Network Routing Algorithms
... “ECHO” packet immediately. • Measure the time required for this operation. • Question: Should we measure just the time it takes to transmit the packet, or should we include the time that the packet waits in the queue? ...
... “ECHO” packet immediately. • Measure the time required for this operation. • Question: Should we measure just the time it takes to transmit the packet, or should we include the time that the packet waits in the queue? ...
Network Routing Algorithms
... “ECHO” packet immediately. • Measure the time required for this operation. • Question: Should we measure just the time it takes to transmit the packet, or should we include the time that the packet waits in the queue? ...
... “ECHO” packet immediately. • Measure the time required for this operation. • Question: Should we measure just the time it takes to transmit the packet, or should we include the time that the packet waits in the queue? ...

Reinforcement Learning for Neural Networks using Swarm Intelligence
... propel towards a probabilistic median, where explorative factor, cognitive factor (local robot respective views), and social factor (global swarm wide views) are considered simultaneously, and try to merge these three factors into consistent behaviors for each robot. The exploration factor can be ea ...
... propel towards a probabilistic median, where explorative factor, cognitive factor (local robot respective views), and social factor (global swarm wide views) are considered simultaneously, and try to merge these three factors into consistent behaviors for each robot. The exploration factor can be ea ...
Preliminary review / Publisher`s description: This self
... linear programming (Chapter 6), convex optimization (Chapter 7), mixed smoothconvex optimization (Chapter 10), dynamic programming in discrete time (Chapter 11), and dynamic optimization in continuous time (Chapter 12). The following four-step procedure, conveniently adapted to each of the above fam ...
... linear programming (Chapter 6), convex optimization (Chapter 7), mixed smoothconvex optimization (Chapter 10), dynamic programming in discrete time (Chapter 11), and dynamic optimization in continuous time (Chapter 12). The following four-step procedure, conveniently adapted to each of the above fam ...
Network Routing Algorithms
... “ECHO” packet immediately. • Measure the time required for this operation. • Question: Should we measure just the time it takes to transmit the packet, or should we include the time that the packet waits in the queue? ...
... “ECHO” packet immediately. • Measure the time required for this operation. • Question: Should we measure just the time it takes to transmit the packet, or should we include the time that the packet waits in the queue? ...
Chapter 2 - William Stallings, Data and Computer
... prevents other hosts from using the queue. Active queue management can prevent this condition. Semester 1 2009-2010 ...
... prevents other hosts from using the queue. Active queue management can prevent this condition. Semester 1 2009-2010 ...

The Bowling Scheme - at www.arxiv.org.
... where the objective and constraint are interchanged. We can often solve (2.2) and its variants efficiently using standard algorithms. Remark 2.1 (Alternative programs). The optimization problem (2.2) is not the only type of convex method for signal reconstruction. Suppose that f : Rd → R is a gauge, ...
... where the objective and constraint are interchanged. We can often solve (2.2) and its variants efficiently using standard algorithms. Remark 2.1 (Alternative programs). The optimization problem (2.2) is not the only type of convex method for signal reconstruction. Suppose that f : Rd → R is a gauge, ...

Soft Sensing-Based Multiple Access for Cognitive Radio Networks
... where ℜ+Mp is the set of Mp dimensional vectors with real, non-negative elements. In a communication network, the stability of the network’s queues is a fundamental performance measure. Stability can be loosely defined as having a certain quantity of interest kept bounded. In our case, we are intere ...
... where ℜ+Mp is the set of Mp dimensional vectors with real, non-negative elements. In a communication network, the stability of the network’s queues is a fundamental performance measure. Stability can be loosely defined as having a certain quantity of interest kept bounded. In our case, we are intere ...
Prezentacja programu PowerPoint
... Problem – what is the reordering in the following cases: source ...
... Problem – what is the reordering in the following cases: source ...

A Nonlinear Programming Algorithm for Solving Semidefinite
... To answer Q1, we appeal to a theorem that posits the existence of an optimal solution X ∗ of (1) having rank r satisfying the inequality r(r + 1)/2 ≤ m. In terms of the reformulation (2), the existence of X ∗ implies the existence of some V ∗ satisfying X ∗ = V ∗ (V ∗ )T and having its last n − r co ...
... To answer Q1, we appeal to a theorem that posits the existence of an optimal solution X ∗ of (1) having rank r satisfying the inequality r(r + 1)/2 ≤ m. In terms of the reformulation (2), the existence of X ∗ implies the existence of some V ∗ satisfying X ∗ = V ∗ (V ∗ )T and having its last n − r co ...
Performance and Introduction to Queue theory
... A(t) is a Poisson process with rate l, and the time to serve each packet is exponentially distributed with rate m, then: We assume the system is in steady state, or stationary, with none time varying values. Pn is the probability that there are n customer in the queue including the one in the se ...
... A(t) is a Poisson process with rate l, and the time to serve each packet is exponentially distributed with rate m, then: We assume the system is in steady state, or stationary, with none time varying values. Pn is the probability that there are n customer in the queue including the one in the se ...
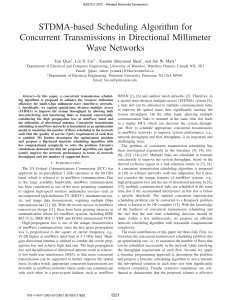
STDMA-based Scheduling Algorithm for Concurrent Transmissions
... flow i is determined by the received SIN R. The received signal power is dependent of the path loss, shadowing, multipath fading, and other wireless channel impairments. As it is difficult to obtain the instantaneous channel conditions of all flows, we consider the average link throughput which is main ...
... flow i is determined by the received SIN R. The received signal power is dependent of the path loss, shadowing, multipath fading, and other wireless channel impairments. As it is difficult to obtain the instantaneous channel conditions of all flows, we consider the average link throughput which is main ...

IOSR Journal of Electronics and Communication Engineering (IOSR-JECE)
... increasing pace, both from standardization bodies within the telecommunication community like the International Telecommunication Union (ITU) as well as on the initiative of the computer and chip industry. While the former wants to evolve existing third generation (3G) telecommunication standards li ...
... increasing pace, both from standardization bodies within the telecommunication community like the International Telecommunication Union (ITU) as well as on the initiative of the computer and chip industry. While the former wants to evolve existing third generation (3G) telecommunication standards li ...

Delay performance of CSMA in networks with bounded degree
... schemes can achieve the full throughput region under the protocol model of interference [1], [2]. Here a collection of n wireless links are considered under a conflict graph G which stipulates that no two neighbors in G may transmit simultaneously. In turn transmitting links form an independent set ...
... schemes can achieve the full throughput region under the protocol model of interference [1], [2]. Here a collection of n wireless links are considered under a conflict graph G which stipulates that no two neighbors in G may transmit simultaneously. In turn transmitting links form an independent set ...

Modeling and Simulation of HTTP Protocol in Networked Control
... It can be easily seen in the network model that any communication requires an HTTP connection between the HTTP sender (consisting of a queue and a number of sending tasks) and the HTTP receiver (consisting of a queue and a number of request/job processing tasks). Although a particular connection can ...
... It can be easily seen in the network model that any communication requires an HTTP connection between the HTTP sender (consisting of a queue and a number of sending tasks) and the HTTP receiver (consisting of a queue and a number of request/job processing tasks). Although a particular connection can ...
CHAPTER 5 – 10/12/01
... the semaphore. If the waits are done before accessing the buffer (critical section), then the producer (waiting on unused) will block if unused is zero (buffer full), and consumer (waiting on used) will block if used is zero (buffer empty). signals are done after accessing the buffer and when the pr ...
... the semaphore. If the waits are done before accessing the buffer (critical section), then the producer (waiting on unused) will block if unused is zero (buffer full), and consumer (waiting on used) will block if used is zero (buffer empty). signals are done after accessing the buffer and when the pr ...

Precondition Control and the Progression Algorithm
... to move toward filling this gap. Using the situation calculus (McCarthy 1963) as our formal framework, specifically Reiter’s situation calculus action theories (Reiter 1991; 2001), we look at planning with search control of the form used by the TLPlan and TALPlanner systems. First, we define a set o ...
... to move toward filling this gap. Using the situation calculus (McCarthy 1963) as our formal framework, specifically Reiter’s situation calculus action theories (Reiter 1991; 2001), we look at planning with search control of the form used by the TLPlan and TALPlanner systems. First, we define a set o ...
ppt
... Ben Bitdiddle’s home network connection can upload at 125,000 bytes/second. His router has a 100,000 byte first in first out buffer for packets awaiting transmission. If the buffer is completely full, how long will it take for the buffer to clear? A. 0.4 seconds B. 0.6 seconds C. 0.8 seconds D. 1 s ...
... Ben Bitdiddle’s home network connection can upload at 125,000 bytes/second. His router has a 100,000 byte first in first out buffer for packets awaiting transmission. If the buffer is completely full, how long will it take for the buffer to clear? A. 0.4 seconds B. 0.6 seconds C. 0.8 seconds D. 1 s ...

Stochastic dominance-constrained Markov decision processes
... evolution. Explicitly, Q(B| s, a) for B ∈ B(S) is the probability of visiting the set B given the state-action pair (s, a). Finally, r : K → R is a measurable reward function that depends on state-action pairs. We now describe two classes of policies for MDPs. Let Ht be the set of histories at time ...
... evolution. Explicitly, Q(B| s, a) for B ∈ B(S) is the probability of visiting the set B given the state-action pair (s, a). Finally, r : K → R is a measurable reward function that depends on state-action pairs. We now describe two classes of policies for MDPs. Let Ht be the set of histories at time ...

ccr-9501-mcquilln - Computer Communication Review
... the new algorithm, each node maintains a data base describing the delay on each network line. A shortestpath computation is run in each node which explicitly computes the minimum-delay paths (based on the delay entries in the data base) from that node to all other nodes in the network. The average d ...
... the new algorithm, each node maintains a data base describing the delay on each network line. A shortestpath computation is run in each node which explicitly computes the minimum-delay paths (based on the delay entries in the data base) from that node to all other nodes in the network. The average d ...
Problem Statement and Assumption
... Constraint (1b) guarantees a full coverage of the monitored area, such that every elementary cell is covered by at least one Active sensor. Constraint (1d) ensures that there exist at least a CH located one hop from the PN. Constraints (1e) to (1h) ensure that every Active and non-CH sensor is ...
... Constraint (1b) guarantees a full coverage of the monitored area, such that every elementary cell is covered by at least one Active sensor. Constraint (1d) ensures that there exist at least a CH located one hop from the PN. Constraints (1e) to (1h) ensure that every Active and non-CH sensor is ...

Partially Observable Markov Decision Processes with Reward
... that the reward function is known. However, with on-line (or sample path based) approaches such as reinforcement learning, it is convenient to assume that the reward at each step zt can be exactly observed, which is used to update the estimate of the value function. Because the state is completely o ...
... that the reward function is known. However, with on-line (or sample path based) approaches such as reinforcement learning, it is convenient to assume that the reward at each step zt can be exactly observed, which is used to update the estimate of the value function. Because the state is completely o ...

Sensitivity Analysis of Optimal Control Problems with Bang–Bang
... Sensitivity analysis for parametric optimal control problems has been studied extensively in the case that the control variable enters the system nonlinearly; cf., e.g., [5], [11], [12], [13]. In these papers, the basic assumption for sensitivity analysis is that the strict Legendre condition holds ...
... Sensitivity analysis for parametric optimal control problems has been studied extensively in the case that the control variable enters the system nonlinearly; cf., e.g., [5], [11], [12], [13]. In these papers, the basic assumption for sensitivity analysis is that the strict Legendre condition holds ...
Mathematical Logic 2016 Lecture 4: Normal forms
... T (I0 , X0 , X1 , O1 ) ∧ · · · ∧ T (In−1 , Xn−1 , Xn , On ) ...
... T (I0 , X0 , X1 , O1 ) ∧ · · · ∧ T (In−1 , Xn−1 , Xn , On ) ...