Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Fictitious force wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Center of mass wikipedia , lookup
Old quantum theory wikipedia , lookup
Hooke's law wikipedia , lookup
Classical mechanics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Optical heterodyne detection wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Brownian motion wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Matter wave wikipedia , lookup
Mass versus weight wikipedia , lookup
Electromagnetic mass wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Equations of motion wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Seismometer wikipedia , lookup
Hunting oscillation wikipedia , lookup
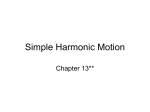
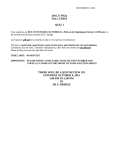
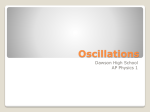
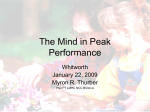
Abby Ye, Zi C083 AII1 Topic: Energy in Simple harmonic motion; damped, forced, free oscillations and resonance A. Introduction Simple harmonic motion (SHM) is the motion of a simple harmonic oscillator, a motion that is neither driven nor damped. The motion is periodic - as it repeats itself at standard intervals in a specific manner - and sinusoidal, with constant amplitude; the acceleration of a body executing SHM is directly proportional to the displacement of the body from the equilibrium position and is always directed towards the equilibrium position. The motion is characterized by its amplitude (which is always positive), its period, the time for a single oscillation, its frequency, the reciprocal of the period (i.e. the number of cycles per unit time), and its phase, which determines the starting point on the sine wave. The period and frequency are constants determined by the overall system, while the amplitude and phase are determined by the initial conditions (position and velocity) of that system. A typical example of a system that undergoes simple harmonic motion is a spring-mass system, which is a mass attached to a spring. Simple harmonic motion shown both in real space and phase space. The orbit is periodic. (Here the velocity and position axes have been reversed from the standard convention in order to align the two diagrams) 1 If the spring is unstretched, there is no net force on the mass - in other words, the system is in equilibrium. However, if the mass is displaced from equilibrium, the spring will exert a restoring force, which is a force that tends to restore it to the equilibrium position. In the case of the spring-mass system, this force is the elastic force, which is given by Hooke's Law, F = − kx, where F is the restoring force, x is the displacement, and k is the spring constant. Any system that undergoes simple harmonic motion exhibits two key features. 1. When the system is displaced from equilibrium there must exist a restoring force that tends to restore it to equilibrium. 2. The restoring force must be proportional to the displacement, or approximately so. The spring-mass system satisfies both. Once the mass is displaced it experiences a restoring force, accelerating it, causing it to start going back to the equilibrium position. As it gets closer to equilibrium the restoring force decreases; at the equilibrium position the restoring force is 0. However, at x=0, the mass has some momentum due to the impulse of the force that has acted on it; this causes the mass to shoot past the equilibrium position, in this case, compressing the spring. The restoring force then tends to slow it down, until the velocity reaches 0, whereby it will attempt to reach equilibrium position again. As long as the system does not lose energy, the mass will continue to oscillate like so; thus, the motion is termed periodic motion. Further analysis will show that in the case of the spring-mass system the motion is simple harmonic. B. Analysis Energy in Simple harmonic motion: E = (1/2)kA2 The energy E in the system is proportional to the square of the amplitude. It is a continuously changing mixture of kinetic energy and potential energy. For any object executing simple harmonic motion with angular frequency , the restoring force F = -m2x obeys Hooke's law, and therefore is a conservative force. We can define a potential energy U = (1/2) m2x 2, and the total energy of the object is given by E = (1/2)m2A2 The simple harmonic motion of a mass on a spring is an example of an energy transformation between potential energy and kinetic energy. In the example 2 below, it is assumed that 2 joules of work has been done to set the mass in motion. Damped oscillations: produced by resistive forces which dissipate the energy of the vibrating system Damping is a condition in which external force operates in such a manner that it impedes the motion of oscillatory body. As a matter of fact, all real time harmonic motions that we consider to be simple are actually damped SHM. We consider them SHM only as an approximation. The motion of a block hanging from a spring, for example, is not SHM as air works to oppose the motion – at every instant. As a consequence, the span (amplitude) of the motion keeps decreasing every cycle. Diminishing amplitude is the characterizing feature of damped oscillation. A typical displacement – time plot looks as shown here. We know that in reality, a spring won't oscillate for ever. Frictional forces will diminish the amplitude of oscillation until eventually the system is at rest. We will now add frictional forces to the mass and spring. Imagine that the mass was put in a liquid like molasses. Your lab instructor will not like it when they see their nice metal weight coated with a thick layer of ants in the morning. Be that as it may, when the mass is inside the molasses, it'll hardly oscillate at all. Here's a plot of of an example of such a function 3 An example of light damping: the amplitude of vibration of the oscillation to decrease gradually. Critical damping causes the displacement possible, without any oscillation of the object. Over-damping also causes an exponential reduction in displacement, but over a greater time than for critical damping. Forced oscillations: a periodic driving force is applied to a system which is capable of vibration. The oscillations we have discussed up to now are free oscillations in which the system is given some energy, then left alone. For instance, you could pull a child on a swing up to a certain height, then let go and wait for the motion to die away. But this is not the only possibility; we could also repeatedly push the swing at any frequency we like and watch what happens. In this case we say that we have forced oscillations. There are now two frequencies in the problem: the natural frequency of the free oscillations, and the driving frequency of the forced oscillations. This means that you will have to resist the urge to use the formula whenever you encounter a frequency. If the frequency in question is the driving frequency, there is no formula for it; it is simply set by the design of the driving circuit. It is clear from the discussion so far that most of artificial oscillation system tends to cease as damping is part of the natural set up. There can be various sources of damping force, but friction is one common source. There can be air resistance or resistance at the fixed hinge from which oscillating part is hung. It is imperative that we supply appropriate energy (force) to compensate for the loss of energy due to damping. To meet this requirement, the oscillating system is subjected to oscillatory external force. Free oscillations: no resistive forces acting on the oscillation system. Harmonic oscillation is the periodic process in which the parameter of interest is varied as sinus or cosine. If there is no time-dependent force applied to the oscillator, then it is called a free oscillator. 4 Resonance: Resonance occurs when the natural frequency of vibration of an object is equal to the driving frequency, giving a maximum amplitude of vibration. The resonance is an interesting feature of oscillation. This phenomenon attracts interest as it makes possible to achieve extra-ordinary result (material failure of large structure) with small force! Resonance also explains why earthquake causes differentiating result to different structures – most devastating where resonance occurs! The condition for maximum amplitude is obtained by differentiating amplitude function with respect to applied frequency “ωe” and setting the resulting expression equal to zero. If damping is absent, then the amplitude function is maximum when applied frequency is equal to natural frequency. The amplitude is infinite in such case. However, damping is always present in actuality and as such resonance amplitude is finite. For small value of damping constant, the resonance frequency is close to natural frequency and resonance is sharply defined. As the damping increases, resonance amplitude is reduced. The plots of amplitude – frequency curves outline the features of resonance amplitude as shown in the figure. Note that resonance becomes flatter as damping force increases. Resonance underlines certain fundamental aspects of oscillatory system. First, it demonstrates that oscillation is a storing mechanism of energy. Second, it demonstrates that the energy can be supplemented in a constructive manner to increase the energy of the oscillating system to an extra-ordinary level. We can experience both these aspects easily by observing motion of swings in a nearby park. Ask a very strong adult to apply the most of his/her power to swing in one go and compare the result with that of a child who produces large swings with no such power. What is the difference? The child begins with small swing and synchronizes subsequent jerk with the oscillation. Each time the energy of the 5 system is increased by the small amount associated with each jerk. The key, here, is the synchronization (timing of external force) and periodicity with which the jerk is applied to the swing. Resonance is not specific to mechanical oscillatory system. The concept is equally applicable to electrical system and waves in general. Tunning of a particular radio station at a specific frequency is one of the most striking applications of this phenomenon. Many vibrating systems like atomic arrangements, vibrating strings etc have multiple natural frequencies. This means that these systems can be subjected to resonance at more than one frequency. C. Examples Example 1 Question: A block of mass m=4 kg is attached to a spring, and undergoes simple harmonic motion with a period of T=0,35s. The total energy of the system is E=2.5J. What is the force constant of the spring? What is the amplitude of the motion? Answer: The angular frequency of the motion is Now, for a mass on a spring. Rearrangement of this formula yields The total energy of a system executing simple harmonic motion is Rearrangement of this formula gives Thus, the force constant is and the amplitude is . . Example 2 A particle that hangs from a spring oscillates with an angular frequency of 2 rad/s. The spring is suspended from the ceiling of an elevator car and hangs motionless (relative to the car) as the car descends at a constant speed of 1.5 m/s. The car then suddenly stops. Neglect the mass of the spring. (a) With what amplitude does the particle oscillate? (b) What is the equation of motion for the particle? (Choose the upward direction to be positive.) 6 Solution: (a) When traveling in the elevator at constant speed, the total force on the mass is zero. The force exerted by the spring is equal in magnitude to the gravitational force on the mass, the spring has the equilibrium length of a vertical spring. When the elevator suddenly stops, the end of the spring attached to the ceiling stops. The mass, however has momentum, p = mv, and therefore starts stretching the spring. It moves through the equilibrium position of the vertical spring with its maximum velocity vmax = 1.5m/s. Its velocity as a function of time is v(t) = -Asin(t+). Since vmax = A and = 2/s, the amplitude of the amplitude of the oscillations is A = 0.75m. (b) The equation of motion for the particle is d2x/dt2 = -(k/m)x = -2x.Its solution is x(t) = Acos(t+) = 0.75mcos(2/st+). If we choose the t = 0 to be the time the elevator stops and let the upward direction be positive, then x(0) = 0, and v(0) = 1.5m/s. We therefore need to be /2. Example 3 A mass-spring system oscillates with an amplitude of 3.5cm. If the force constant of the spring of 250N/m and the mass is 0.5kg, determine (a) the mechanical energy of the system, (b) the maximum speed of the mass, and (c) the maximum acceleration Solution: (a) We have m = 0.5kg, A = 0.035m, k = 250N/m, 2 = k/m = 500/s2, = 22.36/s. The mechanical energy of the system is E = (1/2)kA2 = 0.153J. (b) The maximum speed of the mass is vmax = A = 0.78m/s. (c) The maximum acceleration is amax = 2A = 17.5m/s2. D. Bibliography http://hyperphysics.phy-astr.gsu.edu/hbase/shm2.html http://farside.ph.utexas.edu/teaching/301/lectures/node146.html http://electron9.phys.utk.edu/phys135d/modules/m9/oscillations.htm http://en.wikipedia.org/wiki/Simple_harmonic_motion#Introduction http://physics.ucsc.edu/~josh/6A/book/harmonic/node18.html http://sysdyn.clexchange.org http://www.walter-fendt.de/ph11e/resonance.htm http://maxwell.byu.edu/~spencerr/websumm122/node100.html http://www.acoustics.salford.ac.uk/feschools/waves/shm3.html 7 http://cnx.org/content/m15880/latest/ http://www.answers.com/topic/forced-oscillation 8