design, the Imonitor pin is fixed at Vref=2.048V Therefore, this constraint is equivalent to: >If U1 sources current, U1 output voltage should be over 2.248 V. In this case, U2 sinks current. >If U1 sinks current, output voltage should be under 1.848 V. In this case, U2 sources current. Table 1 - Op Amp output voltages Vin Imonitor Iout(U1) Vout(U1) Vout(U2) <1.84V >84 µA >40 mA >2.248V <1.848V 1.84 V 84 µA 40 mA 2.248V 1.848V 1.84V to 2.048V 84µA to 0µA 40mA to 0 mA 2.248V to 2.048V 1.848V to 2.048V 2.048V to 2.26 V 0 µA to -84 µA 0 mA to -40 mA 2.048V to 1.848V 2.048V to 2.248V Vin > 2.26V < -84 µA < -40 mA < 1.848V > 2.248V As seen in the above table, the Imonitor condition is not verified when the circuit operates near the resting point. This operation is also coherent with the Verified Design values: in the TI design, the Imonitor condition is not verified for 2.1V< Vin <2.9V In more general terms, the Imonitor condition is not verified if: 𝑅𝑠𝑒𝑡 100 𝑚𝑉 𝑅𝑠𝑒𝑡 100 𝑚𝑉 𝑉𝑟𝑒𝑓 − 2 < 𝑽𝒊𝒏 < 𝑉𝑟𝑒𝑓 + 2 𝑅𝐿𝑜𝑎𝑑 475 𝑅𝐿𝑜𝑎𝑑 475 Experimentally, we have never observed a current default flag within this range. Note: In the verified design, the Imon pin of U2 is left floating, which is allowed [When not being used, the Current Monitor pin may be left floating] In our design, this pin is connected to a transimpedance circuit, which forces the Imon pin of U2 to Vref. The feedback resistor is small enough to guarantee linear operation. Conclusion: Our flag default conditions are as follows: For Vin < ~200 mV, amp U1 shows a current default flag. In this setting, U1 output voltage is around 3.8V. For Vin > ~4 V, amp U2 shows a current default flag. In this setting, U2 output voltage is around 3.9V In both of the above cases, the concerned amps are sourcing current when the flag appears. Therefore, no flag should appear as the corresponding output voltage is >>2.25V. Output clamping condition On page 3 of the datasheet, voltage swing is stated to be 0.3V from supply rails for a 2 amp output drive. This is roughly twice the typical value. Typical curves (page 5) show that the swing to rail range is much lower in low output current conditions. We expect, for an output drive of 350 mA, that the range should be at least 150mV to 4.8V In addition, page 14 of the datasheet states: A quick way to estimate the output swing with various output current requiremens is by using the equation: Vswing[typical] = 0.1*I0 ; which in our application is around 40 mV. In any case, our output voltages should never go beyond [0.10V; 3.99 V] in theory. Using a traditional voltage feedback The considered solution is to add a 2.5k resistor as feedback between U1 output and inverting input (standard inverter design) Unfortunately, this solution is not possible for us; we require a current drive. Our actual load is an RL series circuit and we wish to generate a current, independently of the R/L value dispersion. Note that the problem is independent of the inductance value: the problem is visible at all our operating frequencies, including DC. In addition, the problem is also present when the real load is replaced by a simple resistor. Followup questions 1. There doesn’t seem to be any link mentioned in the datasheet between the Imonitor pin and the Ilimit pins. How does a non-linearity current recopy error create an Ilimit flag? 2. In addition, as we have seen in this document, non-linearity appears around the resting point, not at maximum swing values. This is not compatible with the Imonitor / 200 mV condition. Why would flags appear near maximum swing and not near resting point? 3. The schematic on page 9 shows floating Imon pins (which is allowed by datasheet); however, this doesn’t generate any current limit flag. This is expected operation: current monitor is non-linear, but is independent of the current limitation. 4. You suggest transforming the circuit into a traditional inverter type. In this circuit, output current swing is larger and voltage range is closer to rails (comparing simulation results on page 5 and 10). Despite this, there is no clamping.