State Space Construction by Attention Control
... construction with the attention control. In the beginning, the error of the method using standard discriminant functions was smaller than the method using the attention control. Then the method using the attention control method became better at 20 states. We analyze these phenomena as follows: In t ...
... construction with the attention control. In the beginning, the error of the method using standard discriminant functions was smaller than the method using the attention control. Then the method using the attention control method became better at 20 states. We analyze these phenomena as follows: In t ...
How to keep robot/AI under control?
... that don’t act on a purely logical level. Instead we must program robots to factor in an element of human emotion into their decision making, whilst this could be very difficult to do and even could cause some harm if robots were to act emotionally I still feel that empathy, compassion and other hum ...
... that don’t act on a purely logical level. Instead we must program robots to factor in an element of human emotion into their decision making, whilst this could be very difficult to do and even could cause some harm if robots were to act emotionally I still feel that empathy, compassion and other hum ...

Three Years of Using Robots in the Artificial Intelligence Course
... algorithms. Finally, we used Java and LeJos (http://lejos.sourceforge.net) with the robot. This enabled us to utilize a larger part of the on-board main memory for programs, allowing our students to write larger programs. 2. Our Goals and Objectives The following principles guided how we used robots ...
... algorithms. Finally, we used Java and LeJos (http://lejos.sourceforge.net) with the robot. This enabled us to utilize a larger part of the on-board main memory for programs, allowing our students to write larger programs. 2. Our Goals and Objectives The following principles guided how we used robots ...
The Institutional Repository of University of Tampere Post
... simply hired in their free time for lower wages similar to outsourcing. Their model had copyright risks and the community members sometimes left the project because of their loose connections with the company. The OSS is an appealing choice for the research projects. OpenCog, an open source AI frame ...
... simply hired in their free time for lower wages similar to outsourcing. Their model had copyright risks and the community members sometimes left the project because of their loose connections with the company. The OSS is an appealing choice for the research projects. OpenCog, an open source AI frame ...

On Multi-Robot Area Coverage
... the case when the robots have a limited range of communication, meaning that a message sent by a robot is transmitted only to robots within a certain distance from that robot. ...
... the case when the robots have a limited range of communication, meaning that a message sent by a robot is transmitted only to robots within a certain distance from that robot. ...

Anthropomorphism and the social robot
... or both. But it is not a simple problem. As discussed by Foner [5], people’s expectations based on strong anthropomorphic paradigms in HCI overly increase a user’s expectations of the system’s performance. Similarly in social robotics, the ideal paradigm should not necessarily be a synthetic human. ...
... or both. But it is not a simple problem. As discussed by Foner [5], people’s expectations based on strong anthropomorphic paradigms in HCI overly increase a user’s expectations of the system’s performance. Similarly in social robotics, the ideal paradigm should not necessarily be a synthetic human. ...

I Agents, Bodies, Constraints, Dynamics, and Evolution Alan K. Mackworth
... applet we have developed. There you can see this problem satisfied using arc consistency, and other techniques, to find out whether there is no solution, a unique solution, or more than one. For this problem, as it happens, there is a unique solution for the set of possible meetings, found by runnin ...
... applet we have developed. There you can see this problem satisfied using arc consistency, and other techniques, to find out whether there is no solution, a unique solution, or more than one. For this problem, as it happens, there is a unique solution for the set of possible meetings, found by runnin ...

events:knowledge-workshop-iros2011:tikanmaki.pdf (340.2 KB)
... The main unit in this representation is called a Marker. A marker is a computational component responsible for storing and updating values related to a set of environmental features’ prior knowledge and task information. As the main purpose of the Marker is to act as a generalized structure; the num ...
... The main unit in this representation is called a Marker. A marker is a computational component responsible for storing and updating values related to a set of environmental features’ prior knowledge and task information. As the main purpose of the Marker is to act as a generalized structure; the num ...

Social Robots: Approaches and Conceptions in the Perspective of
... of technological determinism, the issue of the meaning and significance of the topos, its value message has the fundamental meaning. That is why it seems to subdue any new material medium – photography, cinema or computer. Technological determinism approves the relative autonomy of technical systems ...
... of technological determinism, the issue of the meaning and significance of the topos, its value message has the fundamental meaning. That is why it seems to subdue any new material medium – photography, cinema or computer. Technological determinism approves the relative autonomy of technical systems ...

Learning to Parse Natural Language Commands to a
... of words in the NL sentence xi (up to a fixed length, N = 4 in our experiments). We define Li to be the initial sentential CCG category of the sentence xi , having syntactic category S (sentence) and meaning zi . Splits of Li into CCG categories are recursively explored to depth two, yielding a set ...
... of words in the NL sentence xi (up to a fixed length, N = 4 in our experiments). We define Li to be the initial sentential CCG category of the sentence xi , having syntactic category S (sentence) and meaning zi . Splits of Li into CCG categories are recursively explored to depth two, yielding a set ...
AI Armageddon and the Three Laws of Robotics
... of human commands and the robot would not express any ingenuity or creativity in the carrying out of those commands. The one exception to this attitude can be seen in “The Bicentennial Man” (Asimov, 1976). In the story, Andrew Martin is a robot created in the “early days” of robots when the mathemat ...
... of human commands and the robot would not express any ingenuity or creativity in the carrying out of those commands. The one exception to this attitude can be seen in “The Bicentennial Man” (Asimov, 1976). In the story, Andrew Martin is a robot created in the “early days” of robots when the mathemat ...

Anthropomorphism and The Social Robot
... causal mechanisms” [18]. Building social robots forces a new perspective on this. When interaction with people are the motivation for social robot research, then people’s perceptual biases have an influence on how the robot is realised. The question arising in this paper is not how to avoid anthropo ...
... causal mechanisms” [18]. Building social robots forces a new perspective on this. When interaction with people are the motivation for social robot research, then people’s perceptual biases have an influence on how the robot is realised. The question arising in this paper is not how to avoid anthropo ...

Real Robots that Pass Human Tests of Self-Consciousness
... it can be proved that, in theory, a future robot represented by R3 can answer provably correctly (which for plausible reasons, explained by Floridi, entails that R3 has satisfied some of the structural requirements for self-consciousness). In this paper we explain and demonstrate the engineering tha ...
... it can be proved that, in theory, a future robot represented by R3 can answer provably correctly (which for plausible reasons, explained by Floridi, entails that R3 has satisfied some of the structural requirements for self-consciousness). In this paper we explain and demonstrate the engineering tha ...

"Computer Program Learns Language Rules and Composes
... devices capable of human interaction to impart to machines the ability to glean the subtleties of human communication, but insults and swear words also pose a unique challenge to make artificial intelligence agents with practical applications. Central to this endeavor is the ability to curb the huma ...
... devices capable of human interaction to impart to machines the ability to glean the subtleties of human communication, but insults and swear words also pose a unique challenge to make artificial intelligence agents with practical applications. Central to this endeavor is the ability to curb the huma ...

Robotic tool use and problem solving based on
... two learning approaches: probabilistic learning (Bayesian Networks, BN [11]) and neural networks (Denoising Autoencoders, dA [22]). The iCub [7] humanoid robot learns these affordances by performing numerous actions on a set of objects displaced on a table (see Fig. 1). The learned models can then b ...
... two learning approaches: probabilistic learning (Bayesian Networks, BN [11]) and neural networks (Denoising Autoencoders, dA [22]). The iCub [7] humanoid robot learns these affordances by performing numerous actions on a set of objects displaced on a table (see Fig. 1). The learned models can then b ...

The Frankenstein Complex and Asimov`s Three Laws
... creatures that possess a soul. To meddle in this area is to meddle in God’s domain. This fear of man broaching, through technology, into God’s realm and being unable to control his own creations is referred to as the “Frankenstein Complex” by Isaac Asimov in a number of his essays (most notably (Asi ...
... creatures that possess a soul. To meddle in this area is to meddle in God’s domain. This fear of man broaching, through technology, into God’s realm and being unable to control his own creations is referred to as the “Frankenstein Complex” by Isaac Asimov in a number of his essays (most notably (Asi ...
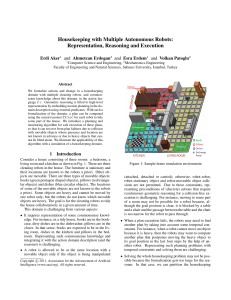
Housekeeping with Multiple Autonomous Robots: Representation
... We handle these challenges by representing the housekeeping domain in the action description language C+ (Giunchiglia et al. 2004) as a set of “causal laws” (Section 3) and using the causal reasoner CC ALC (McCain and Turner 1997) for planning (Section 4), like in (Caldiran et al. 2009a; 2009b; Hasp ...
... We handle these challenges by representing the housekeeping domain in the action description language C+ (Giunchiglia et al. 2004) as a set of “causal laws” (Section 3) and using the causal reasoner CC ALC (McCain and Turner 1997) for planning (Section 4), like in (Caldiran et al. 2009a; 2009b; Hasp ...
CptS 440 / 540 Artificial Intelligence
... • One to figure out how to grasp the lighbulb without breaking it • One to figure out the arm solutions that will get the arm to the socket • One to organize the construction teams • One to hack the planning system • One to indicate how the robot mimics human motor behavior in lightbulb changing ...
... • One to figure out how to grasp the lighbulb without breaking it • One to figure out the arm solutions that will get the arm to the socket • One to organize the construction teams • One to hack the planning system • One to indicate how the robot mimics human motor behavior in lightbulb changing ...
BIT 143: C++ Programming: Data Structures
... Up to now, a robot’s exact initial situation was known at the start of a task. When we wrote our programs, this information allowed robots to find things and avoid running into walls. However, these programs worked only in their specific initial situations. If a robot tried to execute one of these p ...
... Up to now, a robot’s exact initial situation was known at the start of a task. When we wrote our programs, this information allowed robots to find things and avoid running into walls. However, these programs worked only in their specific initial situations. If a robot tried to execute one of these p ...

Reexamining Behavior-Based Artificial Intelligence
... also hierarchical, so the play agency competes with the food agency for the individual’s attention. Once play establishes control, the block and doll agencies compete. Minsky’s agents have both perception and action, but not memory, which is managed by another network of agencies of a different sort ...
... also hierarchical, so the play agency competes with the food agency for the individual’s attention. Once play establishes control, the block and doll agencies compete. Minsky’s agents have both perception and action, but not memory, which is managed by another network of agencies of a different sort ...
How Robots Work
... describes the majority of robots fairly well. Most robots in the world are designed for heavy, repetitive manufacturing work. They handle tasks that are difficult, dangerous or boring to human beings. The most common manufacturing robot is the robotic arm. A typical robotic arm is made up of seven m ...
... describes the majority of robots fairly well. Most robots in the world are designed for heavy, repetitive manufacturing work. They handle tasks that are difficult, dangerous or boring to human beings. The most common manufacturing robot is the robotic arm. A typical robotic arm is made up of seven m ...

www.cs.ubc.ca
... is in terms of how the ‘current’ action depends on current inputs and past inputs and other values; the state is derived so that the output, instead of being a function of the current inputs and all past history, is a function of the current inputs and the state. 4. Although the specification of wha ...
... is in terms of how the ‘current’ action depends on current inputs and past inputs and other values; the state is derived so that the output, instead of being a function of the current inputs and all past history, is a function of the current inputs and the state. 4. Although the specification of wha ...
Communications of the ACM
... should generate wheeled robots if supplied with a simulation of flat terrain and legged robots if supplied with a simulation of rugged terrain. Recent work in mainstream robotics has demonstrated the possible advantage of combining wheels and legs in the same robot: an evolutionary system should red ...
... should generate wheeled robots if supplied with a simulation of flat terrain and legged robots if supplied with a simulation of rugged terrain. Recent work in mainstream robotics has demonstrated the possible advantage of combining wheels and legs in the same robot: an evolutionary system should red ...
The Next Step: Exponential Life 1 — PB
... The goal of artificial intelligence (AI) research has been to understand the principles underlying intelligent behavior and to build those principles into machines that can then exhibit such behavior. In the field’s early years, several distinction definitions of “intelligent” were pursued, includin ...
... The goal of artificial intelligence (AI) research has been to understand the principles underlying intelligent behavior and to build those principles into machines that can then exhibit such behavior. In the field’s early years, several distinction definitions of “intelligent” were pursued, includin ...

The Eastern Construction of the Artificial Mind
... clockwork technologies, karakuri became increasingly complex. Beyond the historical divergence of Eastern and Western marionette traditions (such as their means of operation: from above and in the darkness in the West but from beneath in the East), karakuri tried, from the beginning, to express seve ...
... clockwork technologies, karakuri became increasingly complex. Beyond the historical divergence of Eastern and Western marionette traditions (such as their means of operation: from above and in the darkness in the West but from beneath in the East), karakuri tried, from the beginning, to express seve ...