Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
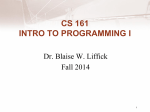
2.05•10-6 X” C H C Y” 3.05•10-6 χC-C (σ) Set of 6 Centers Z” 3.05•10-6 3.41•10-6 Y” χC-H (σ) H Z” X” 4.21•10-6 C 4.21•10-6 Set of 6 Centers 10.8•10-6 Y” H ” Z -6.5•10-6 C X” Set of 6 Centers 7.9•10-6 0.0•10-6 Y” χC(delocalized π contribution) At ring center Z X” ” One set only 0.0•10-6 -33.0•10-6 -9.35•10-6 C -9.35•10-6 χ⊥C-C 3.05x10-6 -9.35•10-6 Set of 6 Centers Y χ||C-C 2.05x10-6 0.6062 X X 1.2124 χ⊥C-C, ⊥mol_plane 3.05x10-6 1.05 Z 1 H XY 2 H X 3H X H6 1 2 6 3 3 5 3 Z 4 3 C-H bond distance=1.087 A⁰ C-C bond length= 1.4A⁰ Angle C-C-C =120⁰ Angle C-C-H= 120⁰ X3 X H X 5 3 H 4X 3 The (locally) diagonal Tensors (in their respective X”,Y”,Z” frames) of the various parts of Benzene are all to be transformed to a common Molecular axis system X,Y,Z. The transformation matrices are obtained with the corresponding direction cosines. Consider the C-C (σ) contribution of C-C (1-2); all the green dots represent the various local principal axis system of the 6 different C-C bond susceptibilities. The C-C axis is the X” axis. Thus rotating the X” of the C-C (1-2) in the molecular plane, by 30⁰ in the negative sense, by -30⁰, the X” becomes collinear with and along the X axis of the molecular system. Since all the axes system are Right handed, rotating the C-C (1-2) PAS system about the corresponding Z” axis, the C-C (1-2) PAS would coincide with Molecular Axis system. Consider the coordinates of the origin of the X”,Y”,Z” axis system for the C-C (2-1) bond. The origin is at C atom No.2. For that X”,Y”,Z” frame of reference at C2, the coordinates are (0,0,0). The same C2 atom coordinates in the Molecular Axes System X,Y,Z are (-1.2124, 0.7,0). Thus the transforming the coordinate (of the location of dipole placed at the center of C2-C1) bond from X”, Y”,Z” reference system (0.7,0,0) to X,Y,Z system requires first to subject the coordinate set 0.7,0,0 to a rotation corresponding to -30⁰ of the axis system about Z”, and then shift the coordinates corresponding to the shifted origin. Conventionally in matrix notation the coordinates of a vector are written as column vector, thus the radius vector 0.7,0,0 can be written as Since this is column vector according to Matrix multiplication rule, this being the operand (the vector to be transformed) will be on the RHS of the operator symbol, , chosen here for the matrix multiplication, the elementary steps cumulatively called transformation. Thus the first step is to rotate the coordinate system by -30⁰ and find the newly assigned values to this column vector. This transforming matrix consists of the direction cosines of the X”,Y”,Z” axes with X,Y,Z. Angle X”, X is -30⁰ and so is angle Y”, Y. since it is rotation about Z”, perpendicular to molecular plane the situation that both Z”, and Z are perpendicular to the same molecular plane makes the angle Z”,Z equal to 0. The Direction Cosines, DCs, of X”, with X, Y, and Z would be as follows: DC of X” with X is Cos -30⁰; of X” with Y is Cos 60⁰, of X” with Z is Cos -90⁰. Similarly for Y”, the DCs with X, Y, Z would be Cos -120⁰, Cos -30⁰, Cos 90⁰. For Z” with X, Y, Z would be Cos -90⁰, Cos 90⁰, Cos 0⁰. = To this values obtained after rotation the shift in the origin should be affected. The origin in X”, Y”, Z” system has values 0, 0, 0. This point has in the X, Y, Z system has values (-1.2124, 0.7, 0). Since a point 0,0,0 becomes (-1.2124, 0.7,0), all the points in the X”, Y”, Z”after appropriate rotation must be added to the set (-1.2124, 0.7,0) to account for shift of origin. + = Transforming a TENSOR of 3x3 matrix, unlike a column vector would require left multiplication as above followed by a right multiplication with the transpose of the above matrix of DCs. = Consider the C-C (σ) contribution of C-C (2-3); = Coordinates of the origin of X”, Y”, Z” system at C3 expressed in X, Y, Z system are (-1.2124, -0.7, 0) Coordinates of the midpoint of C2-C3 bond in X”, Y”, Z” are (0.7,0, 0) in that local X”, Y”, Z” system. First is the Coordinate transformation for rotation: = add origin shift = Transforming Susceptibility tensors = = Consider the C-C (σ) contribution of C-C (3-4); = = Consider the C-C (σ) contribution of C-C (4-5); = = Consider the C-C (σ) contribution of C-C (5-6); = = Consider the C-C (σ) contribution of C-C (6-1); = = C-C (1-2); C-C (2-3); C-C (3-4); C-C (4-5); C-C (5-6); C-C (6-1) Consider the C-C (σ) contribution C-C (2-3); C-C (1-2); 2.2999 -0.4330 0.0000 -0.4330 2.7999 0.0000 0.0000 0.0000 3.0500 C-C (3-4); 2.2999 0.4330 0.0000 0.0000 2.0500 0.0000 0.0000 0.0000 3.0500 C-C (4-5); 0.4330 2.7999 0.0000 0.0000 0.0000 3.0500 2.2999 -0.4330 0.0000 -0.4330 2.7999 0.0000 0.0000 0.0000 3.0500 C-C (6-1); C-C (5-6); 3.0500 0.0000 0.0000 3.0500 0.0000 0.0000 0.0000 2.0500 0.0000 0.0000 0.0000 3.0500 2.2999 0.4330 0.0000 0.4330 2.7999 0.0000 0.0000 0.0000 3.0500 Consider the C-H (σ) contribution 1 H XY 2 H X 3H X H6 1 2 6 3 3 5 3 Z 4 3 C-H bond distance=1.087 A⁰ C-C bond length= 1.4A⁰ Angle C-C-C =120⁰ Angle C-C-H= 120⁰ X3 X H X 5 3 H 4X 3 3.41•10-6 Y” χC-H (σ) H Z” 4.21•10 C1-H1 = X” C -6 Set of 6 Centers 4.21•10-6 C2-H2 = = C3-H3 = C4-H4 = C5-H5 = C6-H6 = 1 H XY 2 H X H6 1 2 6 X3 X C-H bond distance=1.087 A⁰ C-C bond length= 1.4A⁰ Angle C-C-C =120⁰ Angle C-C-H= 120⁰ χ⊥C-C 3.05x10-6 Y χ||C-C 2.05x10-6 0.6062 X X 1.2124 1.05 χ⊥C-C, ⊥mol_plane 3.05x10-6 Z Coordinates of C atoms Coordinates of C atoms C1 =90⁰ C2 =150⁰ C3 =210⁰ C4 =270⁰ C5 =330⁰ C6 =390⁰≡30⁰ 1.4A⁰ 1.4A⁰ 1.4A⁰ 1.4A⁰ 1.4A⁰ 1.4A⁰ 0.0000 A⁰ -1.2124 A⁰ -1.2124 A⁰ 0.0000A⁰ 1.2124A⁰ 1.2124A⁰ 1.4000A⁰ 0.7000A⁰ -0.7000A⁰ -1.4000A⁰ -0.7000A⁰ 0.7000A⁰ 0.0000 A⁰ 0.0000 A⁰ 0.0000 A⁰ 0.0000 A⁰ 0.0000 A⁰ 0.0000 A⁰ Midpoints of Cn+1-Cn dm origin -0.6062, 1.0500, 0.0000 [C2-C1] -1.2124, 0.0000, 0.0000 [C3-C2] -0.6062,-1.0500, 0.0000[C4-C3] 0.6062,-1.0500, 0.0000[C5-C4] 1.2124, 0.0000, 0.0000[C6-C5] 0.6062, 1.0500, 0.0000[C1-C6] Midpoint of C-H, location of Dipole, DM origin 1.4+0.5(1.087)=1.9435 Midpoint of C-H, location of Dipole, DM origin 0.0000 A⁰ 1.9435 A⁰ 0.0000 A⁰ -1.6831 A⁰ 0.9718 A⁰ 0.0000 A⁰ -1.6831 A⁰ -0.9718A⁰ 0.0000 A⁰ 0.0000A⁰ -1.9435A⁰ 0.0000 A⁰ 1.6831A⁰ -0.9718A⁰ 0.0000 A⁰ 1.6831A⁰ 0.9718A⁰ 0.0000 A⁰ 1.9435 A⁰ C1-H1 =90⁰ 1.9435 A⁰ C2 =150⁰ 1.9435 A⁰ C3 =210⁰ 1.9435 A⁰ C4 =270⁰ 1.9435 A⁰ C5 =330⁰ 1.9435 A⁰ C6 =390⁰≡30⁰ Proton Coordinates 1.4+1.087=2.4870 Proton Coordinates 0.0000 A⁰ 2.4870A⁰ 0.0000 A⁰ -2.1538 A⁰ 1.2435A⁰ 0.0000 A⁰ -2.1538 A⁰ -1.2435A⁰ 0.0000 A⁰ 0.0000A⁰ -2.4870A⁰ 0.0000 A⁰ 2.1538 A⁰ -1.2435A⁰ 0.0000 A⁰ 2.1538 A⁰ 1.2435A⁰ 0.0000 A⁰ 2.4870A⁰ 2.4870A⁰ 2.4870A⁰ 2.4870A⁰ 2.4870A⁰ 2.4870A⁰ C1-H1 =90⁰ C2 =150⁰ C3 =210⁰ C4 =270⁰ C5 =330⁰ C6 =390⁰≡30⁰ 1 H XY 2 H X 3H X H6 1 2 6 3 3 5 3 Z 4 3 H 4X 3 X3 X H X 5 3 C-H bond distance=1.087 A⁰ C-C bond length= 1.4A⁰ Angle C-C-C =120⁰ Angle C-C-H= 120⁰