Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Signal Corps (United States Army) wikipedia , lookup
Regenerative circuit wikipedia , lookup
Cellular repeater wikipedia , lookup
Radio transmitter design wikipedia , lookup
Oscilloscope types wikipedia , lookup
Josephson voltage standard wikipedia , lookup
Integrating ADC wikipedia , lookup
Oscilloscope history wikipedia , lookup
Current source wikipedia , lookup
Analog television wikipedia , lookup
Valve RF amplifier wikipedia , lookup
Operational amplifier wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Power MOSFET wikipedia , lookup
Current mirror wikipedia , lookup
Schmitt trigger wikipedia , lookup
Surge protector wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Power electronics wikipedia , lookup
Voltage regulator wikipedia , lookup
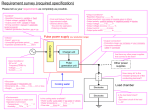
Throttle System High Level Overview Tachometer Voltage Voltage: 0 – 5V Frequency: “0” – 208Hz - Speed linearly related to frequency as shown in plot below DAC Throttle Signal: Voltage: 0.55 – 2.75V 1 1 Throttle Arduino Analog Throttle Signal: Voltage: 0 – 3.3V PWM signal: Voltage: 0 – 3.3V Period = 22ms Positive Pulse Width: 1ms – 2ms 1 Digital Level Shifting 1 PWM signal: Voltage: 0 – 5V Period = 22ms Positive Pulse Width: 1ms – 2ms RC Receiver Level Shifting Circuit: Components: Amplifier and two resistors Shifts Input Voltage: 0.55 – 2.75V To Output Voltage: 0 – 3.3V - 5kΩ resistor used to imitate the 5kΩ throttle pedal variable resistor for correct current draw from stock golf cart controller. Prevents stock controller from thinking it has lost connection with throttle pedal. - Single relay selects signal going to golf-cart controller; pedal signal or generated signal. Relay is controlled by the main board; 3.3 V from the main board switches the generated signal to the golf cart controller . Stock Golf Cart Motor Controller 1 1 Motor Power to Motor Voltage: Unknown Braking System High Level Overview Brake Controller PWM Signal: Voltage: 0 – 5 V Period = 22ms Positive Pulse Width: 1ms – 2ms Brake Controller PWM Signal: Voltage: 0 – 3.3 V Period = 22ms Positive Pulse Width: 1ms – 2ms 1 Throttle Arduino PWM signal: Voltage: 0 – 3.3V Period = 22ms Positive Pulse Width: 1ms – 2ms 1 Digital Level Shifting 1 Potentiometer Voltage Voltage: 0 – 3.3V - Actuator position linearly related to voltage. - Full retraction: 13 mV - Full extension: 383 mV 1 1 2 Actuator Digital Level Shifting Current to Actuator Voltage: 12 V Current: ±10 A Brake Actuator Controller: Converts Input PWM: 1ms – 2ms Positive Pulse Width To Output Current: -10 A – 10 A @ 12 V Actuator Stop Condition: 1.5 ms Positive Pulse Width - Controller settings need to be as shown in the image below. - Information on the motor controller can be found here. PWM signal: Voltage: 0 – 5V Period = 22ms Positive Pulse Width: 1ms – 2ms RC Receiver http://www.lynxmotion.com/p-563-sabertooth-2x12-rc-regenerative-dual-channel-motor-controller.aspx Steering System High Level Overview 1 Potentiometer Voltage Voltage: 0 – 3.3V - Steering angle linearly related to voltage. - Full Left: 1.412 V - Full Right: 3.2 V DAC Differential Steering Signals: Voltage: 0.55 – 2.75V 2 2 Steering Arduino PWM signal: Voltage: 0 – 3.3V Period = 22ms Positive Pulse Width: 1ms – 2ms 1 Digital Level Shifting 1 Analog Steering Differential Signal: Voltage: 0 – 5V Steering Reference Voltage for Level shifting: Voltage: 1 V PWM signal: Voltage: 0 – 5V Period = 22ms Positive Pulse Width: 1ms – 2ms RC Receiver 1 Main Arduino Level Shifting Circuit: Components: Amplifier and two resistors Shifts Input Voltage: 0.55 – 2.75V To Output Voltage: 0 – 5V - Single relay selects signal going to power steering controller; torque sensor or generated signals. Relay is controlled by the main board; 3.3 V from the main board switches the generated signal to the power steering controller . Power Steering Controller / Wicked Module