


Document
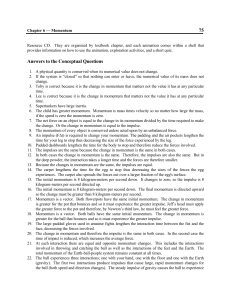
... 12. How much work is done by the force shown below when it acts on an object and pushes it from x = 1.0 m to x = 4.0 m? The force is not constant between 1m and 4 m so to find the work done, must take the area under the F-x curve area = W1-4 = area of the shapes shown= 0.9J ...
... 12. How much work is done by the force shown below when it acts on an object and pushes it from x = 1.0 m to x = 4.0 m? The force is not constant between 1m and 4 m so to find the work done, must take the area under the F-x curve area = W1-4 = area of the shapes shown= 0.9J ...




Chapter 8
... transformation of mechanical energy within the system The work done by a conservative force on a particle moving between any two points is independent of the path taken by the particle The work done by a conservative force on a particle moving through any closed path is ...
... transformation of mechanical energy within the system The work done by a conservative force on a particle moving between any two points is independent of the path taken by the particle The work done by a conservative force on a particle moving through any closed path is ...



Physics 513 Name Vaughan Worksheet Newton`s Second Law
... 21. A hockey puck (with a mass of 0.5 kg) is sliding across the ice with an initial velocity of 4 m/s East. It slows down and comes to rest over 100 meters. a) What is the magnitude and direction of the frictional force? b) What is the coefficient of friction? 22. Find the coefficient of kinetic fr ...
... 21. A hockey puck (with a mass of 0.5 kg) is sliding across the ice with an initial velocity of 4 m/s East. It slows down and comes to rest over 100 meters. a) What is the magnitude and direction of the frictional force? b) What is the coefficient of friction? 22. Find the coefficient of kinetic fr ...

Integrated Science Academic - Pompton Lakes School District
... and places those with similar chemical properties in columns, the repeating patterns of this table reflect patterns of outer electron states. (HS-PS1-1) The structure and interactions of matter at the bulk scale are determined by electrical forces within and between atoms. (HS-PS1-3) PS2.A: Forces ...
... and places those with similar chemical properties in columns, the repeating patterns of this table reflect patterns of outer electron states. (HS-PS1-1) The structure and interactions of matter at the bulk scale are determined by electrical forces within and between atoms. (HS-PS1-3) PS2.A: Forces ...



Angular Momentum
... a) the angular momentum of the system b) the linear momentum of the system c) both the linear & angular momentum of the system d) neither the linear & angular momentum of the system as long as no net external forces or torques act on the system, linear and angular momentum are both conserved and do ...
... a) the angular momentum of the system b) the linear momentum of the system c) both the linear & angular momentum of the system d) neither the linear & angular momentum of the system as long as no net external forces or torques act on the system, linear and angular momentum are both conserved and do ...

Newton`s Second Law
... Axes: Both axes should be clearly labeled with the name of the quantity being plotted and the units: Time (s) and Speed (m/s). The range of values plotted should be chosen so the data fill most of the graph. For example, if the feather takes 3 s to fall, the x-axis should be from 0 to 3 s or better ...
... Axes: Both axes should be clearly labeled with the name of the quantity being plotted and the units: Time (s) and Speed (m/s). The range of values plotted should be chosen so the data fill most of the graph. For example, if the feather takes 3 s to fall, the x-axis should be from 0 to 3 s or better ...


Appendix E: Sample Lab Report
... the building does not change when different objects are dropped. Now that we have shown that the results of our measurements are consistent with physics as we understand it, how do we explain our experience? We know that if we drop a coin and a piece of paper at the same time, the coin hits the grou ...
... the building does not change when different objects are dropped. Now that we have shown that the results of our measurements are consistent with physics as we understand it, how do we explain our experience? We know that if we drop a coin and a piece of paper at the same time, the coin hits the grou ...



Ph201_CH4_worksheet
... e. Identify as many “Action-Reaction” Force Pairs as you can in this example. ...
... e. Identify as many “Action-Reaction” Force Pairs as you can in this example. ...


chapter 2 - UniMAP Portal
... weight is a derived unit. Typically, mass is specified in kilograms (kg), and weight is calculated from W = mg. If the gravitational acceleration (g) is specified in units of m/s2, then the weight is expressed in newtons (N). On the earth’s surface, g can be taken as g = 9.81 m/s2. W (N) = m (kg) g ...
... weight is a derived unit. Typically, mass is specified in kilograms (kg), and weight is calculated from W = mg. If the gravitational acceleration (g) is specified in units of m/s2, then the weight is expressed in newtons (N). On the earth’s surface, g can be taken as g = 9.81 m/s2. W (N) = m (kg) g ...