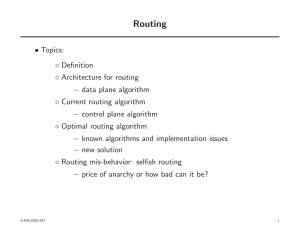
Routing
... Routing: Problem Formulation • Let nodes of network be numbered 1, . . . , n. • Let L = {(i, j) : 1 ≤ i, j ≤ n} be set of all links ◦ Cij be capacity of link (i, j) ◦ Cij = 0, if link (i, j) is not present • Let ri(j) be rate at which data is generated at node i for node j. • Let φℓi(j) be fraction ...
... Routing: Problem Formulation • Let nodes of network be numbered 1, . . . , n. • Let L = {(i, j) : 1 ≤ i, j ≤ n} be set of all links ◦ Cij be capacity of link (i, j) ◦ Cij = 0, if link (i, j) is not present • Let ri(j) be rate at which data is generated at node i for node j. • Let φℓi(j) be fraction ...

24.1 Rectangular Partitions Question
... Figure 5: Deleting Segments Inside Rectangles One thing should be paid attention to is: Line segments cannot be acrossed. ...
... Figure 5: Deleting Segments Inside Rectangles One thing should be paid attention to is: Line segments cannot be acrossed. ...

Scheduling Algorithms
... requested objects (default RR strategy). Target_oss represents the storage server calculated based on this MLML scheduling algorithm. If the target_oss and the default_oss are not the same server, we then need to consider whether it is worth of scheduling this request to the target oss as this mi ...
... requested objects (default RR strategy). Target_oss represents the storage server calculated based on this MLML scheduling algorithm. If the target_oss and the default_oss are not the same server, we then need to consider whether it is worth of scheduling this request to the target oss as this mi ...

Solving the 0-1 Knapsack Problem with Genetic Algorithms
... chromosomes encodings are binary, permutation, value, and tree encodings. For the Knapsack problem, we use binary encoding, where every chromosome is a string of bits, 0 or 1. ...
... chromosomes encodings are binary, permutation, value, and tree encodings. For the Knapsack problem, we use binary encoding, where every chromosome is a string of bits, 0 or 1. ...


The Efficient Outcome Set of a Bi-criteria Linear Programming and
... [y i , y j ] is an efficient edge of YE , otherwise ŷ ∈ {y i+1 , . . . , y j−1 }. Proof. This fact follows from the definition of Gi,j and the linear programming theory. . In the special case when y i = y 1 = y start and y j = y k = y end we will denote G = G1,k , ` = `1,k and α = α1,k . Denote by ...
... [y i , y j ] is an efficient edge of YE , otherwise ŷ ∈ {y i+1 , . . . , y j−1 }. Proof. This fact follows from the definition of Gi,j and the linear programming theory. . In the special case when y i = y 1 = y start and y j = y k = y end we will denote G = G1,k , ` = `1,k and α = α1,k . Denote by ...

O(M(N)) - Princeton CS
... Integer Division: Newton's Method (q, r) = NewtonIntegerDivision (s, t) Arbitrary precision rational x. Choose x to be unique fractional power of 2 in interval (1/2t, 1/t]. WHILE ( s – s x t t ) x 2x – tx2 ...
... Integer Division: Newton's Method (q, r) = NewtonIntegerDivision (s, t) Arbitrary precision rational x. Choose x to be unique fractional power of 2 in interval (1/2t, 1/t]. WHILE ( s – s x t t ) x 2x – tx2 ...

Stacks, Queues, and Deques
... With a linked-list representation, overflow will not happen (unless you exhaust memory, which is another kind of problem) Underflow can happen, and should be handled the same way as for an array implementation When a node is popped from a list, and the node references an object, the reference (the p ...
... With a linked-list representation, overflow will not happen (unless you exhaust memory, which is another kind of problem) Underflow can happen, and should be handled the same way as for an array implementation When a node is popped from a list, and the node references an object, the reference (the p ...
Divide and Conquer
... function DC (x) : answer if length(x) < threshold then return adhoc(x) decompose x into a sub-instances x1, x2 … xa of size n/b for i 1 to a do yi DC(xi) recombine the yi’s to get a solution y for x return y Where : adhoc(x) = is the basic algorithm for small instances a = the number of division ...
... function DC (x) : answer if length(x) < threshold then return adhoc(x) decompose x into a sub-instances x1, x2 … xa of size n/b for i 1 to a do yi DC(xi) recombine the yi’s to get a solution y for x return y Where : adhoc(x) = is the basic algorithm for small instances a = the number of division ...
inf orms O R
... relevant difference comes form our short notice assumption. For instance, without this assumption the so-called nested policies (i.e., threshold policies applied over several rounds) turn out to be optimal (Ball and Queyranne 2009). On the other hand, although sampling targets from a population for ...
... relevant difference comes form our short notice assumption. For instance, without this assumption the so-called nested policies (i.e., threshold policies applied over several rounds) turn out to be optimal (Ball and Queyranne 2009). On the other hand, although sampling targets from a population for ...

HJ2614551459
... studies dealing with comparative analysis of different clustering methods suggest that there is no general strategy which works equally well in different problem domains. However, it has been found that it is usually beneficial to run schemes that are simpler, and execute them several times, rather ...
... studies dealing with comparative analysis of different clustering methods suggest that there is no general strategy which works equally well in different problem domains. However, it has been found that it is usually beneficial to run schemes that are simpler, and execute them several times, rather ...

The Robustness-Performance Tradeoff in Markov Decision Processes
... In many decision problems the parameters of the problem are inherently uncertain. This uncertainty, termed parameter uncertainty, can be the result of estimating the parameters from a finite sample or a specification of the parameters that itself includes uncertainty. The standard approach in decisi ...
... In many decision problems the parameters of the problem are inherently uncertain. This uncertainty, termed parameter uncertainty, can be the result of estimating the parameters from a finite sample or a specification of the parameters that itself includes uncertainty. The standard approach in decisi ...


Worksheet 3 - Loyola University Chicago
... Problem 2. Consider the function f (x, y) from Problem 1 and find its absolute minimum and absolute maximum on the triangle between x = 2, y = −2, y = x − 1. Solution: First, it is a very good idea to carefully sketch the triangle. Second, look for candidates for the absolute minimum and maximum in ...
... Problem 2. Consider the function f (x, y) from Problem 1 and find its absolute minimum and absolute maximum on the triangle between x = 2, y = −2, y = x − 1. Solution: First, it is a very good idea to carefully sketch the triangle. Second, look for candidates for the absolute minimum and maximum in ...

A Priority Based Job Scheduling Algorithm in Cloud Computing
... optimization techniques. These techniques are slow and guarantee for global convergence as long as problems are small. But in cloud computing, the problems are very complex and also we need fast response environments. Thus traditional scheduling cannot guarantee for optimal solution in cloud computi ...
... optimization techniques. These techniques are slow and guarantee for global convergence as long as problems are small. But in cloud computing, the problems are very complex and also we need fast response environments. Thus traditional scheduling cannot guarantee for optimal solution in cloud computi ...

1 Divide and Conquer with Reduce
... to believe that any such algorithms will have to keep a cumulative “sum,” computing each output value by relying on the “sum” of the all values before it. In this lecture, we’ll see a technique that allow us to implement scan in parallel. Let’s talk about another algorithmic technique: contraction. ...
... to believe that any such algorithms will have to keep a cumulative “sum,” computing each output value by relying on the “sum” of the all values before it. In this lecture, we’ll see a technique that allow us to implement scan in parallel. Let’s talk about another algorithmic technique: contraction. ...

The Scala Experience Safe Programming Can be Fun!
... Requirements for algorithm: • pass sorted lists • if list passes test, can change at most .99 fraction of list to make it sorted ...
... Requirements for algorithm: • pass sorted lists • if list passes test, can change at most .99 fraction of list to make it sorted ...

A Genetic Algorithm Approach to Solve for Multiple Solutions of
... tomers in the distance dmin from individual x and f (x) is the raw fitness value of individual x. F (x) is a measure of the potential of the neighborhood of x for being a solution region. Regions with higher customer densities and better fitness values (lower errors) at the center have lower F (x). Th ...
... tomers in the distance dmin from individual x and f (x) is the raw fitness value of individual x. F (x) is a measure of the potential of the neighborhood of x for being a solution region. Regions with higher customer densities and better fitness values (lower errors) at the center have lower F (x). Th ...

Algorithm-analysis (1)
... Analysis of Algorithms • An algorithm is “a clearly specified set of instructions the computer will follow to solve a problem”. • Algorithm analysis is “the process of determining the amount of resources, such as time and space, that a given algorithm will require”. • The resources required by an a ...
... Analysis of Algorithms • An algorithm is “a clearly specified set of instructions the computer will follow to solve a problem”. • Algorithm analysis is “the process of determining the amount of resources, such as time and space, that a given algorithm will require”. • The resources required by an a ...
Conservation decision-making in large state spaces
... space makes optimal SDP solutions computationally expensive to compute because optimal SDP techniques require the value function to be updated for the entire state space for every time step. The high computational requirements of large SDP problems means that only simple population management proble ...
... space makes optimal SDP solutions computationally expensive to compute because optimal SDP techniques require the value function to be updated for the entire state space for every time step. The high computational requirements of large SDP problems means that only simple population management proble ...
Performance analysis and optimization of parallel Best
... and multicore machines), introduces the most commonly used parallel programming tools and discusses the challenges the programmer must face in order to take advantage of these architectures. Chapter 5 introduces the reader to the basic metrics used to assess the performance of parallel search algori ...
... and multicore machines), introduces the most commonly used parallel programming tools and discusses the challenges the programmer must face in order to take advantage of these architectures. Chapter 5 introduces the reader to the basic metrics used to assess the performance of parallel search algori ...

Algorithm-analysis (1)
... • Ex 5.7: Solving a problem requires running an O(N2) algorithm and then afterwards an O(N) algorithm. What is the total cost of solving the problem? • Ex 5.8: Solving a problem requires running an O(N) algorithm, and then performing N binary searches on an N-element array, and then running another ...
... • Ex 5.7: Solving a problem requires running an O(N2) algorithm and then afterwards an O(N) algorithm. What is the total cost of solving the problem? • Ex 5.8: Solving a problem requires running an O(N) algorithm, and then performing N binary searches on an N-element array, and then running another ...

IOSR Journal of Computer Engineering (IOSR-JCE)
... similar result via deletion and show how such a scheme preserves genetic diversity more effectively than standard approaches. We compare the performance of the new schemes to tournament selection and random deletion on an artificial deceptive problem and a range of NP hard problems: traveling salesm ...
... similar result via deletion and show how such a scheme preserves genetic diversity more effectively than standard approaches. We compare the performance of the new schemes to tournament selection and random deletion on an artificial deceptive problem and a range of NP hard problems: traveling salesm ...

Division Algorithms
... partial quotient). These partial answers are then added to find the quotient. Study the example below. To find the number of 6s in 1,010, first find partial quotients and then add them. Record the partial quotients in a column to the right of the original problem. ...
... partial quotient). These partial answers are then added to find the quotient. Study the example below. To find the number of 6s in 1,010, first find partial quotients and then add them. Record the partial quotients in a column to the right of the original problem. ...