Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
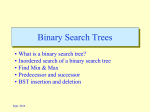
Operations on Dynamic Sets Data Structures for Dynamic Sets Algorithms operate on data, which can be thought of as forming a set S. The data sets manipulated by algorithms are dynamic, meaning they can grow, shrink, or otherwise change over time. • • • • • • Data Structures are structured ways to represent finite dynamic sets. Different data structures support different kinds of data manipulations, e.g., § dictionary: insert, delete, test for membership § priority queue: insert, extract-max • INSERT (S, x) adds element pointed to by x to S DELETE (S, x) removes element pointed to by x from S SEARCH (S, k) returns pointer to element x with key[x] = k (or returns nil) MINIMUM (S) returns element with the smallest key MAXIMUM (S) returns element with the largest key SUCCESSOR (S, x) returns element with the next key larger than key[x] PREDECESSOR (S, x) returns element with the next key smaller than key[x] Running Time of a dynamic set operation is usually measured in terms of the size of the set (i.e., number of elements currently in the set). 1 Elementary Data Structures (Ch. 10) 2 Binary Search Trees (Ch. 12) Binary Search Trees should also be review from CS102. Recall These elementary data structures should be a review from CS102: that every tree node (internal or leaf) contains a key. o arrays and linked lists (singly linked, doubly linked) Binary Search Tree Property: For every node x in tree, o stacks (e.g., implemented with arrays and lists) o key[y] ≤ key[x] for every y in left(x) (left subtree of node x) o queues (e.g., implemented with arrays and lists) o key[y] ≥ key[x] for every y in right(x) (right subtree of node x) o rooted trees (e.g., arbitrary trees using pointers, complete Operations on BSTs (all dynamic set operations are supported) d-ary trees using arrays) o INSERT (S, x), DELETE (S, x) o SEARCH (S, k), MINIMUM (S), MAXIMUM (S) o SUCCESSOR (S, x), P REDESSOR (S, x) 3 4 BST Traversals • BST Search The BST property allows us to print out all keys in sorted order using a simple recursive algorithm called an inorder tree walk. Strategy: visit left(x), visit x, visit right(x) Inorder-Tree-Walk(x) /** start at root **/ 1. if x ≠ NIL then 2. Inorder-Tree-Walk(left(x)) 3. print key[x] 4. Inorder-Tree-Walk(right(x)) Running time = θ(n) (each node must be visited at least once) • The algorithms for pre-order and post-order traversals of BSTs are covered in a homework problem. 5 The iterative version is more efficient, in terms of space used, on most computers. Recursive-Tree-Search(x, k) 1. if (x = NIL) or (k = key[x]) then 2. return x 3. if (k < key[x] then 4. return Tree-Search (left(x), k) 5. else return Tree-Search (right(x), k) Both have running times of O(h), where h is the height of the tree. Iterative-Tree-Search(x, k) 1. while (x ≠ NIL) and (k ≠ key[x]) do 2. if k < key[x] then x ← left(x) 3. else x ← right(x) 4. return x 6 1 BST Succssor & Predecessor BST Min & Max Tree-Maximum( x) 1. while right[x] ≠ NIL do 2. x ← right[x] 3. return x Tree-Minimum( x) 1. while left[x] ≠ NIL do 2. x ← left[x] 3. return x Tree-Successor( x) 1. if right(x) ≠ NIL then 2. return Tree-Minimum(right[x]) 3. temp ← parent[x] 4. while (temp ≠ NIL and x = right(temp)) 5. x ← temp 6. temp ← parent[temp] 7. return temp o If x has a rightchild, then successor(x) is the smallest node in the subtree rooted at right(x). o If x has no rightchild, then successor(x) is the nearest ancestor of x whose left child is also an ancestor of x (or x itself) The minimum element in a BST can always be found by following left child pointers to a leaf (until a NIL left child pointer is encountered). Likewise, the maximum element can be found by following right child pointers to a leaf . o If x has a leftchild, then predecessor(x) is the largest node in the subtree rooted at left(x). o If x has no leftchild, then predecessor(x) is the nearest ancestor of x whose right child is also an ancestor of x (or x itself) Both have running times of O(h), where h is the height of the tree. Tree-Predecessorr(x) 1. if left[x]≠ NIL then 2. return Tree-Maximum(left[x]) 3. temp ← parent[x] 4. while (temp ≠ NIL and x = left[temp])) 5. x ← temp 6. temp ← parent[temp] 7. return temp 7 8 BST Successor BST Predecessor x 20 18 17 19 x 20 temp 22 21 18 25 16 25 Case where right[x] not equal to NIL x 20 19 19 21 16 25 25 Case where left[x] not equal to NIL x 20 21 22 x 18 x 23 18 17 23 20 temp 15 18 17 17 14 temp 21 temp 22 22 19 21 24 19 Cases where leftt[x] equal to NIL Cases where right[x] equal to NIL 9 BST Insert Insert(T, z) 1. y ← NIL 2. x ← root[T] 3. while x ≠ NIL do 4. y← x 5. if key[z] < key[x] 6. x ← left[x] 7. else x ← right[x] 8. parent[z] ← y 9. if y = NIL then 10. root[T] ← z 11. else if key[z] < key [y] then 12. left[y] ← z 13. else right[y] ← z 20 10 BST Delete Input is a BST T and a node z such that left[z] = right[z] = NIL 11 Delete(T, z) 1. if left[z] = NIL or right[z] = NIL then 2. y←z 3. else y ← TREE-SUCCESSOR(z) 4. if left[y] ≠ NIL then 5. x ← left[y] 6. else x ← right[y] 7. if x ≠ NIL then 8. parent[x] ← p[y] 9. if parent[y] = NIL then 10. root[T] ← x 11. else if y = left[parent[y]] then 12. left[parent[y] ← x 13. else right[parent[y]] ← x 14. if y ≠ z then 15. key[z] ← key[y] 16. copy y’s satellite data tp z 17. return y Input: BST T containing node z to be deleted. Three cases: 1) z has no children. Just remove it. 2) z has only one child. Splice out z. 3) z has two children. Splice out z’s successor y, which has at most one child, swap z and y’s data, and return y. What is running time of: Successor(x)? Predecessor(x)? Insert(T, x)? Delete(T, x)? 12 2