

02 Dot Product
... • Any non-zero vector v can be turned into a unit vector by dividing it by its own lengths: we write v̂ = v/||v||. This is a vector in the same direction as v, but having unit length. In fact, we call v̂ the direction of v. • Conversely, we can multiply both sides of the equation above by ||v||, to ...
... • Any non-zero vector v can be turned into a unit vector by dividing it by its own lengths: we write v̂ = v/||v||. This is a vector in the same direction as v, but having unit length. In fact, we call v̂ the direction of v. • Conversely, we can multiply both sides of the equation above by ||v||, to ...

Handout #5 AN INTRODUCTION TO VECTORS Prof. Moseley
... = [3/5, 4/5] . To make vectors in ú more applicable to two dimensional geometry we can introduce the concept of an equivalence relation and equivalence classes. We say that an arbitrary directed line segment in the p lane is equivalent to a geometrical vector in G if it has the same direction and ma ...
... = [3/5, 4/5] . To make vectors in ú more applicable to two dimensional geometry we can introduce the concept of an equivalence relation and equivalence classes. We say that an arbitrary directed line segment in the p lane is equivalent to a geometrical vector in G if it has the same direction and ma ...
Geometry Review Study Pack The following equations may be
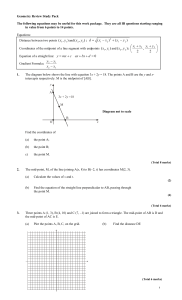
... The diagram below shows the line with equation 3x + 2y = 18. The points A and B are the y and xintercepts respectively. M is the midpoint of [AB]. ...
... The diagram below shows the line with equation 3x + 2y = 18. The points A and B are the y and xintercepts respectively. M is the midpoint of [AB]. ...


Pg. 27 #5-8 - TeacherWeb
... c. How many possible segments parallel to either the y-axis or the x-axis ...
... c. How many possible segments parallel to either the y-axis or the x-axis ...

Terms - XiTCLUB
... Scalar - An ordinary number; whereas vectors have direction and magnitude, scalars have only magnitude. The scalars we will be dealing with will all be real numbers, but other kinds of numbers can also be scalars. 5 miles represents a scalar. Unit vector - A vector whose length is one. The unit vect ...
... Scalar - An ordinary number; whereas vectors have direction and magnitude, scalars have only magnitude. The scalars we will be dealing with will all be real numbers, but other kinds of numbers can also be scalars. 5 miles represents a scalar. Unit vector - A vector whose length is one. The unit vect ...

Lecture 11: High Dimensional Geometry, Curse of Dimensionality, Dimension Reduction
... dimensions. We discretise the cube into smaller cubes of size ε. Then there are 1/ε5 smaller cubes; these can be the buckets. This is simplistic; more complicated schemes have been constructed. Things get even more interesting when we are interested in `1 -distance. ...
... dimensions. We discretise the cube into smaller cubes of size ε. Then there are 1/ε5 smaller cubes; these can be the buckets. This is simplistic; more complicated schemes have been constructed. Things get even more interesting when we are interested in `1 -distance. ...

Vectors 1 - Core 4 Revision 1. The lines L and M have vector
... The lines l1 and l2 have vector equations r = (2 + λ)i + (–2 – λ)j + (7 + λ)k and r = (4 + 4µ)i + (26 + 14µ)j + (–3 – 5µ)k respectively, where λ and µ are scalar parameters. (a) ...
... The lines l1 and l2 have vector equations r = (2 + λ)i + (–2 – λ)j + (7 + λ)k and r = (4 + 4µ)i + (26 + 14µ)j + (–3 – 5µ)k respectively, where λ and µ are scalar parameters. (a) ...

Error Resilience Coding
... a.b = |a||b|cosθ Hence a.b = 0 implies two vectors are orthogonal. Further a.b > 0 we can say that they are in the same general direction and a.b < 0 they are in the opposite general direction. Projection of vector b on a = a.b / |a| Vector Projection of vector b on a = (a.b / |a|) ( a / |a| ...
... a.b = |a||b|cosθ Hence a.b = 0 implies two vectors are orthogonal. Further a.b > 0 we can say that they are in the same general direction and a.b < 0 they are in the opposite general direction. Projection of vector b on a = a.b / |a| Vector Projection of vector b on a = (a.b / |a|) ( a / |a| ...

Section 6.7: Proof Using Coordinate Geometry
... 1.) The midsegment of a trapezoid is ________________ to the bases. 2.) The length of the midsegment of a trapezoid is half the sum of the lengths of the bases. ...
... 1.) The midsegment of a trapezoid is ________________ to the bases. 2.) The length of the midsegment of a trapezoid is half the sum of the lengths of the bases. ...

GR5_Geometry_Unpacking_Standards
... Use a pair of perpendicular number lines, called axes, to define a coordinate system, with the intersection of the lines (the origin) arranged to coincide with the 0 on each line and a given point in the plane located by using an ordered pair of numbers, called its coordinates. Understand that the f ...
... Use a pair of perpendicular number lines, called axes, to define a coordinate system, with the intersection of the lines (the origin) arranged to coincide with the 0 on each line and a given point in the plane located by using an ordered pair of numbers, called its coordinates. Understand that the f ...


Learning Target Unit Sheet Course: Geometry Chapter 6: Polygons
... Learning Targets (I Can’s) I can find the sum of the measures of the interior angles of a polygon. I can find the sum of the measures of the exterior angles of a polygon. I can verify and use properties of trapezoids and kites. I can use relationships among sides and angles of parallelograms. I can ...
... Learning Targets (I Can’s) I can find the sum of the measures of the interior angles of a polygon. I can find the sum of the measures of the exterior angles of a polygon. I can verify and use properties of trapezoids and kites. I can use relationships among sides and angles of parallelograms. I can ...

1. Consider the subset S {x, y, z ∈ R3 : x y − 1 0 and z 0} of R 3
... (c) S does not contain more than two linearly independent vectors, (d) S contains a basis of R3 . 2. Consider the vectors u = i, v = i + 2j, w = i + j + 3k in R3 . Then (a) {u, v, w} is a basis of R3 , (b) w is parallel to the cross product u × v, (c) u, v, w are coplanar (that is, not linearly inde ...
... (c) S does not contain more than two linearly independent vectors, (d) S contains a basis of R3 . 2. Consider the vectors u = i, v = i + 2j, w = i + j + 3k in R3 . Then (a) {u, v, w} is a basis of R3 , (b) w is parallel to the cross product u × v, (c) u, v, w are coplanar (that is, not linearly inde ...

5-4
... angles have equal measure. I do not have a right angle. All my sides are congruent. rhombus ...
... angles have equal measure. I do not have a right angle. All my sides are congruent. rhombus ...

Curvilinear coordinates

In geometry, curvilinear coordinates are a coordinate system for Euclidean space in which the coordinate lines may be curved. These coordinates may be derived from a set of Cartesian coordinates by using a transformation that is locally invertible (a one-to-one map) at each point. This means that one can convert a point given in a Cartesian coordinate system to its curvilinear coordinates and back. The name curvilinear coordinates, coined by the French mathematician Lamé, derives from the fact that the coordinate surfaces of the curvilinear systems are curved.Well-known examples of curvilinear coordinate systems in three-dimensional Euclidean space (R3) are Cartesian, cylindrical and spherical polar coordinates. A Cartesian coordinate surface in this space is a plane; for example z = 0 defines the x-y plane. In the same space, the coordinate surface r = 1 in spherical polar coordinates is the surface of a unit sphere, which is curved. The formalism of curvilinear coordinates provides a unified and general description of the standard coordinate systems.Curvilinear coordinates are often used to define the location or distribution of physical quantities which may be, for example, scalars, vectors, or tensors. Mathematical expressions involving these quantities in vector calculus and tensor analysis (such as the gradient, divergence, curl, and Laplacian) can be transformed from one coordinate system to another, according to transformation rules for scalars, vectors, and tensors. Such expressions then become valid for any curvilinear coordinate system.Depending on the application, a curvilinear coordinate system may be simpler to use than the Cartesian coordinate system. For instance, a physical problem with spherical symmetry defined in R3 (for example, motion of particles under the influence of central forces) is usually easier to solve in spherical polar coordinates than in Cartesian coordinates. Equations with boundary conditions that follow coordinate surfaces for a particular curvilinear coordinate system may be easier to solve in that system. One would for instance describe the motion of a particle in a rectangular box in Cartesian coordinates, whereas one would prefer spherical coordinates for a particle in a sphere. Spherical coordinates are one of the most used curvilinear coordinate systems in such fields as Earth sciences, cartography, and physics (in particular quantum mechanics, relativity), and engineering.