
Mathematics 308 — Geometry Chapter 2. Elementary coordinate
... Using a computer to produce pictures requires translating geometry to numbers, which is carried out through a coordinate system. Through nearly all of this course, the coordinate systems we use will have the property that the x and y axes are perpendicular to each other and measured in the same unit ...
... Using a computer to produce pictures requires translating geometry to numbers, which is carried out through a coordinate system. Through nearly all of this course, the coordinate systems we use will have the property that the x and y axes are perpendicular to each other and measured in the same unit ...

Lesson 16-1
... Kite: Is a quadrilateral whose four sides can be grouped into two pairs of equal-length sides that are adjacent to each other. ...
... Kite: Is a quadrilateral whose four sides can be grouped into two pairs of equal-length sides that are adjacent to each other. ...
Unit 1 Conjectures
... Angle Bisector Conjecture: If a point is on the bisector of an angle, then it is __________________ from the sides of the angle. ...
... Angle Bisector Conjecture: If a point is on the bisector of an angle, then it is __________________ from the sides of the angle. ...


Section 3.1 - GEOCITIES.ws
... 1. Determine the horizontal distance for the given point. That is, determine the first number in the ordered pair. Starting at the given point, imagine dropping a vertical line up or down to the x-axis. Determine where this vertical line intersects the x-axis. - If this point on the x-axis lies to t ...
... 1. Determine the horizontal distance for the given point. That is, determine the first number in the ordered pair. Starting at the given point, imagine dropping a vertical line up or down to the x-axis. Determine where this vertical line intersects the x-axis. - If this point on the x-axis lies to t ...

Blank Notes Packet
... Two forces of 15 and 22 newtons act on a point in the plane. (A newton is a unit of force that equals .225 lb.) If the angle between the forces is 100°, find the magnitude of the resultant vector. ...
... Two forces of 15 and 22 newtons act on a point in the plane. (A newton is a unit of force that equals .225 lb.) If the angle between the forces is 100°, find the magnitude of the resultant vector. ...
2 Force Vectors
... Addition of Several Forces If more than two forces are to be added, successive application of the parallelogram law can be carried out in order to obtain a resultant force. Example: If three forces F1, F2 and F3 act at a point O, we can find the resultant of any two forces and then add it to the th ...
... Addition of Several Forces If more than two forces are to be added, successive application of the parallelogram law can be carried out in order to obtain a resultant force. Example: If three forces F1, F2 and F3 act at a point O, we can find the resultant of any two forces and then add it to the th ...
Part A
... PART Q On the accompanying grid, draw and label quadrilateral ABCD with points A 1,2 , B 6,1 , C 7,6 , and D 3,7 . On the same set of axes, plot and label quadrilateral A’B’C’D’, the reflection of quadrilateral ABCD in the y-axis. Determine the area, in square units, of quadrilateral A’B’ ...
... PART Q On the accompanying grid, draw and label quadrilateral ABCD with points A 1,2 , B 6,1 , C 7,6 , and D 3,7 . On the same set of axes, plot and label quadrilateral A’B’C’D’, the reflection of quadrilateral ABCD in the y-axis. Determine the area, in square units, of quadrilateral A’B’ ...


Chapter 2
... Now using the coordinate direction angles, we can get UG, and determine G from the formula: G = 80UG lb. G = {80 ( cos (111°) i + cos (69.3°) j + cos (30.22°) k )} lb G = {- 28.67 i + 28.28 j + 69.13 k } lb Finally, find the resultant vector R = F + G or R = {6.69 i – 7.08 j + 156 k} lb ...
... Now using the coordinate direction angles, we can get UG, and determine G from the formula: G = 80UG lb. G = {80 ( cos (111°) i + cos (69.3°) j + cos (30.22°) k )} lb G = {- 28.67 i + 28.28 j + 69.13 k } lb Finally, find the resultant vector R = F + G or R = {6.69 i – 7.08 j + 156 k} lb ...

TWO CAMERAS 2009
... The central projection is may be the most used projection because of its closeness to the human perceptions. Although the laws of the central projection and perspective are known for many years, the mathematicians investigate them now in the framework of the projective, affine and Euclidian geometry ...
... The central projection is may be the most used projection because of its closeness to the human perceptions. Although the laws of the central projection and perspective are known for many years, the mathematicians investigate them now in the framework of the projective, affine and Euclidian geometry ...

2D Geometry Points, Distances, and Directions
... Rotations are another fundamental concept of 2D computational geometry. The good news is that only one rotation, the left rotation by 90 degrees, needs to be used very often. Nevertheless, understanding rotations is the easy way to understand other concepts such as the scalar product of vectors defin ...
... Rotations are another fundamental concept of 2D computational geometry. The good news is that only one rotation, the left rotation by 90 degrees, needs to be used very often. Nevertheless, understanding rotations is the easy way to understand other concepts such as the scalar product of vectors defin ...
x - Purdue Physics
... The examples we examined briefly during recitation yesterday were intended to remind us that geometry is about spatial properties like lengths of line segments and angles between them that are independent of any coordinate system that we might choose to use to represent the segments. They were also ...
... The examples we examined briefly during recitation yesterday were intended to remind us that geometry is about spatial properties like lengths of line segments and angles between them that are independent of any coordinate system that we might choose to use to represent the segments. They were also ...
Geometry Standards with Learning Targets
... Students will be able to: a) Find and/or graph an image of a translation on the coordinate plane and write the coordinates of the transformed image using prime notation. b) Write a rule to describe a translation. c) Reflect a figure across either axis or a horizontal/vertical line. Write the coordin ...
... Students will be able to: a) Find and/or graph an image of a translation on the coordinate plane and write the coordinates of the transformed image using prime notation. b) Write a rule to describe a translation. c) Reflect a figure across either axis or a horizontal/vertical line. Write the coordin ...

Midterm Review Packet Name: What is the slope of a line
... after the composition of transformations defined by ry=x followed ...
... after the composition of transformations defined by ry=x followed ...
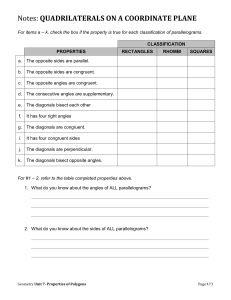
The diagonals are congruent.
... Notes: QUADRILATERALS ON A COORDINATE PLANE For items a – k, check the box if the property is true for each classification of parallelograms. CLASSIFICATION PROPERTIES a. ...
... Notes: QUADRILATERALS ON A COORDINATE PLANE For items a – k, check the box if the property is true for each classification of parallelograms. CLASSIFICATION PROPERTIES a. ...
Grade 5 Unit Picturing Polygons
... 1. Use a pair of perpendicular number lines, called axes, to define a coordinate system, with the intersection of the lines (the origin) arranged to coincide with the 0 on each line and a given point in the plane located by using an ordered pair of numbers, called its coordinates. Understand that th ...
... 1. Use a pair of perpendicular number lines, called axes, to define a coordinate system, with the intersection of the lines (the origin) arranged to coincide with the 0 on each line and a given point in the plane located by using an ordered pair of numbers, called its coordinates. Understand that th ...

Chapter 7
... Every vector can be expressed in terms of i & j in the following manner:
< a, b > = a i + b j
since this means a< 1, 0 > + b< 0, 1 >
which is equivalent to < a, 0 > + < 0, b >
which is equivalent to < a + 0 , 0 + b > or < a, b >
The unit vector is important in applied sciences such as physics ...
... Every vector
Curvilinear coordinates

In geometry, curvilinear coordinates are a coordinate system for Euclidean space in which the coordinate lines may be curved. These coordinates may be derived from a set of Cartesian coordinates by using a transformation that is locally invertible (a one-to-one map) at each point. This means that one can convert a point given in a Cartesian coordinate system to its curvilinear coordinates and back. The name curvilinear coordinates, coined by the French mathematician Lamé, derives from the fact that the coordinate surfaces of the curvilinear systems are curved.Well-known examples of curvilinear coordinate systems in three-dimensional Euclidean space (R3) are Cartesian, cylindrical and spherical polar coordinates. A Cartesian coordinate surface in this space is a plane; for example z = 0 defines the x-y plane. In the same space, the coordinate surface r = 1 in spherical polar coordinates is the surface of a unit sphere, which is curved. The formalism of curvilinear coordinates provides a unified and general description of the standard coordinate systems.Curvilinear coordinates are often used to define the location or distribution of physical quantities which may be, for example, scalars, vectors, or tensors. Mathematical expressions involving these quantities in vector calculus and tensor analysis (such as the gradient, divergence, curl, and Laplacian) can be transformed from one coordinate system to another, according to transformation rules for scalars, vectors, and tensors. Such expressions then become valid for any curvilinear coordinate system.Depending on the application, a curvilinear coordinate system may be simpler to use than the Cartesian coordinate system. For instance, a physical problem with spherical symmetry defined in R3 (for example, motion of particles under the influence of central forces) is usually easier to solve in spherical polar coordinates than in Cartesian coordinates. Equations with boundary conditions that follow coordinate surfaces for a particular curvilinear coordinate system may be easier to solve in that system. One would for instance describe the motion of a particle in a rectangular box in Cartesian coordinates, whereas one would prefer spherical coordinates for a particle in a sphere. Spherical coordinates are one of the most used curvilinear coordinate systems in such fields as Earth sciences, cartography, and physics (in particular quantum mechanics, relativity), and engineering.