The 1995 Robot Competition and Exhibition - David P. Miller
... After much discussion with robotics researchers, we decided on a format similar to the previous year’s. There were four basic parts: (1) a formal competition with fixed tasks and scoring, (2) a wheelchair exhibition (a new addition) in which the results of mobile robotics research can be shown in a ...
... After much discussion with robotics researchers, we decided on a format similar to the previous year’s. There were four basic parts: (1) a formal competition with fixed tasks and scoring, (2) a wheelchair exhibition (a new addition) in which the results of mobile robotics research can be shown in a ...

Visual and oculomotor selection: links, causes and
... SOA). (b) Average relative sensitivity values (microstimulation/control) are shown for each SOA tested (red dots) with red lines indicating the standard error of the mean. The blue arrow indicates the improvement in performance observed when the distractor was removed, with no FEF stimulation. Relat ...
... SOA). (b) Average relative sensitivity values (microstimulation/control) are shown for each SOA tested (red dots) with red lines indicating the standard error of the mean. The blue arrow indicates the improvement in performance observed when the distractor was removed, with no FEF stimulation. Relat ...


Non-rigid structure from motion using quadratic deformation models
... framework include work by Rabaud and Belongie [13] who define the set of possible 3D shapes as a smooth and low-dimensional manifold. Their approach assumes a non-linear optimization scheme imposing smoothness constraints on the deformations and enforcing a manifold dimensionality constraint on the ...
... framework include work by Rabaud and Belongie [13] who define the set of possible 3D shapes as a smooth and low-dimensional manifold. Their approach assumes a non-linear optimization scheme imposing smoothness constraints on the deformations and enforcing a manifold dimensionality constraint on the ...


MIrror neuRons based RObot Recognition - LIRA-Lab
... discharge during goal-directed actions such as grasping, manipulating, tearing, and holding. Interestingly, they do not discharge during finger and hand movements similar to those effective in triggering them, when made with other purposes (e.g., scratching, pushing away). Furthermore, many F5 neuro ...
... discharge during goal-directed actions such as grasping, manipulating, tearing, and holding. Interestingly, they do not discharge during finger and hand movements similar to those effective in triggering them, when made with other purposes (e.g., scratching, pushing away). Furthermore, many F5 neuro ...
Special issue: Computational intelligence models for image
... in the system, while fuzzy entropy is used as the evaluation criterion. The proposed model has been shown to be more effective than other evolutionary-based methods in terms of applicability and computational efficiency. A multi-objective image segmentation model with an interactive evolutionary com ...
... in the system, while fuzzy entropy is used as the evaluation criterion. The proposed model has been shown to be more effective than other evolutionary-based methods in terms of applicability and computational efficiency. A multi-objective image segmentation model with an interactive evolutionary com ...



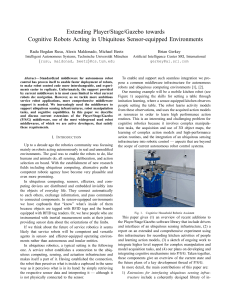
Towards a theory of Hybrid Intelligent Autonomous Systems
... When the objective is close to the robot, both mobile base and arm move and redundancy can be used to maximise a manipulability criterion. The partial results obtained with the real robot consolidate the results of simulation. The work does not propose an autonomous ...
... When the objective is close to the robot, both mobile base and arm move and redundancy can be used to maximise a manipulability criterion. The partial results obtained with the real robot consolidate the results of simulation. The work does not propose an autonomous ...

Impossibles AIBO Four-Legged Team Description Paper
... charge of receiving two inputs and producing a set of two outputs. These inputs and outputs are as follows: Inputs: (1) A stream of images taken by robot’s camera. Surely, these images contain a large amount of noise which has been caused by some issues such as robot’s motion or distance of the ...
... charge of receiving two inputs and producing a set of two outputs. These inputs and outputs are as follows: Inputs: (1) A stream of images taken by robot’s camera. Surely, these images contain a large amount of noise which has been caused by some issues such as robot’s motion or distance of the ...

Transcripts/2_4 1
... d. When you get away from primary visual cortex, you can get more subtle deficits that don’t involve visual field defects; they don’t involve loss of visual perception they result in subtle inability to analyze some aspects of an image and not others. XI. The LGN… [S11] a. The LGN is part of the tha ...
... d. When you get away from primary visual cortex, you can get more subtle deficits that don’t involve visual field defects; they don’t involve loss of visual perception they result in subtle inability to analyze some aspects of an image and not others. XI. The LGN… [S11] a. The LGN is part of the tha ...

Application of Qualitative Reasoning to Robotic Soccer
... reactive systems as an implementation of reflexive actions whereas classical AI systems are implementing the more strategic planning approach. In this paper we focus on qualitative reasoning aspects of knowledge representation for robotics and argue why they are appropriate for building robust contr ...
... reactive systems as an implementation of reflexive actions whereas classical AI systems are implementing the more strategic planning approach. In this paper we focus on qualitative reasoning aspects of knowledge representation for robotics and argue why they are appropriate for building robust contr ...