Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Audio power wikipedia , lookup
Ground (electricity) wikipedia , lookup
Three-phase electric power wikipedia , lookup
Power over Ethernet wikipedia , lookup
History of electric power transmission wikipedia , lookup
Stray voltage wikipedia , lookup
Current source wikipedia , lookup
Power engineering wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Surge protector wikipedia , lookup
Power inverter wikipedia , lookup
Electrical substation wikipedia , lookup
Light switch wikipedia , lookup
Voltage regulator wikipedia , lookup
Electrical ballast wikipedia , lookup
Distribution management system wikipedia , lookup
Alternating current wikipedia , lookup
Power MOSFET wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power electronics wikipedia , lookup
Mains electricity wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Buck converter wikipedia , lookup
Switched-mode power supply wikipedia , lookup
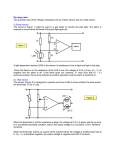
Anti-collision and Anti-braking Intelligent CAR We live in a world where everything can be controlled and operated automatically, but there are still a few important sectors in our country where automation has not been adopted or not been put to a full-fledged use, perhaps because of several reasons one such reason is cost. Intelligent car form an important part of the automobile sectors in our country as they can be used to grow production of such automated feature in car at low cost . Automating a CAR envisages monitoring and controlling of the climatic parameters which directly or indirectly govern saving of battery an can avoid accident condition. PWM Technique used for Anti-Braking and Anti-collision Pulse Width Modulation (PWM) is a commonly used technique for generally controlling DC power to an electrical device, made practical by modern electronic power switches. However it also finds its place in AC choppers. The average value of current supplied to the load is controlled by the switch position and duration of its state. If the On period of the switch is longer compared to its off period, the load receives comparatively higher power. Thus the PWM switching frequency has to be faster. Typically switching has to be done several times a minute in an electric stove, 120 Hz in a lamp dimmer, from few kilohertz (kHz) to tens of kHz for a motor drive. Switching frequency for audio amplifiers and computer power supplies is about ten to hundreds of kHz. The ratio of the On time to the time period of the pulse is known as duty cycle. If the duty cycle is low, it implies low power. The power loss in the switching device is very low, due to almost negligible amount of current flowing in the Off state of the device and negligible amount of voltage drop in its off state. Digital controls also use PWM technique. PWM has also been used in certain communication systems where its duty cycle has been used to convey information over a communications channel. Power delivery PWM can be used to adjust the total amount of power delivered to a load without losses normally incurred when a power transfer is limited by resistive means. The drawbacks are the pulsations defined by the duty cycle, switching frequency and properties of the load. With a sufficiently high switching frequency and, when necessary, using additional passive electronic filters the pulse train can be smoothed and average analogue waveform recovered. High frequency PWM control systems can be easily implemented using semiconductor switches. As has been already stated above almost no power is dissipated by the switch in either on or off state. However, during the transitions between on and off states both voltage and current are non-zero and thus considerable power is dissipated in the switches. Luckily, the change of state between fully on and fully off is quite rapid (typically less than 100 nanoseconds) relative to typical on or off times, and so the average power dissipation is quite low compared to the power being delivered even when high switching frequencies are used. TRANSDUCERS A transducer is a device which measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument. Monitoring and controlling of a CARs environment involves sensing the changes occurring inside it which can influence the rate of growth in plants. The parameters which are of importance are the temperature inside the CAR also touch, water, the illumination etc. Since all these parameters are interlinked, a closed loop (feedback) control system is employed in monitoring it. The sensors used in this system are: 1. Water Sensor(Transistor amplifier) 2. Light Sensor ( LDR (Light Dependent Resistor) ) 3. Temperature Sensor 4.Touch Sensor. Water SENSOR Features of the Water sensor: 1.The circuit designed uses a 5V supply, fixed resistance of 100Ω, variable resistance of 10ΚΩ, two copper leads as the sensor probes, 2N222N/BC548 transistor 2.It gives a voltage output corresponding to the conductivity of the two point on CAR if raining. 3.The conductivity depends upon the amount of water present on the CAR . 4.The voltage output is taken at the transmitter which is connected to a variable resistance. This variable resistance is used to adjust the sensitivity of the sensor. Fig.Soil Moisture Sensor Functional description of Soil moisture sensor: The two copper leads act as the sensor probes. They are connected on the Front and Rear glass of the CAR whose water content is under test. Case#1: Dry condition- The probes are placed dry conditions on the glass. As there is no conduction path between the two copper leads the sensor circuit remains open. The voltage output of the emitter in this case ranges from 0 to 0.5V. Case#2: Excess water condition- With the increase in water content beyond the level, the conductivity increases drastically and a steady conduction path is established between the two sensor leads and the voltage output from the sensor increases no further beyond a certain limit. The maximum possible value for it is not more than 4.2V to 5.0V. LIGHT SENSOR Light Dependent Resistor (LDR) also known as photoconductor or photocell, is a device which has a resistance which varies according to the amount of light falling on its surface. Since LDR is extremely sensitive in visible light range, it is well suited for the proposed application. Fig. 3.2 Light Dependent Resistor Features of the light sensor: The Light Dependent Resistor (LDR) is made using the semiconductor Cadmium Sulphide (CdS). The light falling on the brown zigzag lines on the sensor causes the resistance of the device to fall. This is known as a negative coefficient. There are some LDRs that work in the opposite way i.e. their resistance increases with light (called positive coefficient). The resistance of the LDR decreases as the intensity of the light falling on it increases. Incident photons drive electrons from the valence band into the Conduction Band Light Dependent Resistor Fig. Structure of a Light Dependent Resistor, showing Cadmium Sulphide track and an atom to illustrate electrons in the valence and conduction bands An LDR and a normal resistor are wired in series across a voltage, as shown in the circuit below. Depending on which is tied to the 5V and which to 0V, the voltage at the point between them, call it the sensor node, will either rise or fall with increasing light. If the LDR is the component tied directly to the 5V, the sensor node will increase in voltage with increasing light The LDR's resistance can reach 10 k ohms in dark conditions and about 100 ohms in full brightness. Fig.Light Sensor The circuit used for sensing light in our system uses a 10 kΩ fixed resistor which istied to +5V. Hence the voltage value in this case decreases with increase in light intensity levels of light intensity corresponding to the four conditions- Optimum, dim, dark and night. TEMPERATURE SENSOR National Semiconductor s LM35 IC has been used for sensing the temperature It is an integrated circuit sensor that can be used to measure temperature with an 0electrical output proportional to the temperature (in oC). The temperature can be measured more accurately with it than using a thermistor. The sensor circuitry is sealed and not subject to oxidation, etc. The sensor node voltage is compared with the threshold voltages for different Fig.Temperature Sensor LM35 Features: • Calibrated directly in ° Celsius (Centigrade) • Linear + 10.0 mV/°C scale factor • 0.5°C accuracy guaranteed (at +25°C) • Rated for full −55° to +150°C range • Suitable for remote applications • Low cost due to wafer-level trimming • Operates from 4 to 30 volts • Less than 60 μA current drain • Low self-heating, 0.08°C in still air • Nonlinearity only ±1⁄4°C typical Functional description: • The sensor has a sensitivity of 10mV / ˚C. • The output of LM35 is amplified using a LM324 single power supply (+5V) op-amp. • The op-amp is designed to have a gain of 5. • The circuitry measures temperatures with a resolution of up to 0.5 degree Celsius. • The output voltage is converted to temperature by a simple conversion factor. The general equation used to convert output voltage to temperature is: Temperature (˚C) = (Vout * 100 ) / 5 ˚C So if Vout is 5V, then, Temperature = 100 ˚C • The output voltage varies linearly with temperature. Touch Sensor Touch Sensing Circuit This kit combines a Touch Switch and a Touch Plate all together in the same . In the Touch Switch two leads must be shorted together by your finger touching them. In the Touch Plate only one plate needs to be touched. The Touch Switch only needs a battery to activate It but the Touch Plate requires a mains power supply. A Relay rated at 240V Is Included with the kit o that you may use to switch a light r other mains appliance. To use the relay you must use a 12V supply taken from a mains power supply. Note: The use of the Relay to switch 220V supply with this project MUST use the correct boxes and connectors to protect you and anyone else who uses the kit. The kit is constructed on a single- sided printed circuit board (PCB). A computer aided design program is used to design the board. Circuit Description The main part of the circuit is the two NAND gates of the 4011 IC which are connected as a flip-flop. Pins 9 and 13 are the ON and OFF contacts. The two gates are connected to the positive rail by the two 1OM resistors. Shorting one of the gates with the ground rail by touching it (this is equivalent to connecting about 50K between the gate and ground) FLIPs the output to that state. Shorting out the other contact FLOPs it back again. The output of the flip-flop drives a transistor connected as a switch. it switches an LED and a relay. The relay Is rated to switch 24W. Connecting the two 1K resistors connects the other two NAND gates of the IC Into the flip-flop and makes it much more sensitive to touch. The touch plate may in fact work with only the first two gates connected. But, it will be much more sensitive with all four gates connected as a flip-flop. The Touch Switch waits by capacitive pickup of the mains hum. When the contact Is touched body capacitance picking up general RF in the air is enough to short the plate to ground. Because the touch plate uses mains hum as it method of shorting the gate to ground a mains connected power supply must be used to supply power to the switch. A battery will not work. The 4011 is a quad (4,2) Input, NAND gate. The data sheet is included with this documentation. Obstacle Detector This circuit has two stages: a transmitter unit and a receiver unit. The transmitter unit consists of an infrared LED and its associated circuitry. IR TRANSMITTER The IR LED emitting infrared light is put on in the transmitting unit. To generate IR signal, 555 IC based astable multivibrator is used. Infrared LED is driven through transistor BC 548. IC 555 is used to construct an astable multivibrator which has two quasi-stable states. It generates a square wave of frequency 38kHz and amplitude 5Volts. It is required to switch ‘ON’ the IR LED. IR RECEIVER: The receiver unit consists of a sensor and its associated circuitry. In receiver section, the first part is a sensor, which detects IR pulses transmitted by IR-LED. Whenever a train crosses the sensor, the output of IR sensor momentarily transits through a low state. As a result the monostable is triggered and a short pulse is applied to the port pin of the 8051 microcontroller. On receiving a pulse from the sensor circuit, the controller activates the circuitry required for closing and opening of the gates and for track switching. The IR receiver circuit is shown in the figure below. Circuit Diagram