Metrics and benchmarks in human-robot interaction: Recent
... human users), manipulation (i.e., physical robot interaction with the environment), and social (i.e., social interaction tasks between robots and human users). Similarly, Olsen and Goodrich (2003) offered a group of metrics for evaluating human-robot interaction including: task effectiveness (i.e., ef ...
... human users), manipulation (i.e., physical robot interaction with the environment), and social (i.e., social interaction tasks between robots and human users). Similarly, Olsen and Goodrich (2003) offered a group of metrics for evaluating human-robot interaction including: task effectiveness (i.e., ef ...

An Associator Network Approach to Robot Learning by Imitation
... model is given information on the current state and the goal and produces the required motor commands. Following which the forward model creates the expected next state based on the output from the behaviour model. Comparing the predicted state with the actual state of the demonstrator produces an e ...
... model is given information on the current state and the goal and produces the required motor commands. Following which the forward model creates the expected next state based on the output from the behaviour model. Comparing the predicted state with the actual state of the demonstrator produces an e ...

30200385.pdf
... an integrated, systematic approach that simultaneously addresses the problems of effective cooperation between robots while allowing fast, smooth reaction to ever changing conditions. This paper addresses such multi-robot control issues in dynamic, adversarial environments. The work is demonstrated ...
... an integrated, systematic approach that simultaneously addresses the problems of effective cooperation between robots while allowing fast, smooth reaction to ever changing conditions. This paper addresses such multi-robot control issues in dynamic, adversarial environments. The work is demonstrated ...


Knowledge Processing for Cognitive Robots
... SRI as early as 1966 and the realization of an autonomous robot with human problem-solving skills was by many considered to be the holy grail of Artificial Intelligence [20]. The research on AI methods for autonomous robot control was framed within the so-called sense-plan-act architecture in which ...
... SRI as early as 1966 and the realization of an autonomous robot with human problem-solving skills was by many considered to be the holy grail of Artificial Intelligence [20]. The research on AI methods for autonomous robot control was framed within the so-called sense-plan-act architecture in which ...

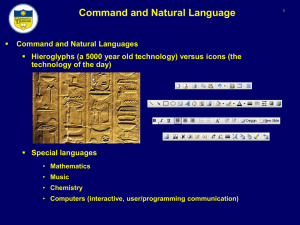
Soarian™ User Interface
... • HRI inputs include vision and speech and can… • Process human-oriented data such as facial expression and gestures • Understand language between human users and robots • Apply meaning to the facial and physical expressions and speech • Real-time perceptive abilities of robots • Need to perceive, u ...
... • HRI inputs include vision and speech and can… • Process human-oriented data such as facial expression and gestures • Understand language between human users and robots • Apply meaning to the facial and physical expressions and speech • Real-time perceptive abilities of robots • Need to perceive, u ...

Impossibles AIBO Four-Legged Team Description Paper
... other RoboCup Leagues because of the following four reasons which are also considered as “Impossibles” objectives in AIBO league. AIBO does support the real world challenges, whereas Rescue Simulation does not. Additionally, it is the only physical robot league in which there is no need to get invol ...
... other RoboCup Leagues because of the following four reasons which are also considered as “Impossibles” objectives in AIBO league. AIBO does support the real world challenges, whereas Rescue Simulation does not. Additionally, it is the only physical robot league in which there is no need to get invol ...
Extending Player/Stage/Gazebo towards Cognitive
... Section II provides an overview of our system. Section III describes our architectural and cognitive layer. Section IV presents our Player/Stage/Gazebo extensions in greater detail. Section V describes our application scenario and some experimental results. Section VI presents related work and final ...
... Section II provides an overview of our system. Section III describes our architectural and cognitive layer. Section IV presents our Player/Stage/Gazebo extensions in greater detail. Section V describes our application scenario and some experimental results. Section VI presents related work and final ...

Intelligence without representation
... Search techniques could then be used for planning within this well-understood world. Learning could also be done within the blocks world; there were only a few simple concepts worth learning and they could be captured by enumerating the set of subexpressions which must be contained in any formal des ...
... Search techniques could then be used for planning within this well-understood world. Learning could also be done within the blocks world; there were only a few simple concepts worth learning and they could be captured by enumerating the set of subexpressions which must be contained in any formal des ...

Intelligence without representation
... Search techniques could then be used for planning within this well-understood world. Learning could also be done within the blocks world; there were only a few simple concepts worth learning and they could be captured by enumerating the set of subexpressions which must be contained in any formal des ...
... Search techniques could then be used for planning within this well-understood world. Learning could also be done within the blocks world; there were only a few simple concepts worth learning and they could be captured by enumerating the set of subexpressions which must be contained in any formal des ...

The Triangle of Life
... self-driven aggregation to implement ‘birth’. The novelty of this framework lies in the pivotal role of reproduction and conception. The life cycle it captures does not run from birth to death, but from conception to conception and it is repeated in real hardware thus creating ‘robot children’ over ...
... self-driven aggregation to implement ‘birth’. The novelty of this framework lies in the pivotal role of reproduction and conception. The life cycle it captures does not run from birth to death, but from conception to conception and it is repeated in real hardware thus creating ‘robot children’ over ...

MIT Mobile Robots - What`s Next? - DSpace@MIT
... such motors with microsensors, a compiled-down version of our subsumption architecture, and miniature power supplies, we can imagine gnat-sized microrobotic systems on a chip at a fraction of the cost of traditional robots, with none of the problems associated with maintenance and spare parts. Havi ...
... such motors with microsensors, a compiled-down version of our subsumption architecture, and miniature power supplies, we can imagine gnat-sized microrobotic systems on a chip at a fraction of the cost of traditional robots, with none of the problems associated with maintenance and spare parts. Havi ...
Soarian™ User Interface
... • The ability to maneuver about a scene without unwanted contact or collisions. • Safety also refers to protection (as much as it is possible) of a robot’s user and of the robot itself. • CASERO- a robot used in a nursing home • http://www.youtube.com/watch?v=dx0zxr3D_zU ...
... • The ability to maneuver about a scene without unwanted contact or collisions. • Safety also refers to protection (as much as it is possible) of a robot’s user and of the robot itself. • CASERO- a robot used in a nursing home • http://www.youtube.com/watch?v=dx0zxr3D_zU ...
Affective computing and HRI (HCI2007) 2x45min lecture
... – use emotions in simulated-agent plans (to simulate human reasoning) (Gratch & Marsella), – communication and joint attention (Breazeal, MIT) – robot acceptation (Heerink, Telin) – Persuasive design (VR training, tutor agents (Gratch & Marsella, Nijholt)) – Interactive robot learning (second part o ...
... – use emotions in simulated-agent plans (to simulate human reasoning) (Gratch & Marsella), – communication and joint attention (Breazeal, MIT) – robot acceptation (Heerink, Telin) – Persuasive design (VR training, tutor agents (Gratch & Marsella, Nijholt)) – Interactive robot learning (second part o ...
Behavior-based robotics as a tool for synthesis of artificial behavior
... of learning in mobile robots have been inspired by biological learning systems. Demonstrations and applications Consistent with the dual goal of the field itself, behaviorbased robotics has been used both in practical applications and in futuristic exploratory endeavors. Behavior-based robots have d ...
... of learning in mobile robots have been inspired by biological learning systems. Demonstrations and applications Consistent with the dual goal of the field itself, behaviorbased robotics has been used both in practical applications and in futuristic exploratory endeavors. Behavior-based robots have d ...
Intelligence without representation* Rodney A. Brooks
... representations are completely misleading and quite different from what we really use. 3.1. A continuing story Meanwhile our friends in the 1890s are busy at work on their AF machine. They have come to agree that the project is too big to be worked on as a single entity and that they will need to be ...
... representations are completely misleading and quite different from what we really use. 3.1. A continuing story Meanwhile our friends in the 1890s are busy at work on their AF machine. They have come to agree that the project is too big to be worked on as a single entity and that they will need to be ...

An Emotional Mimicking Humanoid Biped Robot and its Quantum
... actions will need to be slow and you will need to hold them until you get the visual feedback from the HBP that it has to see your movement. That is indicated when the avatar moves and holds the new position. (Avatar is a small graphic representation of yourself as a little humanoid as seen by the c ...
... actions will need to be slow and you will need to hold them until you get the visual feedback from the HBP that it has to see your movement. That is indicated when the avatar moves and holds the new position. (Avatar is a small graphic representation of yourself as a little humanoid as seen by the c ...

Moral and ethical questions for robotics public policy
... possesses certain cognitive – or moral – capabilities? There are very few laws or public policies regarding artificially intelligent and cognitively capable robotsi, and this is relatively understandable given that the technology to produce such viable artificially intelligent robots does not yet ex ...
... possesses certain cognitive – or moral – capabilities? There are very few laws or public policies regarding artificially intelligent and cognitively capable robotsi, and this is relatively understandable given that the technology to produce such viable artificially intelligent robots does not yet ex ...
Robots and rights report 1.2 - Biocentre
... Kerstin Dautenhahn, Professor of Artificial Intelligence, University of Hertfordshire and Prof. Steve Torrance, Professor of Cognitive Science, University of Middlesex and Visiting Senior Research Fellow at the Centre for Research in Cognitive Science, University of Sussex. ...
... Kerstin Dautenhahn, Professor of Artificial Intelligence, University of Hertfordshire and Prof. Steve Torrance, Professor of Cognitive Science, University of Middlesex and Visiting Senior Research Fellow at the Centre for Research in Cognitive Science, University of Sussex. ...
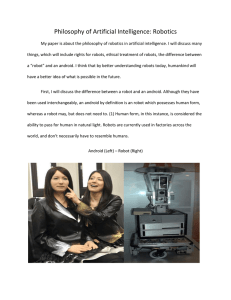
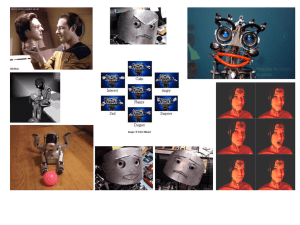
Philosophy of Artificial Intelligence: Robotics
... place in society and people become more used their presence, humans will eventually bring robots into their homes (Like Bicentennial Man). With the potential introduction into people’s homes, less robotic, more human-like entities will be desired. This is where androids come in. As seen in the pictu ...
... place in society and people become more used their presence, humans will eventually bring robots into their homes (Like Bicentennial Man). With the potential introduction into people’s homes, less robotic, more human-like entities will be desired. This is where androids come in. As seen in the pictu ...

here - FER
... to the complexity of this task, as agents need to learn unknown environment parameters while forming these local policies in an online fashion [12]. Although the agents in a system can be pre-programmed with a set of behaviours designed in advance, the learning of new behaviours online is often nece ...
... to the complexity of this task, as agents need to learn unknown environment parameters while forming these local policies in an online fashion [12]. Although the agents in a system can be pre-programmed with a set of behaviours designed in advance, the learning of new behaviours online is often nece ...
The 1995 Robot Competition and Exhibition - David P. Miller
... The first goal is to allow robot researchers from around the world to gather (with their robots) under one roof, work on the same tasks, and exchange technical information. Second is to assess (and push) the state of the art in robotics. Third is to contrast and compare competing approaches as appli ...
... The first goal is to allow robot researchers from around the world to gather (with their robots) under one roof, work on the same tasks, and exchange technical information. Second is to assess (and push) the state of the art in robotics. Third is to contrast and compare competing approaches as appli ...