


Chapter Two: Vector Spaces
... Show that it is not a subspace of R3. (Hint. See Example 2.5). Show that it is a vector space. ( To save time, you need only prove axioms (d) & (j), and closure under all linear combinations of 2 vectors.) Show that any subspace of R3 must pass thru the origin, and so any subspace of R3 must involve ...
... Show that it is not a subspace of R3. (Hint. See Example 2.5). Show that it is a vector space. ( To save time, you need only prove axioms (d) & (j), and closure under all linear combinations of 2 vectors.) Show that any subspace of R3 must pass thru the origin, and so any subspace of R3 must involve ...




Systems of Equations Final Review Assignment
... $72. One CD and three tapes cost $52. What are the prices of one CD and one tape? (d) An aerobics club has an initial fee and a monthly fee. The cost for a six-month membership of $220 and the cost for a one-year membership is $340. Write equations to determine the initial fee and the monthly fee. ( ...
... $72. One CD and three tapes cost $52. What are the prices of one CD and one tape? (d) An aerobics club has an initial fee and a monthly fee. The cost for a six-month membership of $220 and the cost for a one-year membership is $340. Write equations to determine the initial fee and the monthly fee. ( ...

Study Guide - URI Math Department
... Defn 5. A set S generates a vector space V if span(S) = V . Example 1. R2 = V and {(1, 0), (0, 1)} = S. Defn 6. A subset S of a vector space V is called linearly dependent if there exists a finite number of distinct scalars and vectors, not all zero, such that a1 v1 + · · · + an vn = 0. Also, we say ...
... Defn 5. A set S generates a vector space V if span(S) = V . Example 1. R2 = V and {(1, 0), (0, 1)} = S. Defn 6. A subset S of a vector space V is called linearly dependent if there exists a finite number of distinct scalars and vectors, not all zero, such that a1 v1 + · · · + an vn = 0. Also, we say ...


Document
... A linear equation is an equation whose solutions fall on a straight line on the coordinate plane . All solutions of a particular linear equation fall on the line, and all the points on the line are solutions of the equation. ...
... A linear equation is an equation whose solutions fall on a straight line on the coordinate plane . All solutions of a particular linear equation fall on the line, and all the points on the line are solutions of the equation. ...


5.5 Writing Equations in Point
... form. This is another way to write an equation when given a point and the slope or two points. Point-Slope Form: y y1 m( x x1 ) where ( x1 , y1 ) is a point on the line and m is the slope. To change an equation from point-slope to slope-intercept form, just solve for y ...
... form. This is another way to write an equation when given a point and the slope or two points. Point-Slope Form: y y1 m( x x1 ) where ( x1 , y1 ) is a point on the line and m is the slope. To change an equation from point-slope to slope-intercept form, just solve for y ...

Dot Product, Cross Product, Determinants
... A2 = (a2 b3 − a3 b2 )2 + (a3 b1 − a1 b3 )2 + (a1 b2 − a2 b1 )2 . Hence A = k~xk with the vector ~x defined by ~x := (a2 b3 − a3 b2 , a3 b1 − a1 b3 , a1 b2 − a2 b1 ). Note that x j = ak b` − a` bk where 1. j, k, ` are different 2. k, ` are in “positive order” if we arrange 1,2,3 on a circle. This vec ...
... A2 = (a2 b3 − a3 b2 )2 + (a3 b1 − a1 b3 )2 + (a1 b2 − a2 b1 )2 . Hence A = k~xk with the vector ~x defined by ~x := (a2 b3 − a3 b2 , a3 b1 − a1 b3 , a1 b2 − a2 b1 ). Note that x j = ak b` − a` bk where 1. j, k, ` are different 2. k, ` are in “positive order” if we arrange 1,2,3 on a circle. This vec ...



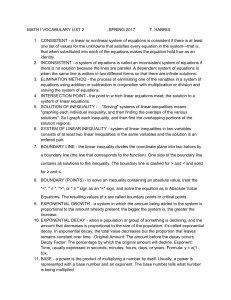
File - HARRISVILLE 7
... one set of values for the unknowns that satisfies every equation in the system—that is, that when substituted into each of the equations makes the equation hold true as an identity. 2. INCONSISTENT - a system of equations is called an inconsistent system of equations if there is no solution because ...
... one set of values for the unknowns that satisfies every equation in the system—that is, that when substituted into each of the equations makes the equation hold true as an identity. 2. INCONSISTENT - a system of equations is called an inconsistent system of equations if there is no solution because ...




MATH 1314 SPRING 2015 6.1 6.2 systems
... ordered pair that satisfies each equation in the system. Finding the set of all solutions is called solving the system of equations. Example 1 Determine whether 4, 1 is a solution of the system x 2 y 2 ...
... ordered pair that satisfies each equation in the system. Finding the set of all solutions is called solving the system of equations. Example 1 Determine whether 4, 1 is a solution of the system x 2 y 2 ...



Linear algebra

Linear algebra is the branch of mathematics concerning vector spaces and linear mappings between such spaces. It includes the study of lines, planes, and subspaces, but is also concerned with properties common to all vector spaces.The set of points with coordinates that satisfy a linear equation forms a hyperplane in an n-dimensional space. The conditions under which a set of n hyperplanes intersect in a single point is an important focus of study in linear algebra. Such an investigation is initially motivated by a system of linear equations containing several unknowns. Such equations are naturally represented using the formalism of matrices and vectors.Linear algebra is central to both pure and applied mathematics. For instance, abstract algebra arises by relaxing the axioms of a vector space, leading to a number of generalizations. Functional analysis studies the infinite-dimensional version of the theory of vector spaces. Combined with calculus, linear algebra facilitates the solution of linear systems of differential equations.Techniques from linear algebra are also used in analytic geometry, engineering, physics, natural sciences, computer science, computer animation, and the social sciences (particularly in economics). Because linear algebra is such a well-developed theory, nonlinear mathematical models are sometimes approximated by linear models.