Non-Traditional Projects in the Undergraduate AI Course
... [3] Blank, D., Kumar, D. and Meeden, L. Python robotics: An Environment for Exploring Robotics Beyond LEGOs. Proc. of SIGCSE 2003, Reno, NV, 317-321. [4] Blank, D.S., Kumar, D., Meeden L., and Yanco, H. Avoiding the Karel-the-Robot Paradox: A framework for making sophisticated robotics accessible. A ...
... [3] Blank, D., Kumar, D. and Meeden, L. Python robotics: An Environment for Exploring Robotics Beyond LEGOs. Proc. of SIGCSE 2003, Reno, NV, 317-321. [4] Blank, D.S., Kumar, D., Meeden L., and Yanco, H. Avoiding the Karel-the-Robot Paradox: A framework for making sophisticated robotics accessible. A ...
The 2004 Mobile Robot Competition and Exhibition
... such metrics can be determined and will be considered for inclusion in future events. Also on display during the competition were recently developed virtual robot/arena environments called USARsim.2 These high-fidelity simulation tools, developed principally by the University of Pittsburgh, allow ro ...
... such metrics can be determined and will be considered for inclusion in future events. Also on display during the competition were recently developed virtual robot/arena environments called USARsim.2 These high-fidelity simulation tools, developed principally by the University of Pittsburgh, allow ro ...

Viewpoint – Progress in machine intelligence.
... Gupta SK, Paredis CJJ, Sinha R, Brown PF (2001). Intelligent assembly modelling and simulation, Assembly Automation, ISSN: 0144-5154, Vol: 21 Issue: 3, pp 215 - 235 ...
... Gupta SK, Paredis CJJ, Sinha R, Brown PF (2001). Intelligent assembly modelling and simulation, Assembly Automation, ISSN: 0144-5154, Vol: 21 Issue: 3, pp 215 - 235 ...

Robotics - OMICS International
... signed an agreement with more than 1000 International Societies to make healthcare information Open Access. ...
... signed an agreement with more than 1000 International Societies to make healthcare information Open Access. ...
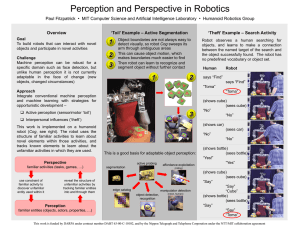
ppt - people.csail.mit.edu
... competences, but the tools to forge those competences out of raw physical experiences. Three important tools for extending a robot’s perceptual abilities whose importance have been recognized individually are related and brought together. The first is active perception, where the robot employs motor ...
... competences, but the tools to forge those competences out of raw physical experiences. Three important tools for extending a robot’s perceptual abilities whose importance have been recognized individually are related and brought together. The first is active perception, where the robot employs motor ...

CS 415 – A.I.
... Sometimes the expert just knows what he/she knows Can’t cross-apply knowledge from different fields like humans can ...
... Sometimes the expert just knows what he/she knows Can’t cross-apply knowledge from different fields like humans can ...

Artificial Neural Networks For Spatial Perception
... majority of robotic systems are still mainly performing preprogrammed automation tasks. While e.g. humanoid robots have been proposed to assist with activities of daily living, especially in household tasks and elderly-care, no robust and useful systems are currently available – neither in research ...
... majority of robotic systems are still mainly performing preprogrammed automation tasks. While e.g. humanoid robots have been proposed to assist with activities of daily living, especially in household tasks and elderly-care, no robust and useful systems are currently available – neither in research ...

An Ontology-Based Symbol Grounding System for Human
... Loutfi, A.; Coradeschi, S.; and Saffiotti, A. 2005. Maintaining coherent perceptual information using anchoring. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI). Martin, C. E., and Firby, R. J. 1991. Generating natural language expectations from a reactive exe ...
... Loutfi, A.; Coradeschi, S.; and Saffiotti, A. 2005. Maintaining coherent perceptual information using anchoring. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI). Martin, C. E., and Firby, R. J. 1991. Generating natural language expectations from a reactive exe ...
Artificial Intelligence - Instructional Technology Portfolio
... Artificial Intelligence. (n.d.) Retrieved on November 29, 2008, from http://wwwformal.stanford.edu/jmc/whatisai/node1.html. Artificial Intelligence and Robotics. (2008). Retrieved on December 4, 2008, from http://smartmachines.blogspot.com/2008/11/hondas-robotic-legs.html. ASIMO. (2007). Retrieved o ...
... Artificial Intelligence. (n.d.) Retrieved on November 29, 2008, from http://wwwformal.stanford.edu/jmc/whatisai/node1.html. Artificial Intelligence and Robotics. (2008). Retrieved on December 4, 2008, from http://smartmachines.blogspot.com/2008/11/hondas-robotic-legs.html. ASIMO. (2007). Retrieved o ...
Why Robot Nannies Probably Won`t Do Much Psychological Damage
... caring potential of their products, but rather will rapidly converge on under-representing ...
... caring potential of their products, but rather will rapidly converge on under-representing ...
Introduction to Swarm Robotics
... [2] Josh Bongard, "Biologically Inspired Computing," Computer, vol. 42, no. 4, pp. 95-98, Apr. 2009 [3] R. Beck, “Analysis, Design and Implementation of Building Blocks for Self-Reconfigurable Modular robots”, M.S. Thesis, University of Southern Denmark, 2003. [4] N.Y. Chong et al, “Robots on Self-O ...
... [2] Josh Bongard, "Biologically Inspired Computing," Computer, vol. 42, no. 4, pp. 95-98, Apr. 2009 [3] R. Beck, “Analysis, Design and Implementation of Building Blocks for Self-Reconfigurable Modular robots”, M.S. Thesis, University of Southern Denmark, 2003. [4] N.Y. Chong et al, “Robots on Self-O ...

Towards a theory of Hybrid Intelligent Autonomous Systems
... intelligent autonomous systems. More, they are also in possession of some computational tool such as Fuzzy Logic(FL), Neural Networks (NN), Expert system(ES), Genetic Algorithms (GA) and other more technologies that are more effective in the design and development of intelligent autonomous systems t ...
... intelligent autonomous systems. More, they are also in possession of some computational tool such as Fuzzy Logic(FL), Neural Networks (NN), Expert system(ES), Genetic Algorithms (GA) and other more technologies that are more effective in the design and development of intelligent autonomous systems t ...

Building Like Animals: Using Autonomous Robots to
... well-defined tasks, where they can be outcompeted by deterministic artificial systems. However, biologically inspired solutions can be useful in situations where designed systems need to be adaptable, rather than optimal. Evolved life excels at survival. Correspondingly, designed systems with capabi ...
... well-defined tasks, where they can be outcompeted by deterministic artificial systems. However, biologically inspired solutions can be useful in situations where designed systems need to be adaptable, rather than optimal. Evolved life excels at survival. Correspondingly, designed systems with capabi ...

Learning Concepts by Interaction
... Mobile Robot. To appear at The Sixteenth International Joint Conference on Artificial Intelligence. [2] Rosenstein, M and Cohen P.. 1999. Continuous Categories for a Mobile Robot. To appear at The Sixteenth National Conference on Artificial Intelligence. ...
... Mobile Robot. To appear at The Sixteenth International Joint Conference on Artificial Intelligence. [2] Rosenstein, M and Cohen P.. 1999. Continuous Categories for a Mobile Robot. To appear at The Sixteenth National Conference on Artificial Intelligence. ...

Using robots to investigate the evolution of adaptive behavior
... 13. Clune J, Mouret J-B, Lipson H: The evolutionary origins of modularity. Proc R Soc B 2013, 1755 http://dx.doi.org/10.1098/ rspb.2012.2863. 14. Matarić M, Cliff D: Challenges in evolving controllers for physical robots. Robot Auton Syst 1996, 19:67-83. 15. Eiben AE: Grand challenges for evolution ...
... 13. Clune J, Mouret J-B, Lipson H: The evolutionary origins of modularity. Proc R Soc B 2013, 1755 http://dx.doi.org/10.1098/ rspb.2012.2863. 14. Matarić M, Cliff D: Challenges in evolving controllers for physical robots. Robot Auton Syst 1996, 19:67-83. 15. Eiben AE: Grand challenges for evolution ...

PDF
... 2. Challenges and research approaches Service robots working in human environments4,5 have considerably different requirements than the industrial robots included in production lines. Since they cannot be caged, their safeness to people must be intrinsically guaranteed. In many cases there won’t be ...
... 2. Challenges and research approaches Service robots working in human environments4,5 have considerably different requirements than the industrial robots included in production lines. Since they cannot be caged, their safeness to people must be intrinsically guaranteed. In many cases there won’t be ...

Evolutionary Robotics
... Because there is an “I” in the sentence. Whatever that “I” thing is, it exists.” ...
... Because there is an “I” in the sentence. Whatever that “I” thing is, it exists.” ...

Planning for a Mobile Robot to Attend a Conference
... requests. Autonomous Robots, March 1998. 5. J. Hoffmann. The Metric-FF planning system: Translating ”ignoring delete lists” to numeric state variables. Journal of Artificial Intelligence, 20:291–341, 2003. 6. B.A. Maxwell, W. Smart, A. Jacoff, J. Casper, B. Weiss, J. Scholtz, H. Yanco, M. Micire, A. ...
... requests. Autonomous Robots, March 1998. 5. J. Hoffmann. The Metric-FF planning system: Translating ”ignoring delete lists” to numeric state variables. Journal of Artificial Intelligence, 20:291–341, 2003. 6. B.A. Maxwell, W. Smart, A. Jacoff, J. Casper, B. Weiss, J. Scholtz, H. Yanco, M. Micire, A. ...
news summary (44) - Quest Group`s Blog
... Turns out many of these researchers can match science-fiction writers Arthur C. Clarke and Philip K. Dick for dystopian visions. In many cases, little imagination was required -scenarios like technology being used to sway elections or new cyber attacks using AI are being seen in the real world, or a ...
... Turns out many of these researchers can match science-fiction writers Arthur C. Clarke and Philip K. Dick for dystopian visions. In many cases, little imagination was required -scenarios like technology being used to sway elections or new cyber attacks using AI are being seen in the real world, or a ...

Group 13
... PSPICE Lab • The objective of this lab was to be able to construct a simulation of a circuit using the program PSPICE and to also be able to use PSPICE to solve for voltage and current. • Although the circuits were not real, they still provided a great deal of information and practice in circuit ...
... PSPICE Lab • The objective of this lab was to be able to construct a simulation of a circuit using the program PSPICE and to also be able to use PSPICE to solve for voltage and current. • Although the circuits were not real, they still provided a great deal of information and practice in circuit ...

Details - John Franco
... this paper, it is shown that recalculation is often not necessary, particularly when several optimal solutions (shortest paths) exist, and an efficient test for determining this is presented. These ideas are packaged in a modified version of D* Lite which we call ID* Lite for Improved D* Lite. We pr ...
... this paper, it is shown that recalculation is often not necessary, particularly when several optimal solutions (shortest paths) exist, and an efficient test for determining this is presented. These ideas are packaged in a modified version of D* Lite which we call ID* Lite for Improved D* Lite. We pr ...
Comp 1017 Robots
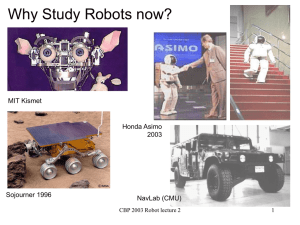
... AI CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...
... AI CBP 2003 Robot lecture 2 Figure from ROBOT, Moravec, Oxford, 1998, Chapter 3: Power and Presence, page 68 ...

Definition of a `Robot`
... Nobel prize for his works and very influential and prolific as a writer and playwright. The use of the word Robot was introduced into his play R.U.R. (Rossum's Universal Robots) which opened in Prague in January 1921. In R.U.R., Capek poses a paradise, where the machines initially bring so many bene ...
... Nobel prize for his works and very influential and prolific as a writer and playwright. The use of the word Robot was introduced into his play R.U.R. (Rossum's Universal Robots) which opened in Prague in January 1921. In R.U.R., Capek poses a paradise, where the machines initially bring so many bene ...
Brief History of Artificial Intelligence - OCW
... philosophy into logical analysis of knowledge. Karel Capek's play "R.U.R."(Rossum's Universal Robots) opens in London (1923). - First use of the word 'robot' in English. Robot, which is derived from a Czech word meaning "menial labor," got its modern meaning from a 1920 play, R.U.R. (Rossum's Univer ...
... philosophy into logical analysis of knowledge. Karel Capek's play "R.U.R."(Rossum's Universal Robots) opens in London (1923). - First use of the word 'robot' in English. Robot, which is derived from a Czech word meaning "menial labor," got its modern meaning from a 1920 play, R.U.R. (Rossum's Univer ...