




An Emotional Mimicking Humanoid Biped Robot and its Quantum
... and integrated them to our robot theatre system with its various capabilities such as: sensors, vision, speech recognition and synthesis and Common Robot Language [oo]. OpenCV software from Intel [17] is used for image acquisition and robot vision algorithms. In this paper we would like to share our ...
... and integrated them to our robot theatre system with its various capabilities such as: sensors, vision, speech recognition and synthesis and Common Robot Language [oo]. OpenCV software from Intel [17] is used for image acquisition and robot vision algorithms. In this paper we would like to share our ...

A Developmental Approach to Intelligence
... Heikkonen and Koikkalainen were some of the first researchers to demonstrate the feasibility of using a selforganizing map that associates sensors and motors as a controller (Heikkonen & Koikkalainen 1997). Furthermore, they showed that this association map could be developed incrementally through t ...
... Heikkonen and Koikkalainen were some of the first researchers to demonstrate the feasibility of using a selforganizing map that associates sensors and motors as a controller (Heikkonen & Koikkalainen 1997). Furthermore, they showed that this association map could be developed incrementally through t ...



Intelligent Robot Based on Synaptic Plasticity Web Site: www.ijaiem.org Email:
... Based on above discussion it can be concluded that an Intelligent Robot has been implemented and trained to transport things from one place to another. Goal is to design a neural network that would model some real world phenomena using microcontroller and to learn the usage of microcontrollers and s ...
... Based on above discussion it can be concluded that an Intelligent Robot has been implemented and trained to transport things from one place to another. Goal is to design a neural network that would model some real world phenomena using microcontroller and to learn the usage of microcontrollers and s ...


Slide 1 - Universitas Ciputra
... • Psychology as a science started in 1800 and considered as a young science. • There are numerous philosophers in the 17th and 18th century like, Hobbes, Locke, Kant, and Hume formed the basic of psychology. • Psychology is established as a science in the late 19th century. ...
... • Psychology as a science started in 1800 and considered as a young science. • There are numerous philosophers in the 17th and 18th century like, Hobbes, Locke, Kant, and Hume formed the basic of psychology. • Psychology is established as a science in the late 19th century. ...
Application of intelligent control systems
... when people might be stuck or even not able to perform such operation. Let we have crane and we need to carry some object from point to point in the shortest time. The main problem in moving object via crane is the emergence of swinging it that leads to performance degradation, increasing transporta ...
... when people might be stuck or even not able to perform such operation. Let we have crane and we need to carry some object from point to point in the shortest time. The main problem in moving object via crane is the emergence of swinging it that leads to performance degradation, increasing transporta ...
Impact of attribute selection on the accuracy of
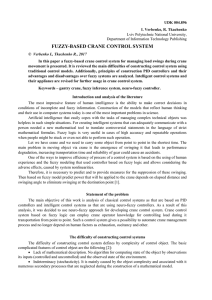
... where rzc is the correlation between the summed feature subsets and the class variable, k is the number of subset features, rzi is the average of the correlations between the subset features an the class variable, and rii is the average inter-correlation between subset features [7]. 3.2 Consistency ...
... where rzc is the correlation between the summed feature subsets and the class variable, k is the number of subset features, rzi is the average of the correlations between the subset features an the class variable, and rii is the average inter-correlation between subset features [7]. 3.2 Consistency ...

How AI is affecting kids` brains
... minimal elements and used as a tool for profound engagement and empathy – as ‘cute’ emerges as the quickest route to emotional connection. And it’s often at its most potent when simplicity combines with relative emotional complexity. Robots than can beat Gary Kasparov at chess may be intellectually ...
... minimal elements and used as a tool for profound engagement and empathy – as ‘cute’ emerges as the quickest route to emotional connection. And it’s often at its most potent when simplicity combines with relative emotional complexity. Robots than can beat Gary Kasparov at chess may be intellectually ...




WHEN THE visual cortex in the occipital lobe is electrically
... We were able to elicit phosphenes by intracortical stimulations within the subject's central 2" of visual field against both this epileptiform background 'light' and the normal. visual input from the retina which appeared to have remained unaffected. No epileptiform activity was experienced by the o ...
... We were able to elicit phosphenes by intracortical stimulations within the subject's central 2" of visual field against both this epileptiform background 'light' and the normal. visual input from the retina which appeared to have remained unaffected. No epileptiform activity was experienced by the o ...

A non-invasive method to relate the timing of neural activity to white
... slices of a representative MNI-normalized individual T1 volume (Fig. 4). MNI coordinates for the voxel with the maximum correlation within each cluster were transformed to standard Talairach space using an algorithm developed by Matthew Brett (http://imaging.mrc-cbu.cam.ac.uk/imaging/ MniTalairach). ...
... slices of a representative MNI-normalized individual T1 volume (Fig. 4). MNI coordinates for the voxel with the maximum correlation within each cluster were transformed to standard Talairach space using an algorithm developed by Matthew Brett (http://imaging.mrc-cbu.cam.ac.uk/imaging/ MniTalairach). ...

